吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (3): 620-630.doi: 10.13229/j.cnki.jdxbgxb.20220542
• 车辆工程·机械工程 • 上一篇
基于改变控制时域时间步长的智能车轨迹跟踪控制
谢宪毅1,2( ),王禹涵3,金立生1(),赵鑫1,郭柏苍1,廖亚萍4,周彬5,李克强2
),王禹涵3,金立生1(),赵鑫1,郭柏苍1,廖亚萍4,周彬5,李克强2
- 1.燕山大学 车辆与能源学院,河北 秦皇岛 066004
2.清华大学 汽车安全与节能国家重点实验室,北京 100084
3.中国第一汽车集团公司 智能网联开发院,长春 130011
4.北京航空航天大学 特种车辆无人运输技术工业和信息化部重点实验室,北京 100191
5.北京航空航天大学 车路一体智能交通全国重点实验室,北京 100191
Intelligent vehicle trajectory tracking control based on adjusting step size of control horizon
Xian-yi XIE1,2(),Yu-han WANG3,Li-sheng JIN1(),Xin ZHAO1,Bai-cang GUO1,Ya-ping LIAO4,Bin ZHOU5,Ke-qiang LI2
- 1.School of Vehicle and Energy,Yanshan University,Qinhuangdao 066004,China
2.State Key Laboratory Automotive Safety and Energy,Tsinghua University,Beijing 100084,China
3.Electrical and Electronics,General R&D Institute of China FAW Co. ,Ltd. ,Changchun 130011,China
4.Key Laboratory of Unmanned Transportation Technology for Special Vehicles,Ministry of Industry and Information Technology,Beihang University,Beijing 100191,China
5.National Key Laboratory of Vehicle-Road Integrated Intelligent Transportation,Beihang University,Beijing 100191,China
摘要:
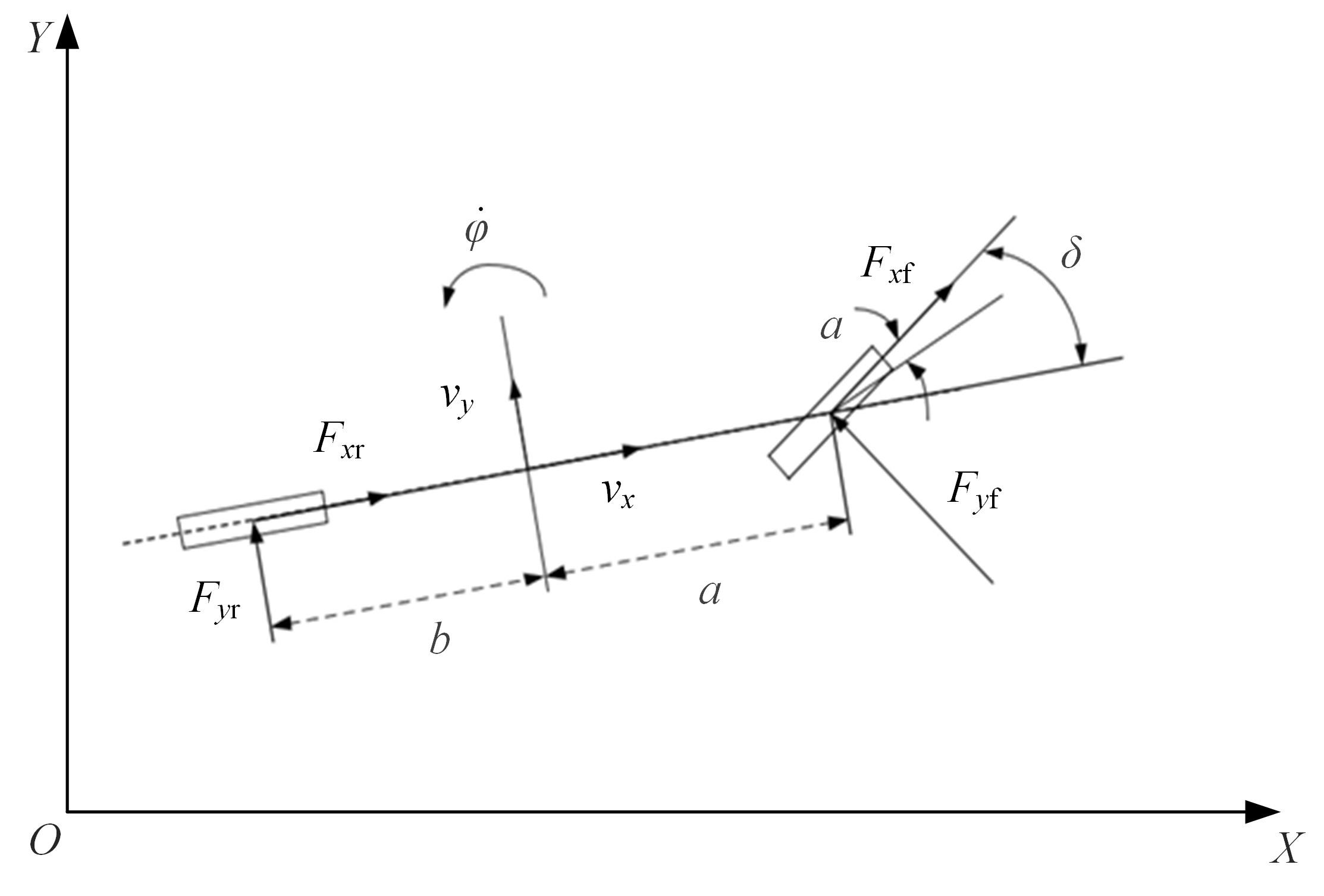
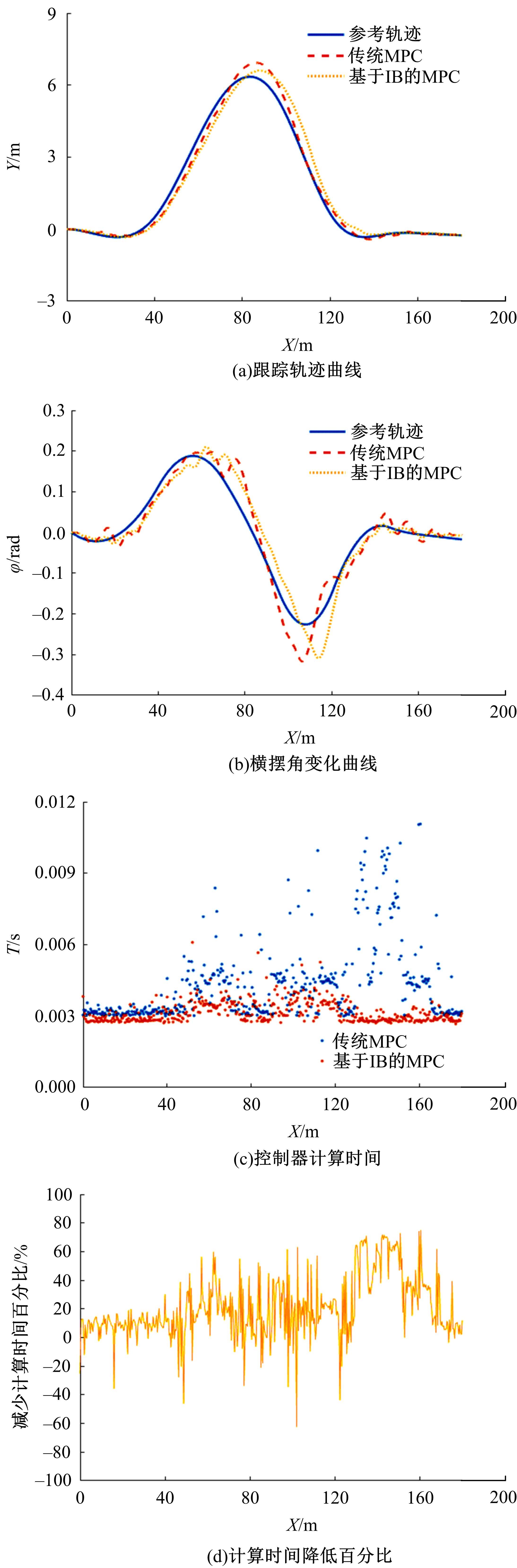
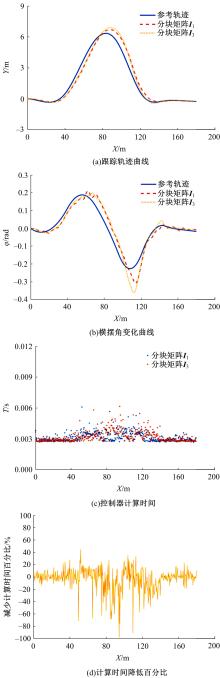
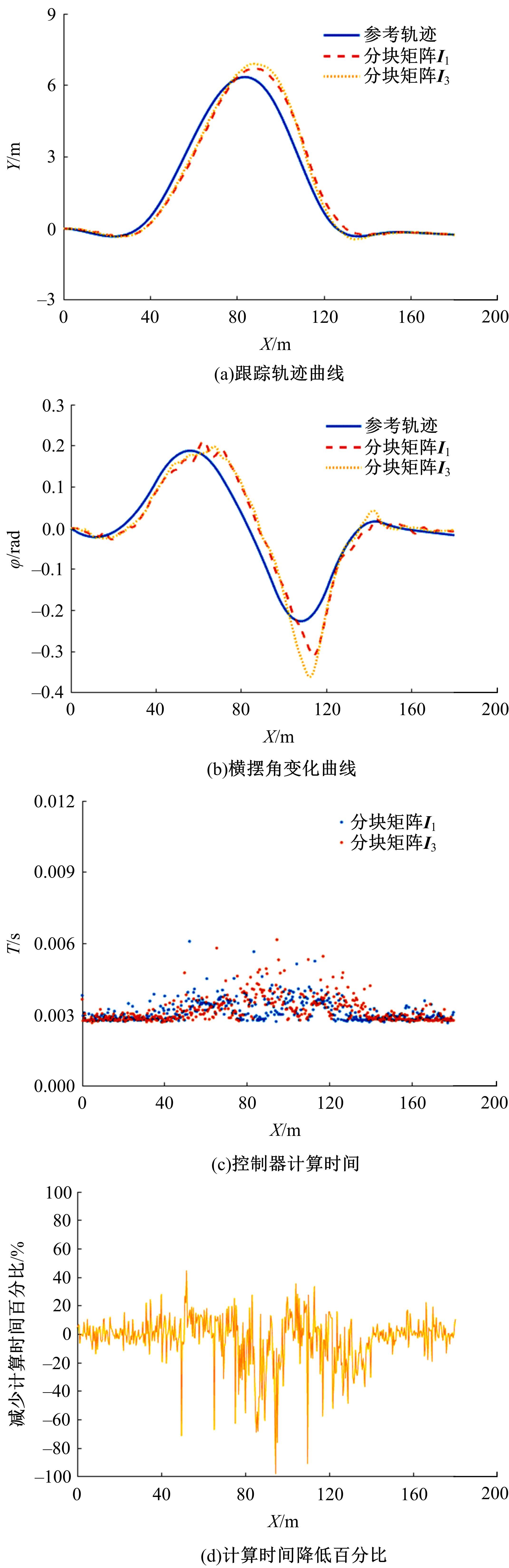
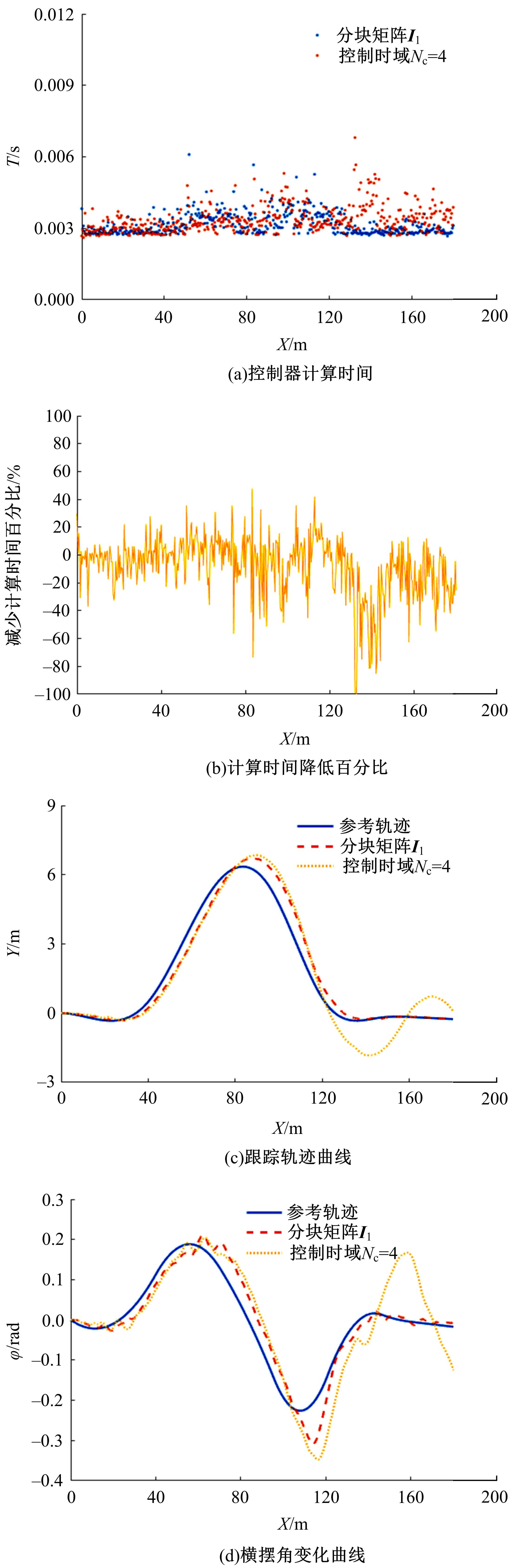
为了解决模型预测控制设计智能车轨迹跟踪控制器存在求解计算时间长、在线实时性低的问题,借助于矩阵分块化策略,提出了一种基于控制时域变步长的模型预测轨迹跟踪控制方法。通过矩阵分块化改变控制时域步长,并融入到二次规划的求解过程中,重构目标函数形式和系统约束条件,以减少求解过程中最优控制序列中待求解变量的数量,降低求解计算时间。在Simulink与Carsim联合仿真平台中,将本文方法与传统模型预测控制方法进行仿真对比分析。结果表明,相比于传统模型预测控制方法,本文方法在保证轨迹跟踪精度的前提下,平均求解计算时间降低了24.39%,最大单次计算时间降低了45.05%,采用“前密后疏”的分块矩阵,其控制器性能优于“平均化”的分块矩阵。
中图分类号:
- U461.6

| 1 | 李克强. 智能电动汽车的感知、决策与控制关键基础问题及对策研究[J]. 科技导报, 2017, 35(14): 85-88. |
| Li Ke-qiang. Key topics and measures for perception, decision-making and control of intelligent electric vehicles[J]. Science and Technology Review, 2017, 35(14): 85-88. | |
| 2 | 赵熙俊, 陈慧岩. 智能车辆路径跟踪横向控制方法的研究[J]. 汽车工程, 2011, 33(5): 382-387. |
| Zhao Xi-jun, Chen Hui-yan. A study on lateral control method for the path tracking of intelligent vehicles[J]. Automotive Engineering,2011, 33(5): 382-387. | |
| 3 | 蔡英凤, 李健, 孙晓强, 等.智能汽车路径跟踪混合控制策略研究[J]. 中国机械工程, 2020, 31(3): 289-298. |
| Cai Ying-feng, Li Jian, Sun Xiao-qiang, et al. Research on hybrid control strategy for intelligent vehicle path tracking[J]. China Mechanical Engineering, 2020, 31(3): 289-298. | |
| 4 | Al-Mayyahi A, Wang W, Birch P. Path tracking of autonomous ground vehicle based on fractional order PID controller optimized by PSO[C]∥IEEE International Symposium on Applied Machine Intelligence & Informatics, Herl'any, Slovakia, 2015: 109-114. |
| 5 | 郭孔辉. 预瞄跟随理论与人-车闭环系统大角度操纵运动仿真[J]. 汽车工程, 1992(1): 1-11. |
| Guo Kong-hui. The theory of preview following and simulation of large angle manipulation motion in a human vehicle closed-loop system[J] Automotive Engineering, 1992 (1): 1-11. | |
| 6 | Wang J, Steiber J, Surampudi B. Autonomous ground vehicle control system for high-speed and safe operation[J]. International Journal of Vehicle Autonomous Systems, 2009, 7(1/2): 18-35. |
| 7 | 赵熙俊, 刘海鸥, 熊光明, 等. 自动转向滑模变结构控制参数选取方法[J]. 北京理工大学学报, 2011, 31(10): 1174-1178. |
| Zhao Xi-jun, Liu Hai-ou, Xiong Guang-ming, et al. Method of parameter selection for automatic steering sliding mode control[J]. Transactions of Beijing Institute of Technology, 2011, 31(10):1174-1178. | |
| 8 | 任玥, 冀杰, 赵颖, 等. 基于最小模型误差估计的智能汽车路径跟踪控制[J]. 汽车工程, 2021, 43(4): 580-587. |
| Ren Yue, Ji Jie, Zhao Ying, et al. Path tracking control of intelligent vehicle based on minimal model error estimation[J]. Automotive Engineering, 2021, 43(4): 580-587. | |
| 9 | 张家旭, 王晨, 赵健. 基于改进人工势场法的汽车弯道超车路径规划与跟踪控制[J]. 汽车工程, 2021, 43(4): 546-552. |
| Zhang Jia-xu, Wang Chen, Zhao Jian. Path planning and tracking control for vehicle overtaking on curve based on modified artificial potential field method[J]. Automotive Engineering, 2021, 43(4): 546-552. | |
| 10 | 贺伊琳, 宋若旸, 马建. 基于强化学习DDPG的智能车辆轨迹跟踪控制[J]. 中国公路学报, 2021, 34(11): 335-348. |
| He Yi-lin, Song Ruo-yang, Ma Jian. Trajectory tracking control of intelligent vehicle based on ddpg method of reinforcement learning[J]. China Journal of Highway and Transport, 2021, 34(11): 335-348. | |
| 11 | 冀杰, 唐志荣, 吴明阳, 等. 面向车道变换的路径规划及模型预测轨迹跟踪[J]. 中国公路学报, 2018, 31(4): 172-179. |
| Ji Jie, Tang Zhi-rong, Wu Ming-yang, et al. Path planning and tracking for lane changing based on model predictive control[J]. China Journal of Highway and Transport, 2018, 31(4): 172-179. | |
| 12 | Song X, Shao Y, Qu Z. A vehicle trajectory tracking method with a time-varying model based on the model predictive control[J]. IEEE Access, 2019, 8: 16573-16583. |
| 13 | 陈龙, 邹凯, 蔡英凤, 等. 基于NMPC的智能汽车纵横向综合轨迹跟踪控制[J]. 汽车工程, 2021, 43(2): 153-161. |
| Chen Long, Zou Kai, Cai Ying-feng, et al. Longitudinal and Lateral Comprehensive Trajectory Tracking Control of Intelligent Vehicles Based on NMPC[J]. Automotive Engineering, 2021, 43(2): 153-161. | |
| 14 | Falcone P, Borrelli F, Asgari J, et al. A model predictive control approach for combined braking and steering in autonomous vehicles[C]∥2007 Mediterranean Conference on Control & Automation, Athens, Greece, 2007: 1-6. |
| 15 | Carvalho A, Gao Y, Gray A, et al. Predictive control of an autonomous ground vehicle using an iterative linearization approach[C]∥International IEEE Conference on Intelligent Transportation Systems, Netherlands, The Hague, Netherlands, 2013: 2335-2340. |
| 16 | 金立生, 谢宪毅, 司法, 等. 考虑驾驶人特性的智能驾驶路径跟踪算法[J]. 汽车工程, 2021, 43(4): 553-561. |
| Jin Li-sheng, Xie Xian-yi, Si Fa, et al. Intelligent driving path tracking algorithm considering driver characteristics[J]. Automotive Engineering, 2021, 43(4): 553-561. | |
| 17 | 许芳, 张君明, 胡云峰, 等. 智能车辆路径跟踪横纵向耦合实时预测控制器[J]. 吉林大学学报: 工学版, 2021, 51(6): 2287-2294. |
| Xu Fang, Zhang Jun-ming, Hu Yun-feng, et al. Lateral and longitudinal coupling real⁃time predictive controller for intelligent vehicle path tracking[J]. Journal of Jilin University (Engineering and Technology Edition), 2021, 51(6): 2287-2294. | |
| 18 | 冷姚, 赵树恩. 智能车辆横向轨迹跟踪的显式模型预测控制方法[J]. 系统仿真学报, 2021, 33(5): 1177-1187. |
| Leng Yao, Zhao Shu-en. Explicit model predictive control for intelligent vehicle lateral trajectory tracking[J]. Journal of System Simulation, 2021, 33(5): 1177-1187. | |
| 19 | Shekhar R C, Manzie C. Optimal move blocking strategies for model predictive control[J]. Automatica, 2015, 61: 27-34. |
| 20 | 许芳, 郭中一, 于树友, 等. 四轮驱动电动汽车稳定性预测控制器快速实现[J]. 控制理论与应用, 2022, 39(5): 777-787. |
| Xu Fang, Guo Zhong-yi, Yu Shu-you, et al. Fast implementation of stability prediction controller for four-wheel drive electric vehicle[J]. Control Theory and Applications, 2022, 39(5): 777-787. | |
| 21 | Gim G, Nikravesh P E. An Analytical model of pneumatic tyres for vehicle dynamics simulations. part 1: pure slips[J]. International Journal of Vehicle Design, 1990, 11(6): 589-618. |
| 22 | Gim G, Nikravesh P E. An analytical model of pneumatic tyres for vehicle dynamic simulations. part 2: comprehensive slips[J]. International Journal of Vehicle Design, 2014, 12(1): 19-39. |
| 23 | Ricker N L. Use of quadratic programming for constrained internal model control[J]. Industrial & Engineering Chemistry Process Design and Development, 1985, 24(4): 925-936. |
| 24 | Schwickart T, Voos H, Darouach M, et al. A flexible move blocking strategy to speed up model-predictive control while retaining a high tracking performance[J/OL]. [2022-05-02]. |
| 25 | Li D, Xi Y, Lin Z. An improved design of aggregation-based model predictive control[J]. Systems & Control Letters, 2013, 62(11): 1082-1089. |
| 26 | Qin S J, Badgwell T A. A survey of industrial model predictive control technology[J]. Control Engineering practice, 2003, 11(7): 733-764. |
| 27 | Cagienard R, Grieder P, Kerrigan E C, et al. Move blocking strategies in receding horizon control[J]. Journal of Process Control, 2007, 17(6): 563-570. |
| 28 | Valencia-palomo G, Pelegrinis M, Rossiter J A, et al. A move-blocking strategy to improve tracking in predictive control[C]∥Proceedings of the 2010 American Control Conference, Baltimore, USA, 2010: 6293-6298. |
| [1] | 高镇海,蔡荣贵,孙天骏,于桐,赵浩源,班浩. 人机共驾下的驾驶行为数据滤波方法[J]. 吉林大学学报(工学版), 2024, 54(3): 589-599. |
| [2] | 赵靖华,张雨彤,曹派,王忠恕,李小平,孙亚南,解方喜. 压缩天然气发动机增程式电动汽车能量管理优化[J]. 吉林大学学报(工学版), 2024, 54(3): 600-609. |
| [3] | 李文航,倪涛,赵丁选,邓英杰,师小波. 基于模型预测反馈技术的救援车辆液压悬挂系统控制方法[J]. 吉林大学学报(工学版), 2024, 54(3): 610-619. |
| [4] | 王毅刚,王玉鹏,张昊,赵思安. 高速列车转向架区域气动噪声源识别与分析[J]. 吉林大学学报(工学版), 2024, 54(2): 346-355. |
| [5] | 聂建军,侯军凯,解晓琳,鄢鸿桢. 新型巡检机器人移动底盘设计及越障性能分析[J]. 吉林大学学报(工学版), 2024, 54(2): 356-364. |
| [6] | 胡宏宇,张慧珺,姚荣涵,陈国迎,高菲. L3级自动驾驶接管过程驾驶员情景意识研究[J]. 吉林大学学报(工学版), 2024, 54(2): 410-418. |
| [7] | 江和耀,王永海,吴幼冬,王萍. 四轮毂驱动电动车辆横向稳定与侧倾预防协同控制策略[J]. 吉林大学学报(工学版), 2024, 54(2): 540-549. |
| [8] | 邓小林,杨馥模,覃善甘. 新型仿竹六边形梯度层级多胞管耐撞性对比分析[J]. 吉林大学学报(工学版), 2024, 54(2): 333-345. |
| [9] | 吴骁,史文库,郭年程,赵燕燕,陈志勇,李鑫鹏,孙卓,刘健. 基于Ease off的准双曲面齿轮多目标优化[J]. 吉林大学学报(工学版), 2024, 54(1): 76-85. |
| [10] | 王铁,李旭东,田程,赵宏伟. 基于多轴载荷投影构建轮辋双轴疲劳损伤模型[J]. 吉林大学学报(工学版), 2024, 54(1): 99-104. |
| [11] | 李旭东,王新宇,田程,张新峰,牛治慧,赵志强. 基于用户关联的车辆耐久性载荷谱编制[J]. 吉林大学学报(工学版), 2024, 54(1): 66-75. |
| [12] | 陈兆玮,蒲前华. 弹性车轮对大跨斜拉桥车桥耦合振动的抑制特性[J]. 吉林大学学报(工学版), 2023, 53(9): 2519-2532. |
| [13] | 刘平义,李晓婷,高偌霖,李海涛,魏文军,王亚. 车辆侧倾驱动机构设计与试验[J]. 吉林大学学报(工学版), 2023, 53(8): 2185-2192. |
| [14] | 张树培,夏明悦,张玮,陈钊,陈义祥. 考虑非线性刚度的间隙球铰碰撞动力学建模与仿真[J]. 吉林大学学报(工学版), 2023, 53(8): 2227-2235. |
| [15] | 陈辉,邵亚军. 基于惯性基准多传感器耦合的路面谱测量方法[J]. 吉林大学学报(工学版), 2023, 53(8): 2254-2262. |
|
||