吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (3): 938-946.doi: 10.13229/j.cnki.jdxbgxb.20230553
基于Faster-RCNN改进的交通标志检测算法
李学军1( ),权林霏1,刘冬梅1(),于树友2
),权林霏1,刘冬梅1(),于树友2
- 1.长春大学 电子信息工程学院,长春 130012
2.吉林大学 控制科学与工程系,长春 130012
Improved Faster⁃RCNN algorithm for traffic sign detection
Xue-jun LI1(),Lin-fei QUAN1,Dong-mei LIU1(),Shu-you YU2
- 1.College of Electronic & Information Engineering,Changchun University,Changchun 130012,China
2.Department of Control Science & Engineering,Jilin University,Changchun 130012,China
摘要:
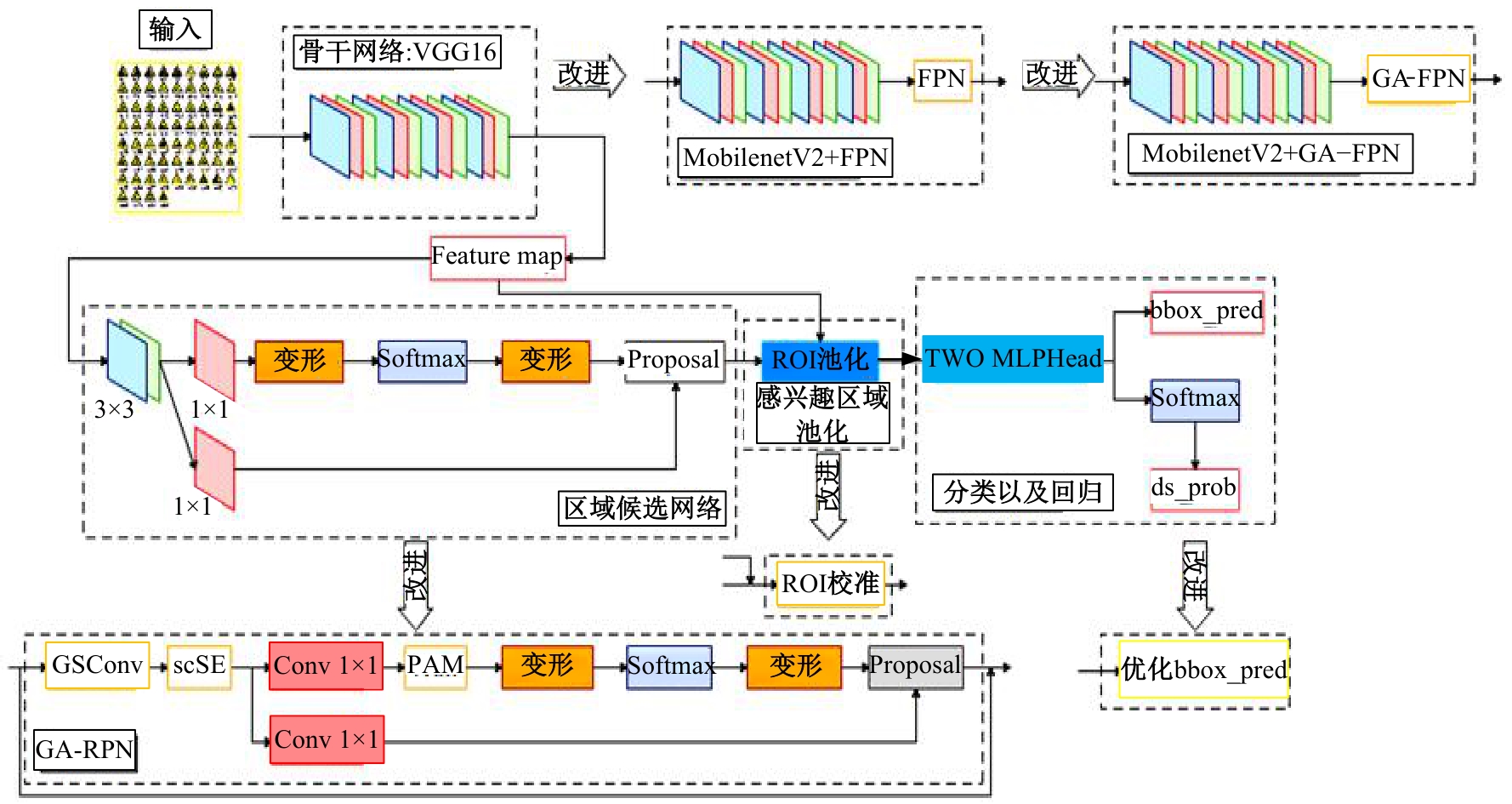
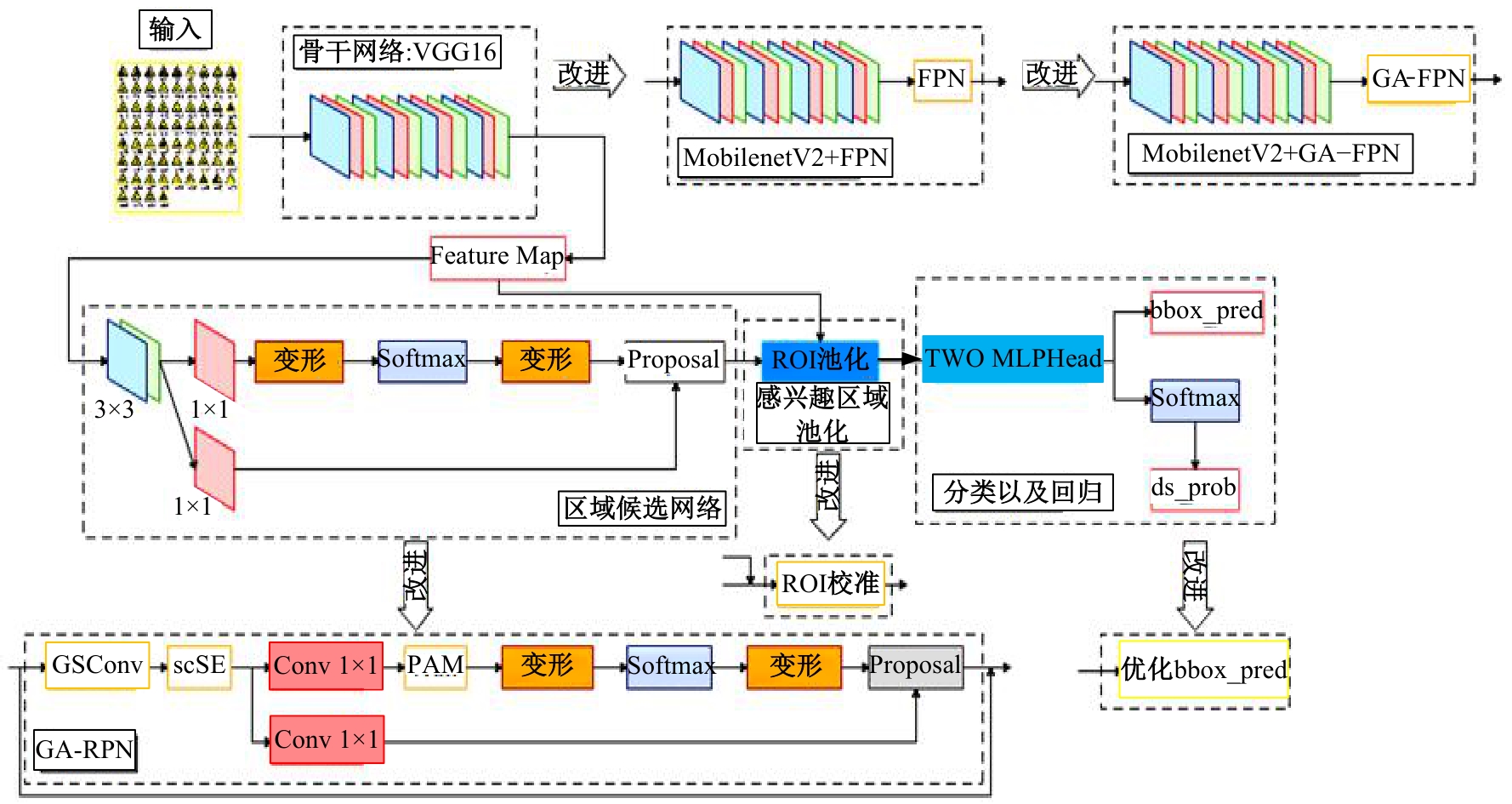
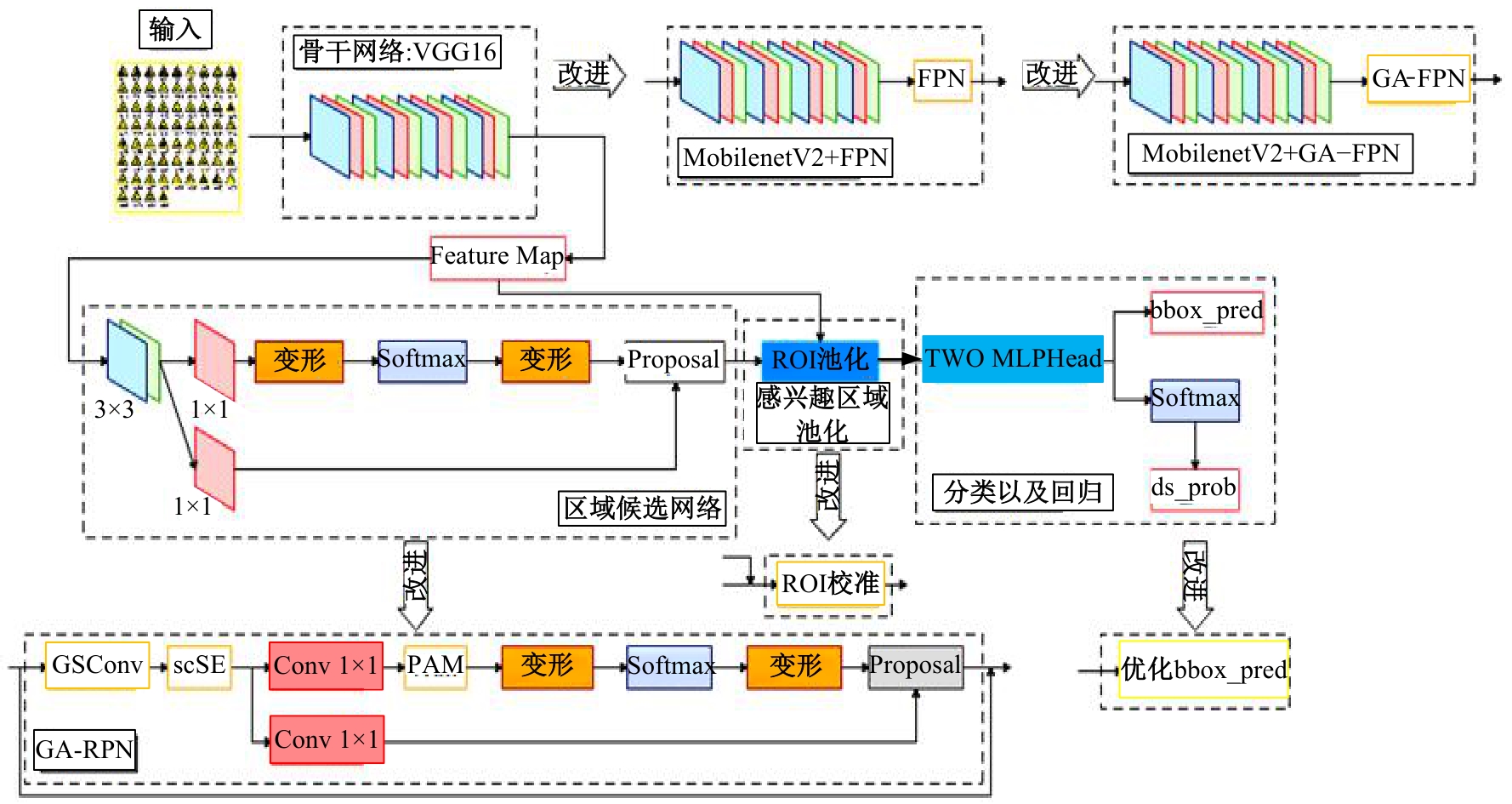
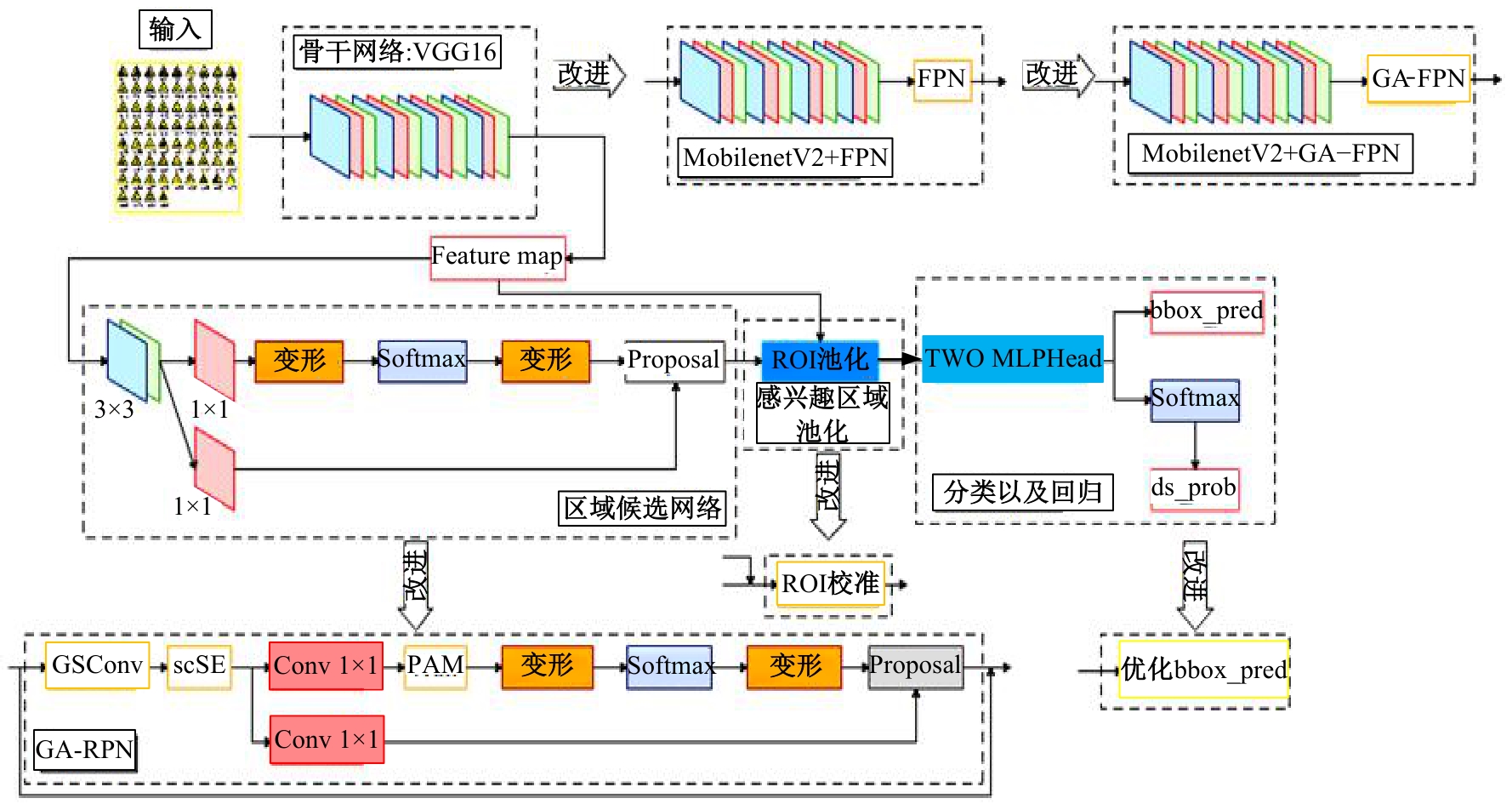
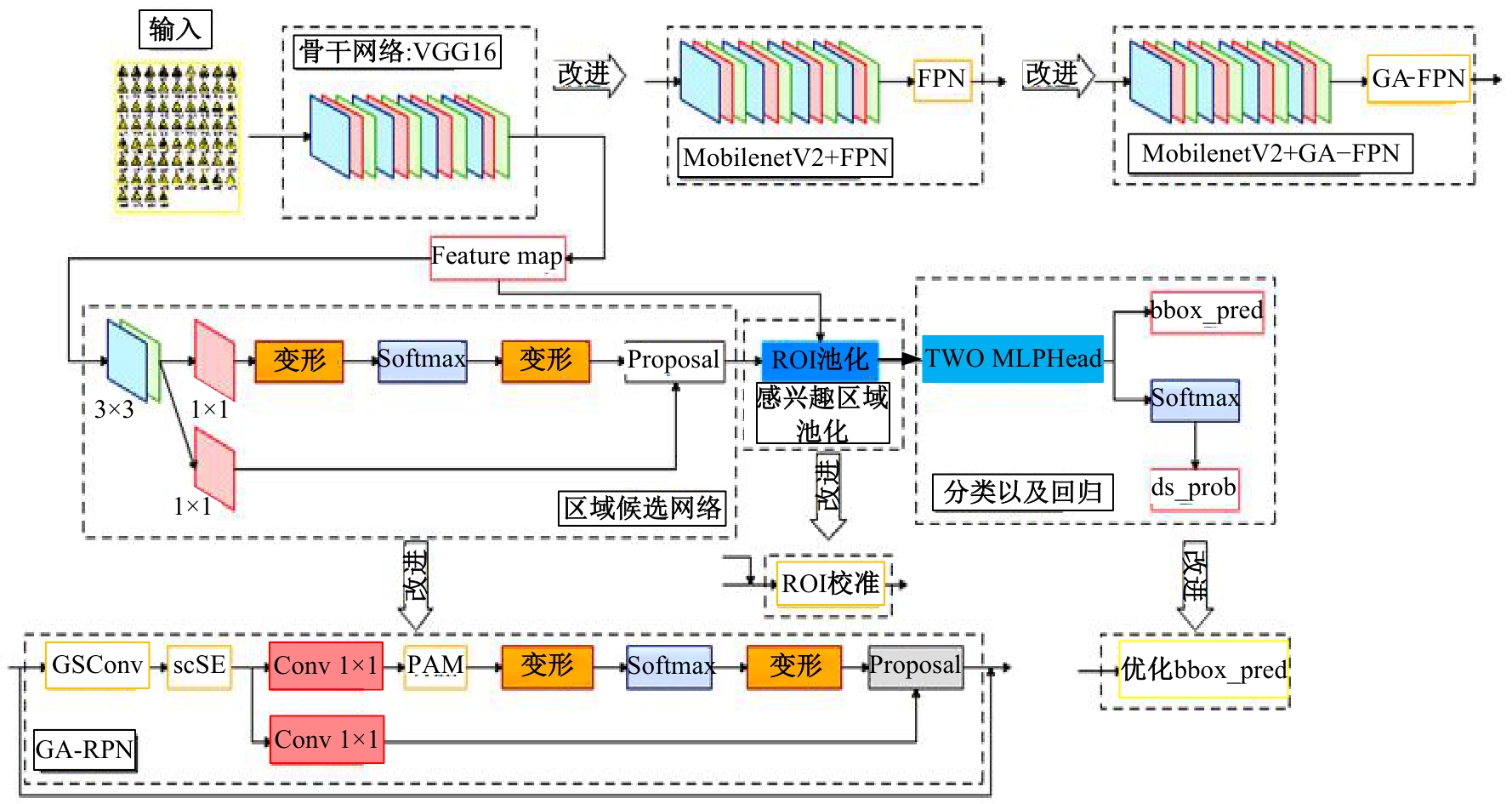
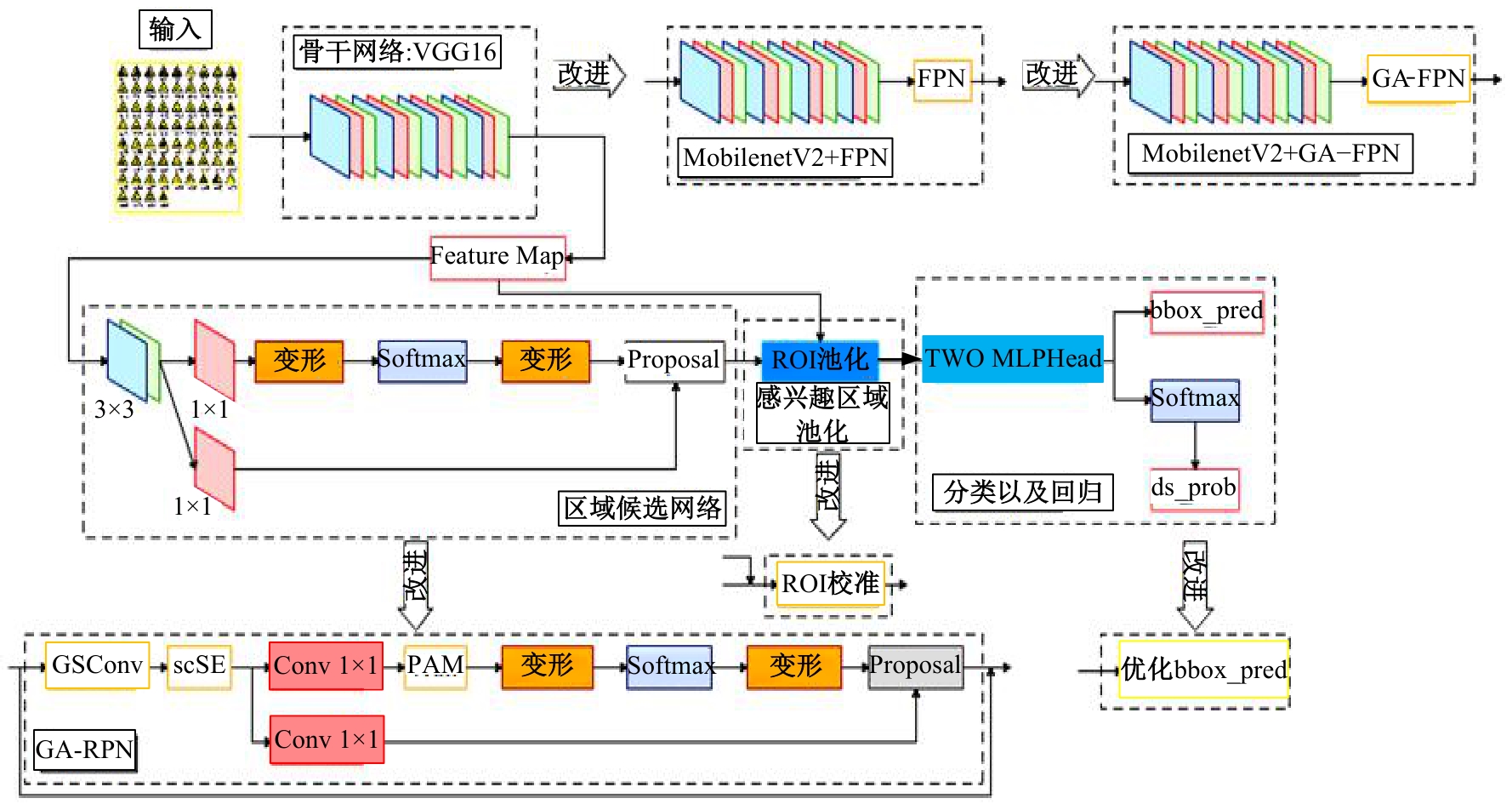
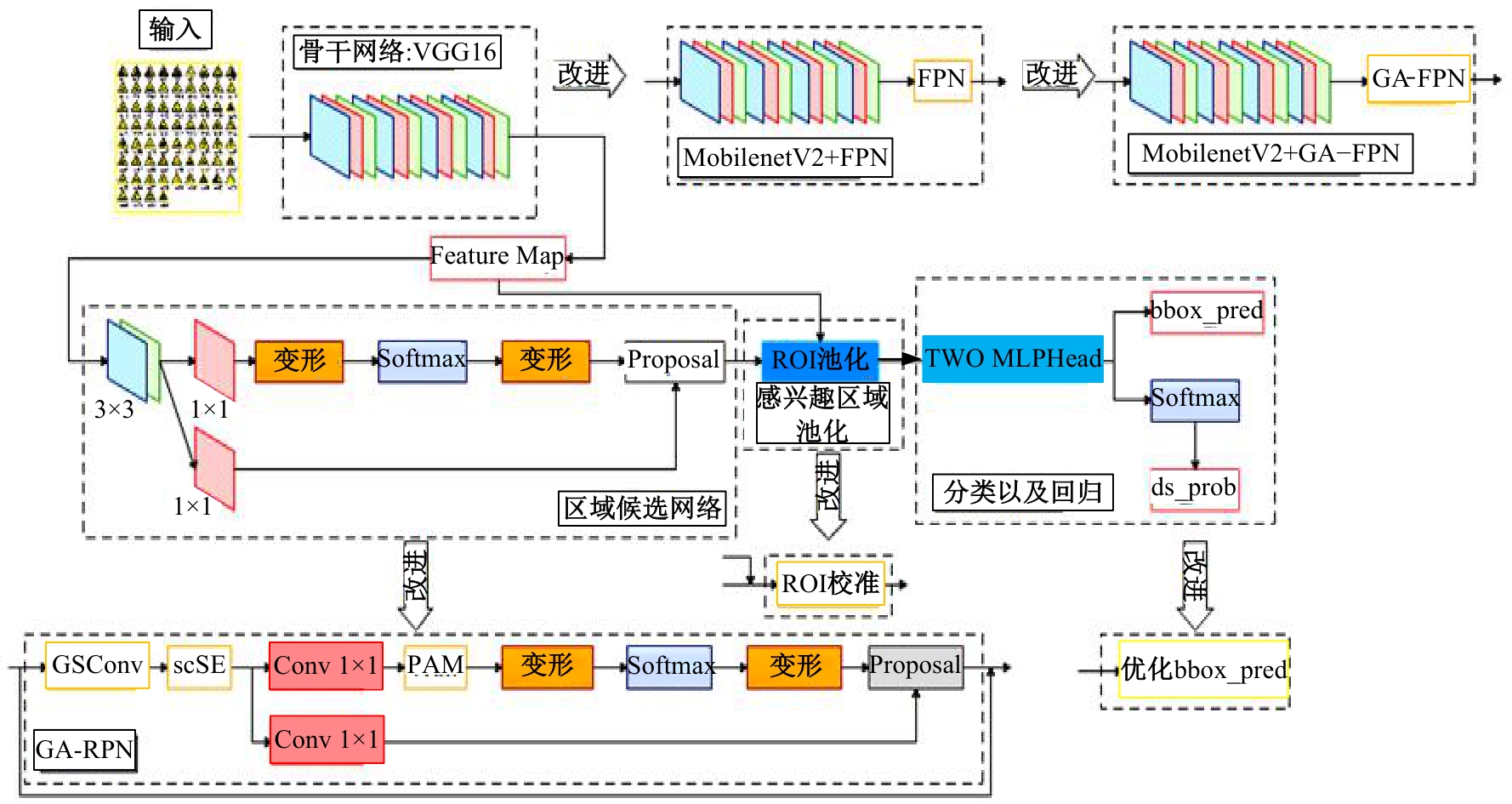
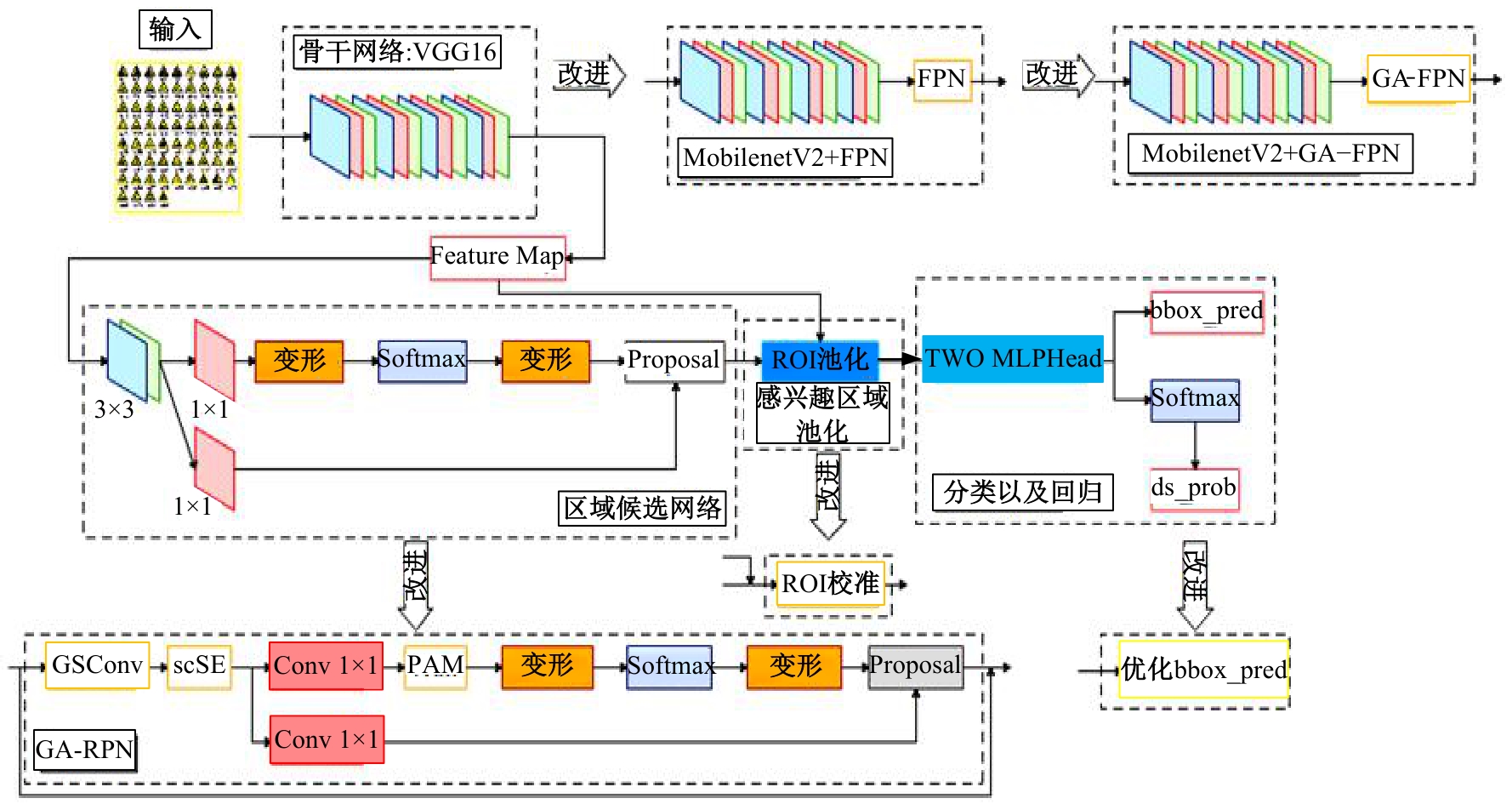
针对真实交通场景下受天气、光线条件的影响较大,远距离小目标交通标志识别效果不佳、计算成本高等问题,以Faster-RCNN的基本架构为基础,提出了一种Faster-RCNN改进算法用于小目标交通标志检测。通过重构骨干网络和改进区域候选网络,使网络框架轻量化。融合scSE注意力和GSConv卷积设计了多尺度特征融合网络,同时更新Anchors锚选框尺寸,提高网络对交通标志目标的定位能力和识别能力。采用对每个目标子区域进行双线性插值的ROI Align池化操作保留目标区域细节特征,提高远距离目标的细节拾取能力;采用平衡L1损失函数解决大梯度难学样本与小梯度易学样本间的不平衡问题,提高训练效果。使用扩充后的TT100K数据集进行测试,实验结果表明:本文算法与传统Faster-RCNN相比,模型权重减少了200 MB,检测精度提高了21.3%。在阴天等低强度环境中交通标志检测精度可以达到85%,有助于提高极端环境下的交通标志检测性能。
中图分类号:
- TP391

| 1 | Cai Y, Luan T, Gao H, et al. YOLOv4-5D: an effective and efficient object detector for autonomous driving[J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70: 1-13. |
| 2 | Wang H, Chen Z, Cai Y, et al. Voxel-RCNN-complex: an effective 3-D point cloud object detector for complex traffic conditions[J]. IEEE Transactions on Instrumentation and Measurement, 2022, 71: 1-12. |
| 3 | Wang H, Chen Y, Cai Y, et al. SFNet-N: an improved SFNet algorithm for semantic segmentation of low-light autonomous driving road scenes[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(11): 21405-21417. |
| 4 | Chen G, Chen K, Zhang L, et al. VCANet: vanishing-point-guided context-aware network for small road object detection[J]. Automotive Innovation, 2021, 4: 400-412. |
| 5 | 孟繁星, 于瓅. 基于YOLOv5-EA的交通标志识别[J]. 辽宁工业大学学报: 自然科学版, 2022, 42(5): 303-310. |
| Meng Fan-xing, Yu Li. Traffic sign recognition based on YOLOv5-EA[J].Journal of Liaoning Institute of Technology(Natural Science Edition), 2022, 42(5): 303-310. | |
| 6 | 田智慧, 孙盐盐, 魏海涛. 基于SSD模型的交通标志检测算法[J]. 计算机应用与软件, 2021, 38(12): 201-206. |
| Tian Zhi-hui, Sun Yan-yan, Wei Hai-tao. Traffic sign detection algorithm based on ssd model[J]. Computer Applications and Software,2021, 38(12): 201-206. | |
| 7 | Ayachi R, Afif M, Said Y, et al. Traffic signs detection for real-world application of an advanced driving assisting system using deep learning[J]. Neural Processing Letters, 2020, 51: 837-851. |
| 8 | Zhang J, Hui L, Lu J, et al. Attention-based neural network for traffic sign detection[C]∥24th International Conference on Pattern Recognition (ICPR),Beijing,China, 2018: 1839-1844. |
| 9 | Fan B B, Yang H. Multi-scale traffic sign detection model with attention[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2021, 235(2/3): 708-720. |
| 10 | Cao J, Zhang J, Jin X. A traffic-sign detection algorithm based on improved sparse R-CNN[J]. IEEE Access, 2021, 9: 122774-122788. |
| 11 | Zhu Z, Liang D, Zhang S, et al. Traffic-sign detection and classification in the wild[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition,Las Vegas, USA,2016: 2110-2118. |
| 12 | Li H L, Li J, Wei H B, et al. Slim-neck by GSConv: a better design paradigm of detector architectures for autonomous vehicles[J/OL].[2023-05-15]. |
| 13 | 蒋镕圻, 彭月平, 谢文宣, 等. 嵌入scSE模块的改进YOLOv4小目标检测算法[J]. 图学学报, 2021, 42(4): 546-555. |
| Jiang Rong-qi, Peng Yue-ping, Xie Wen-xuan, et al.Improved YOLOv4 small target detection algorithm with embedded scSE module[J]. Journal of Graphics,2021, 42(4): 546-555. | |
| 14 | He K, Gkioxari G, Dollár P, et al. Mask R-CNN[C]∥Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy,2017: 2961-2969. |
| [1] | 徐慧智,蒋时森,王秀青,陈爽. 基于深度学习的车载图像车辆目标检测和测距[J]. 吉林大学学报(工学版), 2025, 55(1): 185-197. |
| [2] | 王宏志,宋明轩,程超,解东旋. 基于改进YOLOv5算法的道路目标检测方法[J]. 吉林大学学报(工学版), 2024, 54(9): 2658-2667. |
| [3] | 陶博,颜伏伍,尹智帅,武冬梅. 基于高精度地图增强的三维目标检测算法[J]. 吉林大学学报(工学版), 2023, 53(3): 802-809. |
| [4] | 潘晓英,魏德,赵逸喆. 基于Mask R⁃CNN和上下文卷积神经网络的肺结节检测[J]. 吉林大学学报(工学版), 2022, 52(10): 2419-2427. |
| [5] | 金立生,郭柏苍,王芳荣,石健. 基于改进YOLOv3的车辆前方动态多目标检测算法[J]. 吉林大学学报(工学版), 2021, 51(4): 1427-1436. |
| [6] | 李厚杰,王法胜,贺建军,周瑜,李威,窦宇轩. 基于伪样本正则化Faster R⁃CNN的交通标志检测[J]. 吉林大学学报(工学版), 2021, 51(4): 1251-1260. |
| [7] | 于向军,槐元辉,姚宗伟,孙中朝,俞安. 工程车辆无人驾驶关键技术[J]. 吉林大学学报(工学版), 2021, 51(4): 1153-1168. |
| [8] | 王方石, 王坚, 李兵, 王博. 基于深度属性学习的交通标志检测[J]. 吉林大学学报(工学版), 2018, 48(1): 319-329. |
| [9] | 王新竹, 李骏, 李红建, 尚秉旭. 基于三维激光雷达和深度图像的自动驾驶汽车障碍物检测方法[J]. 吉林大学学报(工学版), 2016, 46(2): 360-365. |
| [10] | 王荣本;李琳辉;郭烈;金立生;张明恒 . 基于立体视觉的越野环境感知技术[J]. 吉林大学学报(工学版), 2008, 38(03): 520-0524. |
|