吉林大学学报(工学版) ›› 2019, Vol. 49 ›› Issue (6): 1977-1985.doi: 10.13229/j.cnki.jdxbgxb20180636
新的6⁃PSS型并联机构正向运动学求解方法
谢志江1( ),王昆1,皮阳军1,吴小勇2,郭映位1
),王昆1,皮阳军1,吴小勇2,郭映位1
- 1. 重庆大学 机械传动国家重点实验室, 重庆 400044
2. 重庆理工大学 机械工程学院, 重庆 400054
Novel method for forward kinematics of 6⁃PSSparallel manipulator
Zhi-jiang XIE1(),Kun WANG1,Yang-jun PI1,Xiao-yong WU2,Ying-wei GUO1
- 1. State Key Laboratory of Mechanical Transmission, Chongqing University, Chongqing 400044, China
2. College of Mechanical Engineering, Chongqing University of Technology, Chongqing 400054, China
摘要:
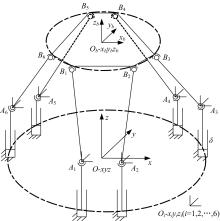
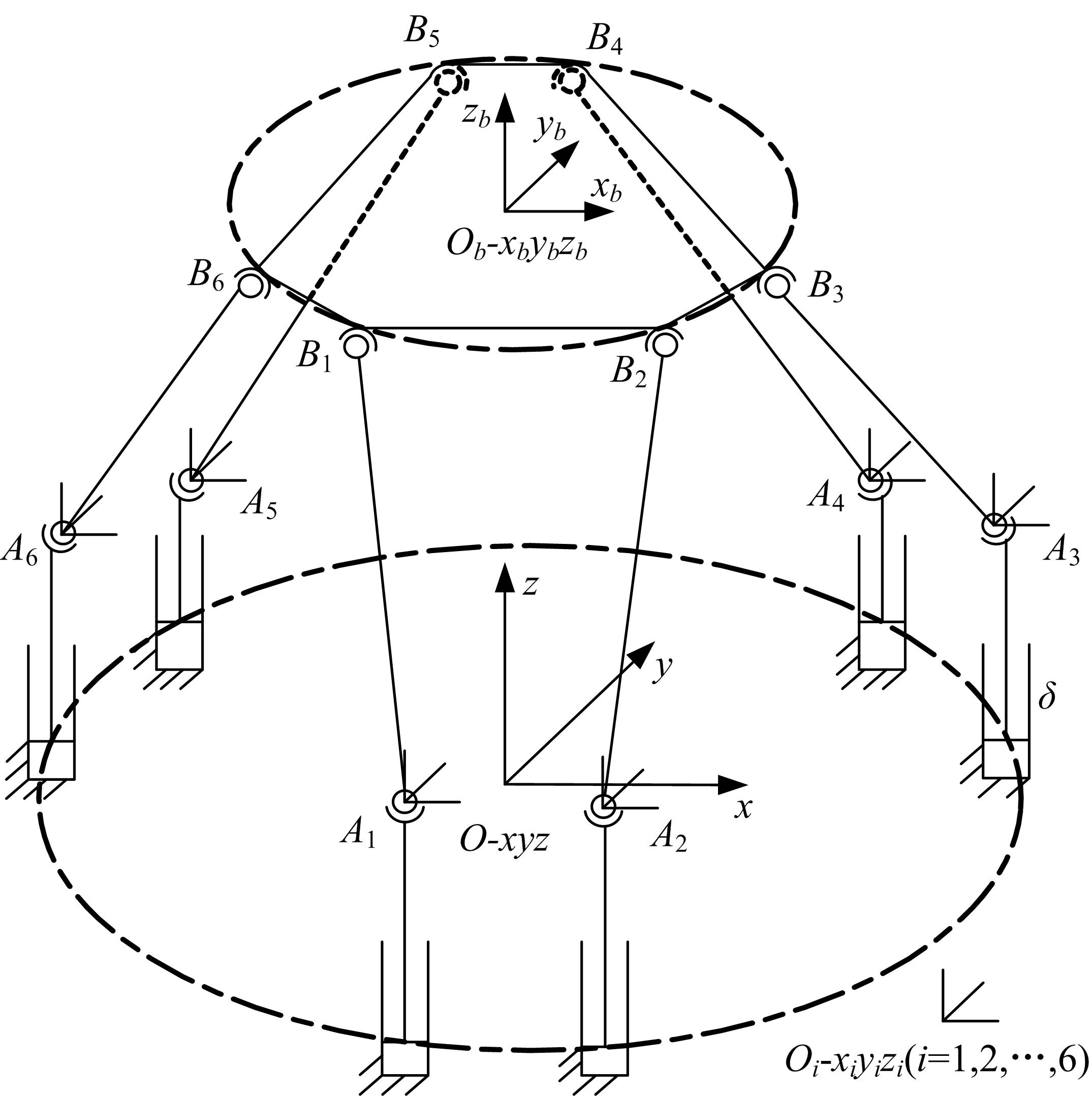
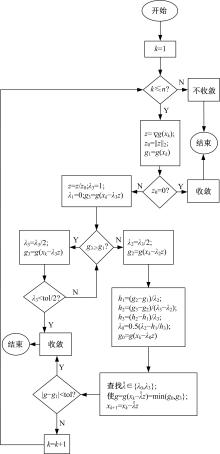
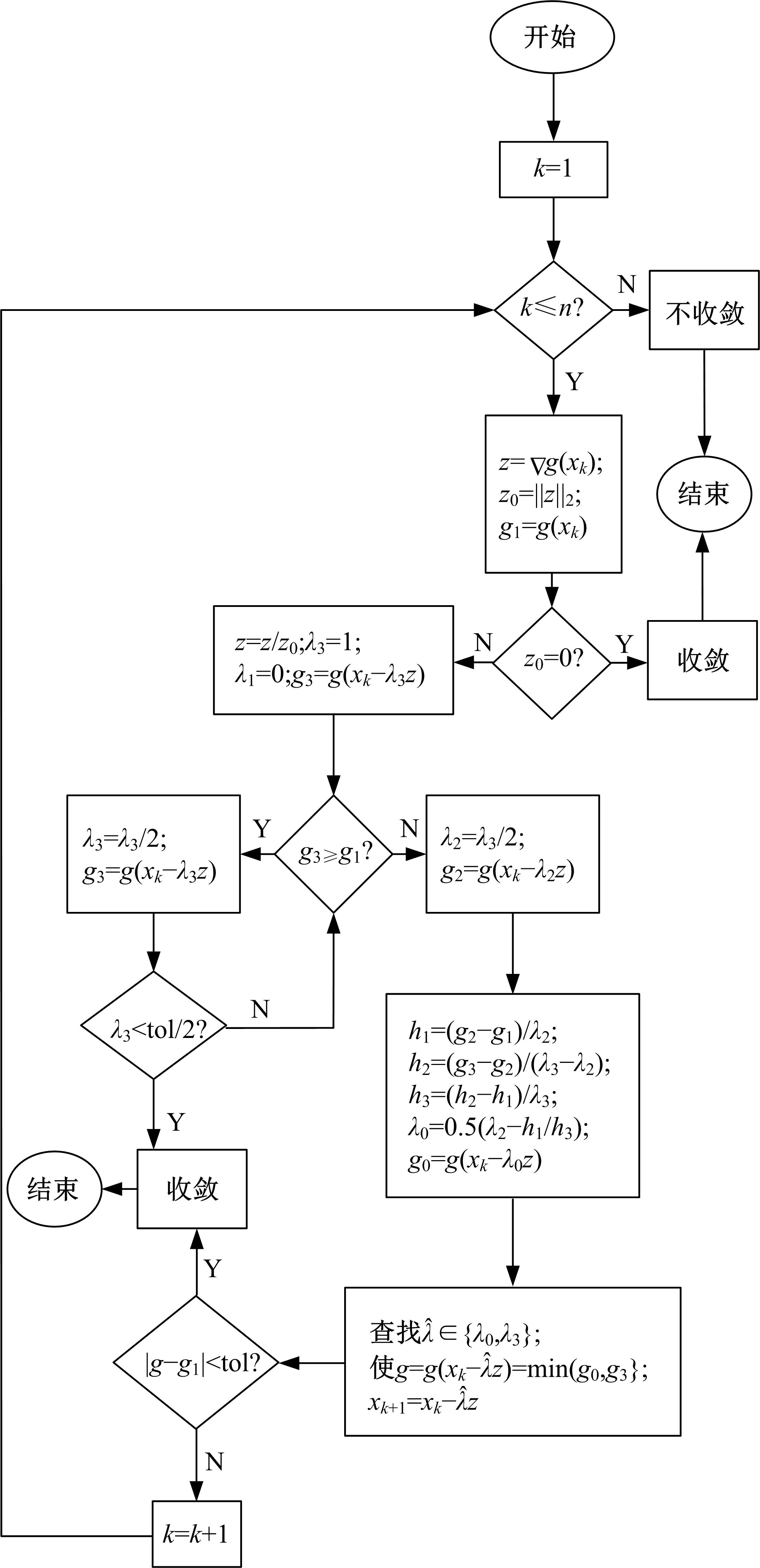
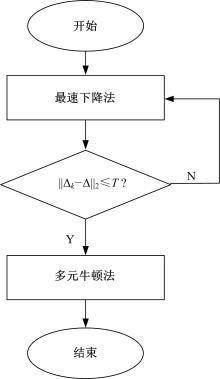
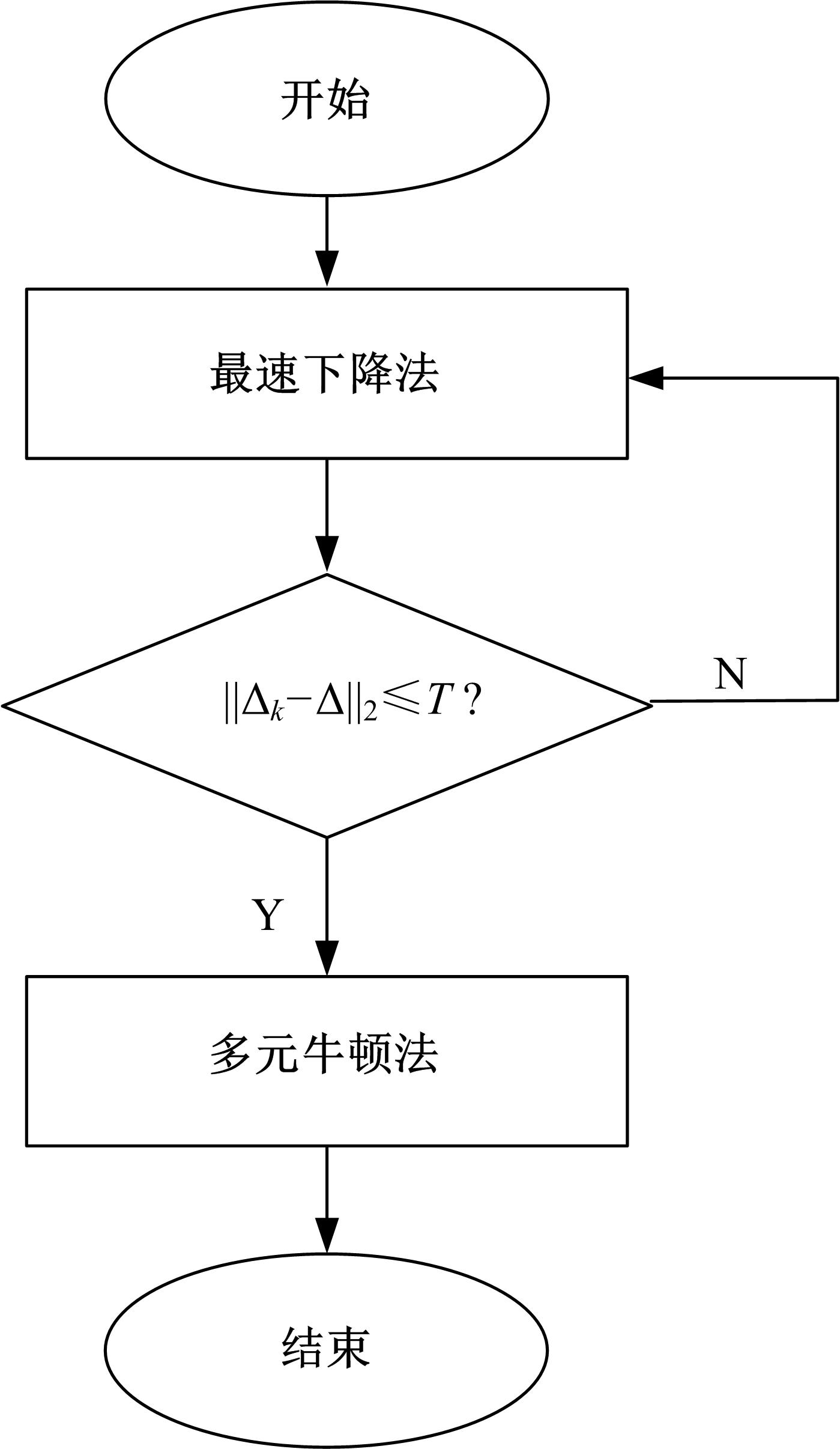
针对6-PSS型并联机构,通过研究其正向运动学,利用各支链铰点在动坐标系、静坐标系和滑块铰点坐标系3种坐标系下的位置关系,推导出6-PSS型并联机构的运动学模型,得到一种简明的运动学正向求解方法。在此基础上,提出了基于多元牛顿法和最速下降法的组合数值方法,并运用数值分析理论和计算机机器算数思想,最大限度提高收敛速度和减少单步迭代计算量。最后,编制了机构运动学的正向求解程序,进行了数值仿真,结果表明:改进的组合数值方法不仅可以更加快速地收敛到真实解,还能降低对初始估计值的依赖,扩大收敛范围,可以有效应用于该型并联机器人系统。
中图分类号:
- TH113
|
| [1] | 贾富淳,孟宪皆,雷雨龙. 基于多目标遗传算法的二自由度动力吸振器优化设计[J]. 吉林大学学报(工学版), 2019, 49(6): 1969-1976. |
| [2] | 曹恩国,刘坤,吉硕,孙震源,徐洪伟,骆星吉. 减重站起康复训练系统机械结构设计与优化[J]. 吉林大学学报(工学版), 2019, 49(5): 1558-1566. |
| [3] | 李俊烨,刘洋,卢慧,孟文卿,杨兆军,张心明. 基于分子动力学的磨粒微切削单晶铁数值分析[J]. 吉林大学学报(工学版), 2019, 49(5): 1567-1574. |
| [4] | 张艳芹,冯雅楠,孔鹏睿,于晓东,孔祥滨. 基于热油携带的静压支承油膜温度场及试验[J]. 吉林大学学报(工学版), 2019, 49(4): 1203-1211. |
| [5] | 杨成,赵永胜,刘志峰,蔡力钢. 基于多尺度理论的栓接结合部动力学建模[J]. 吉林大学学报(工学版), 2019, 49(4): 1212-1220. |
| [6] | 刘坤,吉硕,孙震源,徐洪伟,刘勇,赵静霞. 多功能坐站辅助型如厕轮椅机械结构设计与优化[J]. 吉林大学学报(工学版), 2019, 49(3): 872-880. |
| [7] | 王兴野,张进秋,李国强,彭志召. 惯性质量对齿轮齿条式作动器阻尼特性的影响[J]. 吉林大学学报(工学版), 2019, 49(3): 881-887. |
| [8] | 王家序,倪小康,韩彦峰,向果,肖科. 轴向往复运动下微槽轴承混合润滑数值模型[J]. 吉林大学学报(工学版), 2019, 49(3): 888-896. |
| [9] | 毕秋实,王国强,黄婷婷,毛瑞,鲁艳鹏. 基于DEM-FEM耦合的双齿辊破碎机辊齿强度分析[J]. 吉林大学学报(工学版), 2018, 48(6): 1770-1776. |
| [10] | 朱伟,王传伟,顾开荣,沈惠平,许可,汪源. 一种新型张拉整体并联机构刚度及动力学分析[J]. 吉林大学学报(工学版), 2018, 48(6): 1777-1786. |
| [11] | 刘建芳, 王记波, 刘国君, 李新波, 梁实海, 杨志刚. 基于PMMA内嵌三维流道的压电驱动微混合器[J]. 吉林大学学报(工学版), 2018, 48(5): 1500-1507. |
| [12] | 毛宇泽, 王黎钦. 鼠笼支撑一体化结构对薄壁球轴承承载性能的影响[J]. 吉林大学学报(工学版), 2018, 48(5): 1508-1514. |
| [13] | 王涛, 伞晓刚, 高世杰, 王惠先, 王晶, 倪迎雪. 光电跟踪转台垂直轴系动态特性[J]. 吉林大学学报(工学版), 2018, 48(4): 1099-1105. |
| [14] | 刘坤, 刘勇, 闫建超, 吉硕, 孙震源, 徐洪伟. 基于体外传感检测的人体站起动力学分析[J]. 吉林大学学报(工学版), 2018, 48(4): 1140-1146. |
| [15] | 吉野辰萌, 樊璐璐, 闫磊, 徐涛, 林烨, 郭桂凯. 基于MBNWS算法的假人胸部结构多目标优化设计[J]. 吉林大学学报(工学版), 2018, 48(4): 1133-1139. |
|