吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (1): 63-73.doi: 10.13229/j.cnki.jdxbgxb.20230331
具有输入缓冲的机械臂预设定有限时间跟踪控制
沈鹏1( ),李小华2(),刘辉2
),李小华2(),刘辉2
- 1.辽宁科技大学 应用技术学院,辽宁 鞍山 114051
2.辽宁科技大学 电子与信息工程学院,辽宁 鞍山 114051
Prescribed finite-time tracking control with input buffer for a manipulator system
Peng SHEN1(),Xiao-hua LI2(),Hui LIU2
- 1.School of Applied Technology,University of Science and Technology Liaoning,Anshan 114051,China
2.School of Electronic and Information Engineering,University of Science and Technology Liaoning,Anshan 114051,China
摘要:
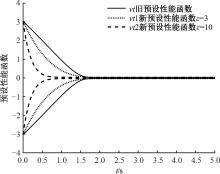
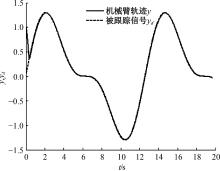
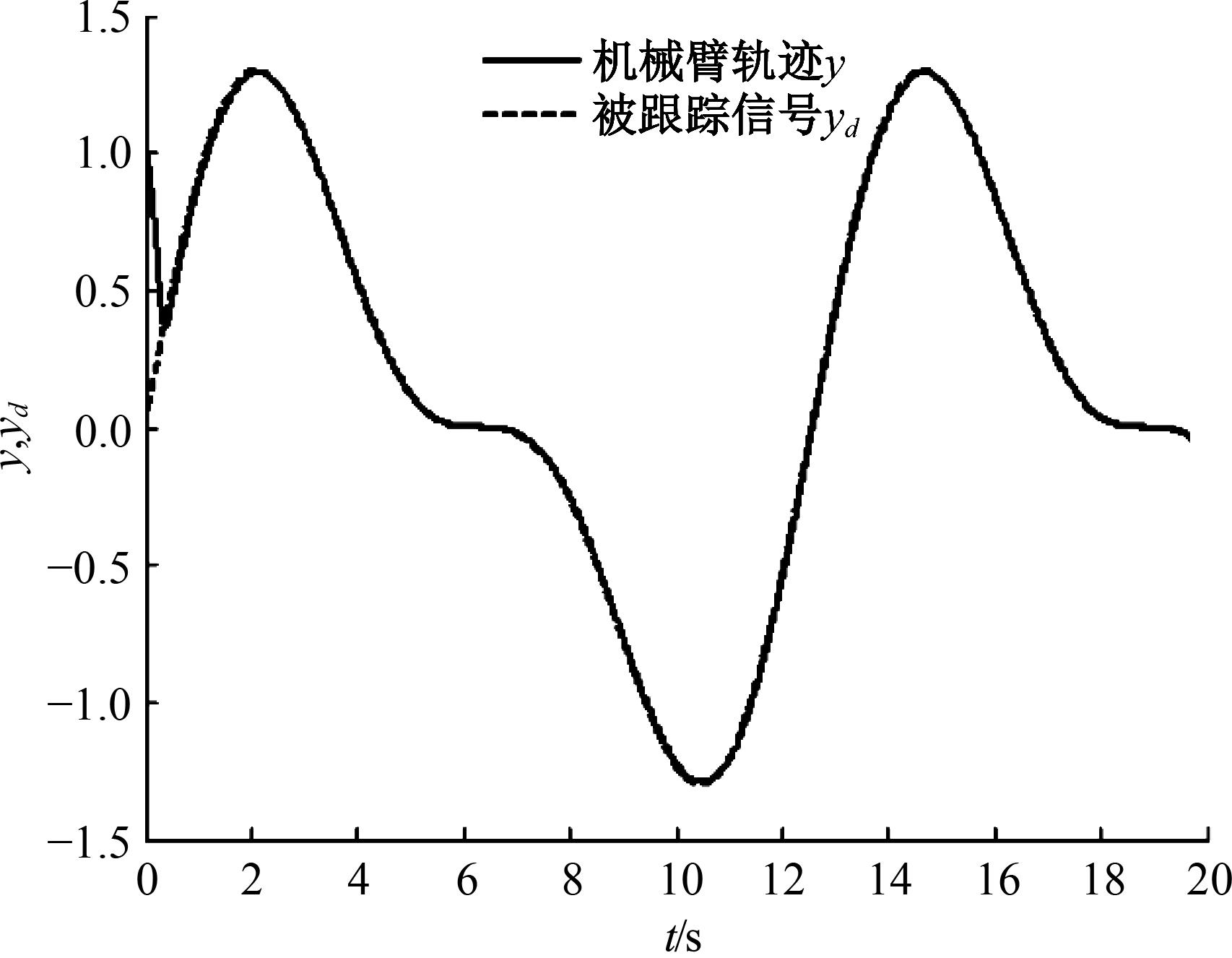
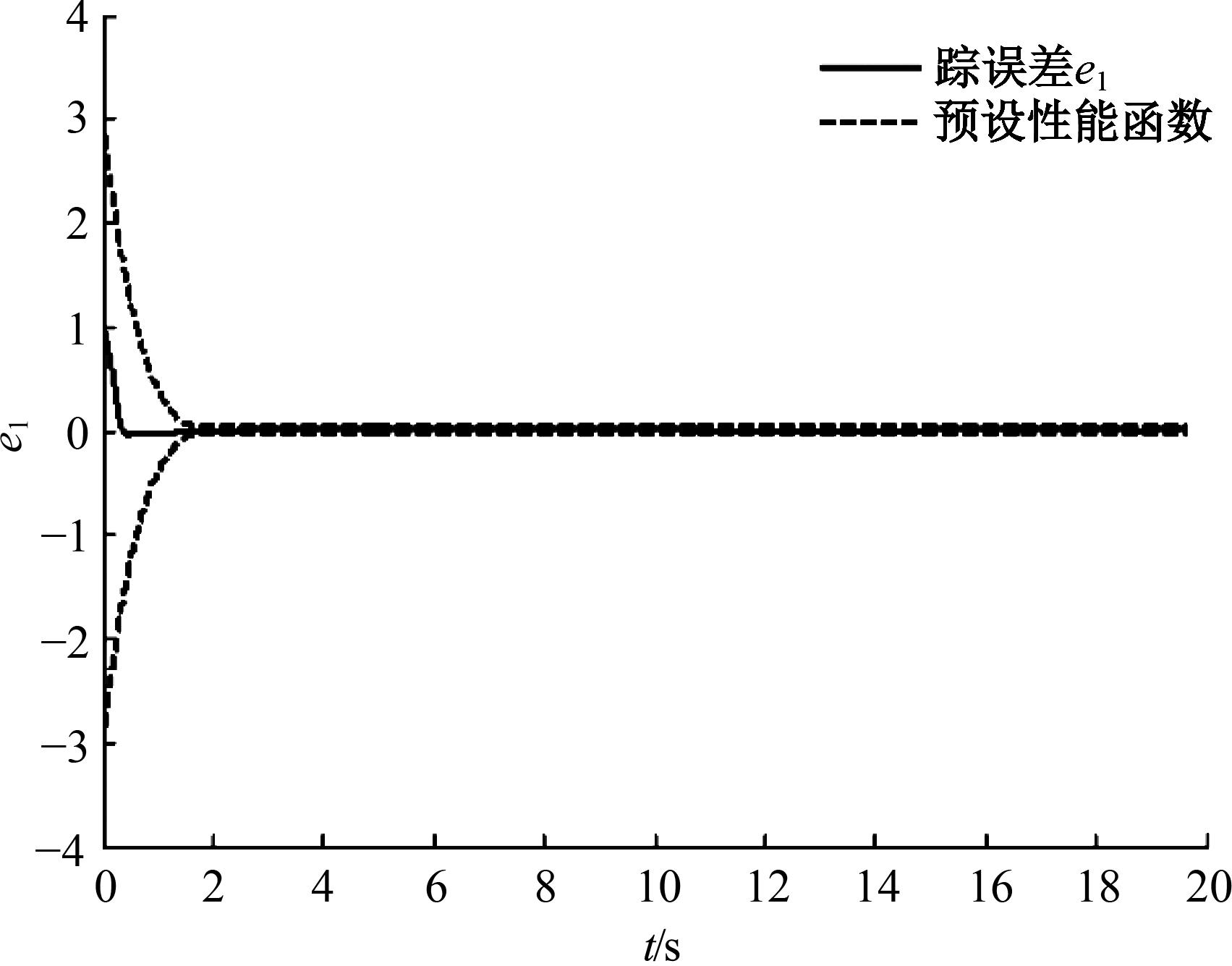
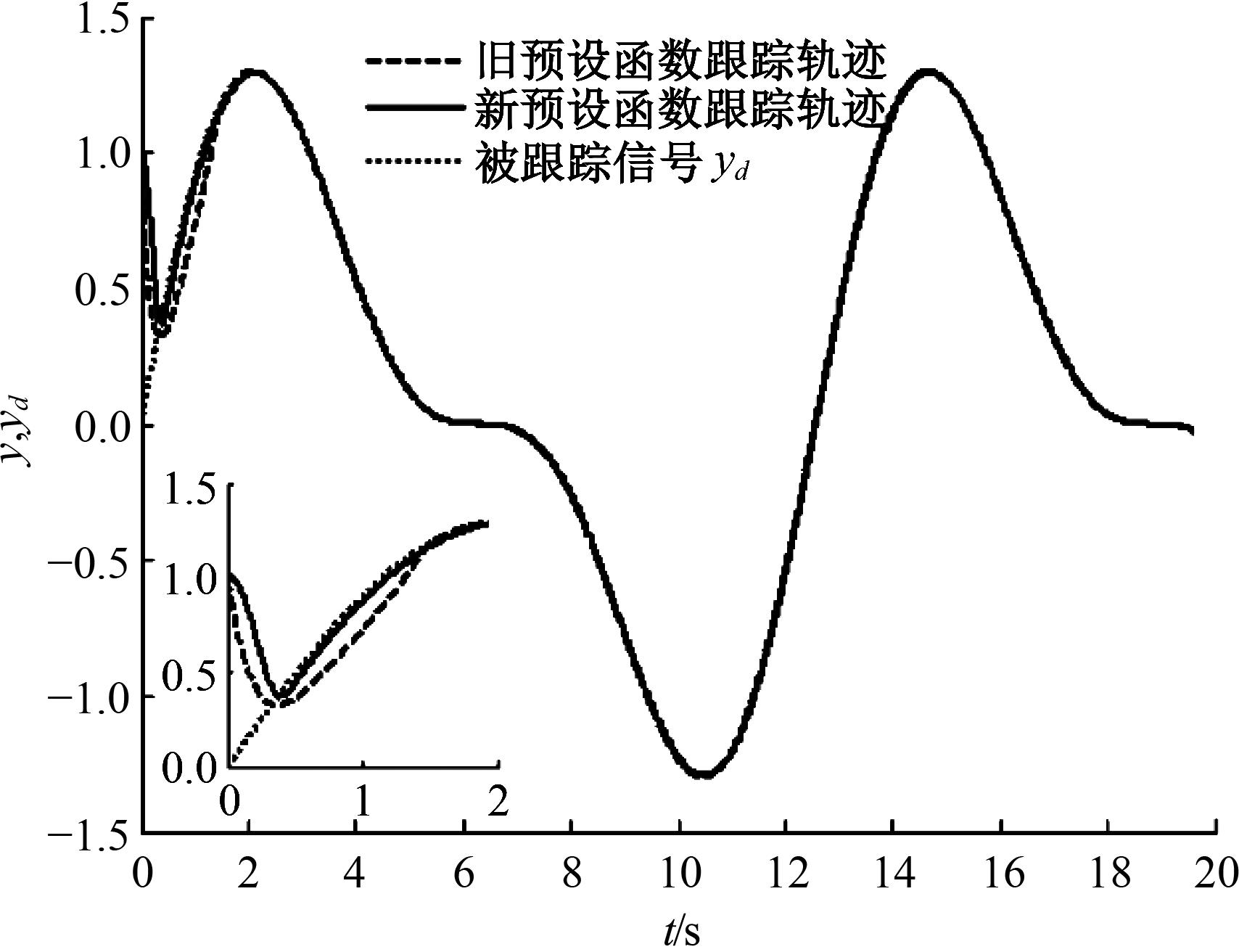
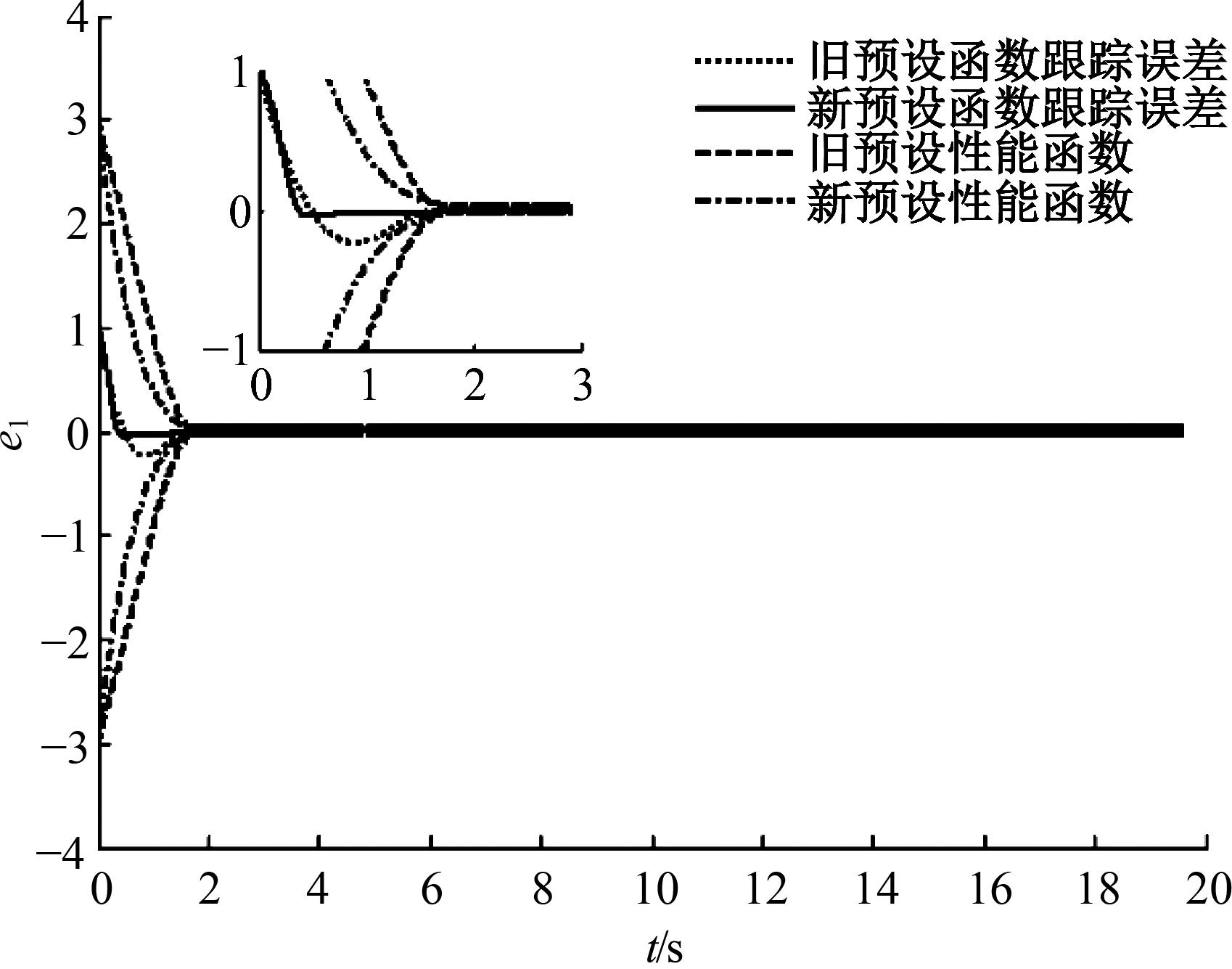
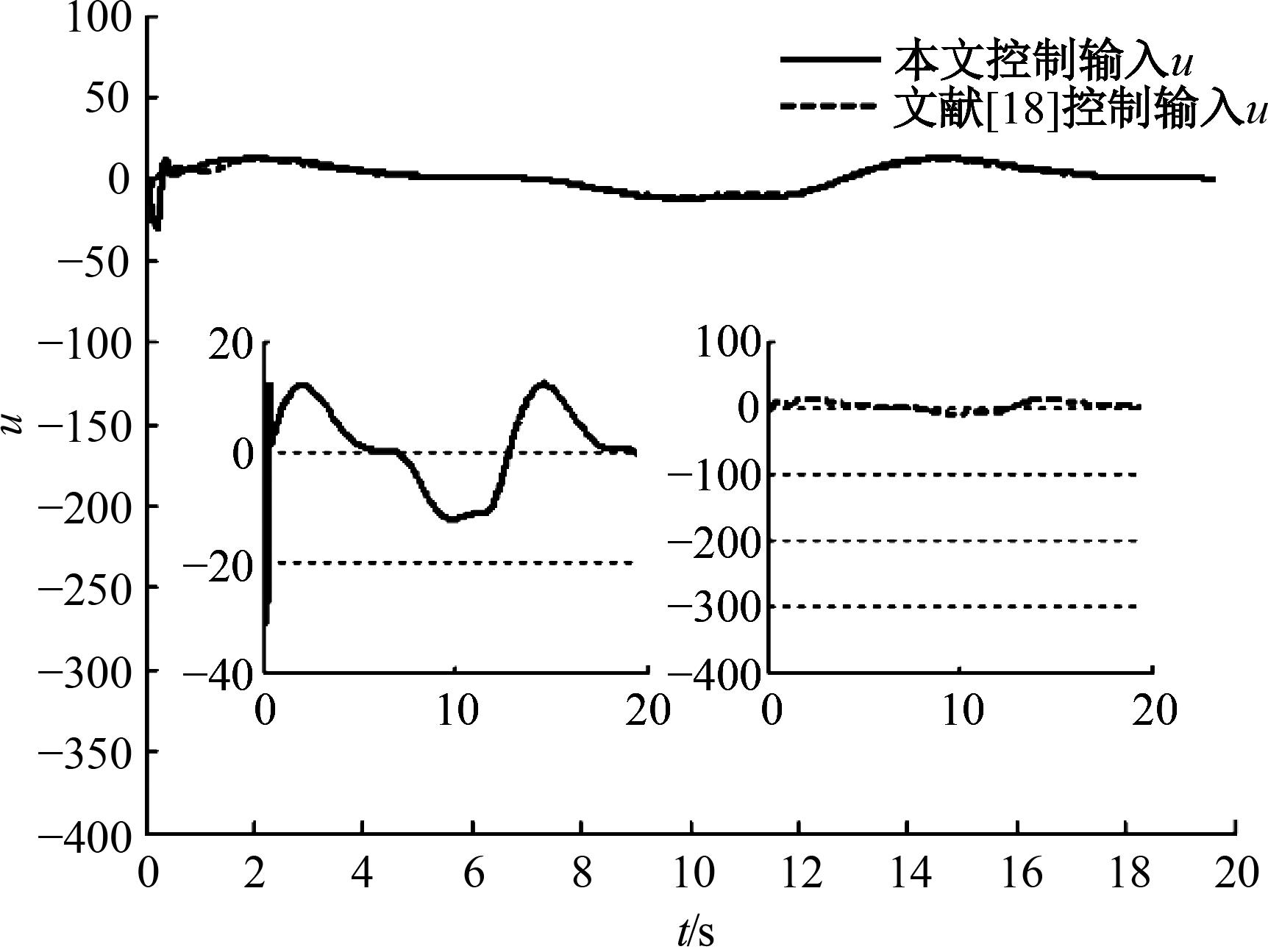
针对连杆机械臂系统具有输入缓冲的预设定有限时间轨迹跟踪控制问题,首先,应用反步法设计了系统的预设定有限时间轨迹跟踪控制器,提出了一种性能调节更加灵活的预设有限时间性能函数,借助该函数对轨迹跟踪误差进行约束控制律设计,可使机械臂轨迹跟踪控制过程在相同参数条件下获得比已有的预设有限时间性能函数更好的暂态性能。其次,设计了控制输入缓冲函数,既解决了机械臂初始位置误差过大造成控制输入过电压的问题,又解决了机械臂系统在重载情况下难以启动的问题。最后,仿真试验证明了本文控制器的有效性和优越性。
中图分类号:
- TP273

| 1 | Cervantes I, Alvarez-Ramirez J. On the PID tracking control of robot manipulators[J]. Systems & Control Letters, 2001, 42(1): 37-46. |
| 2 | Ayala H V H, Dos Santos Coelho L D. Tuning of PID controller based on a multiobjective genetic algorithm applied to a robotic manipulator[J]. Expert Systems with Applications, 2012, 39(10): 8968-8974. |
| 3 | Meza J L, Santibáñez V, Soto R, et al. Fuzzy self-tuning PID semiglobal regulator for robot manipulators[J]. IEEE Transactions on Industrial Electronics, 2011, 59(6): 2709-2717. |
| 4 | 吴爱国, 韩俊庆, 董娜. 基于极局部模型的机械臂自适应滑模控制[J]. 吉林大学学报: 工学版, 2020, 50(5): 1905-1912. |
| Wu Ai-guo, Han Jun-qing, Dong Na. Adaptive sliding mode control based on ultra⁃local model for robotic manipulator[J]. Journal of Jilin University (Engineering and Technology Edition), 2020, 50(5): 1905-1912. | |
| 5 | Slotine J J E, Li W. On the adaptive control of robot manipulators[J]. The International Journal of Robotics Research, 1987, 6(3): 49-59. |
| 6 | Lee M J, Choi Y K.An adaptive neurocontroller using RBFN for robot manipulators[J]. IEEE Transactions on Industrial Electronics, 2004, 51(3): 711-717. |
| 7 | 王伟, 赵健廷, 胡宽荣, 等. 基于快速非奇异终端滑模的机械臂轨迹跟踪方法[J]. 吉林大学学报: 工学版, 2020, 50(2): 464-471. |
| Wang Wei, Zhao Jian-ting, Hu Kuan-rong, et al. Trajectory tracking of robotic manipulators based on fast nonsingular terminal sliding mode[J]. Journal of Jilin University (Engineering and Technology Edition), 2020, 50(2): 464-471. | |
| 8 | Su H, Qi W, Chen J, et al. Fuzzy approximation-based task-space control of robot manipulators with remote center of motion constraint[J]. IEEE Transactions on Fuzzy Systems, 2022, 30(6): 1564-1573. |
| 9 | Zhang S, Dong Y, Ouyang Y, et al. Adaptive neural control for robotic manipulators with output constraints and uncertainties[J]. IEEE Transactions on Neural Networks and Learning Systems, 2018, 29(11): 5554-5564. |
| 10 | Izadbakhsh A, Khorashadizadeh S. Robust adaptive control of robot manipulators using Bernstein polynomials as universal approximator[J]. Journal of Robust and Nonlinear Control, 2020, 30(7): 2719-2735. |
| 11 | Yao W, Guo Y, Wu Y F, et al. Robust adaptive dynamic surface control of multi-link flexible joint manipulator with input saturation[J]. International Journal of Control, Automation and Systems, 2022, 20(2): 577-588. |
| 12 | Galicki M. Finite-time control of robotic manipulators[J]. Automatica, 2015, 51: 49-54. |
| 13 | Yang C, Jiang Y, Na J, et al. Finite-time convergence adaptive fuzzy control for dual-arm robot with unknown kinematics and dynamics[J]. IEEE Transactions on Fuzzy Systems, 2018, 27(3): 574-588. |
| 14 | Jia S, Shan J. Finite-time trajectory tracking control of space manipulator under actuator saturation[J]. IEEE Transactions on Industrial Electronics, 2019, 67(3): 2086-2096. |
| 15 | Doulgeri Z, Zoidi O. Prescribed performance regulation for robot manipulators[J]. IFAC Proceedings, 2009, 42(16): 573-578. |
| 16 | Guo Q, Zhang Y, Celler B G, et al. Neural adaptive backstepping control of a robotic manipulator with prescribed performance constraint[J]. IEEE Transactions on Neural Networks and Learning Systems, 2018, 30(12): 3572-3583. |
| 17 | An S Y, Chen M, Wang H Q, et al. Fast finite-time dynamic surface tracking control of a single-joint manipulator system with prescribed performance[J]. International Journal of Systems Science, 2021, 52(8): 1551-1563. |
| 18 | Liu Y, Liu X P, Jing Y W. Adaptive neural networks finite-time tracking control for non-strict feedback systems via prescribed performance[J]. Information Sciences, 2018, 468: 29-46. |
| 19 | 李小华, 胡利耀. 一类 p 规范型非线性系统预设性能有限时间 H∞ 跟踪控制[J]. 自动化学报, 2021, 47(12): 2870-2880. |
| Li Xiao-hua, Hu Li-yao. Prescribed performance finite-time H∞ tracking control for a class of p-normal form nonlinear systems[J]. Acta Automatica Sinica, 2021, 47(12): 2870-2880. | |
| 20 | Keljik J J. Electricity 4: AC/DC Motors, Controls, and Maintenance[M]. New York:Cengage Learn, 2013. |
| 21 | Zhang J X, Yang G H. Robust adaptive fault-tolerant control for a class of unknown nonlinear systems[J]. IEEE Transactions on Industrial Electronics, 2017, 64(1): 585-594. |
| 22 | Tang Z L, Ge S S, Tee K P, et al. Adaptive neural control for an uncertain robotic manipulator with joint space constraints[J]. International Journal of Control, 2016, 89(7): 1428-1446. |
| 23 | 李小华, 杨瑞芳, 刘辉, 等.一类机械臂系统自适应有限时间有界H∞跟踪控制[J]. 控制理论与应用, 2021, 38(1): 147-156. |
| Li Xiao-hua Yang Rui-fang, Liu Hui, et al. Adaptive finite-time bounded-H∞ tracking control for a class of manipulator system[J]. Control Theory & Applications, 2021, 38(1): 147-156. | |
| 24 | Zhang J X, Yang G H. Prescribed performance fault-tolerant control of uncertain nonlinear systems with unknown control directions[J]. IEEE Trans Autom Control, 2017, 62(12): 6529-6535. |
| 25 | Zhang J X, Yang G H.Robust adaptive fault-tolerant control for a class of unknown nonlinear systems[J]. IEEE Transactions on Industrial Electronics, 2017,64(1): 585-594. |
| 26 | Xing L, Wen C, Liu Z, et al. Event-triggered adaptive control for a class of uncertain nonlinear systems[J].IEEE Trans Autom Control, 2017,62(4): 2071-2076. |
| 27 | Xing L, Wen C, Liu Z, et al. Adaptive compensation for actuator failures with event-triggered input[J]. Automatica, 2017, 85: 129-136. |
| 28 | Huang Y, Liu Y. Practical tracking via adaptive event-triggered feedback for uncertain nonlinear systems[J]. IEEE Transactions on Automatic Control, 2019, 64(9): 3920-3927. |
| 29 | Kamali S, Tabatabaei S M, Arefi M M, et al. Prescribed performance quantized tracking control for a class of delayed switched nonlinear systems with actuator hysteresis using a filter-connected switched hysteretic quantizer[J]. IEEE Transactions on Neural Networks and Learning Systems, 2020, 33(1): 61-74. |
| 30 | Liu H, Li X. A prescribed-performance-based adaptive finite-time tracking control scheme circumventing the dependence on the system initial condition[J]. Applied Mathematics and Computation, 2023, 448: No.127912. |
| [1] | 田彦涛,庾文彦,季言实,谢波. 面向不同驾驶行为模型的共享控制器设计[J]. 吉林大学学报(工学版), 2024, 54(9): 2676-2686. |
| [2] | 鲜斌,王光怡,蔡佳明. 多无人机吊挂负载运输系统的非线性鲁棒控制设计[J]. 吉林大学学报(工学版), 2024, 54(6): 1788-1795. |
| [3] | 王宏志,王婷婷,兰淼淼,徐硕. 基于位置跟踪的机械臂多电机新型滑模控制策略[J]. 吉林大学学报(工学版), 2024, 54(5): 1443-1458. |
| [4] | 赵军,赵子亮,朱庆林,郭斌. 不依赖观测器的不确定性系统输出反馈鲁棒控制[J]. 吉林大学学报(工学版), 2024, 54(3): 828-835. |
| [5] | 张延安,杜岳峰,孟青峰,栗晓宇,刘磊,朱忠祥. 基于改进遗传算法的湿式离合器压力自适应控制[J]. 吉林大学学报(工学版), 2024, 54(3): 852-864. |
| [6] | 侯胜杰,汪忠来,智鹏鹏,郑皓,徐璟. 考虑模型-环境不确定性的仿生飞行器轨迹跟踪控制[J]. 吉林大学学报(工学版), 2024, 54(12): 3699-3710. |
| [7] | 张刘,曾庆铭,赵寰宇,范国伟. 基于Lyapunov理论的卫星大挠性太阳能帆板分布式自适应振动抑制控制方法[J]. 吉林大学学报(工学版), 2023, 53(9): 2676-2685. |
| [8] | 王艳敏,张伟琦,段广鑫,葛杨. 电子节气门的连续非奇异终端滑模控制[J]. 吉林大学学报(工学版), 2023, 53(7): 2127-2135. |
| [9] | 齐国元,李阔,王琨. 基于补偿函数观测器的四旋翼无人机姿态受限控制[J]. 吉林大学学报(工学版), 2023, 53(3): 853-862. |
| [10] | 郭洪艳,于文雅,刘俊,戴启坤. 复杂场景智能车辆车道与速度一体化滚动优化决策[J]. 吉林大学学报(工学版), 2023, 53(3): 693-703. |
| [11] | 王德军,张凯然,徐鹏,顾添骠,于文雅. 基于车辆执行驱动能力的复杂路况速度规划及控制[J]. 吉林大学学报(工学版), 2023, 53(3): 643-652. |
| [12] | 徐卓君,王耀祥,黄兴,彭程. 多无人机地面移动目标搜寻和定位[J]. 吉林大学学报(工学版), 2023, 53(3): 832-840. |
| [13] | 何德峰,周丹,罗捷. 跟随式车辆队列高效协同弦稳定预测控制[J]. 吉林大学学报(工学版), 2023, 53(3): 726-734. |
| [14] | 齐国元,陈浩. 基于观测器的四旋翼控制-抗扰-避障一体化[J]. 吉林大学学报(工学版), 2023, 53(3): 810-822. |
| [15] | 陈珑茏,冯天宇,吕宗阳,吴玉虎. 共轴倾转旋翼无人机有限时间滑模姿态控制[J]. 吉林大学学报(工学版), 2023, 53(3): 883-890. |
|
||