吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (3): 643-652.doi: 10.13229/j.cnki.jdxbgxb20221427
• 通信与控制工程 • 上一篇
基于车辆执行驱动能力的复杂路况速度规划及控制
王德军1,2( ),张凯然1,2,徐鹏2,顾添骠1,2,于文雅1,2
),张凯然1,2,徐鹏2,顾添骠1,2,于文雅1,2
- 1.吉林大学 汽车仿真与控制国家重点实验室,长春 130022
2.吉林大学 通信工程学院,长春 130022
Speed planning and control under complex road conditions based on vehicle executive capability
De-jun WANG1,2(),Kai-ran ZHANG1,2,Peng XU2,Tian-biao GU1,2,Wen-ya YU1,2
- 1.State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun 130022,China
2.College of Communication Engineering,Jilin University,Changchun 130022,China
摘要:
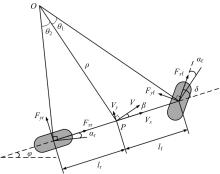
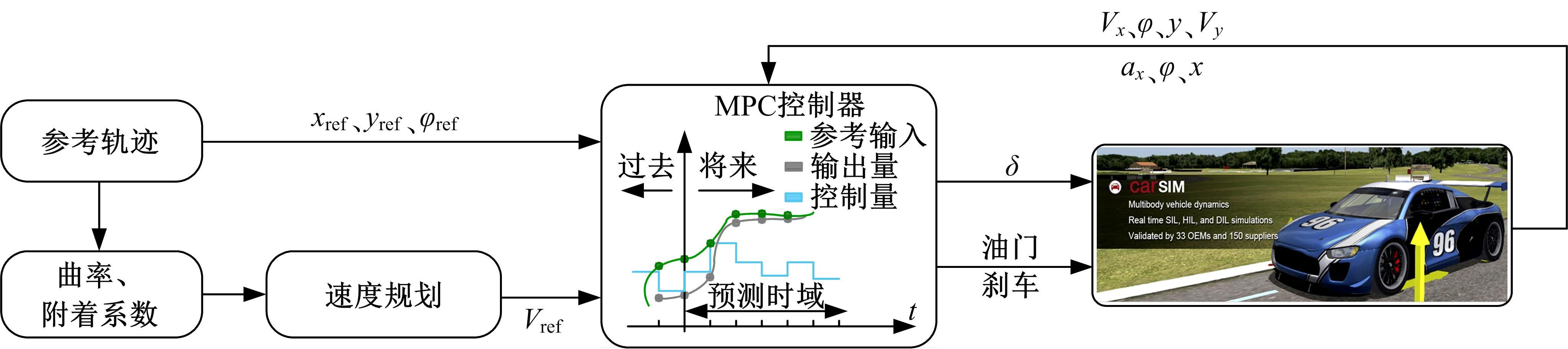
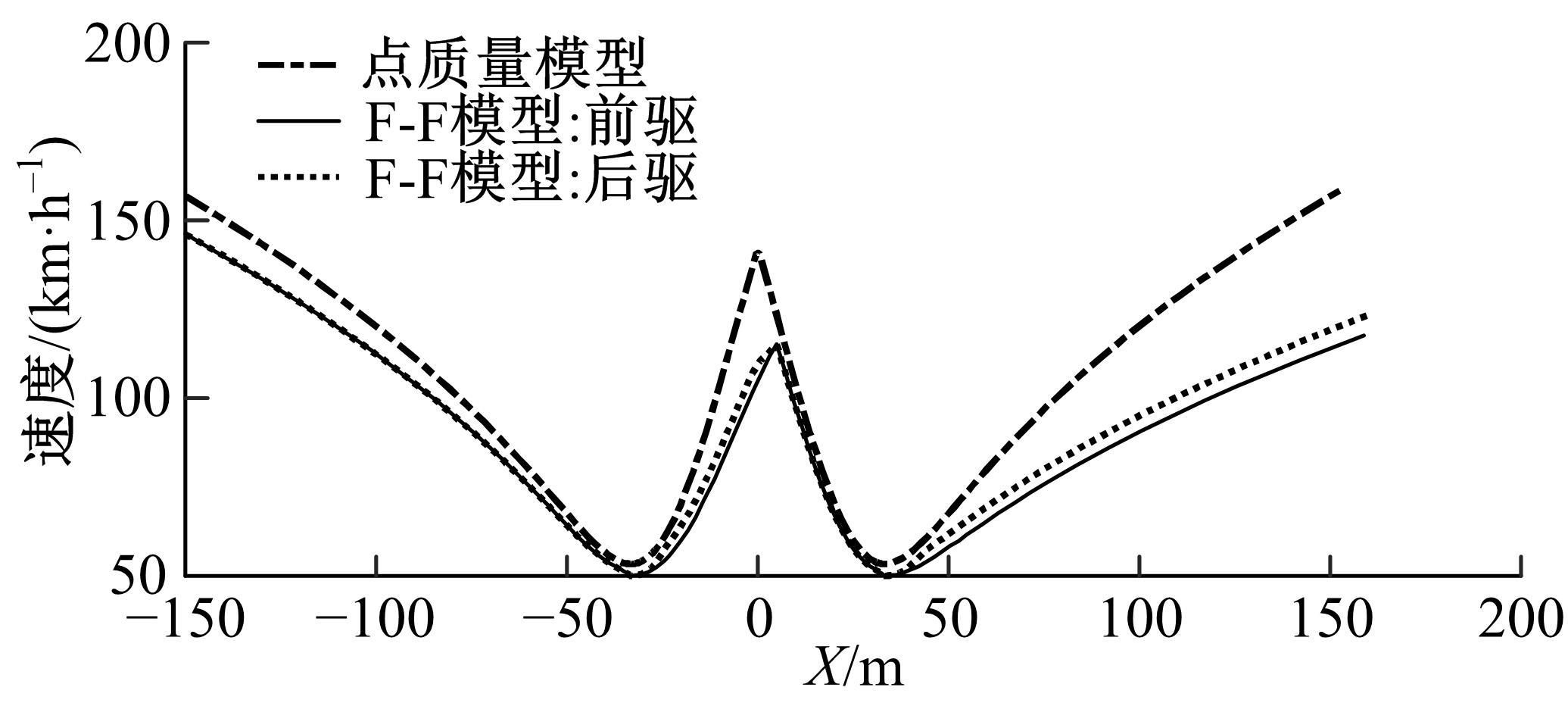
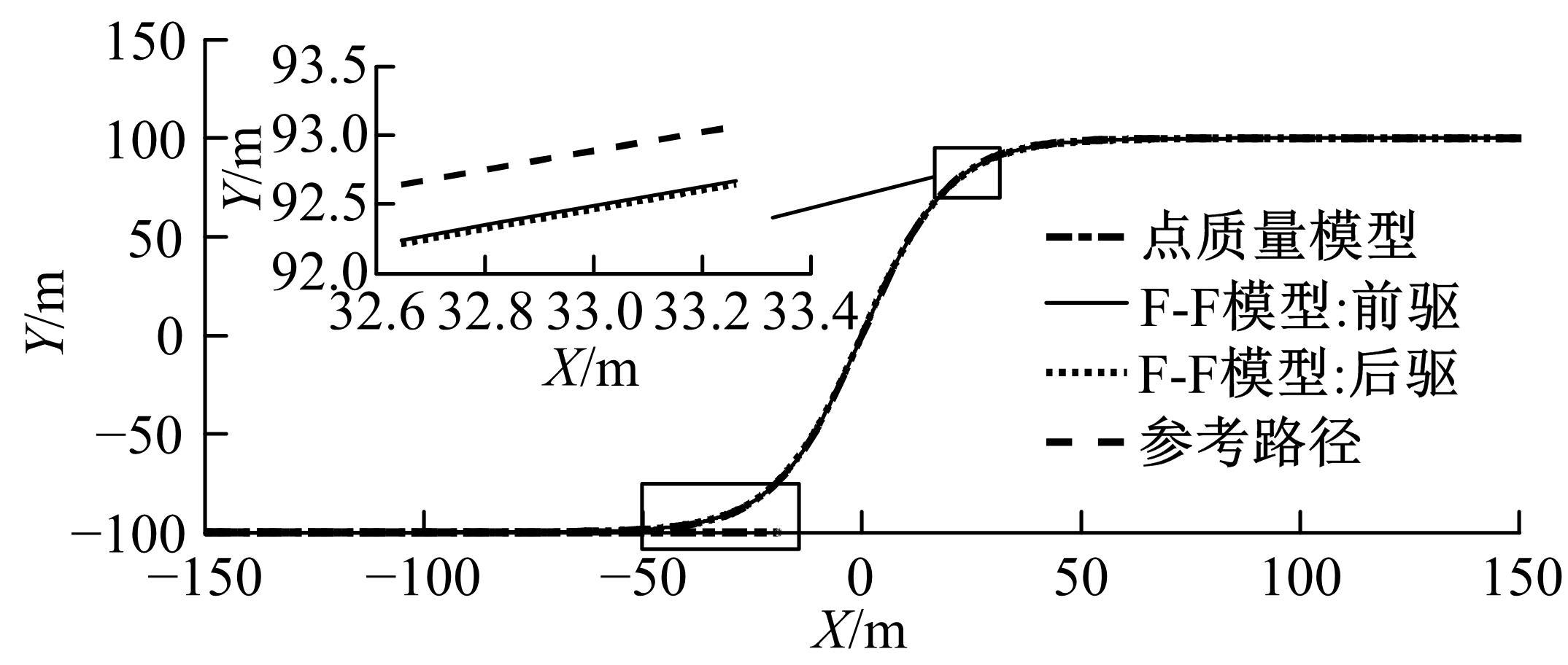
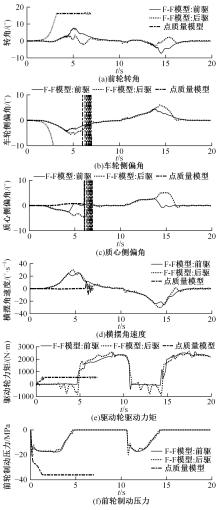
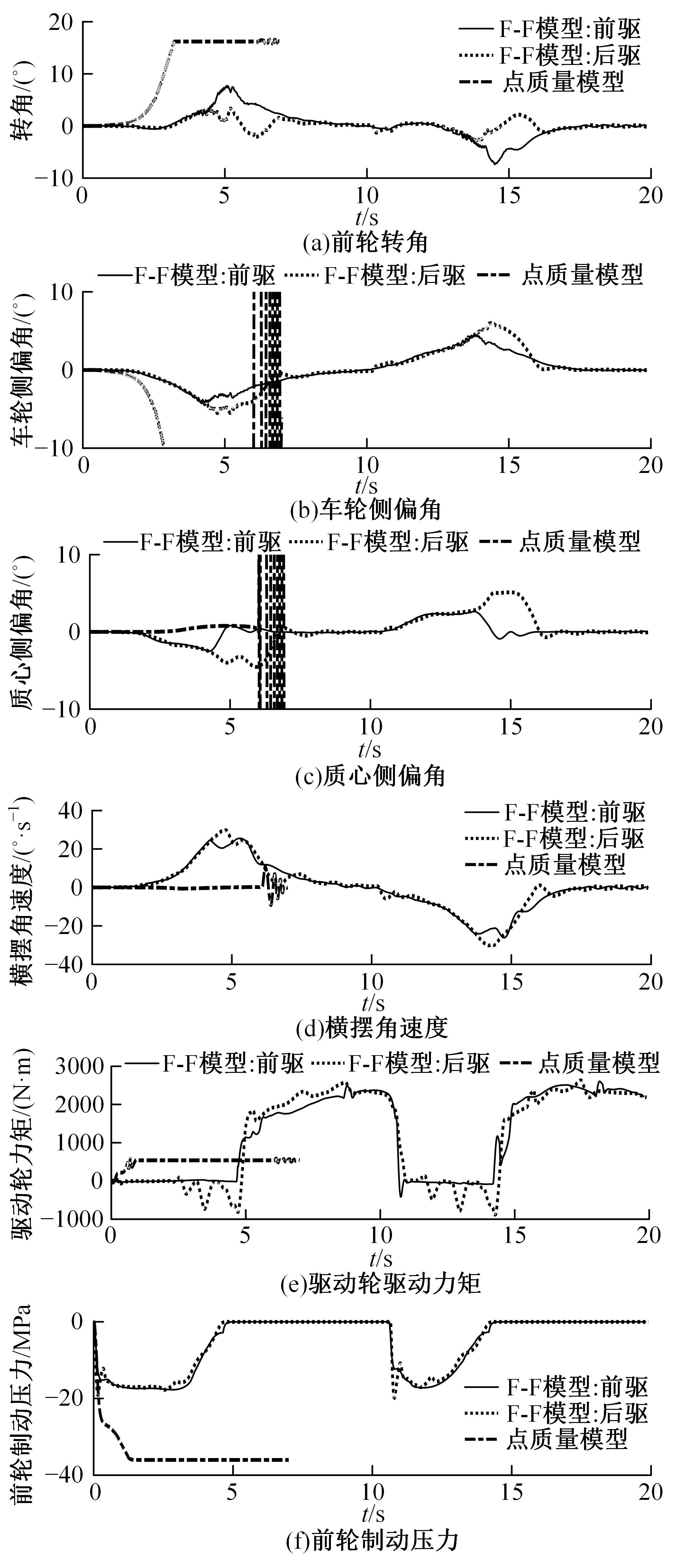
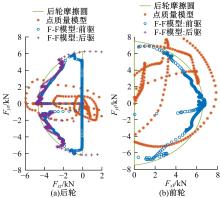
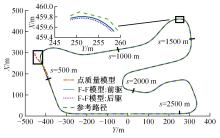
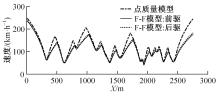
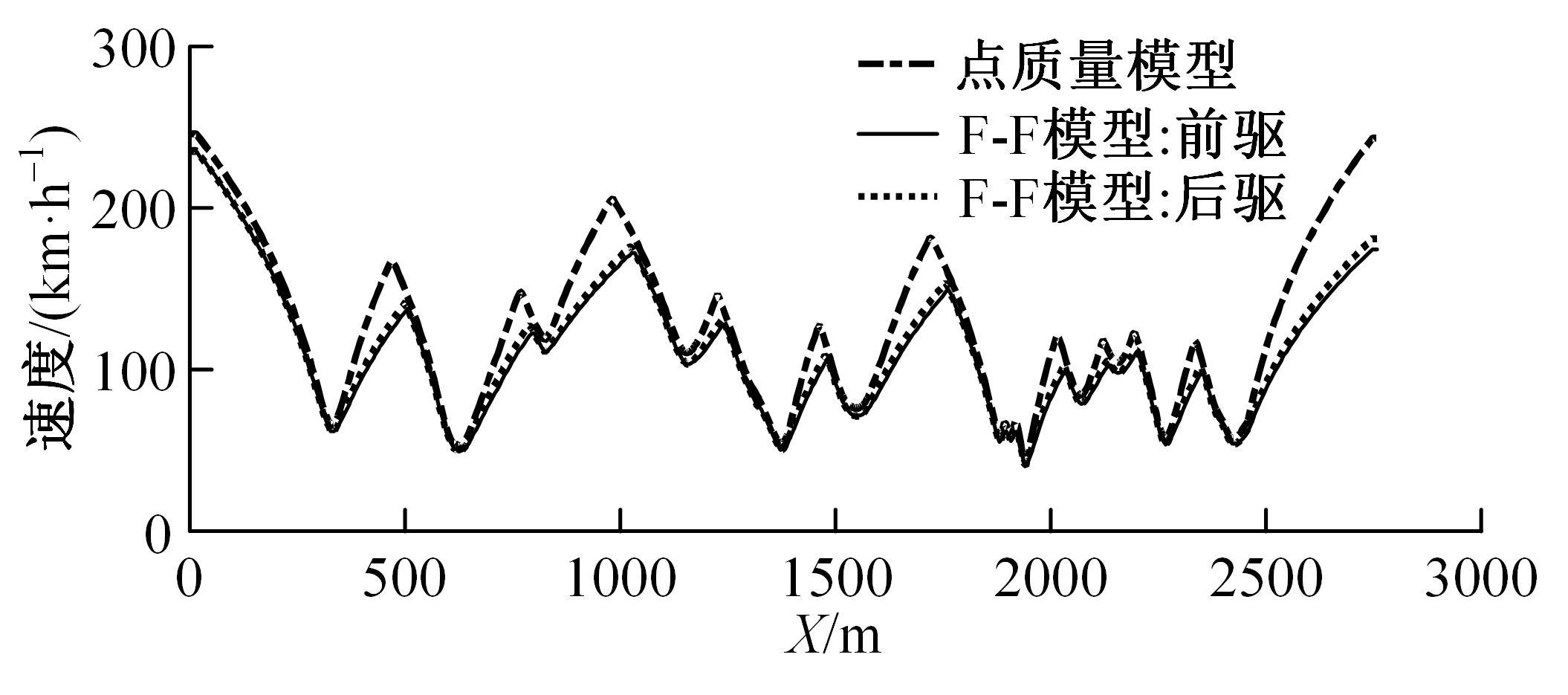
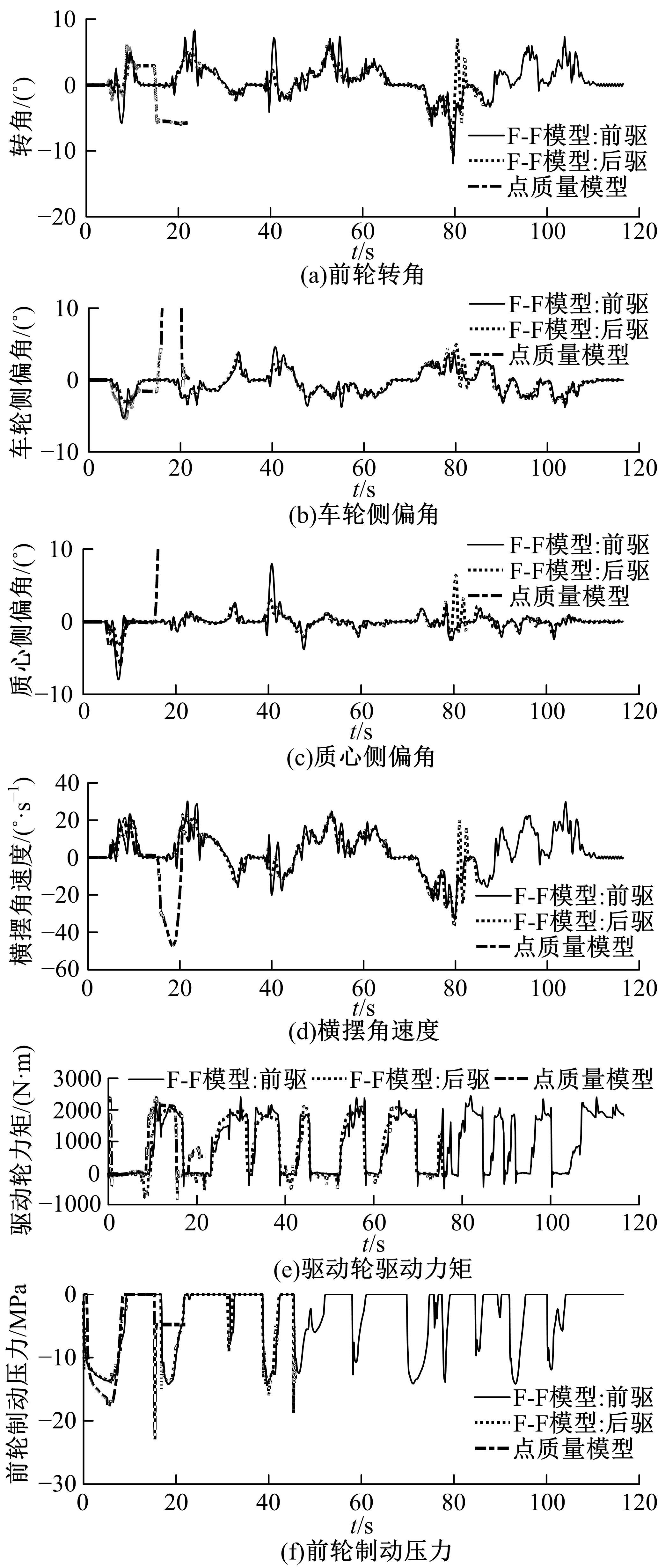
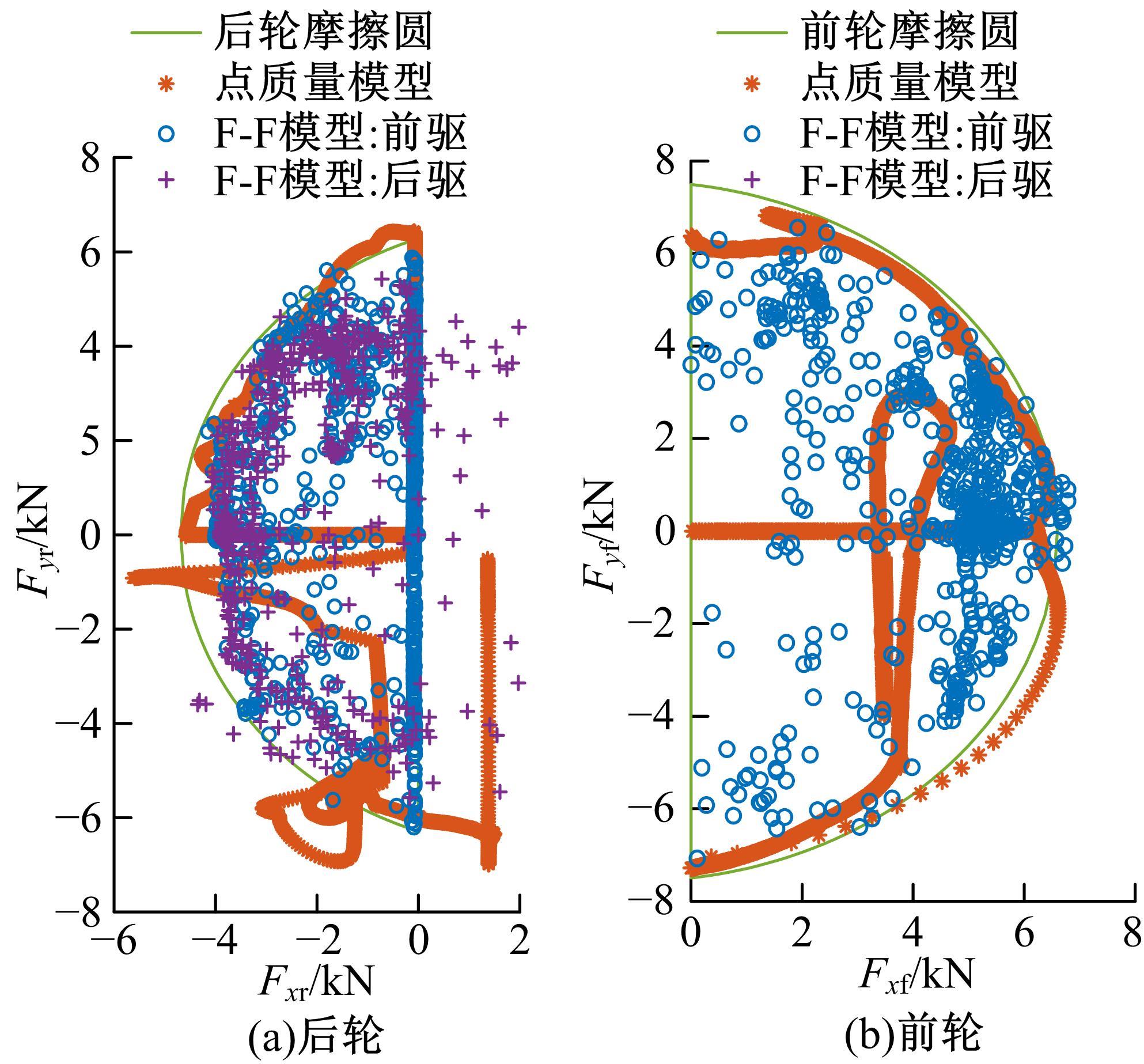
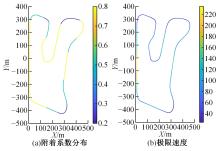
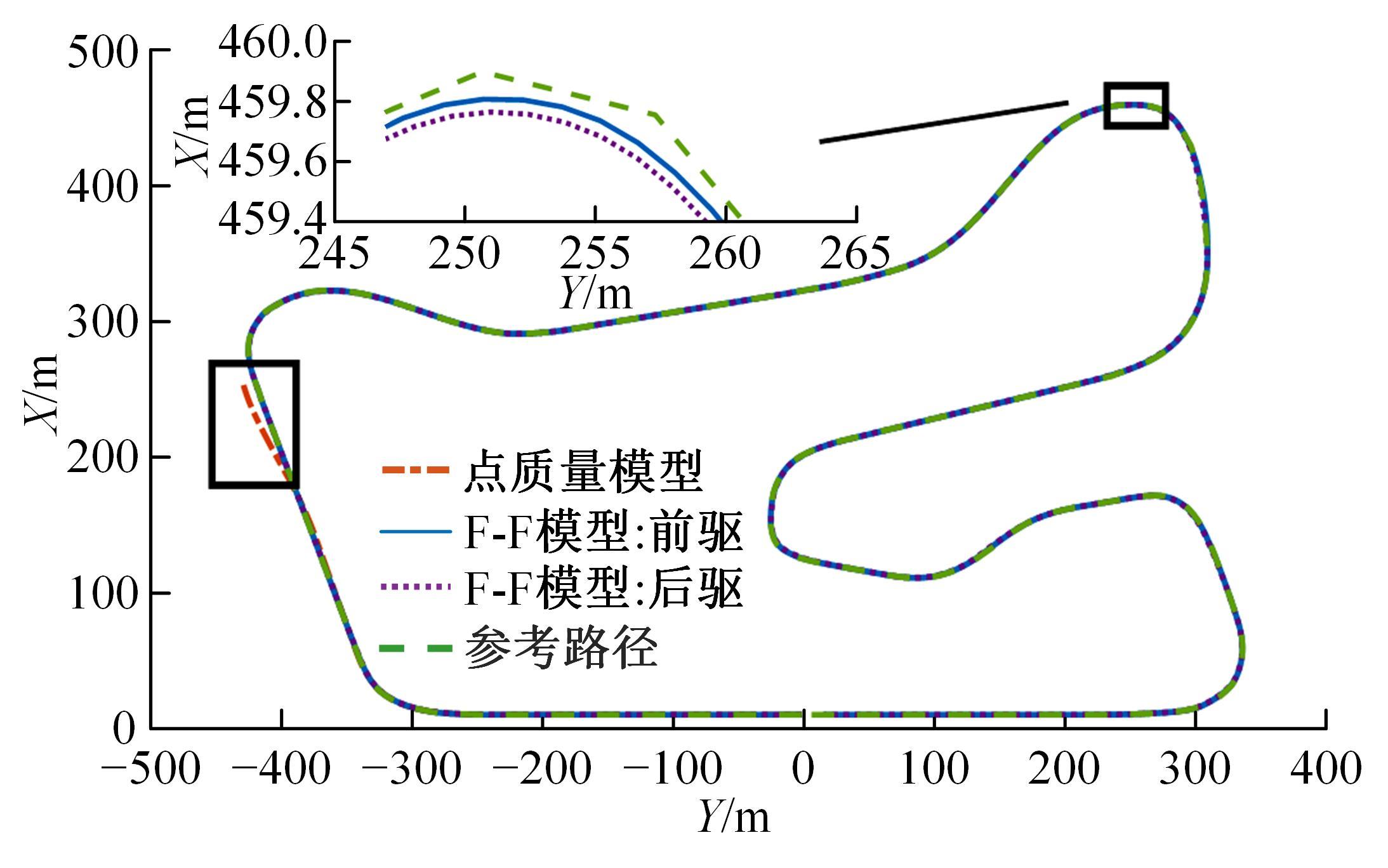
为解决复杂道路环境(大曲率、低附着)下满足安全性和高效性约束的车速规划问题,提出了一种基于车辆动力学解析的微分方程规划方法。首先,推导了在稳态转向时满足侧向轮胎力约束的极限速度结构参数表达式。其次,将前轮和后轮的轮胎力执行空间组合为F-F图,得到考虑载荷转移和驱动方式因素的隐式微分方程,并求解该微分方程得到沿路径的极限速度,同时给出了面向离散路径信息的极限速度计算方法。最后,设计了横、纵向协同模型预测控制器,搭建了CarSim和Simulink联合仿真平台,在连续和离散两种信息路径上以规划的极限速度进行轨迹跟踪仿真实验。结果表明,本文提出的极限速度规划方法能够在尽快完成复杂路面环境下轨迹跟踪任务的同时,将轮胎力控制在稳定摩擦圆范围内。
中图分类号:
- TP273















| 1 | Wang De-jun, Qu Zhuo, Ding Jian-nan. Tire force distribution method with the constraints of executable drive space consideration[J]. IEEE Transactions on Vehicular Technology, 2018, 67(12): 11427-11439. |
| 2 | 陈国迎, 姚军, 王鹏, 等. 适用于后轮轮毂驱动车辆的稳定性控制策略[J]. 吉林大学学报: 工学版, 2021, 51(2): 397-405. |
| Chen Guo-ying, Yao Jun, Wang Peng, et al. Stability control strategy for rear in-wheel motor drive vehicle[J]. Journal of Jilin University (Engineering and Technology Edition), 2021, 51(2): 397-405. | |
| 3 | Chen Yong, Chen Si-zhong, Zhao Yu-zhuang, et al. Optimized handling stability control strategy for a four in-wheel motor independent-drive electric vehicle[J]. IEEE Access, 2019, 7: 17017-17032. |
| 4 | Li Sheng-bo, Chen Hai-liang, Li Ren-jie, et al. Predictive lateral control to stabilise highly automated vehicles at tire-road friction limits[J]. Vehicle System Dynamics, 2020, 58(5): 768-786. |
| 5 | Imani M M, Limebeer D J N. Region of attraction analysis for nonlinear vehicle lateral dynamics using sum-of-squares programming[J]. Vehicle System Dynamics, 2018, 56(7): 1118-1138. |
| 6 | Laurense V A, Gerdes J C. Speed control for robust path-tracking for automated vehicles at the tire–road friction limit[J/OL]. [2022-11-05]. t i r e - r o a d _friction_ |
| limit_ 0.pdf | |
| 7 | Massaro M, Limebeer D J N. Minimum-lap-time optimisation and simulation[J]. Vehicle System Dynamics, 2021, 59(7): 1069-1113. |
| 8 | Laurense V A, Goh J Y, Gerdes J C. Path-tracking for autonomous vehicles at the limit of friction[C]∥2017 American Control Conference (ACC), Seattle, WA, USA, 2017: 5586-5591. |
| 9 | Parra A, Tavernini D, Gruber P, et al. On pre-emptive vehicle stability control[J]. Vehicle System Dynamics, 2022, 60(6): 2098-2123. |
| 10 | Herrmann T, Wischnewski A, Hermansdorfer L, et al. Real-time adaptive velocity optimization for autonomous electric cars at the limits of handling[J]. IEEE Transactions on Intelligent Vehicles, 2020, 6(4): 665-677. |
| 11 | Duhr P, Sandeep A, Cerofolini A, et al. Convex performance envelope for minimum lap time energy management of race cars[J]. IEEE Transactions on Vehicular Technology, 2022, 71(8): 8280-8295. |
| 12 | Dal Bianco N, Bertolazzi E, Biral F, et al. Comparison of direct and indirect methods for minimum lap time optimal control problems[J]. Vehicle System Dynamics, 2019, 57(5): 665-696. |
| 13 | Chen Jie, Song Jian, Li Liang, et al. A novel pre-control method of vehicle dynamics stability based on critical stable velocity during transient steering maneuvering[J]. Chinese Journal of Mechanical Engineering, 2016, 29(3): 475-485. |
| 14 | Kritayakirana K, Gerdes J C. Autonomous vehicle control at the limits of handling[J]. International Journal of Vehicle Autonomous Systems, 2012, 10(4): 271-296. |
| 15 | Subosits J, Gerdes J C. Autonomous vehicle control for emergency maneuvers: the effect of topography[C]∥2015 American Control Conference (ACC), Chicago, IL, USA,2015: 1405-1410. |
| 16 | 陈龙, 解云鹏, 蔡英凤, 等. 极限工况下无人驾驶车辆稳定跟踪控制[J]. 汽车工程, 2020, 42(8): 1016-1026. |
| Chen Long, Xie Yun-peng, Cai Ying-feng, et al. Stable tracking control of autonomous vehicles at extreme conditions[J]. Automotive Engineering, 2020, 42(8): 1016-1026. | |
| 17 | 余志生. 汽车理论[M]. 北京: 机械工业出版社, 2009. |
| 18 | Pacejka H B, Sharp R S. Shear force development by pneumatic tyres in steady state conditions: a review of modelling aspects[J]. Vehicle System Dynamics, 1991, 20(3): 121-175. |
| 19 | 陈虹. 模型预测控制[M]. 北京: 科学出版社, 2013. |
| [1] | 胡云峰,于彤,杨惠策,孙耀. 低温环境下燃料电池启动优化控制方法[J]. 吉林大学学报(工学版), 2022, 52(9): 2034-2043. |
| [2] | 聂光明,谢波,田彦涛. 基于Frenet框架的协同自适应巡航控制算法设计[J]. 吉林大学学报(工学版), 2022, 52(7): 1687-1695. |
| [3] | 吴文静,战勇斌,杨丽丽,陈润超. 考虑安全间距的合流区可变限速协调控制方法[J]. 吉林大学学报(工学版), 2022, 52(6): 1315-1323. |
| [4] | 李文航,倪涛,赵丁选,张泮虹,师小波. 基于集合卡尔曼滤波的高机动救援车辆主动悬挂控制方法[J]. 吉林大学学报(工学版), 2022, 52(12): 2816-2826. |
| [5] | 彭浩楠,唐明环,查奇文,王伟忠,王伟达,项昌乐,刘玉龙. 自动驾驶汽车双车道换道最优轨迹规划方法[J]. 吉林大学学报(工学版), 2022, 52(12): 2852-2863. |
| [6] | 杨志军,高忠义,王丽君,黄观新,危宇泰. 面向刚柔耦合定位平台的模型预测控制算法[J]. 吉林大学学报(工学版), 2022, 52(12): 2806-2815. |
| [7] | 冯建鑫,王强,王雅雷,胥彪. 基于改进量子遗传算法的超声电机模糊PID控制[J]. 吉林大学学报(工学版), 2021, 51(6): 1990-1996. |
| [8] | 王宏志,王婷婷,胡黄水,鲁晓帆. 基于Q学习优化BP神经网络的BLDCM转速PID控制[J]. 吉林大学学报(工学版), 2021, 51(6): 2280-2286. |
| [9] | 陈吉清,蓝庆生,兰凤崇,刘照麟. 基于轮胎力预判与拟合的轨迹跟踪控制[J]. 吉林大学学报(工学版), 2020, 50(5): 1565-1573. |
| [10] | 贾超,徐洪泽,王龙生. 基于多质点模型的列车自动驾驶非线性模型预测控制[J]. 吉林大学学报(工学版), 2020, 50(5): 1913-1922. |
| [11] | 吴爱国,韩俊庆,董娜. 基于极局部模型的机械臂自适应滑模控制[J]. 吉林大学学报(工学版), 2020, 50(5): 1905-1912. |
| [12] | 马彦,黄健飞,赵海艳. 基于车间通信的车辆编队控制方法设计[J]. 吉林大学学报(工学版), 2020, 50(2): 711-718. |
| [13] | 马苗苗,潘军军,刘向杰. 含电动汽车的微电网模型预测负荷频率控制[J]. 吉林大学学报(工学版), 2019, 49(5): 1644-1652. |
| [14] | 顾万里,王萍,胡云峰,蔡硕,陈虹. 具有H∞性能的轮式移动机器人非线性控制器设计[J]. 吉林大学学报(工学版), 2018, 48(6): 1811-1819. |
| [15] | 邓丽飞, 石要武, 朱兰香, 于丁力. SI发动机闭环系统故障检测[J]. 吉林大学学报(工学版), 2017, 47(2): 577-582. |
|
||