吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (2): 456-467.doi: 10.13229/j.cnki.jdxbgxb.20240874
• 车辆工程·机械工程 • 上一篇
自动驾驶汽车连续测试场景复杂度评估方法
朱冰1( ),范天昕1,赵文博2,李伟男3,张培兴1()
),范天昕1,赵文博2,李伟男3,张培兴1()
- 1.吉林大学 汽车底盘集成与仿生全国重点实验室,长春 130022
2.国汽(北京)智能网联汽车研究院有限公司,北京 100176
3.中国第一汽车集团股份有限公司研发总院,长春 130011
Continuous test scenario complexity evaluation method for automated driving vehicles
Bing ZHU1(),Tian-xin FAN1,Wen-bo ZHAO2,Wei-nan LI3,Pei-xing ZHANG1()
- 1.National Key Laboratory of Automotive Chassis Integration and Bionics,Jilin University,Changchun 130022,China
2.China Intelligent and Connected Vehicles (Beijing) Research Institute Co. ,Ltd. ,Beijing 100176,China
3.China First Automobile Corporation R&D Center,Changchun 130011,China
摘要:
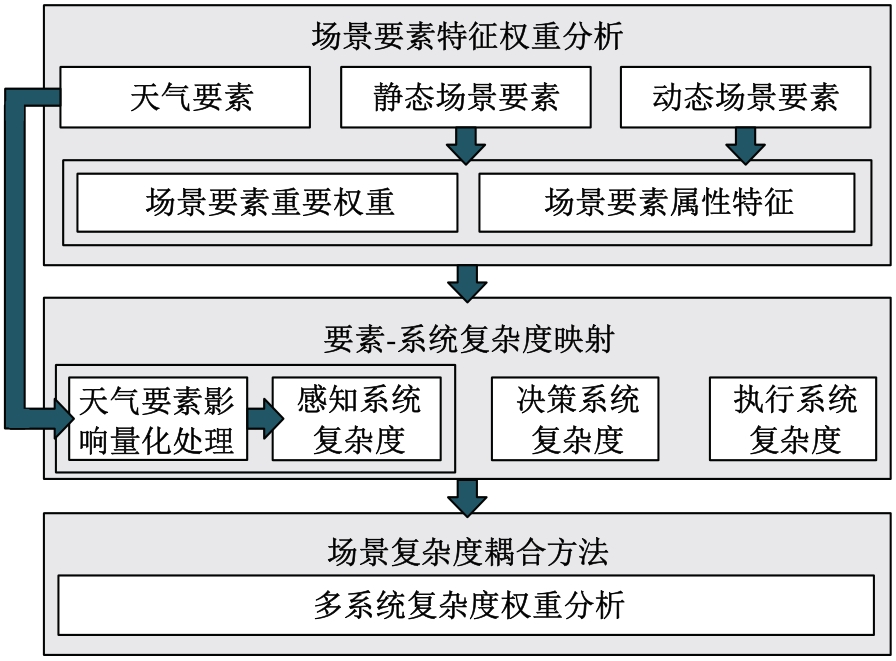
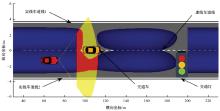
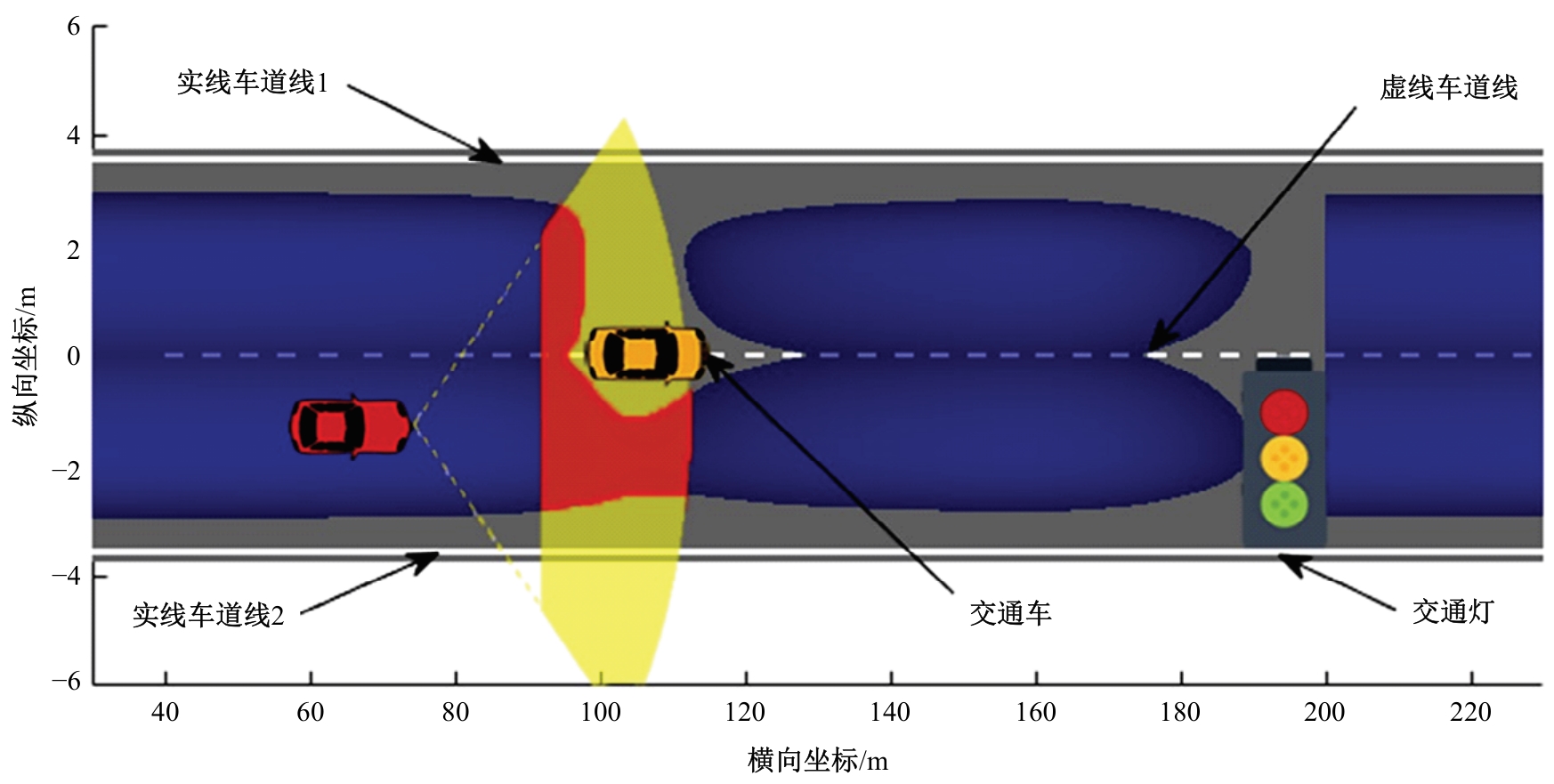
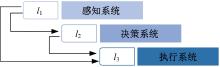
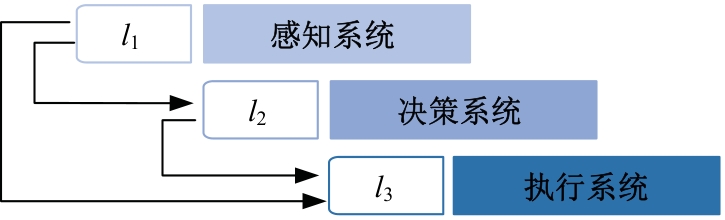
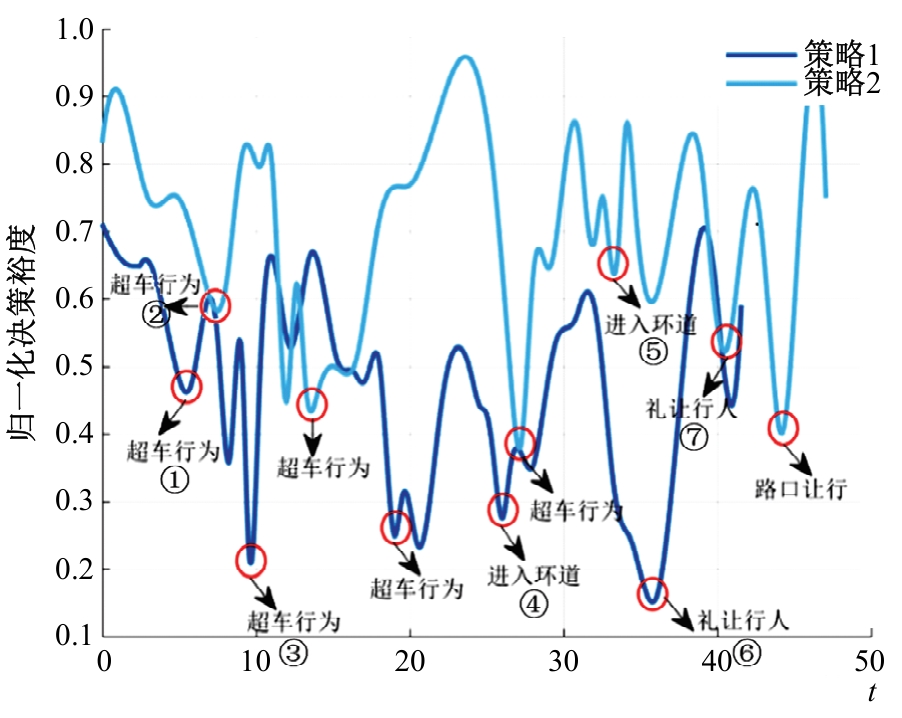
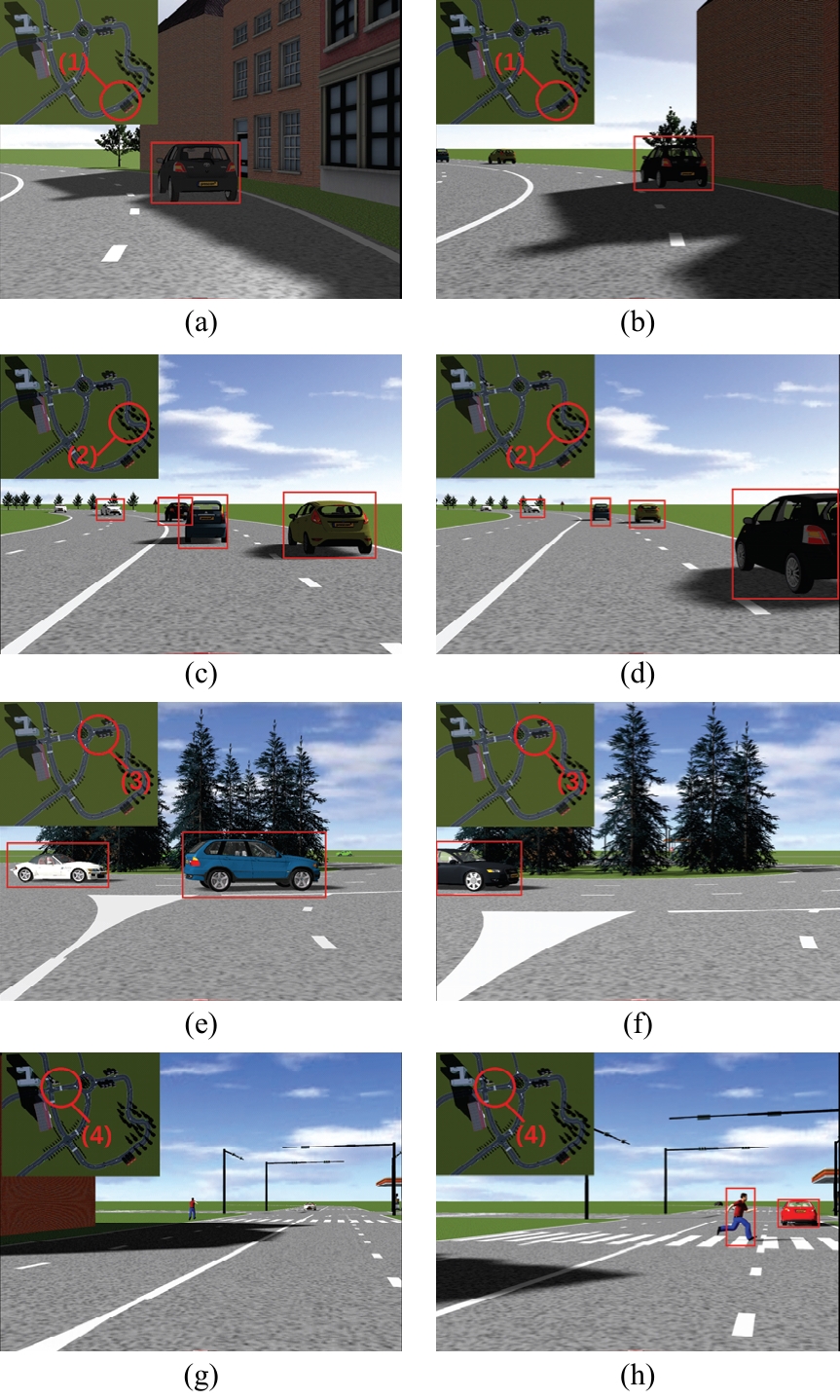
连续测试场景是自动驾驶汽车测试体系的重要内容,其测试公平性一直受到较多的争议。为此,本文提出一种自动驾驶汽车连续测试场景复杂度评估方法,以期解决测试场景公平性难题。基于六层场景模型建立场景要素重要性评估体系;分析场景要素与感知、决策、执行系统间的复杂度映射关系,建立自动驾驶系统层级的场景复杂度量化评价方法;建立系统影响传递权重系数,实现场景复杂度综合计算。搭建仿真交通环境对两种自动驾驶系统行驶过程复杂度进行计算,两车场景复杂度对比结果分别为1和0.765,与测试过程被测算法遭遇的场景难度趋势一致,证明了本文方法的有效性。
中图分类号:
- U461



| 1 | 赵祥模教授国家重点研发计划( 2021 YFB2501200 )团队.自动驾驶测试与评价技术研究进展[J].交通运输工程学报, 2023, 23(6): 10-77. |
| Zhao Xiang-mo's team supported by the National Key Research and Development Program of China( 2021 YFB2501200). Research progress in testing and evaluation technologies for autonomous driving[J]. Journal of Traffic and Transportation Engineering, 2023, 23(6): 10-77. | |
| 2 | 朱冰, 张培兴, 赵健, 等. 基于场景的自动驾驶汽车虚拟测试研究进展[J].中国公路学报, 2019, 32(6): 1-19. |
| Zhu Bing, Zhang Pei-xing, Zhao Jian, et al. Review of scenario-based virtual validation methods for automated vehicles[J]. China Journal of Highway and Transport, 2019, 32(6): 1-19. | |
| 3 | Shadrin S S, Ivanov A M, Makarova D A. Methods of parameter verification and scenario generation during virtual testing of highly automated and autonomous vehicles[C]∥Intelligent Technologies and Electronic Devices in Vehicle and Road Transport, New York, USA, 2022: 1-6. |
| 4 | Amirul I A B, Mohd A A, Mohd F M S. Synthesis of autonomous vehicle guideline for public road-testing sustainability[J]. Sustainability, 2022, 14(3): 1-18. |
| 5 | Dixit V V, Chand S, Nair D J. Autonomous vehicles: disengagements, accidents and reaction times[J]. Plos One, 2016, 11(12): 1-14. |
| 6 | 王荣, 孙亚夫, 宋娟. 自动驾驶汽车道路测试场景评价方法与试验验证[J].汽车工程, 2021, 43(4): 620-628. |
| Wang Rong, Sun Ya-fu, Song Juan. Evaluation method and test verification of road test scenes for autonomous vehicles[J]. Automotive Engineering, 2021, 43(4): 620-628. | |
| 7 | 李江坤, 邓伟文, 任秉韬, 等. 一种智能汽车测试场景复杂度的评估方法[C]∥中国汽车工程学会年会论文集, 北京, 中国, 2020: 106-113. |
| 8 | 董汉, 舒伟, 陈超, 等. 危险驾驶工况场景的复杂度评估方法研究[J].汽车工程, 2020, 42(6): 808-814. |
| Dong Han, Shu Wei, Chen Chao, et al. Research on complexity evaluation method of dangerous driving scenes[J]. Automotive Engineering, 2020, 42(6): 808-814. | |
| 9 | Liu Y K, Hansen J H L. Towards complexity level classification of driving scenarios using environmental information[C]∥IEEE Intelligent Transportation Systems Conference, New York, USA, 2019: 810-819. |
| 10 | Kim I Y, Kang D Y, Jeong H. Method of evaluating multiple scenarios in a single simulation run for automated vehicle assessment[J]. Sensors, 2023, 23(19): 1-19. |
| 11 | Lu C R, Dong J, Houchin A. Incorporating the standstill distance and time headway distributions into freeway car-following models and an application to estimating freeway travel time reliability[J]. Journal of Intelligent Transportation Systems, 2021, 25(1): 21-40. |
| 12 | Winner H, Lemmer K, Form T, et al. Pegasus- first steps for the safe introduction of automated driving[C]∥Road Vehicle Automation 5, Heidelberg, Germany, 2019: 185-195. |
| 13 | Xu T F, Zhao P. Image motion-blur-based object's speed measurement using an interlaced scan image[J]. Measurement Science and Technology, 2010, 21(7): 1-10. |
| 14 | 王战古. 不良天气条件下车辆检测方法研究[D]. 长春:吉林大学汽车工程学院, 2022. |
| Wang Zhan-gu. Research on vehicle detection method under adverse weather conditions[D]. Changchun: College of Automotive Engineering, Jilin University, 2022. | |
| 15 | 李鑫. 面向汽车智能驾驶的毫米波雷达建模与仿真研究[D]. 长春: 吉林大学汽车工程学院, 2020. |
| Li Xin. Research on modeling and simulation of millimeter wave radar for vehicle intelligent driving[D]. Changchun: College of Automotive Engineering, Jilin University, 2020. | |
| 16 | 赵轩. 基于路侧激光雷达的交通目标感知方法与实现[D].西安:西安工业大学电子信息工程学院, 2023. |
| Zhao Xuan.Roadside lidar-based traffic target sensing method and implementation[D]. Xi'an: College of Electronic Information Engineering, Xi'an Technological University, 2023. | |
| 17 | 葛平淑, 郭烈, 齐国栋, 等. 变光照环境下车道标识线的识别方法[J].激光与光电子学进展, 2020, 57(16): 1-6. |
| Ge Ping-shu, Guo Lie, Qi Guo-dong, et al. Lane marker line identification method in variable light environment[J]. Laser and Optoelectronics Progress, 2020, 57(16): 1-6. | |
| 18 | 蒋渊德, 孙朋朋, 秦孔建, 等. 雨雪天气对自动驾驶视觉图像质量的影响[J].中国公路学报, 2022, 35(3): 307-316. |
| Jiang Yuan-de, Sun Peng-peng, Qin Kong-jian, et al. Influence of rain and snow on autonomous vehicles' camera[J].China Journal of Highway and Transport, 2022, 35(3): 307-316. | |
| 19 | Elizabeth E, Andrew B, Bani H N, et al. Experimental investigation of the effects of fog on optical camera-based VLC for a vehicular environment[C]∥15th International Conference on Telecommunications, New York, USA, 2019: 1-5. |
| 20 | Zang S Z, Ding M, Smith D, et al. The impact of adverse weather conditions on autonomous vehicles: how rain, snow, fog, and hail affect the performance of a self-driving car[J].IEEE Vehicular Technology Magazine, 2019, 14(2): 103-111. |
| 21 | 白雪松, 邓伟文, 任秉韬, 等. 一种自动驾驶仿真场景要素的提取方法[J].汽车工程, 2021, 43(7): 1031-1036. |
| Bai Xue-song, Deng Wei-wen, Ren Bing-tao, et al. An extraction method of scenario elements for autonomous driving simulation[J].Automotive Engineering, 2021, 43(7): 1031-1036. | |
| 22 | Keisuke Y, Naoki S, Ryo Y, et al. Automated driving recognition technologies for adverse weather conditions[J].IATSS Research, 2019, 43: 253-262. |
| 23 | 孙朋朋, 赵祥模, 蒋渊德, 等. 降雨条件对车载激光雷达性能影响的试验研究[J].中国公路学报, 2022, 35(11): 318-328. |
| Sun Peng-peng, Zhao Xiang-mo, Jiang Yuan-de, et al. Experimental study of influence of rain on performance of automotive lidar[J]. China Journal of Highway and Transport, 2022, 35(11): 318-328. | |
| 24 | 何俊南, 姜京秀, 孙朋朋. 降雪环境对激光雷达性能的影响分析与试验研究[J]. 时代汽车, 2323, 12: 20-22. |
| He Jun-nan, Jiang Jing-xiu, Sun Peng-peng. Analysis and experimental research on the influence of lidar performance in snowfall environment[J]. Auto Time, 2323, 12: 20-22. | |
| 25 | Kutila M, Pyykönen P, Holzhüter H, et al. Automotive lidar performance verification in fog and rain[C]∥21st International Conference on Intelligent Transportation Systems, New York, USA, 2018: 1695-1707. |
| 26 | Wang W, Wu L G, Li X, et al. An evaluation method for automated vehicles combining subjective and objective factors[J]. Machines, 2023, 11(6): 1-22. |
| [1] | 曲俊龙,史文库,玄圣夷,陈志勇. 面向汽车传动系统多挡共振的多级吸振器参数设计方法[J]. 吉林大学学报(工学版), 2025, 55(2): 444-455. |
| [2] | 胡宏宇,张争光,曲优,蔡沐雨,高菲,高镇海. 基于双分支和可变形卷积网络的驾驶员行为识别方法[J]. 吉林大学学报(工学版), 2025, 55(1): 93-104. |
| [3] | 王军年,曹宇靖,罗智仁,李凯旋,赵文伯,孟盈邑. 基于双目视觉的道路水深在线检测算法[J]. 吉林大学学报(工学版), 2025, 55(1): 175-184. |
| [4] | 谭草,任浩鑫,葛文庆,宋亚东,陆佳瑜. 直驱阀控液压振动平台改进自抗扰控制[J]. 吉林大学学报(工学版), 2025, 55(1): 84-92. |
| [5] | 李寿涛,杨路,屈如意,孙鹏鹏,于丁力. 基于模型预测控制的滑移率控制方法[J]. 吉林大学学报(工学版), 2024, 54(9): 2687-2696. |
| [6] | 吴量,顾义凡,邢彪,马芳武,倪利伟,贾微微. 基于线性二次型调节器的四轮转向与分布式集成控制方法[J]. 吉林大学学报(工学版), 2024, 54(9): 2414-2422. |
| [7] | 王玉海,李晓之,李兴坤. 面向高速工况的混合动力卡车预见性节能算法[J]. 吉林大学学报(工学版), 2024, 54(8): 2121-2129. |
| [8] | 常胜,刘宏飞,邹乃威. 汽车变曲率路径循迹H∞回路成形鲁棒控制[J]. 吉林大学学报(工学版), 2024, 54(8): 2141-2148. |
| [9] | 刘建泽,柳江,李敏,章新杰. 基于最小二乘的车速解耦路面辨识方法[J]. 吉林大学学报(工学版), 2024, 54(7): 1821-1830. |
| [10] | 谢宪毅,张明君,金立生,周彬,胡涛,白宇飞. 考虑舒适度的智能汽车人工蜂群轨迹规划方法[J]. 吉林大学学报(工学版), 2024, 54(6): 1570-1581. |
| [11] | 刘从臻,陈高,刘洪柱,马强,徐成伟,孟辉,王国林. 湿滑路面轮胎接地力学特性模型[J]. 吉林大学学报(工学版), 2024, 54(6): 1501-1511. |
| [12] | 黄玲,崔躜,游峰,洪佩鑫,钟浩川,曾译萱. 适用于多车交互场景的车辆轨迹预测模型[J]. 吉林大学学报(工学版), 2024, 54(5): 1188-1195. |
| [13] | 郭洪艳,王连冰,赵旭,戴启坤. 考虑侧向运动的整车质量与道路坡度估计[J]. 吉林大学学报(工学版), 2024, 54(5): 1175-1187. |
| [14] | 陆玉凯,袁帅科,熊树生,朱绍鹏,张宁. 汽车漆面缺陷高精度检测系统[J]. 吉林大学学报(工学版), 2024, 54(5): 1205-1213. |
| [15] | 汪少华,张启睿,施德华,殷春芳,李春. 双行星排式混合动力传动系统非线性振动响应特性分析[J]. 吉林大学学报(工学版), 2024, 54(4): 890-901. |
|
||