吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (1): 84-92.doi: 10.13229/j.cnki.jdxbgxb.20230266
直驱阀控液压振动平台改进自抗扰控制
谭草( ),任浩鑫,葛文庆(),宋亚东,陆佳瑜
),任浩鑫,葛文庆(),宋亚东,陆佳瑜
- 山东理工大学 交通与车辆工程学院,山东 淄博,255000
Improved active disturbance rejection control for hydraulic vibration stages based on the direct-drive valve
Cao TAN(),Hao-xin REN,Wen-qing GE(),Ya-dong SONG,Jia-yu LU
- School of Transportation and Vehicle Engineering,Shandong University of Technology,Zibo 255000,China
摘要:
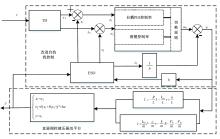
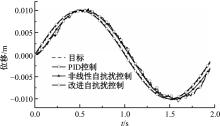
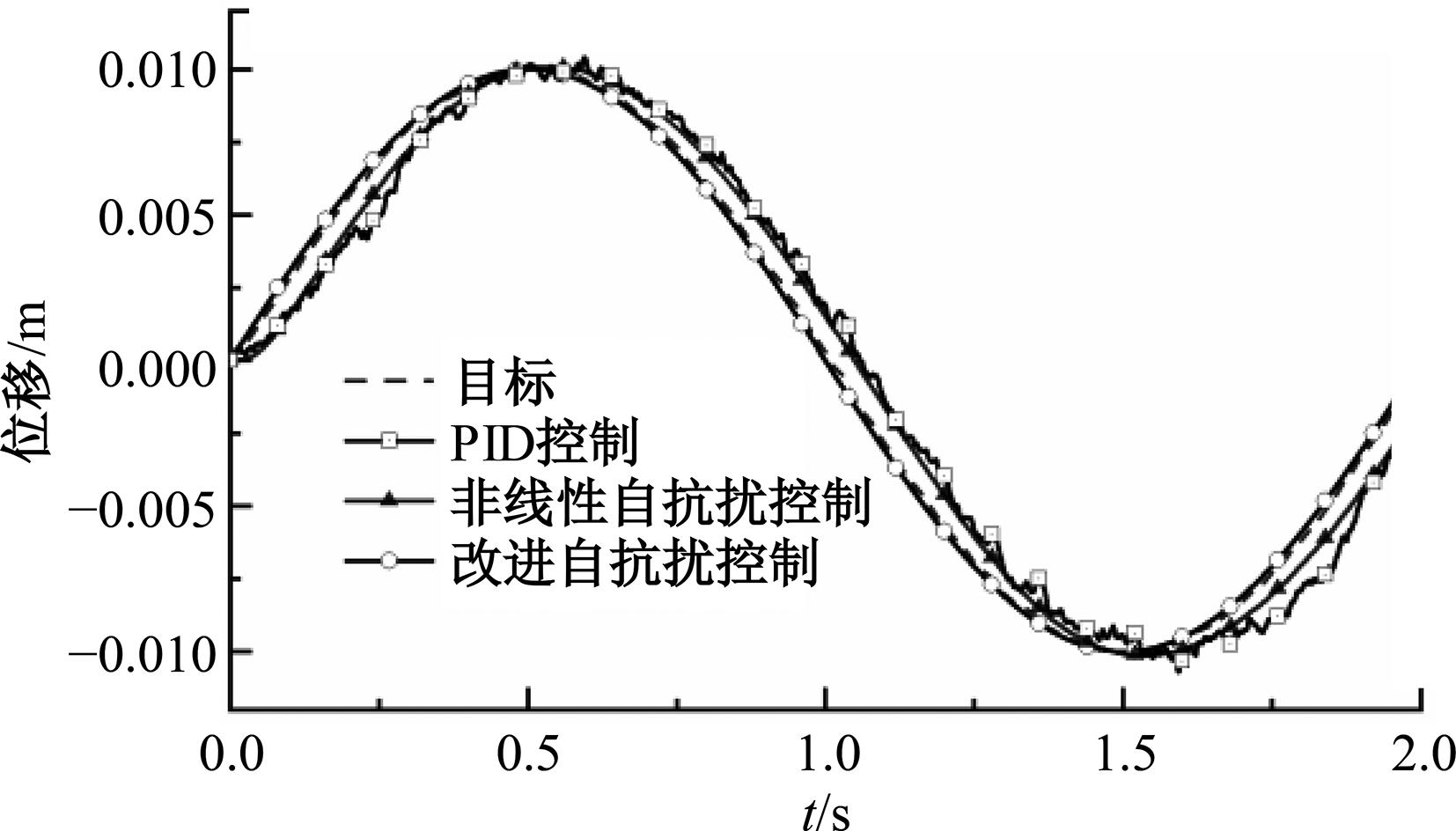
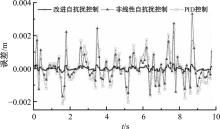
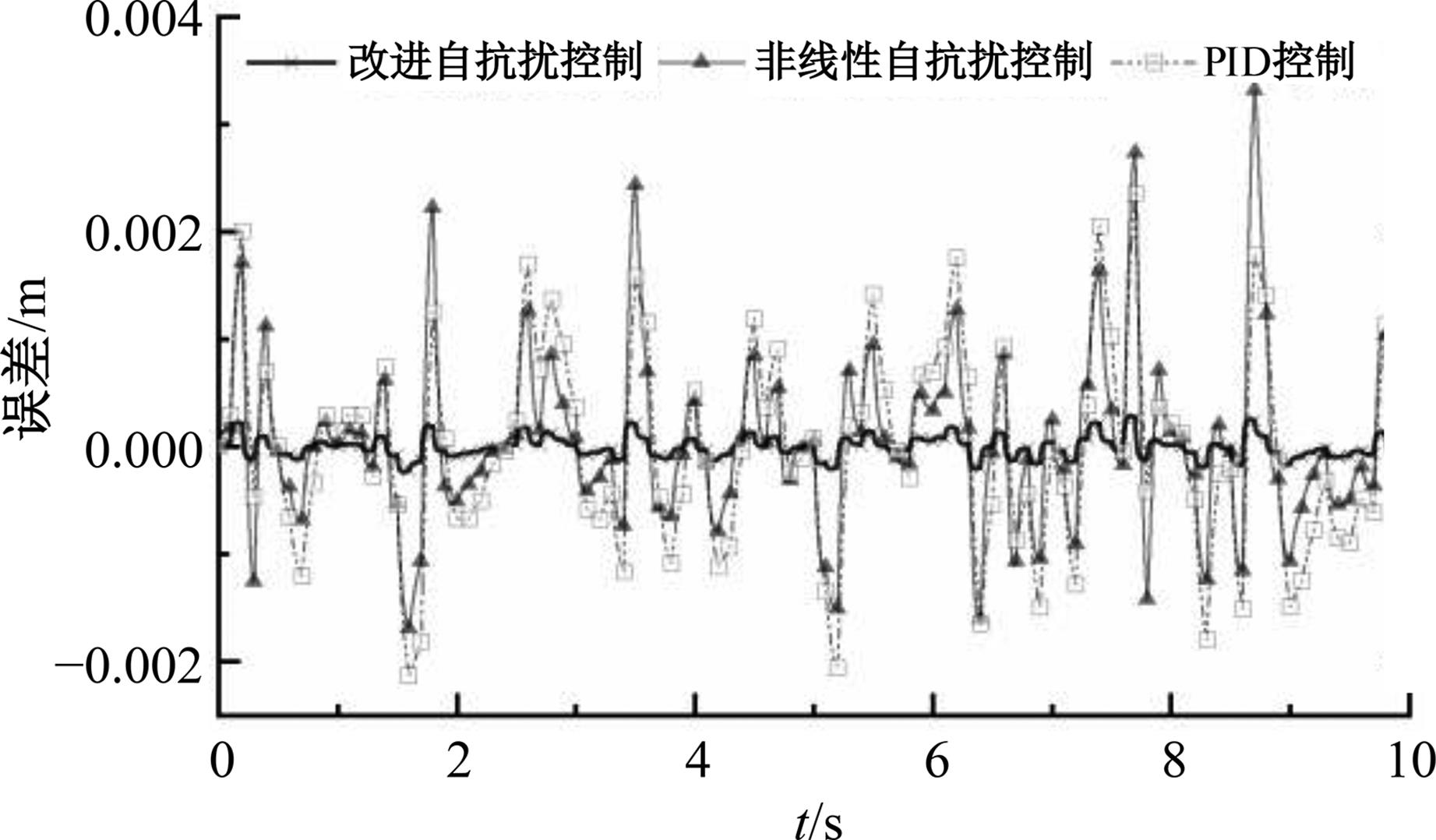
针对参数摄动下液压振动平台性能恶化、自抗扰控制器响应速度以及抗干扰能力难以兼得的问题,提出了一种基于自耦PID控制律与滑模控制律之间切换的改进自抗扰控制方法。在误差较大时设计基于自适应速度因子的自耦PID控制律,快速减小误差;在小误差的响应后期根据控制律在切换点输出应相等从而控制输出避免突变的原则进行控制律切换,将自耦PID控制律切换为滑模控制律,利用滑模函数不依赖于系统模型的特殊性质提高系统对参数摄动的鲁棒性,同时避免自适应速度因子在小误差时值较大而引起超调的问题。通过李雅普诺夫直接法证明了该算法稳定,并进行了试验验证。结果表明:提出的改进自抗扰控制方法有效提高了直驱阀控液压振动平台的响应速度及抗干扰能力。
中图分类号:
- U467.5
| 1 | 汪飞雪, 姚静, 胡福泰, 等.锻造液压机振动特性机-液联合仿真[J]. 中国机械工程, 2020, 31(10): 1175-1182, 1189. |
| Wang Fei-xue, Yao Jing, Hu Fu-tai, et al. Machine hydraulic joint simulation of vibration characteristics of forging hydraulic presses[J]. China Mechanical Engineering, 2020, 31 (10): 1175-1182, 1189. | |
| 2 | 李波, 黎德祥, 葛文庆, 等. 基于直驱阀的快速响应线控制动系统液压力精确控制[J]. 中国公路学报, 2021, 34(9): 121-132. |
| Li Bo, Li De-xiang, Ge Wen-qing, et al. Accurate control of hydraulic pressure in a direct drive valve based fast response line control actuator system[J]. Journal of China Highway, 2021, 34 (9): 121-132. | |
| 3 | Feng H, Ma W, Yin C, et al. Trajectory control of electro-hydraulic position servo system using improved PSO-PID controller[J]. Automation in Construction, 2021, 127(Sup.C): No.103722. |
| 4 | Wrat G, Bhola M, Ranjan P, et al. Energy saving and Fuzzy-PID position control of electro-hydraulic system by leakage compensation through proportional flow control valve[J]. ISA Transactions, 2020, 101: 269-280. |
| 5 | 赵岩, 周秦源, 邵念锋, 等. 基于RBF神经网络模糊PID控制的电液伺服系统 [J]. 机电工程, 2022, 39(2): 244-249. |
| Zhao Yan, Zhou Qin-yuan, Shao Nian-feng, et al. Electrohydraulic servo system based on RBF neural network fuzzy PID control[J]. Mechanical and Electrical Engineering, 2022,39 (2): 244-249. | |
| 6 | Xu Z, Liu Q, Yao J. Adaptive prescribed performance control for hydraulic system with disturbance compensation[J]. International Journal of Adaptive Control and Signal Processing, 2021, 35(8): 1544-1561. |
| 7 | 聂守成, 钱林方, 陈志群, 等. 基于干扰观测器的弹丸协调器电液伺服系统自适应滑模控制 [J]. 兵工学报, 2020, 41(9): 1745-1751. |
| Nie Shou-cheng, Qian Lin-fang, Chen Zhi-qun, et al. Adaptive sliding mode control for electrohydraulic servo system of projectile coordinator based on disturbance observer[J]. Journal of Military Engineering, 2020, 41(9): 1745-1751. | |
| 8 | 李玉昆, 李永泉, 万一心, 等.液压伺服驱动3-UPS/S并联稳定平台振动响应分析 [J]. 中国机械工程, 2019, 30(4): 423-430. |
| Li Yu-kun, Li Yong-quan, Wan Yi-xin, et al. Vibration response analysis of a hydraulic servo driven 3-UPS/S parallel stabilized platform[J]. China Mechanical Engineering, 2019, 30(4): 423-430. | |
| 9 | Mintsa H A, Venugopal R, Kenne J P, et al. Feedback linearization-based position control of an electrohydraulic servo system with supply pressure uncertainty[J]. IEEE Transactions on Control Systems Technology, 2012, 20(4): 1092-1099. |
| 10 | Du H, Ding K, Shi J, et al. High-gain observer-based pump/valve combined control for heavy vehicle electro-hydraulic servo steering system[J]. Mechatronics, 2022, 85: No.102815. |
| 11 | 张震阳, 汪成文, 郭新平, 等. 基于ESO的电液位置伺服系统反步滑模控制 [J]. 北京航空航天大学学报, 2022, 48(6): 1082-1090. |
| Zhang Zhen-yang, Wang Cheng-wen, Guo Xin-ping, et al. ESO based backstepping sliding mode control for electro-hydraulic position servo systems [J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48 (6): 1082-1090. | |
| 12 | 李骥鹏, 孙春耕, 段志杰, 等. 电液力伺服系统的反馈线性化滑模控制研究 [J]. 机电工程, 2023, 40(6): 860-866. |
| Li Ji-peng, Sun Chun-geng, Duan Zhi-jie, et al. Research on feedback linearization sliding mode control for electrohydraulic servo systems[J]. Mechanical and Electrical Engineering, 2023, 40(6): 860-866. | |
| 13 | Gao B, Shao J, Yang X. A compound control strategy combining velocity compensation with ADRC of electro-hydraulic position servo control system[J]. ISA Tranactions, 2014, 53(6): 1910-1918. |
| 14 | 杨文明, 白建朋, 黄莹, 等. 基于BP改进PID的掘进机闭环回路跟随误差联合仿真[J]. 中国工程机械学报, 2022, 20(6): 493-497. |
| Yang Wen-ming, Bai Jian-peng, Huang Ying, et al. Joint simulation of tracking error in closed loop of roadheader based on BP improved PID[J]. Journal of China Construction Machinery, 2022, 20(6): 493-497. | |
| 15 | 王立新, 赵丁选, 刘福才, 等. 基于死区补偿的电液位置伺服系统自抗扰控制[J]. 中国机械工程, 2021, 32(12): 1432-1442. |
| Wang Li-xin, Zhao Ding-xuan, Liu Fu-cai, et al. Auto-disturbance rejection control for electro-hydraulic position servo systems based on dead zone compensation[J]. China Mechanical Engineering, 2021, 32 (12): 1432-1442. | |
| 16 | 王立新, 赵丁选, 刘福才, 等. 一类轻载电液位置伺服系统线性自抗扰控制[J]. 控制理论与应用, 2021, 38(4): 503-515. |
| Wang Li-xin, Zhao Ding-xuan, Liu Fu-cai, et al. Linear active disturbance rejection control for a class of lightly loaded electrohydraulic position servo systems[J]. Control Theory and Application, 2021, 38(4): 503-515. | |
| 17 | 司国雷, 神英淇, 王嘉磊, 等. 电液位置伺服系统自抗扰控制研究 [J]. 液压与气动, 2020(12): 14-21. |
| Si Guo-lei, Shen Ying-qi, Wang Jia-lei, et al. Research on active disturbance rejection control for electrohydraulic position servo system[J]. Hydraulic and Pneumatic, 2020(12): 14-21. | |
| 18 | 付永领, 陈辉, 刘和松, 等. 基于自抗扰控制的导弹电液舵机系统研究 [J]. 宇航学报, 2010, 31(4): 1051-1055. |
| Fu Yong-ling, Chen Hui, Liu He-song, et al. Research on missile electrohydraulic actuator system based on active disturbance rejection control [J]. Journal of Astronautics, 2010, 31(4): 1051-1055. | |
| 19 | 范新宇, 王鹏, 殷杰, 等. 新型复合式电磁直线执行器的多模式协调控制[J]. 中国机械工程, 2023, 34(3): 292-299. |
| Fan Xin-yu, Wang Peng, Yin Jie, et al. Multimode coordinated control of a new composite electromagnetic linear actuator[J]. China Mechanical Engineering, 2023,34 (3): 292-299. | |
| 20 | 谭草, 黎德祥, 葛文庆, 等. 改进LuGre模型的电磁直线执行器自适应鲁棒控制[J]. 电机与控制学报, 2022, 26(10): 130-138. |
| Tan Cao, Li De-xiang, Ge Wen-qing, et al. Adaptive robust control for electromagnetic linear actuator with improved LuGre model[J]. Electric Machines and Control, 2022, 26 (10): 130-138. | |
| 21 | Lu Y, Tan C, Ge W, et al. Adaptive disturbance observer-based improved super-twisting sliding mode control for electromagnetic direct-drive pump[J]. Smart Materials and Stuctures,2022, 32(1): No. 017001. |
| 22 | 谭草, 鲁应涛, 葛文庆, 等. 直驱式永磁直线电机深度模糊滑模-自抗扰控制[J]. 西安交通大学学报, 2023, 57(1): 185-194. |
| Tan Cao, Lu Ying-tao, Ge Wen-qing, et al. Deep fuzzy sliding mode active disturbance rejection control for direct drive permanent magnet linear motors[J]. Journal of Xi'an Jiaotong University, 2023,57(1): 185-194. | |
| 23 | Chen G, Jiang Y, Tang Y, et al. Revised adaptive active disturbance rejection sliding mode control strategy for vertical stability of active hydro-pneumatic suspension[J]. ISA Transactions, 2023, 132: 490-507. |
| 24 | 曾喆昭, 陈泽宇.论PID与自耦PID控制理论方法 [J]. 控制理论与应用, 2020, 37(12): 2654-2662. |
| Zeng Zhe-zhao, Chen Ze-yu. On PID and self coupling PID control theory and method[J]. Control Theory and Application, 2020, 37(12): 2654-2662. | |
| 25 | 杨旭, 曹立佳, 刘洋. 基于自耦PID控制的四旋翼无人机姿态控制 [J]. 兵器装备工程学报, 2021, 42(10): 170-175. |
| Yang Xu, Cao Li-jia, Liu Yang. Attitude control of a four rotor unmanned aerial vehicle based on self coupled PID control[J]. Journal of Weapon Equipment Engineering, 2021, 42 (10): 170-175. | |
| 26 | 郭新平, 汪成文, 刘华, 等. 基于扩张状态观测器的泵控电液伺服系统滑模控制 [J]. 北京航空航天大学学报, 2020, 46(6): 1159-1168. |
| Guo Xin-ping, Wang Cheng-wen, Liu Hua, et al. Sliding mode control for pump controlled electrohydraulic servo systems based on extended state observer[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(6): 1159-1168. |
| [1] | 王军年,曹宇靖,罗智仁,李凯旋,赵文伯,孟盈邑. 基于双目视觉的道路水深在线检测算法[J]. 吉林大学学报(工学版), 2025, 55(1): 175-184. |
| [2] | 李寿涛,杨路,屈如意,孙鹏鹏,于丁力. 基于模型预测控制的滑移率控制方法[J]. 吉林大学学报(工学版), 2024, 54(9): 2687-2696. |
| [3] | 吴量,顾义凡,邢彪,马芳武,倪利伟,贾微微. 基于线性二次型调节器的四轮转向与分布式集成控制方法[J]. 吉林大学学报(工学版), 2024, 54(9): 2414-2422. |
| [4] | 王玉海,李晓之,李兴坤. 面向高速工况的混合动力卡车预见性节能算法[J]. 吉林大学学报(工学版), 2024, 54(8): 2121-2129. |
| [5] | 常胜,刘宏飞,邹乃威. 汽车变曲率路径循迹H∞回路成形鲁棒控制[J]. 吉林大学学报(工学版), 2024, 54(8): 2141-2148. |
| [6] | 刘建泽,柳江,李敏,章新杰. 基于最小二乘的车速解耦路面辨识方法[J]. 吉林大学学报(工学版), 2024, 54(7): 1821-1830. |
| [7] | 谢宪毅,张明君,金立生,周彬,胡涛,白宇飞. 考虑舒适度的智能汽车人工蜂群轨迹规划方法[J]. 吉林大学学报(工学版), 2024, 54(6): 1570-1581. |
| [8] | 刘从臻,陈高,刘洪柱,马强,徐成伟,孟辉,王国林. 湿滑路面轮胎接地力学特性模型[J]. 吉林大学学报(工学版), 2024, 54(6): 1501-1511. |
| [9] | 黄玲,崔躜,游峰,洪佩鑫,钟浩川,曾译萱. 适用于多车交互场景的车辆轨迹预测模型[J]. 吉林大学学报(工学版), 2024, 54(5): 1188-1195. |
| [10] | 郭洪艳,王连冰,赵旭,戴启坤. 考虑侧向运动的整车质量与道路坡度估计[J]. 吉林大学学报(工学版), 2024, 54(5): 1175-1187. |
| [11] | 陆玉凯,袁帅科,熊树生,朱绍鹏,张宁. 汽车漆面缺陷高精度检测系统[J]. 吉林大学学报(工学版), 2024, 54(5): 1205-1213. |
| [12] | 汪少华,张启睿,施德华,殷春芳,李春. 双行星排式混合动力传动系统非线性振动响应特性分析[J]. 吉林大学学报(工学版), 2024, 54(4): 890-901. |
| [13] | 高镇海,蔡荣贵,孙天骏,于桐,赵浩源,班浩. 人机共驾下的驾驶行为数据滤波方法[J]. 吉林大学学报(工学版), 2024, 54(3): 589-599. |
| [14] | 谢宪毅,王禹涵,金立生,赵鑫,郭柏苍,廖亚萍,周彬,李克强. 基于改变控制时域时间步长的智能车轨迹跟踪控制[J]. 吉林大学学报(工学版), 2024, 54(3): 620-630. |
| [15] | 邓小林,杨馥模,覃善甘. 新型仿竹六边形梯度层级多胞管耐撞性对比分析[J]. 吉林大学学报(工学版), 2024, 54(2): 333-345. |
|
||