吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (5): 1483-1496.doi: 10.13229/j.cnki.jdxbgxb.20240722
• 综述 • 下一篇
四足机器人运动及稳定控制关键技术综述
王旭( )
)
- 北京科技大学 创新创业学院,北京 100083
An overview of key technologies for quadruped robot motion and stability control
Xu WANG()
- School of Innovation and Entrepreneurship,University of Science and Technology Beijing,Beijing 100083,China
摘要:
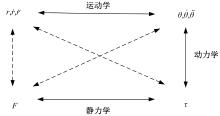
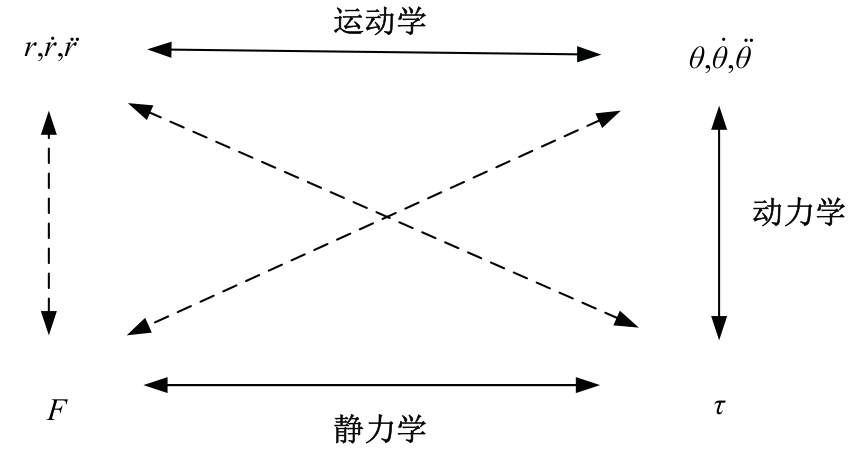
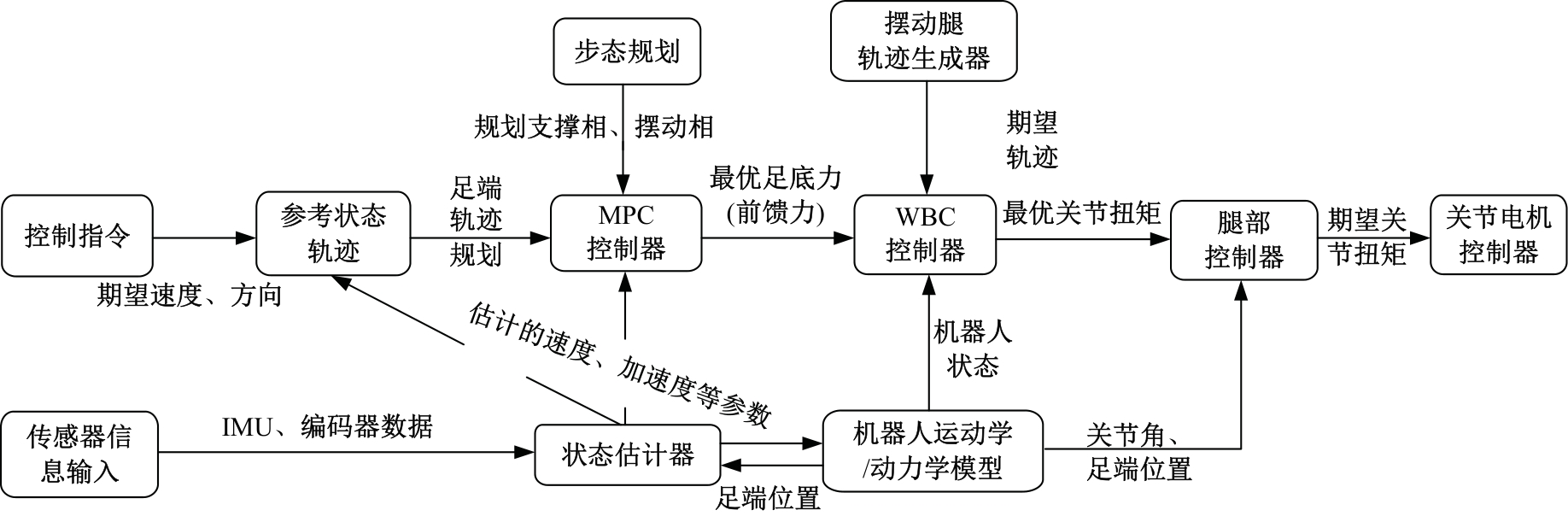
本文在分析四足机器人主要研究内容的基础上,基于四足机器人运动及稳定控制要求,对四足机器人的机构设计、运动学与动力学分析、步态与足端轨迹规划、关节驱动器、运动稳定控制等关键技术进行了梳理与总结,构建了各技术模块之间的逻辑关系,系统阐述了四足机器人运动及稳定控制架构,可为足式机器人研究者提供参考。
中图分类号:
- TP242

| [1] | Hirose S, Kato K. Study on quadruped walking robot in Tokyo Institute of Technology-past, present and future[C]∥IEEE International Conference on Robotics & Automation,San Fracisco,USA, 2000:414-419. |
| [2] | Tee T W, Low K H, Ng H Y, et al. Mechatronics design and gait implementation of a quadruped legged robot[C]∥IEEE International Conference on Control, Hangzhou, China, 2003: 826-832. |
| [3] | Huang Y, Meijer O G, Lin J, et al. The effects of stride length and stride frequency on trunk coordination in human walking[J]. Gait & Posture, 2010, 31(4): 444-449. |
| [4] | Mcghee R B, Frank A A. On the stability properties of quadruped creeping gaits[J]. Mathematical Bioences, 1968, 3(1): 331-351. |
| [5] | Messuri D, Klein C A. Automatic body regulation for maintaining stability of a legged vehicle during rough-terrian locomotion[J]. IEEE Journal of Robotics & Automation, 1985, 1(3): 132-141. |
| [6] | Hirose S, Tsukagoshi H, Yoneda K. Normalized energy stability margin and its contour of walking vehicles on rough terrain[C]∥The IEEE International Conference on Robotics & Automation,Seoul, South Korea, 2001: 181-186. |
| [7] | Pack D J, Kang H. An omnidirectional gait control using a graph search method for a quadruped walking robot[C]∥The IEEE International Conference on Robotics & Automation, Nogoya, Japan,1995: 988-993. |
| [8] | 王新杰, 李培根, 陈学东, 等. 四足步行机器人关节位姿和稳定性研究[J]. 中国机械工程, 2005, 16(17): 1561-1566. |
| Wang Xin-jie, Li Pei-gen, Chen Xue-dong, et al. Research on joint posture and stability of quadruped walking robot[J]. China Mechanical Engineering, 2005, 16(17): 1561-1566. | |
| [9] | 伍科布拉托维奇. 步行机器人和动力型假肢[M]. 北京: 科学出版社, 1983. |
| [10] | Lin B S, Song S M. Dynamic modeling, stability and energy efficiency of a quadrupedal walking machine[C]∥The IEEE International Conference on Robotics & Automation, Atlanta, USA, 2001: 367-373 |
| [11] | Won M, Kang T H, Chung W K. Gait planning for quadruped robot based on dynamic stability: landing accordance ratio[J]. Intelligent Service Robotics, 2009, 2(2): 105-112. |
| [12] | Hoyt D F, Taylor C R. Gait and the energetics of locomotion in horses[J]. Nature, 1981, 292: 239-240. |
| [13] | Alexander R M. The maximum forces exerted by animals[J]. Journal of Experimental Biology, 1985, 115: 231-238. |
| [14] | Pratt G A, Williamson M M. Series elastic actuators[C]∥IEEE International Conference on Intelligent Robots & Systems, Pittsburgh, USA, 1995: 399-406. |
| [15] | Au S K, Weber J, Herr H. Powered ankle-foot prosthesis improves walking metabolic economy[J]. IEEE Transactions on Robotics, 2009, 25(1): 51-66. |
| [16] | Wolf S, Hirzinger G. A new variable stiffness design: matching requirements of the next robot generation[C]∥IEEE International Conference on Robotics and Automation, Zhangjiajie, China, 2008: 1741-1746. |
| [17] | Paul R P. Robot Manipulators: Mathematics, Programming and Control[M]. Cambridge: The MIT Press, 1981. |
| [18] | Mcghee R B, Iswandhi G I. Adaptive locomotion of a multilegged robot over rough terrain[J]. IEEE Transactions on Systems Man and Cybernetics, 1979, 9(4): 176-182. |
| [19] | Fukuoka Y, Kimura H, Hada Y, et al. Adaptive dynamic walking of a quadruped robot on irregular terrain by using neural system model[C]∥IEEE/RSJ International Conference on Intelligent Robots & Systems, Takamatsu, Japan, 2000: 979-984. |
| [20] | Buehler M, Playter R, Raibert M. Robots step outside[C]∥International Symposium on Adaptive Motion of Animals and Machines (AMAM),Ilmenau, Germany, 2005: 1-4. |
| [21] | Raibert M, Blankespoor K, Nelson G, et al. BigDog, the rough-terrain quadruped robot[C]∥World Congress,Seoul, South Korea, 2008: 10822-10825. |
| [22] | Albiez J, Kerscher T, Grimminger F, et al. PANTER-prototype for a fast-running quadruped robot with pneumatic muscles[C]∥Proccedings of the 6th International Conference on Climbing and Walking Robots (CLAWAR), Moscow, Russia, 2003: 107411282. |
| [23] | Masuda K, Shimizu M, Narioka K, et al. 1P1-O15 realization of the dynamic locomotion with a quadruped robot based on the musculoskeletal system driven by pneumatic artificial muscles(biorobotics)[J]. The Proceedings of JSME annual Conference on Robotics and Mechatronics, 2011, 4: 1-4. |
| [24] | Pratt J E. Virtual Model Control of a Biped Walking Robot[M]. Cambridge: Massachusetts Institute of Technology, 1995. |
| [1] | 张涛,林黄达,余中军. 混合动力车辆换挡的实时滚动优化控制方法[J]. 吉林大学学报(工学版), 2025, 55(4): 1215-1224. |
| [2] | 宫洵,任航,张华霖,汪介瑜,胡云峰,孙耀. 冬季网联纯电动汽车热泵空调生态制热控制方法[J]. 吉林大学学报(工学版), 2025, 55(3): 820-828. |
| [3] | 李寿涛,杨路,屈如意,孙鹏鹏,于丁力. 基于模型预测控制的滑移率控制方法[J]. 吉林大学学报(工学版), 2024, 54(9): 2687-2696. |
| [4] | 孙帅帅,冯春晓,张良. 基于离散采样的多模态四足机器人路径规划[J]. 吉林大学学报(工学版), 2024, 54(4): 1120-1128. |
| [5] | 赵靖华,张雨彤,曹派,王忠恕,李小平,孙亚南,解方喜. 压缩天然气发动机增程式电动汽车能量管理优化[J]. 吉林大学学报(工学版), 2024, 54(3): 600-609. |
| [6] | 李文航,倪涛,赵丁选,邓英杰,师小波. 基于模型预测反馈技术的救援车辆液压悬挂系统控制方法[J]. 吉林大学学报(工学版), 2024, 54(3): 610-619. |
| [7] | 江和耀,王永海,吴幼冬,王萍. 四轮毂驱动电动车辆横向稳定与侧倾预防协同控制策略[J]. 吉林大学学报(工学版), 2024, 54(2): 540-549. |
| [8] | 刘果,熊坚,杨秀建,何扬帆. 基于曲率增广的智能车辆轨迹跟踪控制[J]. 吉林大学学报(工学版), 2024, 54(12): 3717-3728. |
| [9] | 刘刚,范群,杨旭,任宏斌. 无人驾驶汽车变速换道轨迹跟踪动态控制[J]. 吉林大学学报(工学版), 2024, 54(12): 3729-3739. |
| [10] | 宋秀兰,柴伟豪,何德峰,应颂翔. DoS攻击下网联车队安全协同自适应预测巡航控制[J]. 吉林大学学报(工学版), 2024, 54(11): 3406-3416. |
| [11] | 蒋渊德,欧阳铭,赵祥模,秦孔建,郑兵兵. 车辆纵侧向辅助驾驶集成优化控制策略[J]. 吉林大学学报(工学版), 2024, 54(10): 2741-2753. |
| [12] | 何德峰,周丹,罗捷. 跟随式车辆队列高效协同弦稳定预测控制[J]. 吉林大学学报(工学版), 2023, 53(3): 726-734. |
| [13] | 申富媛,李炜,蒋栋年. 四旋翼无人机寿命预测和自主维护方法[J]. 吉林大学学报(工学版), 2023, 53(3): 841-852. |
| [14] | 谢波,高榕,许富强,田彦涛. 低附着路况条件下人车共享转向系统稳定控制[J]. 吉林大学学报(工学版), 2023, 53(3): 713-725. |
| [15] | 王德军,张凯然,徐鹏,顾添骠,于文雅. 基于车辆执行驱动能力的复杂路况速度规划及控制[J]. 吉林大学学报(工学版), 2023, 53(3): 643-652. |
|