Journal of Jilin University(Engineering and Technology Edition) ›› 2025, Vol. 55 ›› Issue (4): 1142-1162.doi: 10.13229/j.cnki.jdxbgxb.20230920
Previous Articles Next Articles
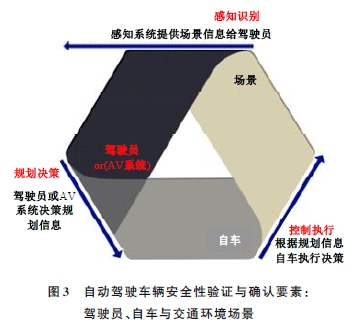
Review of active safety verification and validation for autonomous vehicles in real and virtual scenarios
Zhen-hai GAO1( ),Cheng-yuan ZHENG2,Rui ZHAO2()
),Cheng-yuan ZHENG2,Rui ZHAO2()
- 1.National Key Laboratory of Automotive Chassis Integration and Bionics,Jilin University,Changchun 130022,China
2.College of Automotive Engineering,Jilin University,Changchun 130022,China
CLC Number:
- U495



| [1] | 刘新. 工信部: 规范智能网联汽车道路测试与示范应用[J]. 中国设备工程, 2021(16): 1. |
| Liu Xin. Ministry of Industry and Information Technology: regulating road testing and demonstration of intelligent connected vehicles[J]. China Equipment Engineering, 2021(16): 1. | |
| [2] | Ho S S. Complementary and competitive framing of driverless cars: framing effects, attitude volatility, or attitude resistance?[J]. International Journal of Public Opinion Research, 2021, 33(3): 512-531. |
| [3] | Yurtsever E, Lambert J, Carballo A, et al. A survey of autonomous driving: common practices and emerging technologies[J]. IEEE Access, 2020, 8: 58443-58469. |
| [4] | Koopman P, Wagner M. Autonomous vehicle safety: an interdisciplinary challenge[J]. IEEE Intelligent Transportation Systems Magazine, 2017, 9(1): 90-96. |
| [5] | 暴爽, 李丽香, 彭海朋. 智能车联网信息安全研究[J]. 信息安全与通信保密, 2023(3): 10-20. |
| Bao Shuang, Li Li-xiang, Peng Hai-peng. Research on information security in intelligent internet of vehicles [J]. Information Security and Communications Privacy, 2023(3): 10-20. | |
| [6] | 董友建, 周文华. 关于人工智能的一些科技伦理问题——从“阿尔法狗”谈起[C]∥云南省第4、5届科学技术哲学与科学技术史研究生论坛优秀论文集, 中国, 昆明, 2015: 178-185. |
| [7] | .International Standard Organization Road Vehicles-Safety of the Intended Functionality [S]. |
| [8] | Chen L, Jiao J, Zhao T. A novel hazard analysis and risk assessment approach for road vehicle functional safety through integrating STPA with FMEA[J]. Applied Sciences, 2020, 10: No. 7400. |
| [9] | Wachenfeld W, Winner H. The release of autonomous vehicles[J]. Autonomous Driving: Technical, Legal and Social Aspects, 2016(5): 425-449. |
| [10] | ,Road vehicles—Safety and cybersecurity for automated driving systems—Design, verification and validation [S]. |
| [11] | 张鑫. 基于卡车行驶数据的驾驶行为分析评价系统研究[D].天津:天津大学机械工程学院, 2021. |
| Zhang Xin. Research on driving behavior analysis and evaluation system based on truck driving data[D].Tianjin: School of Mechanical Engineering, Tianjin University, 2021. | |
| [12] | 方一格. 基于续驶里程及安全性能的电池包轻量化设计[D]. 长沙: 湖南大学机械与运载工程学院, 2021. |
| Fang Yi-ge. Lightweight design of battery pack based on driving range and safety performance[D]. Changsha: School of Mechanical and Vehicle Engineering, Hunan University, 2021. | |
| [13] | 涂辉招, 崔航, 鹿畅, 等. 面向自动驾驶路测驾驶能力评估的避险脱离率模型[J]. 同济大学学报: 自然科学版, 2020, 48(11): 8-16. |
| Tu Hui-zhao, Cui Hang, Lu Chang, et al. Evasion disengagement rate model for assessing driving capability in autonomous road testing [J]. Journal of Tongji University(Natural Science), 2020, 48(11): 8-16. | |
| [14] | 王慧然. 基于预期功能安全的自动驾驶汽车换道控制关键技术研究[D]. 合肥:合肥工业大学汽车与交通工程学院, 2021. |
| Wang Hui-ran. Research on key technologies of lane change control of autonomous vehicles based on expected functional safety[D]. Hefei: School of Automotive and Traffic Engineering, Hefei University of Technology, 2021. | |
| [15] | 夏春艳, 黄松, 郑长友, 等. 自动驾驶交叉路口测试场景建模及验证方法[J]. 软件学报, 2023, 34(7):3002-3021. |
| Xia Chun-yan, Huang Song, Zheng Chang-you, et al. Modeling and verification methods of autonomous driving intersection test scenarios [J]. Journal of Software, 2023, 34(7): 3002-3021. | |
| [16] | 王殿林. 自动在线规约挖掘技术研究[D]. 长沙:国防科学技术大学研究生院, 2011. |
| Wang Dian-lin. Research on automatic online protocol mining technology[D]. Changsha: Graduate School of National University of Defense Technology, 2011. | |
| [17] | Pek C, Manzinger S, Koschi M, et al. Using online verification to prevent autonomous vehicles from causing accidents[J]. Nature Machine Intelligence, 2020(9): 518-528. |
| [18] | 中华人民共和国国家标准. 质量管理体系基础和术语[J]. 质量春秋, 2009(6): 12. |
| Standardization Administration of China. Fundamentals and vocabulary of quality management systems [J]. Quality Spring and Autumn, 2009(6): 12. | |
| [19] | 高雅, 朱西产. L3级自动驾驶系统安全认证方法[J].佳木斯大学学报:自然科学版, 2022, 40(3): 46-49. |
| Gao Ya, Zhu Xi-chan. Safety certification method for L3-level autonomous driving systems[J]. Journal of Jiamusi University(Natural Science Edition), 2022, 40(3): 46-49. | |
| [20] | 刘佳熙, 郭辉, 李君. 汽车电子电气系统的功能安全标准ISO26262[J]. 上海汽车, 2011(10): 57-61. |
| Liu Jia-xi, Guo Hui, Li Jun. Functional safety standard ISO 26262 for automotive electrical and electronic systems[J]. Shanghai Automobile, 2011(10): 57-61. | |
| [21] | 赵晨熙. 《道路交通安全法》大修[J]. 人民交通, 2021(10): 54-56. |
| Zhao Chen-xi. Major revision of the Road Traffic Safety Law[J]. People's Transportation, 2021(10): 54-56. | |
| [22] | Leung K, Schmerling E, Zhang M, et al. On infusing reachability-based safety assurance within planning frameworks for human-robot vehicle interactions[J]. The International Journal of Robotics Research, 2020, 39(10/11): 1326-1345. |
| [23] | 叶强. 德国自动驾驶立法评析[J]. 国外社会科学, 2022(2): 73-86, 197. |
| Ye Qiang. Review of legislation on autonomous driving in Germany [J]. Foreign Social Sciences, 2022(2): 73-86, 197. | |
| [24] | Small M M, Johnston I. Lane keeping systems for light vehicles: draft ADR 107/00[R]. Canberra: Australasian College of Road Safety, 2022. |
| [25] | Tenbrock A, König A, Keutgens T, et al. The conscend dataset: concrete scenarios from the highd dataset according to alks regulation unece r157 in openx[C]∥IEEE Intelligent Vehicles Symposium Workshops, Beijing, 2021: 174-181. |
| [26] | T/ . 自动驾驶汽车试验道路技术标准[S]. |
| [27] | 李沛盈. 《关于加强智能网联汽车生产企业及产品准入管理的意见》解读与应对[J]. 网络安全和信息化, 2021(9): 47. |
| Li Pei-ying. Interpretation and response to the opinions on strengthening the access management of intelligent connected vehicle manufacturers and products[J]. Cybersecurity and Informatization, 2021(9): 47. | |
| [28] | . 机动车运行安全技术条件 [S]. |
| [29] | 张行, 孙航. GB/T 40429—2021《汽车驾驶自动化分级》分析[J]. 中国汽车, 2022(5): 3-5, 7. |
| Zhang Xing, Sun Hang. Analysis of GB/T 40429—2021 classification of driving automation for vehicles [J]. China Auto, 2022(5): 3-5, 7. | |
| [30] | 孙航, 张路, 季国田. 智能网联汽车标准体系及重点标准研究与展望[J]. 汽车安全与节能学报, 2024,15(6): 795-812. |
| Sun Hang, Zhang Lu, Ji Guo-tian. Research and prospects of the standard system and key standards for intelligent connected vehicles[J]. Journal of Automotive Safety and Energy, 2024, 15(6): 795-812. | |
| [31] | SAE J3016_201401, Taxonomy and definitions for terms related to on-road motor vehicle automated driving systems [S]. |
| [32] | Riedmaier S, Ponn T, Ludwig D, et al. Survey on scenario-based safety assessment of automated vehicles[J]. IEEE Access, 2020, 8: 87456-87477. |
| [33] | Koopman P. UL 4600: What to include in an autonomous vehicle safety case[J]. Computer, 2023, 56(5): 101-104. |
| [34] | International SAE. SAE international releases updated J3018™ Standard for On-Road Testing of SAE Level 3, 4 and 5 Prototype Automated Driving System (ADS)[R]. Warrendale: Newswire P, 2019. |
| [35] | Forest Thomas M. Cybersecurity Guidebook for Cyber-Physical Vehicle Systems[M]. New York:SAE International, 2016. |
| [36] | van Den Berg J, Ferguson D, Kuffner J. Anytime path planning and replanning in dynamic environments[C]∥Proceedings of IEEE International Conference on Robotics and Automation, Shanghai, China, 2006: 2366-2371. |
| [37] | Schmidt C, Oechsle F, Branz W. Research on trajectory planning in emergency situations with multiple objects[C]∥IEEE Intelligent Transportation Systems Conference, Toranto, Canada, 2006: 988-992. |
| [38] | BMVI. Germany will be the World Leader in Autonomous Driving[R]. Federal Ministry of Transport and Digital Infrastructure, Germany, 2021. |
| [39] | Shalev-Shwartz S, Shammah S, Shashua A. On a formal model of safe and scalable self-driving cars[J/OL].[2023-08-22]. . |
| [40] | Wang X, Liu X, Zhong F, et al. A scenario generation method for typical operations of power systems with pv integration considering weather factors[J]. Sustainability, 2023, 15(20): No.15007. |
| [41] | Shalev-Shwartz S, Shammah S, Shashua A. On a formal model of safe and scalable self-driving cars[J/OL].[2023-08-22]. . |
| [42] | David N, Hon-Leung L, Ng Julia, et al. An Introduction to the Safety Force Field[M]. City of Santa Clara: NVIDIA Corporation, 2019. |
| [43] | 电子发烧友网. 自动驾驶的关键技术有哪些?[EB/OL]. [2023-08-22].. |
| [44] | 梁耘瀚, 张慧珺, 刘斌, 等. 驾驶员弯道操纵能力实车测试与分析方法研究[J]. 汽车技术, 2022(6): 47-54. |
| Liang Yun-han, Zhang Hui-jun, Liu Bin, et al. Experimental testing and analysis method of driver's cornering operation ability [J]. Automotive Technology, 2022(6): 47-54. | |
| [45] | Zhang Y, Lu S, Yang Y, et al. Internet-distributed vehicle-in-the-loop simulation for HEVs[J]. IEEE Transactions on Vehicular Technology, 2018, 67(5):3729-3739. |
| [46] | 刘俊, 郭洪艳, 戴启坤, 等. 基于驾驶员在环实验的人车协同转向控制器评价方法[P]. 中国: CN111752168A, 2025-03-28. |
| [47] | 王孝鹏, 吴龙. 车辆动力学建模与仿真[M]. 成都: 西南交通大学出版社, 2020. |
| [48] | 朱冰, 张培兴, 赵健, 等. 基于场景的自动驾驶汽车虚拟测试研究进展[J]. 中国公路学报, 2019, 32(6): 1-19. |
| Zhu Bing, Zhang Pei-xing, Zhao Jian, et al. Research progress of scenario-based virtual testing for autonomous vehicles[J]. China Journal of Highway and Transport, 2019,32(6): 1-19. | |
| [49] | Xu X, Wang X, Wu X, et al. Calibration and evaluation of the responsibility-sensitive safety model of autonomous car-following maneuvers using naturalistic driving study data[J]. Transportation Research Part C: Emerging Technologies, 2021, 123:No.102988. |
| [50] | Strauss M, Mitsch S. Slow down, move over: a case study in formal verification, refinement, and testing of the responsibility-sensitive safety model for self-driving cars[C]∥The 17th International Conference on Tests and Proofs,Leicester, UK, 2023: 149-167. |
| [51] | Wang X, Ye C, Quddus M, et al. Pedestrian safety in an automated driving environment: calibrating and evaluating the responsibility-sensitive safety model[J]. Accident Analysis and Prevention, 2023, 192: No.107265. |
| [52] | Suk H, Kim T, Park H, et al. Rationale-aware autonomous driving policy utilizing safety force field implemented on CARLA simulator[J/OL].[2023-08-22]. . |
| [53] | Ji X, Cui X, Li Z, et al. Research and evaluation of the allosteric protein-specific force field based on a pre-training deep learning model[J]. Journal of Chemical Information and Modeling, 2023, 63(8):2456-2468. |
| [54] | 刘秀芳, 曹凯, 杨旭, 等. 基于可达集的自主车辆安全性验证方法[J]. 广西大学学报: 自然科学版, 2018, 43(2): 488-497. |
| Liu Xiu-fang, Cao Kai, Yang Xu, et al. Safety verification method for autonomous vehicles based on reachable sets[J]. Journal of Guangxi University (Natural Science Edition), 2018, 43(2): 488-497. | |
| [55] | Althoff M, Frehse G, Girard A. Set propagation techniques for reachability analysis[J]. Annual Review of Control, Robotics, and Autonomous Systems, 2021, 4(1): 369-395. |
| [56] | Wetzlinger M, Kulmburg A, Althoff M. Adaptive parameter tuning for reachability analysis of nonlinear systems [C]∥Proceedings of the 24th International Conference on Hybrid Systems, Nashville Tennessee, USA, 2021: 1-11. |
| [57] | Wetzlinger M, Kulmburg A, Le Penven A, et al. Adaptive reachability algorithms for nonlinear systems using abstraction error analysis[J]. Nonlinear Analysis: Hybrid Systems, 2022, 46: No.101252. |
| [58] | 邱锡鹏. 神经网络与深度学习[M]. 北京: 电子工业出版社, 2020: 448. |
| [59] | LeCun Y. 1.1 Deep learning hardware: past, present, and future[C]∥IEEE International Solid-State Circuits Conference-(ISSCC),San Francisco, USA, 2019: 12-19. |
| [60] | Ribeiro C, Pinto T, Silva M, et al. Data mining approach for decision support in real data based smart grid scenario[C]∥The 26th International Workshop on Database and Expert Systems Applications (DEXA), Valencia, Spain, 2015: 73-77. |
| [61] | Yang Y, Yuan Z, Meng R. Exploring traffic crash occurrence mechanism toward cross-area freeways via an improved data mining approach[J]. Journal of Transportation Engineering, Part A: Systems, 2022, 148(9): No.04022052. |
| [62] | Yichao Z, Zhenda H, Linyao Z, et al. Study on scenario generation based on deep clustering and its application in supply-demand imbalance assessment[C]∥ The 8th Asia Conference on Power and Electrical Engineering(ACPEE), Tianjin, China, 2023: 1903-1910. |
| [63] | Duan J, Gao F, He Y. Test scenario generation and optimization technology for intelligent driving systems[J]. IEEE Intelligent Transportation Systems Magazine, 2020, 14(1): 115-127. |
| [64] | Guo P, Gao F. Automated scenario generation and evaluation strategy for automatic driving system[C]∥ The 7th International Conference on Information Science and Control Engineering(ICISCE),2020: 1722-1733. |
| [65] | Tian Y C, Jing D L. Towards an automatic test generation method for systems of systems based on fault injection and model-based systems engineering[J]. Applied Sciences, 2022,12(22): No.11863. |
| [66] | 陈琦. 《智能网联汽车生产企业及产品准入管理指南》为产业变革吹响号角[J]. 汽车与配件, 2021(11):28-29. |
| Chen Qi. The Guidelines for access management of enterprises and products of intelligent connected vehicles: a clarion call for industrial reform[J]. Automobile and Parts, 2021(11): 28-29. | |
| [67] | Gassmann B, Oboril F, Buerkle C, et al. Towards standardization of AV safety: C++ library for responsibility sensitive safety[C]∥IEEE Intelligent Vehicles Symposium (IV), Paris, France, 2019:2265-2271. |
| [68] | Hekmatnejad M, Yaghoubi S, Dokhanchi A, et al. Encoding and monitoring responsibility sensitive safety rules for automated vehicles in signal temporal logic[C]∥Proceedings of the 17th ACM-IEEE International Conference on Formal Methods and Models for System Design, 2019: 1-11. |
| [69] | Salay R, Czarnecki K, Elli M S, et al. PURSS: towards perceptual uncertainty aware responsibility sensitive safety with ML[C]∥Workshop on Artificial Intelligence Safety, New York,USA, 2020:91-95. |
| [70] | Chai C, Zeng X, Wu X, et al. Evaluation and optimization of responsibility-sensitive safety models on autonomous car-following maneuvers[J]. Transportation Research Record, 2020, 2674(11): 662-673. |
| [71] | Liu S, Wang X, Hassanin O, et al. Calibration and evaluation of responsibility-sensitive safety (RSS) in automated vehicle performance during cut-in scenarios[J]. Transportation Research Part C: Emerging Technologies, 2021, 125: No.103037. |
| [72] | Tran D Q, Bae S H. Improved responsibility-sensitive safety algorithm through a partially observable Markov decision process framework for automated driving behavior at non-signalized intersection[J]. International Journal of Automotive Technology, 2021, 22(2): 301-314. |
| [73] | 罗嗣卿, 陈慧. 基于生成对抗网络的图像场景转换[J].计算机工程, 2023, 49(4): 217-225. |
| Luo Si-qing, Chen Hui. Image scene transformation based on generative adversarial networks[J]. Computer Engineering, 2023, 49(4): 217-225. | |
| [74] | Junietz P, Bonakdar F, Klamann B, et al. Criticality metric for the safety validation of automated driving using model predictive trajectory optimization[C]∥2018 21st International Conference on Intelligent Transportation Systems (ITSC), 2018: 60-65. |
| [75] | Kress-Gazit H, Eder K, Hoffman G, et al. Formalizing and guaranteeing human-robot interaction[J]. Communications of the ACM, 2021, 64(9): 78-84. |
| [76] | 陶飞, 张辰源, 戚庆林, 等. 数字孪生成熟度模型[J]. 计算机集成制造系统, 2022, 28(5): 1267-1281. |
| Tao Fei, Zhang Chen-yuan, Qi Qing-lin, et al. Digital twin maturity model[J].Computer Integrated Manufacturing Systems, 2022, 28(5): 1267-1281. | |
| [77] | 李鑫武, 陈雨轩, 丁华杰, 等. 基于仿真的自动驾驶影子模式数据采集[P]. 中国: CN202211178589.5, 2022-12-2. |
| [78] | Pfeffer R, Leichsenring T. Continuous development of highly automated driving functions with vehicle-in-the-loop using the example of Euro NCAP scenarios[C]∥The 7th Conference on Simulation and Testing for Vehicle Technology, Berlin, Germany, 2016: 33-42. |
| [79] | Tettamanti T, Szalai M, Vass S, et al. Vehicle-in-the-loop test environment for autonomous driving with microscopic traffic simulation[C]∥IEEE International Conference on Vehicular Electronics and Safety (ICVES), Madrid, Spain,2018: 1-6. |
| [80] | Weng B, Capito L, Ozguner U, et al. Towards guaranteed safety assurance of automated driving systems with scenario sampling: an invariant set perspective[J]. IEEE Transactions on Intelligent Vehicles,2021, 7(3): 638-651. |
| [81] | 武小倩, 李国玄, 冷露露. 自动驾驶汽车技术研究[J]. 汽车测试报告, 2023(5): 40-42. |
| Wu Xiao-qian, Li Guo-xuan, Leng Lu-lu. Research on autonomous vehicle technology[J]. Automobile Testing Report, 2023(5): 40-42. | |
| [82] | Koopman P, Wagner M. Challenges in autonomous vehicle testing and validation[J]. SAE International Journal of Transportation Safety, 2016, 4(1): 15-24. |
| [83] | Tumova J, Hall G C, Karaman S, et al. Least-violating control strategy synthesis with safety rules[C]∥Proceedings of The 16th International Conference on Hybrid Systems: Computation and Control, Marrakech, Morocco, 2013: 1-10. |
| [84] | Kress-Gazit H, Fainekos G E, Pappas G J. Temporal-logic-based reactive mission and motion planning[J]. IEEE Transactions on Robotics, 2009, 25(6): 1370-1381. |
| [85] | Fraichard T, Asama H. Inevitable collision states—a step towards safer robots? [J]. Advanced Robotics, 2004, 18(10): 1001-1024. |
| [86] | Chan N, Kuffner J, Zucker M. Improved motion planning speed and safety using regions of inevitable collision[C]∥The 17th CISM-IFToMM Symposium on Robot Design, Dynamics, and Control, Tokyo, Japan, 2008 :103-114. |
| [87] | Dahl J, de Campos G R, Olsson C, et al. Collision avoidance: a literature review on threat-assessment techniques[J]. IEEE Transactions on Intelligent Vehicles, 2018, 4(1): 101-113. |
| [88] | 聂隐愚. 数据驱动的车辆动力学建模与仿真研究[D]. 成都: 西南交通大学牵引动力国家实验室, 2016. |
| Nie Yin-yu. Research on data-driven vehicle dynamics modeling and simulation[D]. Chengdu: State Key Laboratory of Traction Power,Southwest Jiaotong University, 2016. | |
| [89] | 徐学进. 基于驾驶模拟器的车辆动力学建模研究[D].武汉: 武汉理工大学汽车工程学院, 2007. |
| Xu Xue-jin. Research on vehicle dynamics modeling based on driving simulator[D]. Wuhan: School of Automotive Engineering, Wuhan University of Technology, 2007. | |
| [90] | Huang H M, Pavek K, Albus J, et al. Autonomy levels for unmanned systems(ALFUS) framework: an update[J].Unmanned Ground Vehicle Technology VII,2005, 5804: 439-448. |
| [91] | 赵文博. 智能汽车行人避撞系统相机在环测试方法研究[D]. 长春: 吉林大学汽车工程学院, 2021. |
| Zhao Wen-bo. Research on camera-in-the-loop test method of pedestrian collision avoidance system for intelligent vehicles[D].Changchun: College of Automotive Engineering, Jilin University, 2021. | |
| [92] | 邢星飞, 翟洪涛, 郑英东, 等. 智能网联汽车毫米波雷达在环测试研究[J]. 汽车电器, 2022(6): 4-7. |
| Xing Xing-fei, Zhai Hong-tao, Zheng Ying-dong, et al. Hardware-in-the-loop testing of millimeter-wave radar for intelligent connected vehicles [J]. Automotive Electronics, 2022(6): 4-7. | |
| [93] | 马谦. 车辆V2X功能硬件在环仿真测试系统研究[J].上海汽车, 2023(4): 27-30. |
| Ma Qian. Hardware-in-the-loop simulation test system for V2X functions of vehicles [J]. Shanghai Automobile, 2023(4): 27-30. | |
| [94] | 夏宋鹏程, 裴凌, 朱一帆, 等. 基于GNSS硬件在环的多源融合定位高逼真仿真方法[J]. 中国惯性技术学报, 2020, 28(2): 8-12. |
| peng-cheng Xia-Song, Pei Ling, Zhu Yi-fan, et al. High-fidelity simulation method for multi-source fusion positioning based on GNSS hardware-in-the-loop [J]. Journal of China Inertial Technology, 2020, 28(2): 8-12. | |
| [95] | 呼啸. 应用ECU在环仿真的EPS系统嵌入式软件测试研究[D]. 长春:吉林大学汽车工程学院, 2012. |
| Hu Xiao. Research on embedded software testing of EPS system using ECU-in-the-loop simulation[D].Changchun: College of Automotive Engineering, Jilin University, 2012. | |
| [96] | Drolia U, Wang Z, Vemuri S, et al. Demo abstract: AutoPlug—an automotive test-bed for ECU testing, validation and verification[C]∥Proceedings of the 10th ACM/IEEE International Conference on Information Processing in Sensor Networks, Chicago, USA, 2011: 131-132. |
| [97] | Zhao T, Yurtsever E, Paulson J A, et al. Formal certification methods for automated vehicle safety assessment[J]. IEEE Transactions on Intelligent Vehicles, 2022,8(1): 232-249. |
| [98] | 卜磊, 解定宝. 混成系统形式化验证[J]. 软件学报, 2014, 25(2): 15-25. |
| Bu Lei, Xie Ding-bao. Formal verification of hybrid systems[J]. Journal of Software, 2014, 25(2): 15-25. | |
| [99] | Domenici A, Fagiolini A, Palmieri M. Integrated simulation and formal verification of a simple autonomous vehicle[C]∥Software Engineering and Formal Methods: SEFM 2017 Collocated Workshops: DataMod, FAACS, MSE, CoSim-CPS, and FOCLASA, Trento, Italy, 2017: 300-314. |
| [100] | 刘秉政, 曹凯, 马建军. 自主车辆行为决策的安全验证方法[J]. 山东理工大学学报: 自然科学版, 2011, 25(6): 7-10. |
| Liu Bing-zheng, Cao Kai, Ma Jian-jun. Safety verification method for behavior decision-making of autonomous vehicles [J]. Journal of Shandong University of Technology(Natural Science Edition), 2011, 25(6): 7-10. | |
| [101] | 张雅顺. 混合系统的形式验证方法及其应用[D].合肥:合肥工业大学电气与自动化工程学院, 2006. |
| Zhang Ya-shun. Formal verification method of hybrid system and its application[D].Hefei: School of Electrical Engineering and Automation, Hefei University of Technology, 2006. | |
| [102] | Mitchell I M. A toolbox of level set methods version 1.0[J]. Journal of Molecular Graphics & Modelling, 2004, 25(4): 442-454. |
| [103] | Kiran B R, Sobh I, Talpaert V, et al. Deep reinforcement learning for autonomous driving: a survey[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 23(6): 4909-4926. |
| [104] | Li L, Lin Y L, Cao D P, et al. Parallel learning-a new framework for machine learning[J]. Acta Automatica Sinica, 2017, 43(1): 1-8. |
| [105] | Ly A O, Akhloufi M. Learning to drive by imitation: an overview of deep behavior cloning methods[J]. IEEE Transactions on Intelligent Vehicles, 2020, 6(2): 195-209. |
| [106] | Ma Y, Wang Z, Yang H, et al. Artificial intelligence applications in the development of autonomous vehicles: a survey[J]. IEEE/CAA Journal of Automatica Sinica, 2020, 7(2): 315-329. |
| [107] | Chauhan N K, Singh K. A review on conventional machine learning vs deep learning[C]∥International Conference on Computing, Power and Communication Technologies(GUCON), Beijing, China, 2018: 347-352. |
| [108] | Sun C, Su L, Gu S, et al. Cross validation for CNN based affordance learning and control for autonomous driving[C]∥IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 2019: 1519-1524. |
| [109] | Al-Sharman M, Murdoch D, Cao D, et al. A sensorless state estimation for a safety-oriented cyber-physical system in urban driving: deep learning approach[J]. IEEE/CAA Journal of Automatica Sinica, 2020, 8(1): 169-178. |
| [110] | Ding W, Wang W, Zhao D. A multi-vehicle trajectories generator to simulate vehicle-to-vehicle encountering scenarios[C]∥International Conference on Robotics and Automation (ICRA), Montreal,Canada, 2019: 4255-4261. |
| [111] | Wang W, Ramesh A, Zhu J, et al. Clustering of driving encounter scenarios using connected vehicle trajectories[J]. IEEE Transactions on Intelligent Vehicles, 2020, 5(3): 485-496. |
| [112] | Krajewski R, Moers T, Nerger D, et al. Data-driven maneuver modeling using generative adversarial networks and variational autoencoders for safety validation of highly automated vehicles[C]∥The 21st International Conference on Intelligent Transportation Systems(ITSC), Maui, USA, 2018: 2383-2390. |
| [113] | Rowe J, Smith A, Pokorny B, et al. Toward automated scenario generation with deep reinforcement learning in GIFT[C]∥Proceedings of the Sixth Annual GIFT User Symposium,Orlando,USA, 2018: 65-74. |
| [114] | Littman M L. Reinforcement learning improves behaviour from evaluative feedback[J]. Nature, 2015, 521(7553): 445-451. |
| [115] | Li N, Oyler D W, Zhang M, et al. Game theoretic modeling of driver and vehicle interactions for verification and validation of autonomous vehicle control systems[J]. IEEE Transactions on Control Systems Technology, 2017, 26(5): 1782-1797. |
| [116] | Oyler D W, Yildiz Y, Girard A R, et al. A game theoretical model of traffic with multiple interacting drivers for use in autonomous vehicle development[C]∥American Control Conference (ACC), Boston, USA, 2016: 1705-1710. |
| [117] | Albaba B M, Yildiz Y. Driver modeling through deep reinforcement learning and behavioral game theory[J]. IEEE Transactions on Control Systems Technology, 2021, 30(2): 885-892. |
| [118] | Feng S, Feng Y, Sun H, et al. Testing scenario library generation for connected and automated vehicles, part Ⅱ: case studies[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 22(9):5635-5647. |
| [119] | Kang S, Guo H, Su P, et al. Ecsas: exploring critical scenarios from action sequence in autonomous driving[C]∥2023 IEEE 32nd Asian Test Symposium (ATS), Beijing, China, 2023: 1-6. |
| [120] | Humeniuk D, Khomh F, Antoniol G. Reinforcement learning informed evolutionary search for autonomous systems testing[J]. ACM Transactions on Software Engineering and Methodology, 2024, 33(8): 1-45. |
| [121] | Wang X, Zhang S, Peng H. Comprehensive safety evaluation of highly automated vehicles at the roundabout scenario[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(11): 20873-20888. |
| [122] | Lu C. Test scenario generation for autonomous driving systems with reinforcement learning[C]∥IEEE/ACM 45th International Conference on Software Engineering: Companion Proceedings(ICSE-Companion), Melbourne,Australia, 2023: 317-319. |
| [123] | Gao J, Li S, Tao C, et al. An approach to GUI test scenario generation using machine learning[C]∥ IEEE International Conference on Artificial Intelligence Testing(AITest), Newark, USA, 2022: 79-86. |
| [124] | Wachi A. Failure-scenario maker for rule-based agent using multi-agent adversarial reinforcement learning and its application to autonomous driving[J/OL].[2023-08-22]. |
| [125] | Ma Y, Sun C, Chen J, et al. Verification and validation methods for decision-making and planning of automated vehicles: a review[J]. IEEE Transactions on Intelligent Vehicles, 2022, 7(3): 480-498. |
| [126] | Niu H, Ren K, Xu Y, et al. (Re) 2H2O: Autonomous driving scenario generation via reversely regularized hybrid offline-and-online reinforcement learning[C]∥IEEE Intelligent Vehicles Symposium(IV), Anchorage, Alaska, USA, 2023 :1-8. |
| [127] | Behzadan V, Munir A. Adversarial reinforcement learning framework for benchmarking collision avoidance mechanisms in autonomous vehicles[J]. IEEE Intelligent Transportation Systems Magazine, 2019,13(2): 236-241. |
| [128] | Chen B, Chen X, Wu Q, et al. Adversarial evaluation of autonomous vehicles in lane-change scenarios[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 23(8): 10333-10342. |
| [129] | Erdogan A, Kaplan E, Leitner A, et al. Parametrized end-to-end scenario generation architecture for autonomous vehicles[C]∥The 6th International Conference on Control Engineering & Information Technology(CEIT),Hong Kong, China, 2018:1-6. |
| [130] | Pütz A, Zlocki A, Küfen J, et al. Database approach for the sign-off process of highly automated vehicles[C]∥25th International Technical Conference on the Enhanced Safety of Vehicles (ESV) National Highway Traffic Safety Administration, Detroit, Michigan, USA, 2017: 1-8. |
| [131] | Hsueh M C, Tsai T K, Iyer R K. Fault injection techniques and tools[J]. Computer, 1997,30(4): 75-82. |
| [132] | Juez G, Amparan E, Lattarulo R, et al. Early safety assessment of automotive systems using sabotage simulation-based fault injection framework[C]∥International Conference on Computer Safety, Reliability, and Security,Vienna, Austria, 2017: 255-269. |
| [133] | Fu Y, Terechko A, Bijlsma T, et al. A Retargetable Fault Injection Framework for Safety Validation of Autonomous Vehicles[M]. Hamburg:ICSA-C,2019:69-76. |
| [134] | Juez G, Amparan E, Lattarulo R, et al. Early safety assessment of automotive systems using sabotage simulation-based fault injection framework[C]∥International Conference on Computer Safety, Reliability, and Security, Vienna, Austria, 2017: 255-269 |
| [135] | Karunakaran D, Berrio JS, Worrall S, et al. Critical concrete scenario generation using scenario-based falsification[C]∥IEEE International Conference on Recent Advances in Systems Science and Engineering (RASSE), Tainan, China, 2022: 1-8. |
| [136] | Leung K, Schmerling E, Zhang M, et al. On infusing reachability-based safety assurance within planning frameworks for human-robot vehicle interactions[J]. The International Journal of Robotics Research, 2020, 39(10-11): 1326-1345. |
| [137] | Chen M, Tam Q, Livingston S C, et al. Signal temporal logic meets reachability: connections and applications[C]∥International Workshop on the Algorithmic Foundations of Robotics, Shenzhen, China, 2018:581-601. |
| [1] | Dang LU,Yan-ru SUO,Yu-hang SUN,Hai-dong WU. Estimation of tire camber and sideslip combined mechanical characteristics based on dimensionless expression [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(5): 1516-1524. |
| [2] | Wei-dong LI,Cao-yuan MA,Hao SHI,Heng CAO. An automatic driving decision control algorithm based on hierarchical reinforcement learning [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(5): 1798-1805. |
| [3] | Tao ZHANG,Huang-da LIN,Zhong-jun YU. Real-time rolling optimization control method for gearshift of hybrid electric vehicles [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(4): 1215-1224. |
| [4] | Yan-yan QIN,Teng-fei XIAO,Qin-zhong LUO,Bao-jie WANG. Car-following safety analysis and control strategy for foggy freeway [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(4): 1241-1249. |
| [5] | Zhen-jiang LI,Li WAN,Shi-rui ZHOU,Chu-qing TAO,Wei WEI. Dynamic estimation of operational risk of tunnel traffic flow based on spatial-temporal Transformer network [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(4): 1336-1345. |
| [6] | Zhao-xia LIU,Fui FU,Shi-feng NIU. Risk assessment in overtaking scenarios using extreme value theory and intelligent and connected information [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(3): 925-937. |
| [7] | Lan-fang ZHANG,Gen-ze LI,Ting-yu LIU,Bo YU. Mechanism and modeling of car⁃following behavior under local multi⁃vehicle influence [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(3): 963-973. |
| [8] | Dang LU,Xiao-fan WANG,Hai-dong WU. Analysis of uniform distribution characteristics of contact pressure of TWEEL tires [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(3): 811-819. |
| [9] | Jun-long QU,Wen-ku SHI,Sheng-yi XUAN,Zhi-yong CHEN. Parameter design method of multiple dynamic vibration absorbers for suppressing multi-frequency resonance of automotive powertrain [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(2): 444-455. |
| [10] | Yi-yong PAN,Yi-wen YOU,Jing-ting WU. Analysis of heterogeneity and transferability of factors influencing severity of lane change accidents [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(2): 520-528. |
| [11] | Xin CHEN,Xiang-yuan ZHANG,Zi-tao WU,Gui-shen YU,Li-fei YANG. Effect of process sequence on tensile shear properties of PFSSW joints for automotive aluminum sheets [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(2): 468-475. |
| [12] | Jun-nian WANG,Yu-jing CAO,Zhi-ren LUO,Kai-xuan LI,Wen-bo ZHAO,Ying-yi MENG. Online detection algorithm of road water depth based on binocular vision [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(1): 175-184. |
| [13] | Cao TAN,Hao-xin REN,Wen-qing GE,Ya-dong SONG,Jia-yu LU. Improved active disturbance rejection control for hydraulic vibration stages based on the direct-drive valve [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(1): 84-92. |
| [14] | Hong-yu HU,Zheng-guang ZHANG,You QU,Mu-yu CAI,Fei GAO,Zhen-hai GAO. Driver behavior recognition method based on dual-branch and deformable convolutional neural networks [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(1): 93-104. |
| [15] | Hong-zhi WANG,Ming-xuan SONG,Chao CHENG,Dong-xuan XIE. Road object detection method based on improved YOLOv5 algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(9): 2658-2667. |
|