吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (10): 2827-2836.doi: 10.13229/j.cnki.jdxbgxb.20221569
• 交通运输工程·土木工程 • 上一篇
高速公路货车换道冲突预测及其影响因素分析
温惠英( ),何梓琦,李秋灵,赵胜()
),何梓琦,李秋灵,赵胜()
- 华南理工大学 土木与交通学院,广州 510641
Traffic conflict prediction and influencing factors analysis of truck lane change on expressway
Hui-ying WEN(),Zi-qi HE,Qiu-ling LI,Sheng ZHAO()
- School of Civil Engineering and Transportation,South China University of Technology,Guangzhou 510641,China
摘要:
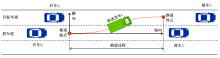
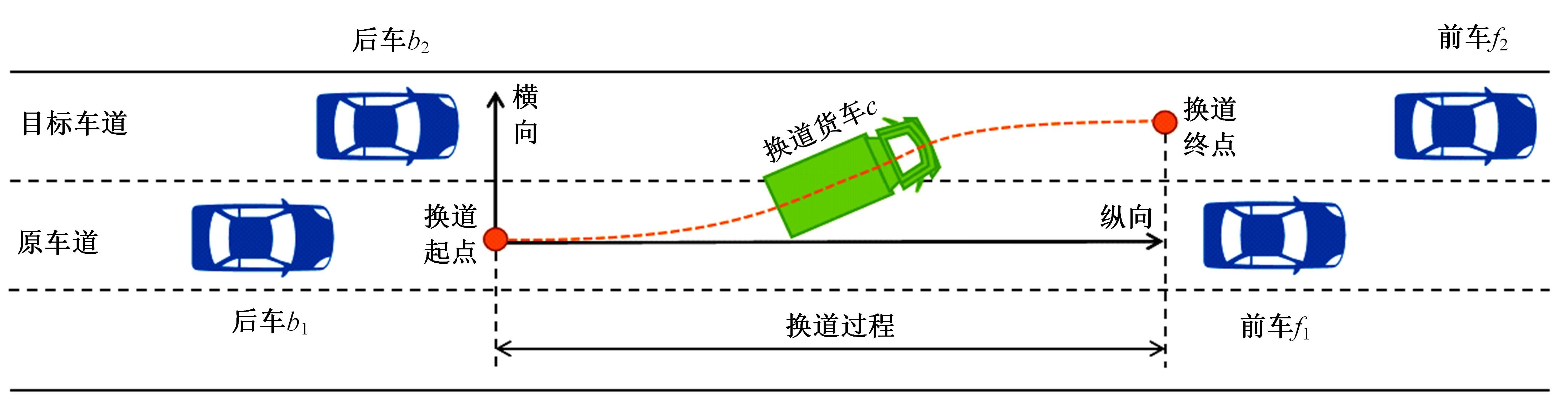
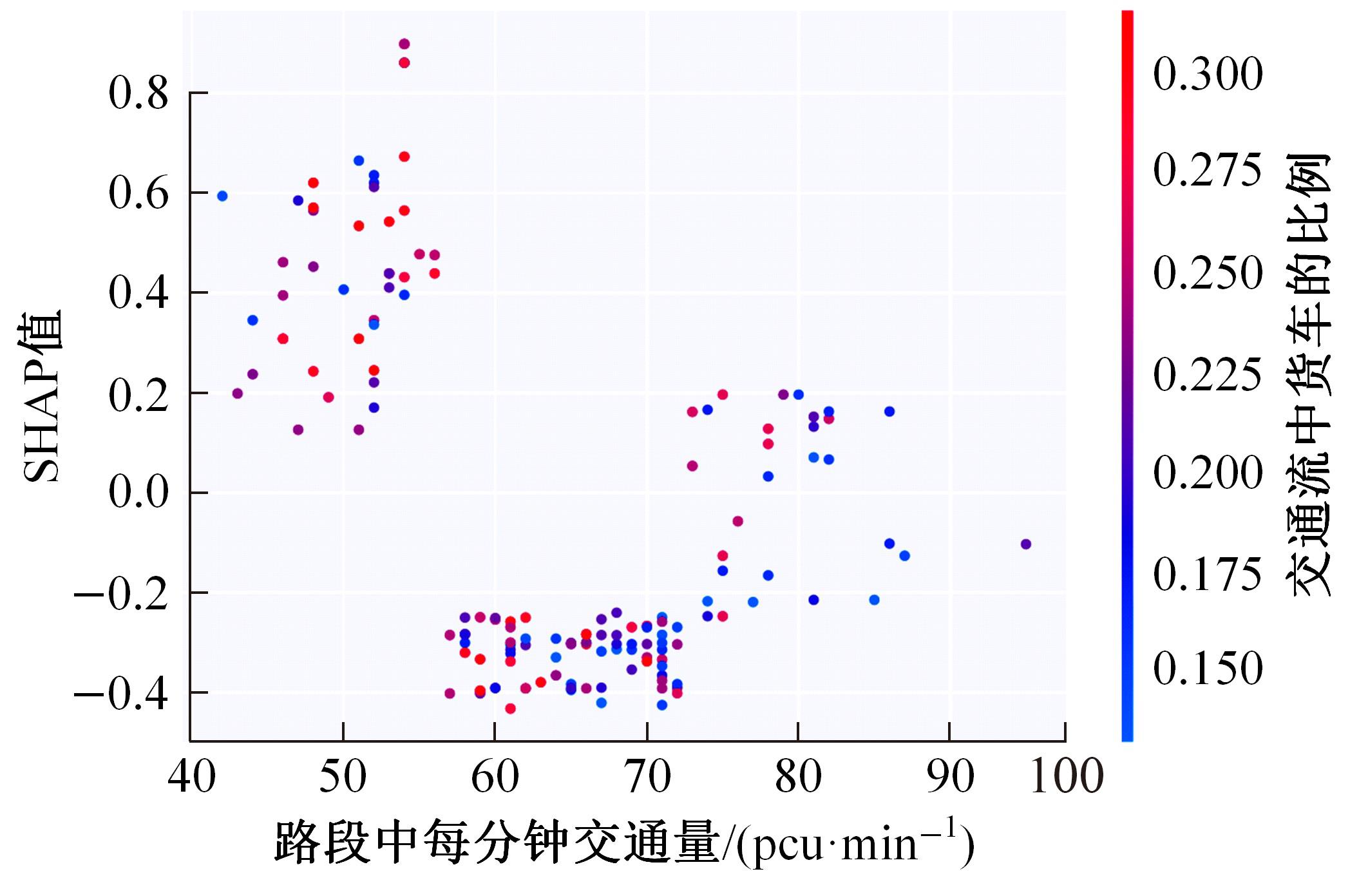
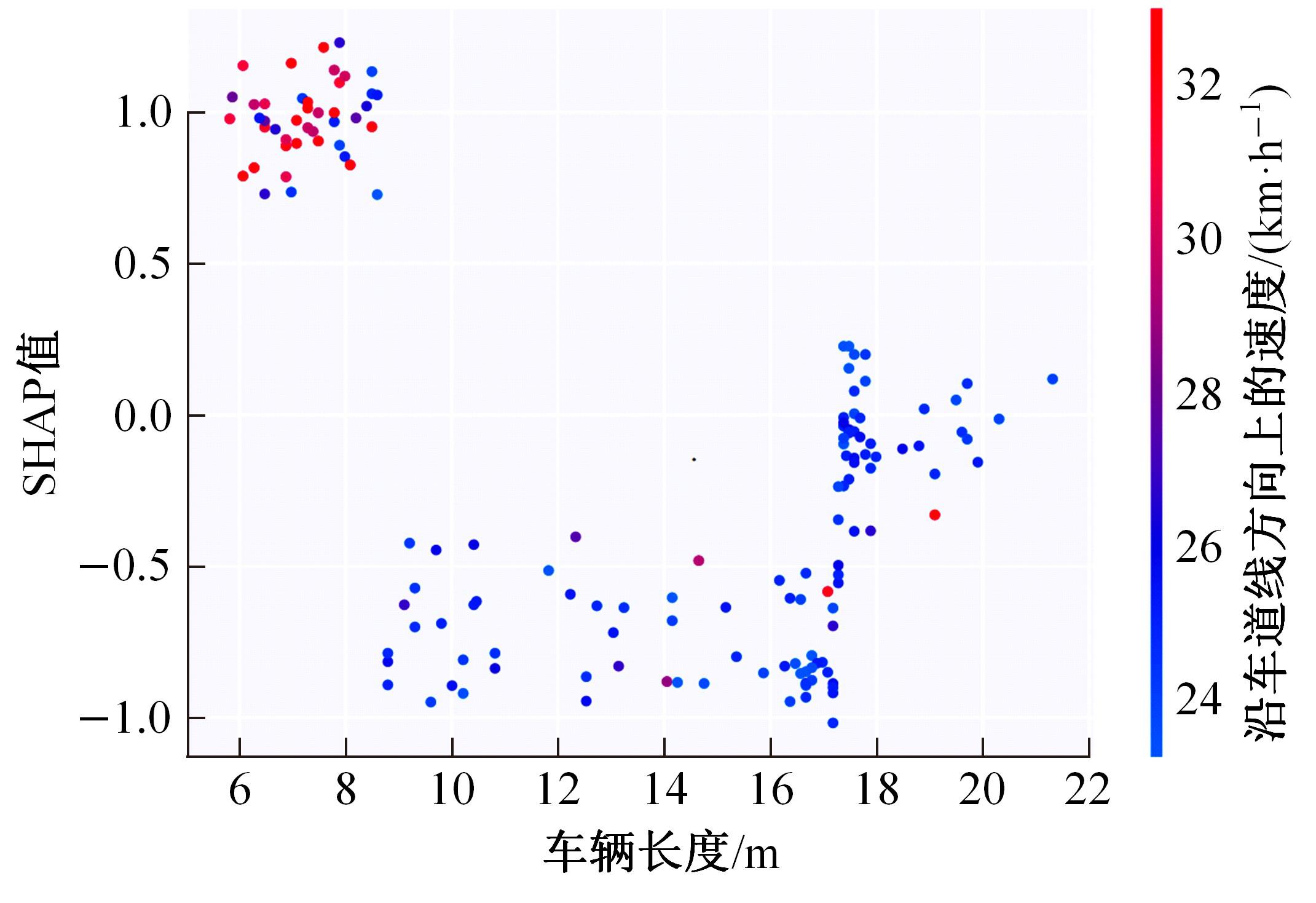
为研究高速公路上货车的换道冲突特性,降低高速公路货车的换道风险,本文对货车换道行为特征中引发交通冲突的显著因素进行了研究。首先综合考虑时间和空间维度的交通冲突度量指标,提出了货车交通冲突的判定指标,对高速公路上货车换道过程中的交通冲突样本进行了提取;其次基于XGBoost算法对货车换道冲突进行预测并与随机森林(RF)和梯度提升树(GBDT)算法的性能进行对比;最后利用SHAP算法研究了货车的换道特征、车辆间的相对运动状态和交通流因素对货车换道冲突的影响。研究表明:XGBoost模型的预测效果更优,该模型预测货车换道冲突的准确率和F1-score分别为83.87%和84.85%,且货车的换道安全性受原车道和目标车道前车运动状态的影响较大,冲突的发生与货车长度和路段每分钟的交通量呈负相关;在多因素交互影响下,当路段每分钟交通量大于70 pcu时,货车换道时发生冲突的概率随着交通流中货车比例的增加而增大;当车辆长度小于8 m时,货车发生冲突的可能性与沿车道线方向速度呈正相关。
中图分类号:
- U491.31






| 1 | 陈永恒, 王新慧, 曲昭伟, 等. 基于移动瓶颈交通波理论的上坡路段货车对客车干扰建模[J]. 吉林大学学报:工学版, 2014, 44(5): 1290-1295. |
| Chen Yong-heng, Wang Xin-hui, Qu Zhao-wei, et al. Modeling of buses interference with trucks based on kinematic wave theory of moving bottlenecks[J]. Journal of Jilin University(Engineering and Technology Edition), 2014, 44(5): 1290-1295. | |
| 2 | Ahmed M M, Franke R, Ksaibati K, et al. Effects of truck traffic on crash injury severity on rural highways in Wyoming using Bayesian binary logit models[J]. Accident Analysis & Prevention, 2018, 117: 106-113. |
| 3 | 胥川, 谢琨, 杨迪,等. 货车重量对事故严重程度的影响研究[J]. 交通运输工程与信息学报, 2019, 17(2): 10-15, 22. |
| Xu Chuan, Xie Kun, Yang Di, et al. Analysis the impact of truck weight levels on injury severity[J]. Journal of Transportation Systems Engineering and Information Technology, 2019, 17(2): 10-15, 22. | |
| 4 | Uddin M, Huynh N. Injury severity analysis of truck-involved crashes under different weather conditions[J]. Accident Analysis & Prevention, 2020, 141: No.105529. |
| 5 | 张驰, 胡涛, 侯宇迪,等. 基于制动毂温升的连续下坡货车事故风险评价模型[J]. 华南理工大学学报:自然科学版, 2020, 48(11): 19-29. |
| Zhang Chi, Hu Tao, Hou Yu-di, et al. Crash risk evaluation model based on brake heating for trucks under continuous downhill road conditions[J]. Journal of South China University of Technology(Natural Science Edition), 2020, 48(11): 19-29. | |
| 6 | Hyun K K, Jeong K, Tok A, et al. Assessing crash risk considering vehicle interactions with trucks using point detector data[J]. Accident Analysis & Prevention, 2019, 130: 75-83. |
| 7 | 戢晓峰, 耿昭师. 山区双车道公路货车碰撞预测的双变量冲突极值模型[J]. 交通运输系统工程与信息, 2022, 22(2): 230-238. |
| Ji Xiao-feng, Geng Zhao-shi. Bivariate traffic conflict extreme value model of truck collision prediction on two-lane mountain highway[J]. Journal of Transportation Systems Engineering and Information Technology, 2022, 22(2): 230-238. | |
| 8 | Doran J W, Linn D M. Proceedings of the first workshop on traffic conflicts[J]. Accident Analysis & Prevention, 1979, 11(4): 317-318. |
| 9 | 朱顺应, 蒋若曦, 王红, 等. 机动车交通冲突技术研究综述[J]. 中国公路学报, 2020, 33(2): 15-33. |
| Zhu Shun-ying, Jiang Ruo-xi, Wang Hong, et al. Review of research on traffic conflict techniques[J]. China Journal of Highway and Transport, 2020, 33(2): 15-33. | |
| 10 | Wu J, Wen H, Qi W. A new method of temporal and spatial risk estimation for lane change considering conventional recognition defects[J]. Accident Analysis & Prevention, 2020, 148: No.105796. |
| 11 | Oh C, Park S, Ritchie S G. A method for identifying rear-end collision risks using inductive loop detectors[J]. Accident Analysis & Prevention, 2006, 38(2): 295-301. |
| 12 | Son H D, Kweon Y J, Park B B. Development of crash prediction models with individual vehicular data[J]. Transportation Research Part C: Emerging Technologies, 2011, 19(6): 1353-1363. |
| 13 | Wu Y, Abdel-Aty M, Cai Q, et al. Developing an algorithm to assess the rear-end collision risk under fog conditions using real-time data[J]. Transportation Research Part C: Emerging Technologies, 2018, 87: 11-25. |
| 14 | Chen Q, Gu R, Huang H, et al. Using vehicular trajectory data to explore risky factors and unobserved heterogeneity during lane-changing[J]. Accident Analysis & Prevention, 2021, 151: No.105871. |
| 15 | Park H, Oh C, Moon J, et al. Development of a lane change risk index using vehicle trajectory data[J]. Accident Analysis & Prevention, 2018, 110: 1-8. |
| 16 | ISO. 2008-17387. Intelligent transport systems-lane change decision aid systems (LC )-Performance requirements and test procedures[S]. |
| 17 | Chen T, Guestrin C. XGBoost: a scalable tree boosting system[C]∥Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, USA, 2016: 785-794. |
| 18 | Breiman L. Random forests[J]. Machine Learning, 2001, 45(1): 5-32. |
| 19 | Friedman J H. Greedy function approximation: a gradient boosting machine[J]. Annals of Statistics, 2001, 29(5): 1189-1232. |
| 20 | Krajewski R, Bock J, Kloeker L, et al. The highD dataset: a drone dataset of naturalistic vehicle trajectories on German highways for validation of highly automated driving systems[C]∥IEEE International Conference on Intelligent Transportation Systems(ITSC),Maui, USA, 2018: 2118-2125. |
| 21 | , 公路路线设计规范 [S]. 北京:人民交通出版社, 2017. |
| 22 | . 收费公路车辆通行费车型分类 [S]. |
| 23 | Lundberg S M, Erion G G, Lee S I. Consistent individualized feature attribution for tree ensembles[J/OL].[2020-05-18]. arXiv preprint arXiv:, 2018. |
| [1] | 周荣贵,高沛,李雨璇,周建. 基于轨迹数据的高速公路小客车异常驾驶行为[J]. 吉林大学学报(工学版), 2024, 54(9): 2581-2587. |
| [2] | 何永明,权聪,魏堃,冯佳,万亚楠,陈世升. 超高速公路车路协同路侧单元感知融合方法[J]. 吉林大学学报(工学版), 2024, 54(7): 1923-1934. |
| [3] | 马庆禄,闫浩,聂振宇,李杨梅. 匝道合流区智能网联车辆协同控制方法[J]. 吉林大学学报(工学版), 2024, 54(5): 1332-1346. |
| [4] | 许清津,付锐,郭应时,吴付威. 载货汽车弯道侧翻路侧预测方法[J]. 吉林大学学报(工学版), 2024, 54(5): 1302-1310. |
| [5] | 蒲云,徐银,刘海旭,谭一帆. 考虑多车影响的智能网联车跟驰模型[J]. 吉林大学学报(工学版), 2024, 54(5): 1285-1292. |
| [6] | 曹倩,李志慧,陶鹏飞,李海涛,马永建. 面向交通事故检测及预防的异质传感器布设方法[J]. 吉林大学学报(工学版), 2024, 54(4): 969-978. |
| [7] | 赵晓华,刘畅,亓航,欧居尚,姚莹,郭淼,杨海益. 高速公路交通事故影响因素及异质性分析[J]. 吉林大学学报(工学版), 2024, 54(4): 987-995. |
| [8] | 邬岚,赵乐,李根. 基于方差异质性随机参数模型的汇合行为分析[J]. 吉林大学学报(工学版), 2024, 54(4): 883-889. |
| [9] | 张鑫,胡启洲,何君,吴啸宇. 考虑交通梗塞的合流区交通状况诊断[J]. 吉林大学学报(工学版), 2024, 54(2): 478-484. |
| [10] | 张卫华,刘嘉茗,解立鹏,丁恒. 网联混合环境快速路交织区自动驾驶车辆换道模型[J]. 吉林大学学报(工学版), 2024, 54(2): 469-477. |
| [11] | 徐进,陈正欢,廖祺硕,郑展骥,张河山. 基于心电数据的高速公路高密度互通立交驾驶负荷[J]. 吉林大学学报(工学版), 2024, 54(10): 2807-2818. |
| [12] | 潘义勇,吴静婷,缪炫烨. 老年驾驶员事故严重程度影响因素时间不稳定性分析[J]. 吉林大学学报(工学版), 2024, 54(10): 2819-2826. |
| [13] | 高海龙,徐一博,刘坤,李春阳,卢晓煜. 基于多源数据融合的高速公路路网短时交通流参数实时预测[J]. 吉林大学学报(工学版), 2024, 54(1): 155-161. |
| [14] | 杜筱婧,姚荣涵. 智能网联公交车出站强制换道的演化博弈机制[J]. 吉林大学学报(工学版), 2024, 54(1): 124-135. |
| [15] | 岳昊,张琦悦,杨子玉,任孟杰,张旭. 拥堵空间排队的静态交通流分配迭代加权算法[J]. 吉林大学学报(工学版), 2024, 54(1): 136-145. |
|
||