吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (7): 2127-2135.doi: 10.13229/j.cnki.jdxbgxb.20210988
• 通信与控制工程 • 上一篇
电子节气门的连续非奇异终端滑模控制
王艳敏( ),张伟琦,段广鑫,葛杨
),张伟琦,段广鑫,葛杨
- 哈尔滨工业大学 电气工程及自动化学院,哈尔滨 150001
Continuous non-singular terminal sliding mode control of electronic throttle
Yan-min WANG(),Wei-qi ZHANG,Guang-xin DUAN,Yang GE
- School of Electrical Engineering and Automation,Harbin Institute of Technology,Harbin 150001,China
摘要:
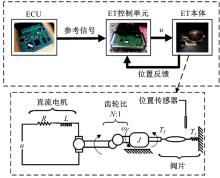
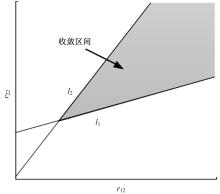
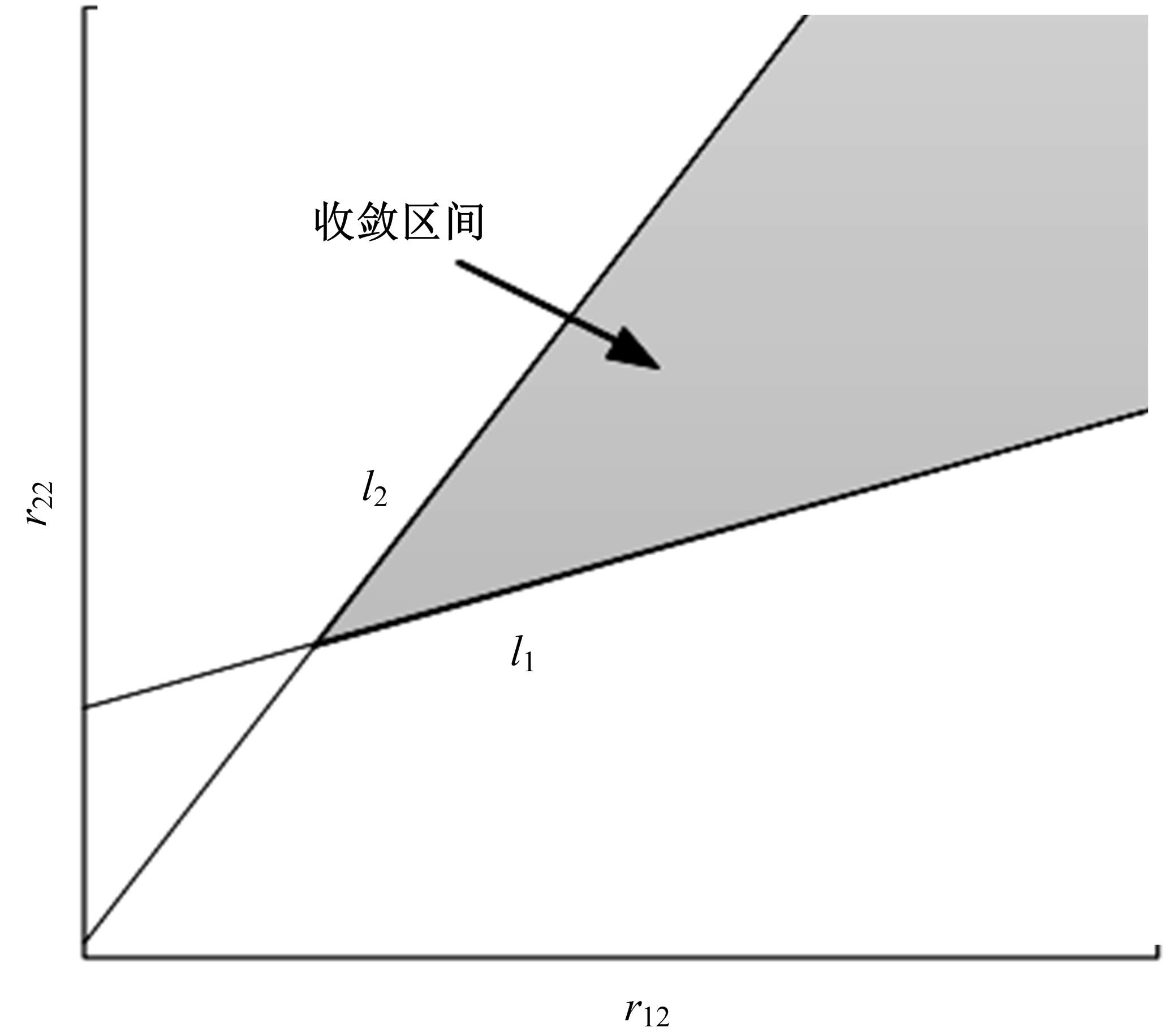
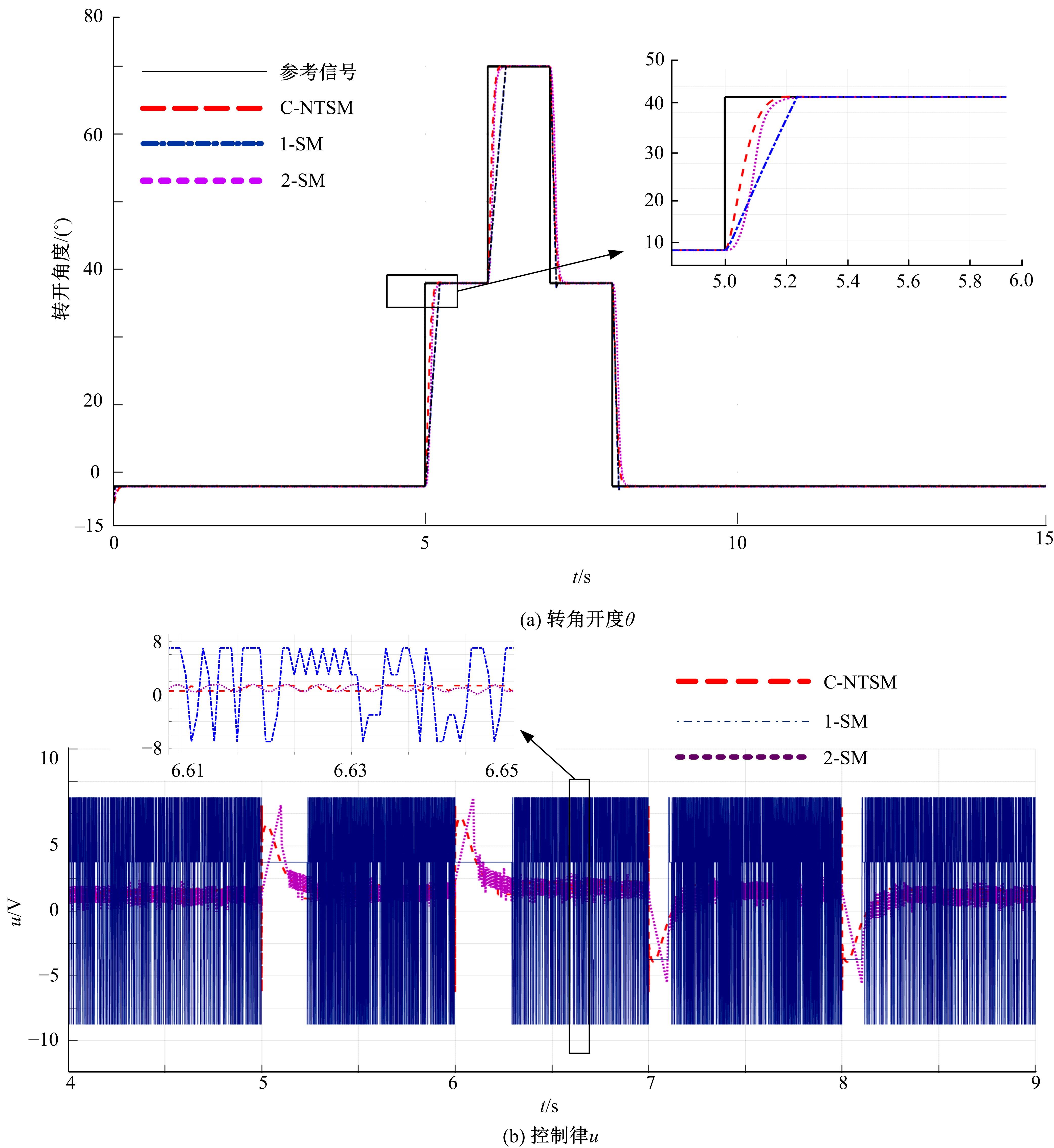
针对电子节气门的转角开度控制,为克服传统滑模控制存在的抖振问题及信号微分难以直接求取问题,提出一种新型的连续非奇异终端滑模控制方法。建立电子节气门系统的数学模型,从滑模面和控制律两方面改进节气门的控制性能,即在滑模面设计过程中,有目的地引入系统状态的幂指数项,以保证系统的全局有限时间收敛,并去除传统终端滑模对控制器参数选取的约束条件。在控制律设计过程中,引入低通滤波环节,在保证系统稳定性条件下,推导出其连续控制律,并解决了状态变量微分求取的问题。通过与传统一阶和二阶滑模的理论和仿真性能对比,证明本文方法在抖振抑制、响应速度、控制精度方面的优越性。
中图分类号:
- TP273


| 1 | Yang B, Liu M, Hakil K, et al. Luenberger-sliding mode observer based fuzzy double loop integral sliding mode controller for electronic throttle valve[J]. Journal of Process Control, 2018, 61: 36-46. |
| 2 | Ashok B, Kumar C R. Trends and future perspectives of electronic throttle control system in a spark ignition engine[J]. Annual Reviews in Control, 2018, 93(4): 1923-1931. |
| 3 | 白锐, 王胜贤, 王贺彬. 汽车电子节气门的建模及滑模控制[J]. 控制工程, 2019, 26(7): 1384-1390. |
| Bai Rui, Wang Sheng-xian, Wang He-bin. Modeling and sliding-mode control for the automotive electronic throttle[J]. Control Engineering of China, 2019, 26(7): 1384-1390. | |
| 4 | Xavier N, Bandyopadhyay B. Practical sliding mode using state depended intermittent control[J]. IEEE Transactions on Circuits and Systems II: Express Briefs, 2021, 68(1): 341-345. |
| 5 | Song J, Huang L, Karimi R, et al. ADP-based security decentralized sliding mode control for partially unknown large-scale systems under injection attacks[J]. IEEE Transactions on Circuits and Systems, 2020, 67(12): 5290-5301. |
| 6 | Wang H, Shi L, Man Z, et al. Continuous fast nonsingular terminal sliding mode control of automotive electronic throttle systems using finite-time exact observer[J]. IEEE Transactions on Industrial Electronics, 2018, 65(9): 7160-7172. |
| 7 | Junejo A, Xu W, Mu C, et al. Adaptive speed control of PMSM drive system based a new sliding-mode reaching law[J]. IEEE Transactions on Power Electronics, 2020, 35(11): 12110-12121. |
| 8 | Shao K, Zheng J, Huang K, et al. Finite-time control of a linear motor positioner using adaptive recursive terminal sliding mode[J]. IEEE Transactions on Industrial Electronics, 2020, 67(8): 6659-6668. |
| 9 | Abrazeh S, Mohseni S R, Gheisarnejad M. Non-singular terminal sliding mode control with ultra-local model and single input interval Type-2 fuzzy logic control for pitch control of wind turbines[J]. IEEE/CAA Journal of Automatica Sinica, 2021, 8(3): 690-700. |
| 10 | Tuan A, Kang H. An adaptive terminal sliding mode control for robot manipulators with non-singular terminal sliding surface variables[J]. IEEE Access, 2019, 7: 8701-8712. |
| 11 | Nguyen V C, Vo A T, Kang Hee-jun. A Non-singular fast terminal sliding mode control based on third-order sliding mode observer for a class of second-order uncertain nonlinear systems and its application to robot manipulators[J]. IEEE Access, 2016, 64(8): 78109-78120. |
| 12 | Ge Y, Wang Y, Ying Z. Observer-based non-singular terminal sliding mode control of boost converters[C]//The 39th Chinese Control Conference, Shenyang, China, 2020: 2096-2100. |
| 13 | Yang Y, Yan Y. Back stepping sliding mode control for uncertain strict-feedback nonlinear systems using neural network-based adaptive gain scheduling[J]. Journal of Systems Engineering and Electronics, 2018, 29(3): 580-586. |
| 14 | 冯勇, 包晟, 余星火. 非奇异终端滑模控制系统的设计方法[J]. 控制与决策, 2002, 17(2): 194-198. |
| Feng Yong, Bao Sheng, Yu Xing-huo. Design method of non-singular terminal sliding mode control system[J]. Control and Decision, 2002, 17(2): 194-198. | |
| 15 | Hu Y, Huang H, He S. Adaptive tracking control of an electronic throttle valve based on recursive terminal sliding mode[J]. IEEE Transactions on Vehicular Technology, 2021, 70(1): 251-262. |
| 16 | Sun Z, Jiao X, Xue J. Prescribed performance control based on PSO identification and disturbance observer for automotive electronic throttle system with actuator constraint[J]. Control Engineering and Applied Informatics, 2020, 22(1): 24-31. |
| 17 | Bartolini G, Pisano A, Punta E, etal. A survey of applications of second order sliding mode control to mechanical systems[J]. International Journal of Control, 2003, 76(9): 875-892. |
| 18 | Markus R, Martin H. Application of higher order sliding-mode concepts to a throttle actuator for gasoline engines[J]. IEEE Transactions on Industrial Electronics, 2019, 56(9): 3322-3329. |
| 19 | Pavkovic D, Deur J, Jansz M. Self-tuning control of an electronic throttle[C]//IEEE Conference on Control Applications (CCC), Istanbul, Turkey, 2003: 149-154. |
| 22 | Jim M, Lee J, Ahn K K. Continuous nonsingular terminal sliding mode control of shape memory alloy actuators using time delay estimation[J]. IEEE Transactions on Mechatronics, 2015, 20(2): 899-909. |
| [1] | 汪少华,储堃,施德华,殷春芳,李春. 基于有限时间扩张状态观测的HEV鲁棒复合协调控制[J]. 吉林大学学报(工学版), 2023, 53(5): 1272-1281. |
| [2] | 何德峰,周丹,罗捷. 跟随式车辆队列高效协同弦稳定预测控制[J]. 吉林大学学报(工学版), 2023, 53(3): 726-734. |
| [3] | 徐卓君,王耀祥,黄兴,彭程. 多无人机地面移动目标搜寻和定位[J]. 吉林大学学报(工学版), 2023, 53(3): 832-840. |
| [4] | 齐国元,李阔,王琨. 基于补偿函数观测器的四旋翼无人机姿态受限控制[J]. 吉林大学学报(工学版), 2023, 53(3): 853-862. |
| [5] | 于雅静,郭健,王荣浩,秦伟,宋明武,向峥嵘. 基于状态观测器的多四旋翼无人机时变编队控制[J]. 吉林大学学报(工学版), 2023, 53(3): 871-882. |
| [6] | 王德军,张凯然,徐鹏,顾添骠,于文雅. 基于车辆执行驱动能力的复杂路况速度规划及控制[J]. 吉林大学学报(工学版), 2023, 53(3): 643-652. |
| [7] | 郭洪艳,于文雅,刘俊,戴启坤. 复杂场景智能车辆车道与速度一体化滚动优化决策[J]. 吉林大学学报(工学版), 2023, 53(3): 693-703. |
| [8] | 陈珑茏,冯天宇,吕宗阳,吴玉虎. 共轴倾转旋翼无人机有限时间滑模姿态控制[J]. 吉林大学学报(工学版), 2023, 53(3): 883-890. |
| [9] | 齐国元,陈浩. 基于观测器的四旋翼控制-抗扰-避障一体化[J]. 吉林大学学报(工学版), 2023, 53(3): 810-822. |
| [10] | 胡广地,景浩,李丞,冯彪,刘晓东. 基于高阶燃料电池模型的多目标滑模控制[J]. 吉林大学学报(工学版), 2022, 52(9): 2182-2191. |
| [11] | 张冲,胡云峰,宫洵,孙耀. 燃料电池阴极流量无模型自适应滑模控制器设计[J]. 吉林大学学报(工学版), 2022, 52(9): 2085-2095. |
| [12] | 王骏骋,吕林峰,李剑敏,任洁雨. 分布驱动电动汽车电液复合制动最优滑模ABS控制[J]. 吉林大学学报(工学版), 2022, 52(8): 1751-1758. |
| [13] | 杨国俊,田骐玮,吕明航,杜永峰,唐光武,韩宗健,伏一多. 大跨度悬索桥隧道式锚碇力学特性研究综述[J]. 吉林大学学报(工学版), 2022, 52(6): 1245-1263. |
| [14] | 时成林,王勇,吴春利,宋文祝. 路堤挡土墙主动土压力计算方法修正[J]. 吉林大学学报(工学版), 2022, 52(6): 1394-1403. |
| [15] | 姚玉权,仰建岗,高杰,宋亮. 基于性能-费用模型的厂拌再生沥青混合料优化设计[J]. 吉林大学学报(工学版), 2022, 52(3): 585-595. |
|
||