吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (1): 124-135.doi: 10.13229/j.cnki.jdxbgxb.20220207
• 交通运输工程·土木工程 • 上一篇
智能网联公交车出站强制换道的演化博弈机制
杜筱婧( ),姚荣涵()
),姚荣涵()
- 大连理工大学 交通运输学院,辽宁 大连 116024
Evolutionary game mechanism of mandatory lane changing for exiting for intelligent connected bus
Xiao-jing DU(),Rong-han YAO()
- School of Transportation and Logistics,Dalian University of Technology,Dalian 116024,China
摘要:
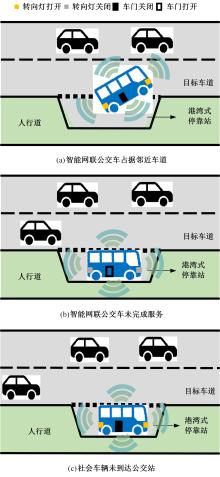
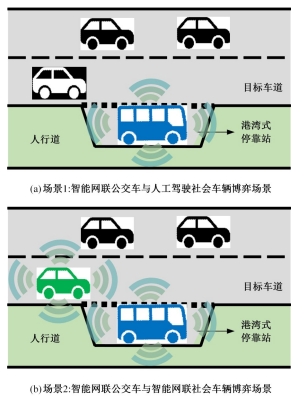
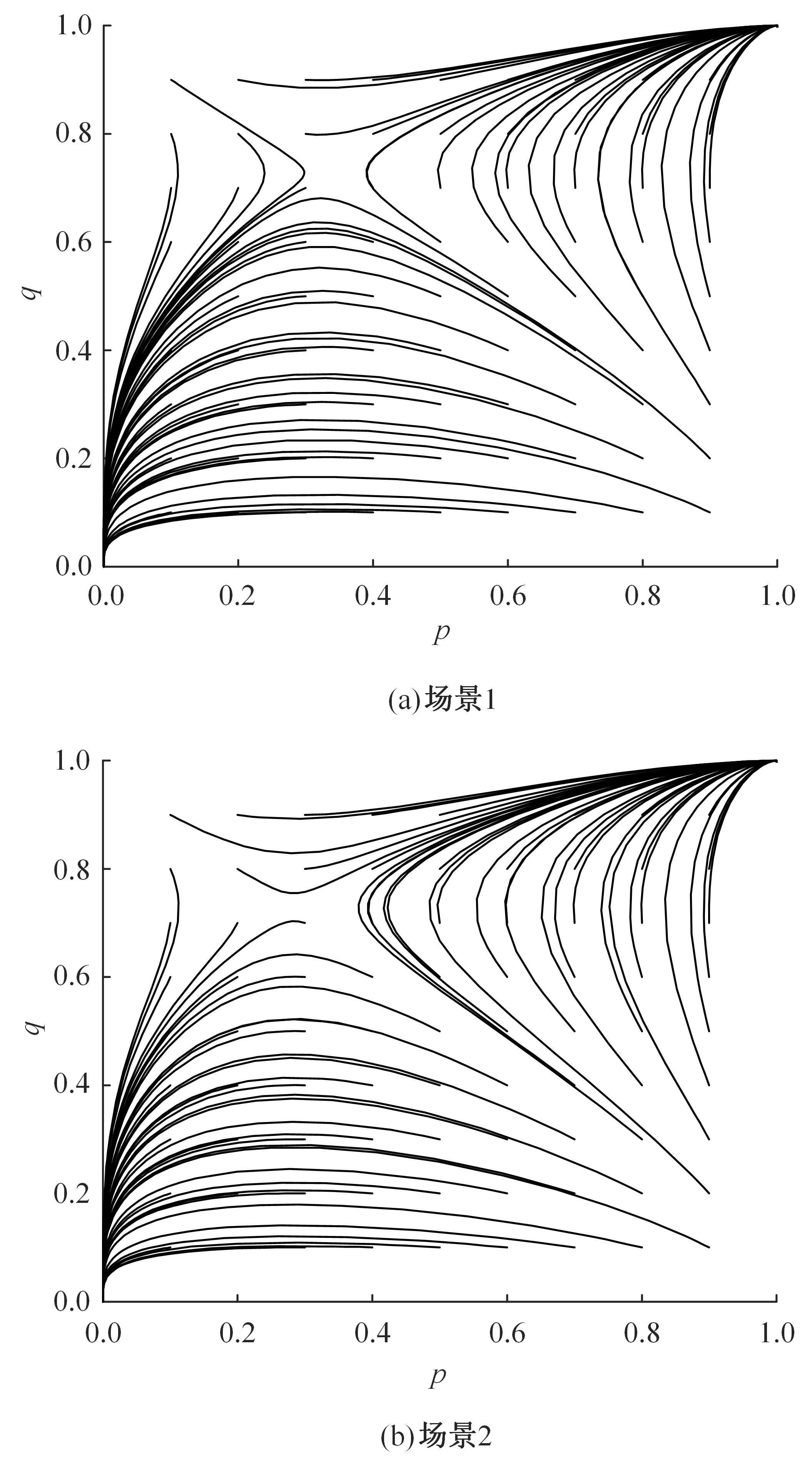
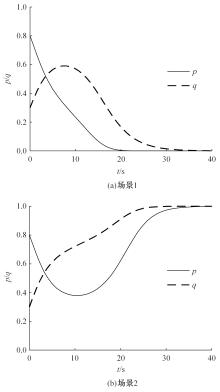
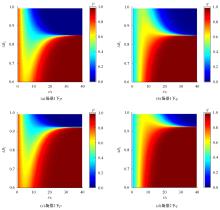
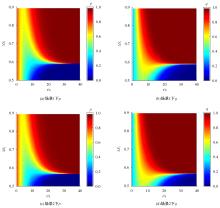
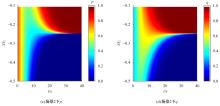
为缓解智能网联公交车出站强制换道时与社会车辆之间的冲突,分析了智能网联公交车与社会车辆行为决策的演化博弈机制。考虑社会车辆为人工驾驶社会车辆和智能网联社会车辆两种场景,从安全效用、时间效用和节能效用角度构建演化博弈效用函数,并以此建立演化博弈的复制动态方程。根据动态博弈系统的雅克比矩阵的行列式和迹,分析不同情况下博弈的均衡点及其稳定性,并探讨动态博弈系统对合作策略与非合作策略差值的灵敏度。结果表明,动态博弈系统可能的演化方向包括“智能网联公交车换道、社会车辆让路”,“智能网联公交车不换道、社会车辆不让路”和“智能网联公交车不换道、社会车辆让路”。从整体最优的角度看,调整社会车辆安全效用和时间效用的相关变量,能够保证更多车辆在智能网联公交车出站强制换道过程中的安全和效率。节能效用对(换道,让路)策略组合有促进作用,对(不换道,不让路)策略组合有抑制作用。
中图分类号:
- U121









| 1 | Li M, Li Z, Xu C, et al. Short-term prediction of safety and operation impacts of lane changes in oscillations with empirical vehicle trajectories[J]. Accident Analysis and Prevention, 2020, 135: No.105345. |
| 2 | Kita H. A merging-giveway interaction model of cars in a merging section: a game theoretic analysis[J]. Transportation Research Part A: Policy and Practice, 1999, 33: 305-312. |
| 3 | Arbis D, Dixit V V. Game theoretic model for lane changing: incorporating conflict risks[J]. Accident Analysis and Prevention, 2019, 125(1): 158-164. |
| 4 | 曲大义, 黑凯先, 郭海兵, 等. 车联网环境下车辆换道博弈行为及模型[J]. 吉林大学学报:工学版, 2021, 52(1): 101-109. |
| Qu Da-yi, Kai-xian Hei, Guo Hai-bing, et al. Game behavior and model of lane-changing on the internet of vehicles environment[J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 52(1): 101-109. | |
| 5 | Yao R, Du X, Zhang W, et al. Game model of lane changing for bus exiting at bus bay stops[J]. Journal of Transportation Engineering, Part A: Systems, 2021, 147(9): No.04021046. |
| 6 | Shao H, Wang J, Wang Y, et al. Electric bicycle lane-changing behavior under strategy games[J]. Sustainability, 2018, 10(9): No.3019. |
| 7 | Ali Y, Zheng Z, Haque Md M, et al. A game theory-based approach for modelling mandatory lane-changing behaviour in a connected environment[J]. Transportation Research Part C: Emerging Technologies, 2019, 106: 220-242. |
| 8 | Kang K, Rakha H A. Modeling driver merging behavior: a repeated game theoretical approach[J]. Journal of the Transportation Research Board, 2018, 2672(20): 144-153. |
| 9 | Lin D, Li L, Jabari S E. Pay to change lanes: a cooperative lane-changing strategy for connected/automated driving[J]. Transportation Research Part C: Emerging Technologies, 2019, 105: 550-564. |
| 10 | 李克强, 戴一凡, 李升波, 等. 智能网联汽车(ICV)技术的发展现状及趋势[J]. 汽车安全与节能学报, 2017, 8(1): 1-14. |
| Li Ke-qiang, Dai Yi-fan, Li Sheng-bo, et al. State-of-the-art and technical trends of intelligent and connected vehicles[J]. Journal of Automotive Safety and Energy, 2017, 8(1): 1-14. | |
| 11 | 崔明阳, 黄荷叶, 许庆, 等. 智能网联汽车架构、功能与应用关键技术[J]. 清华大学学报, 2022, 62(3): 493-508. |
| Cui Ming-yang, Huang He-ye, Xu Qing, et al. Survey of intelligent and connected vehicle technologies: architectures, functions and applications[J]. Journal of Tsinghua University(Science and Technology), 2022, 62(3): 493-508. | |
| 12 | Zhai C, Wu W. A macro traffic flow model with headway variation tendency and bounded rationality[J]. Modern Physics Letter B, 2021, 35(2): 2150054. |
| 13 | Yan F, Liu M, Ding C, et al. Driving style recognition based on electroencephalography data from a simulated driving experiment[J]. Frontiers in Psychology, 2019, 10: No.1254. |
| 14 | Huo D, Ma J, Chang R. Lane-changing-decision characteristics and the allocation of visual attention of drivers with an angry driving style[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2020, 71: 62-75. |
| 15 | Tanimoto J, Futamata M, Tanaka M. Automated vehicle control systems need to solve social dilemmas to be disseminated[J]. Chaos Solitons and Fractals, 2020, 138: No.109861. |
| 16 | Yao R, Du X, Qi W, et al. Evolutionary dynamics of mandatory lane changing for bus exiting[J]. Journal of Advanced Transportation, 2021, 2021: No.2958647. |
| 17 | 中华人民共和国交通运输部综合规划司. 2020年交通运输行业发展统计公报[EB/OL].[2022-02-28]. |
| 18 | Gao J, Chen H, Liu Y, et al. The effect of after-treatment techniques on the correlations between driving behaviours and NO x emissions of passenger cars[J]. Journal of Cleaner Production, 2021, 288: No.125647. |
| [1] | 马壮林,崔姗姗,胡大伟,王晋. 限行政策下传统小汽车出行者出行方式选择[J]. 吉林大学学报(工学版), 2023, 53(7): 1981-1993. |
| [2] | 张雅丽,付锐,袁伟,郭应时. 考虑能耗的进出站驾驶风格分类及识别模型[J]. 吉林大学学报(工学版), 2023, 53(7): 2029-2042. |
| [3] | 尹超英,陆颖,邵春福,马健霄,许得杰. 考虑空间自相关的建成环境对通勤方式选择的影响[J]. 吉林大学学报(工学版), 2023, 53(7): 1994-2000. |
| [4] | 潘恒彦,王永岗,李德林,陈俊先,宋杰,杨钰泉. 基于交通冲突的长纵坡路段追尾风险评估及预测[J]. 吉林大学学报(工学版), 2023, 53(5): 1355-1363. |
| [5] | 宋灿灿,荆迪菲,谢俊峰,康可心. 设置广告牌的高速公路平曲线路段驾驶行为分析[J]. 吉林大学学报(工学版), 2023, 53(5): 1345-1354. |
| [6] | 卢凯,徐广辉,叶志宏,林永杰. 考虑清空时间的双向队首绿波协调控制数解算法[J]. 吉林大学学报(工学版), 2023, 53(2): 421-429. |
| [7] | 曹倩,李志慧,陶鹏飞,马永建,杨晨曦. 考虑风险异质特性的路网交通事故风险评估方法[J]. 吉林大学学报(工学版), 2023, 53(10): 2817-2825. |
| [8] | 张鑫,张卫华. 快速路合流区主线不同交通状态下的安全性分析[J]. 吉林大学学报(工学版), 2022, 52(6): 1308-1314. |
| [9] | 彭浩楠,唐明环,查奇文,王伟忠,王伟达,项昌乐,刘玉龙. 自动驾驶汽车双车道换道最优轨迹规划方法[J]. 吉林大学学报(工学版), 2022, 52(12): 2852-2863. |
| [10] | 董春娇,董黛悦,诸葛承祥,甄理. 电动自行车出行特性及骑行决策行为建模[J]. 吉林大学学报(工学版), 2022, 52(11): 2618-2625. |
| [11] | 曲大义,赵梓旭,贾彦峰,王韬,刘琼辉. 基于Lennard-Jones势的车辆跟驰动力学特性及模型[J]. 吉林大学学报(工学版), 2022, 52(11): 2549-2557. |
| [12] | 张文会,伊静,刘委,于秋影,王连震. 基于MADYMO的大客车追尾碰撞事故乘员损伤机理[J]. 吉林大学学报(工学版), 2022, 52(1): 118-126. |
| [13] | 曲大义,黑凯先,郭海兵,贾彦峰,王韬. 车联网环境下车辆换道博弈行为及模型[J]. 吉林大学学报(工学版), 2022, 52(1): 101-109. |
| [14] | 刘志伟,刘建荣,邓卫. 基于潜在类别的无人驾驶汽车选择行为[J]. 吉林大学学报(工学版), 2021, 51(4): 1261-1268. |
| [15] | 徐进,潘存书,符经厚,刘俊,王郸祁. 典型道路场景以及场景切换时的速度行为特性[J]. 吉林大学学报(工学版), 2021, 51(4): 1331-1341. |
|
||