吉林大学学报(工学版) ›› 2020, Vol. 50 ›› Issue (5): 1608-1616.doi: 10.13229/j.cnki.jdxbgxb20190469
• 车辆工程·机械工程 • 上一篇
基于遗传与粒子群算法的隔振平台减振性能优化
马芳武( ),韩丽,吴量(),李金杭,杨龙帆
),韩丽,吴量(),李金杭,杨龙帆
- 吉林大学 汽车仿真与控制国家重点实验室, 长春 130022
Damping optimization of heavy⁃loaded anti⁃vibration platform based on genetic algorithm and particle swarm algorithm
Fang-wu MA(),Li HAN,Liang WU(),Jin-hang LI,Long-fan YANG
- State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun 130022,China
摘要:
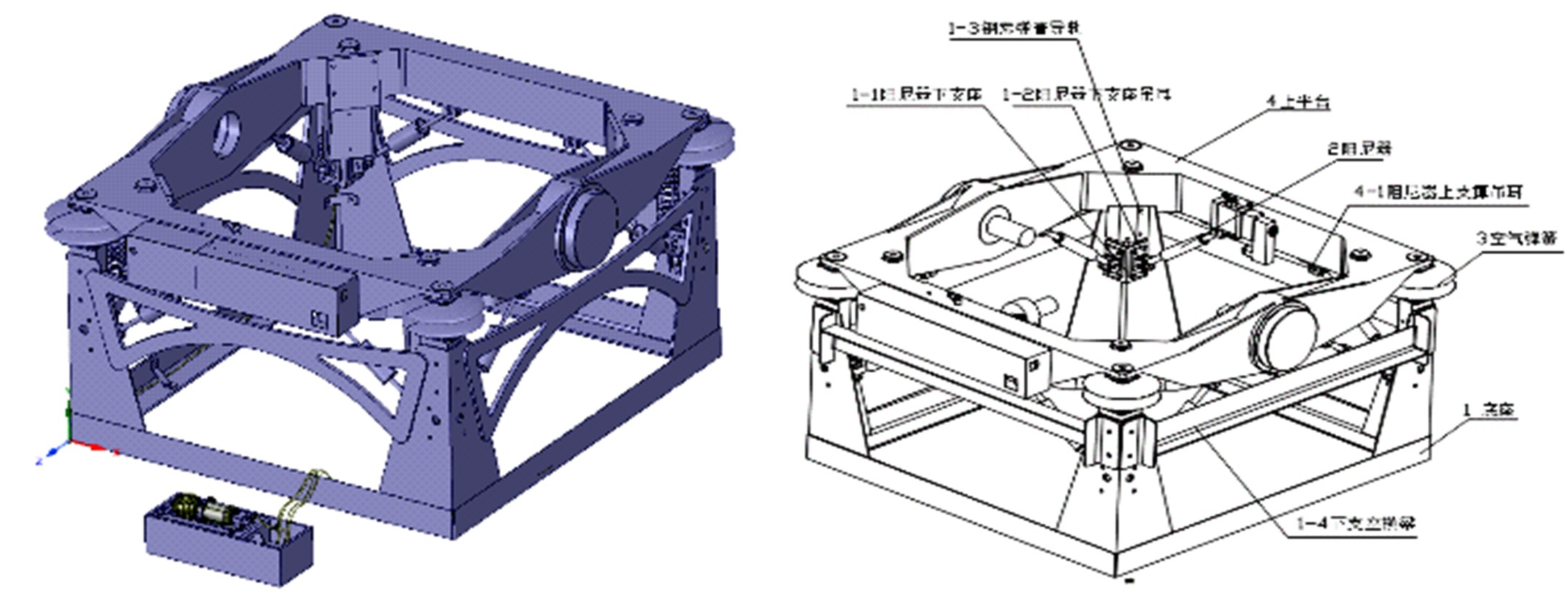
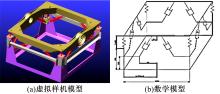
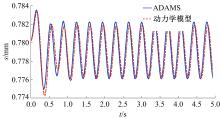
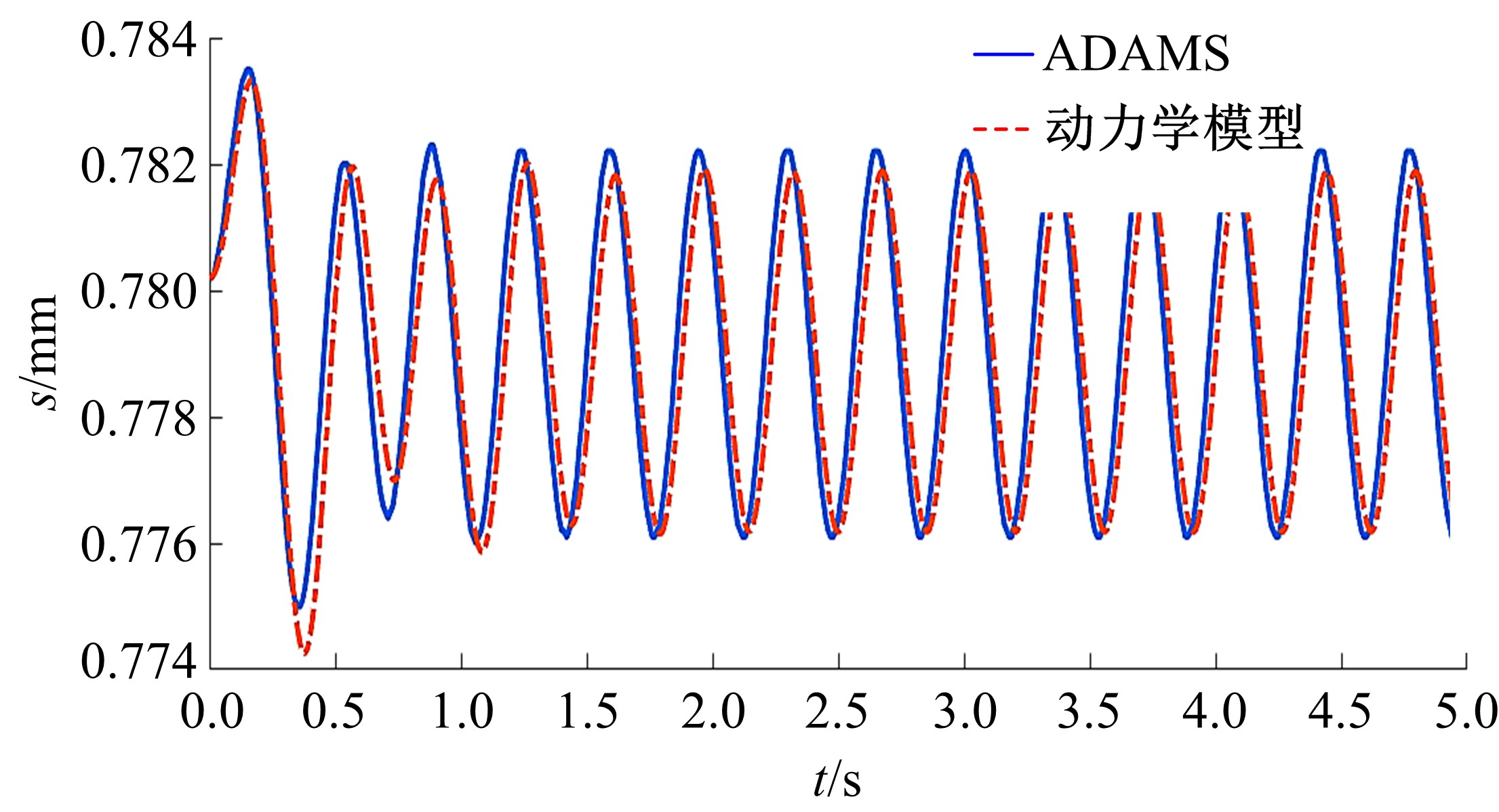
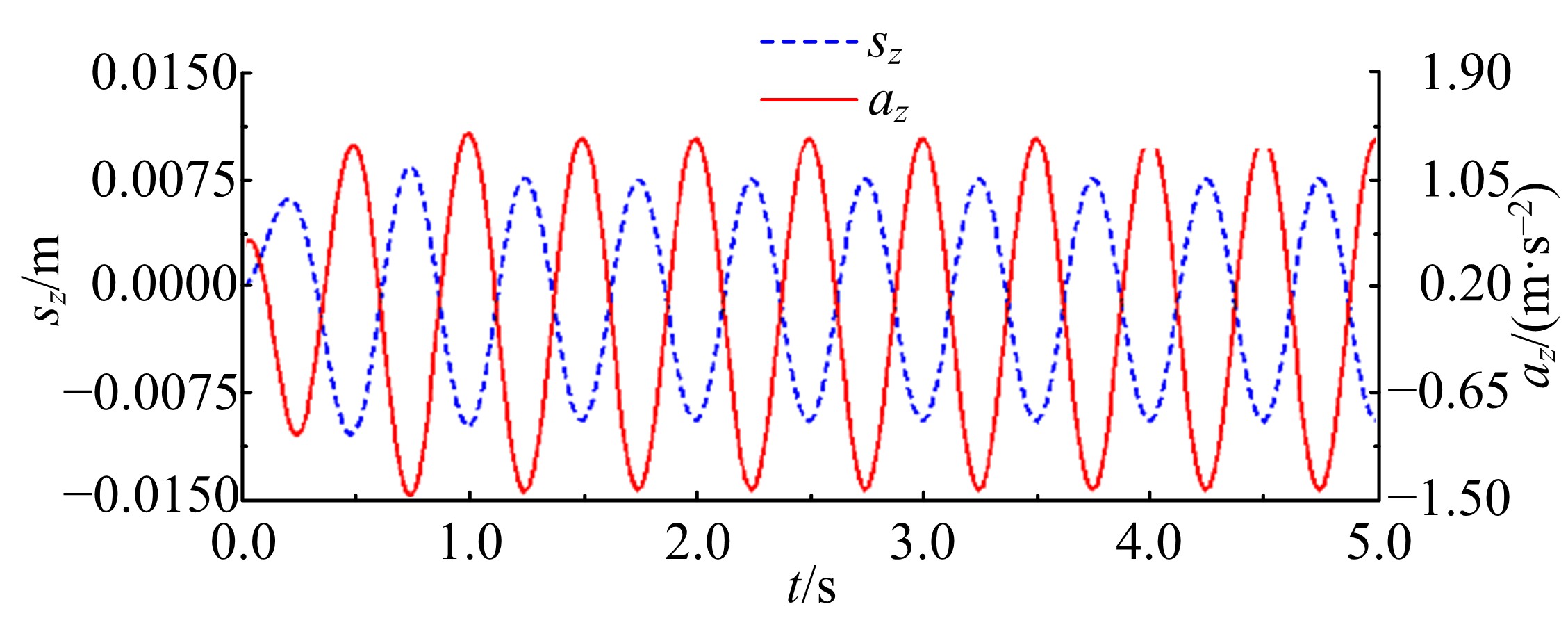
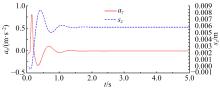
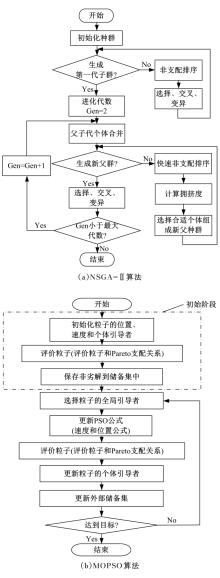
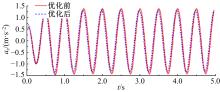
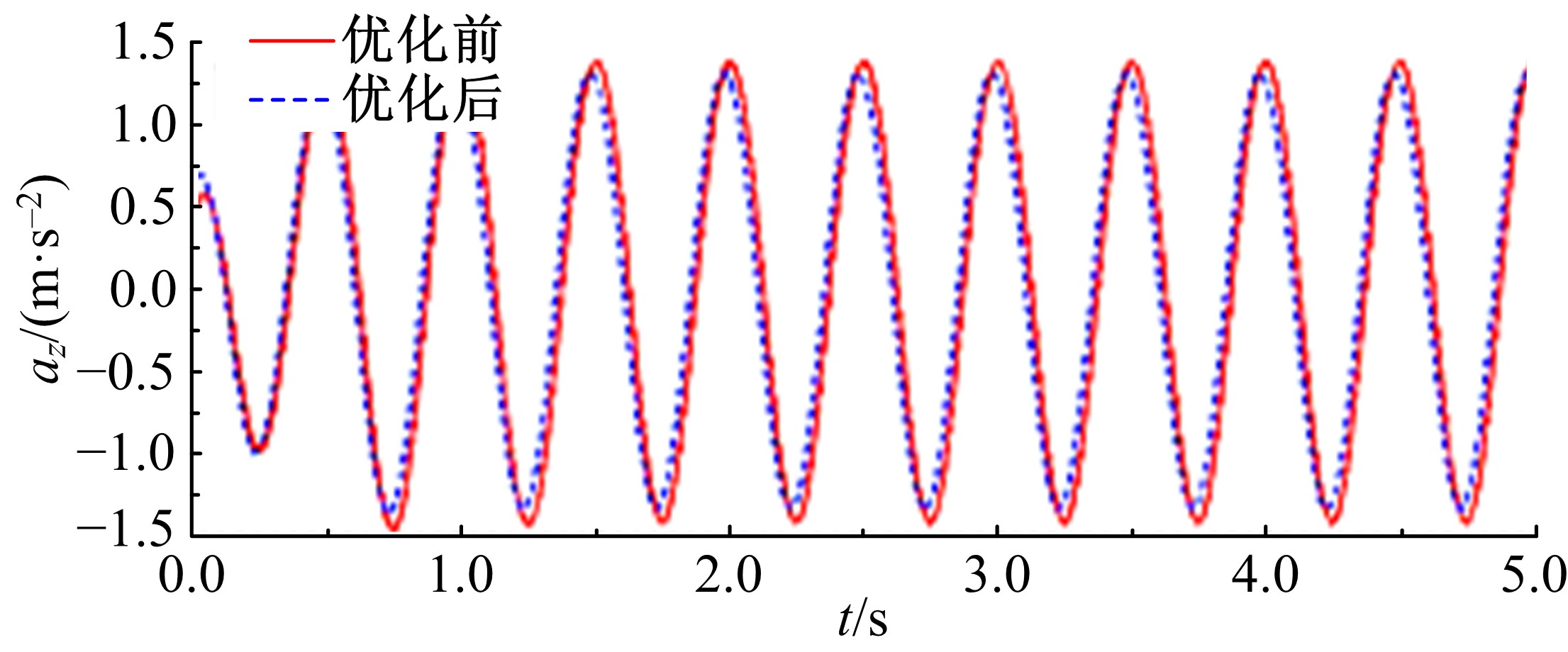
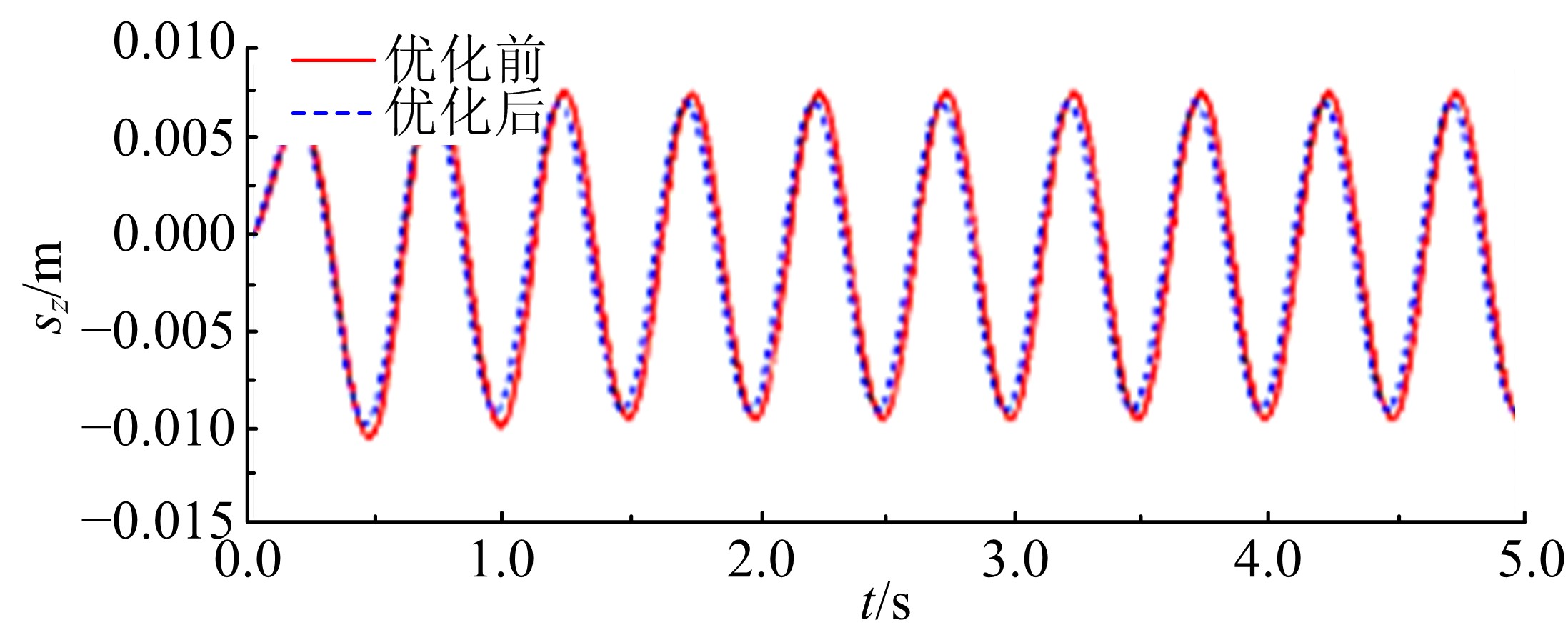
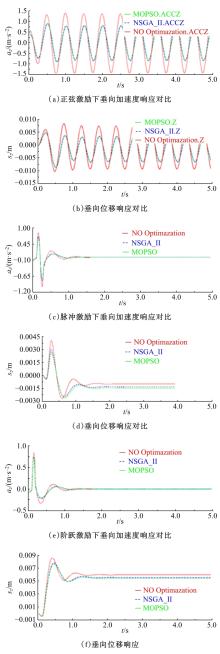
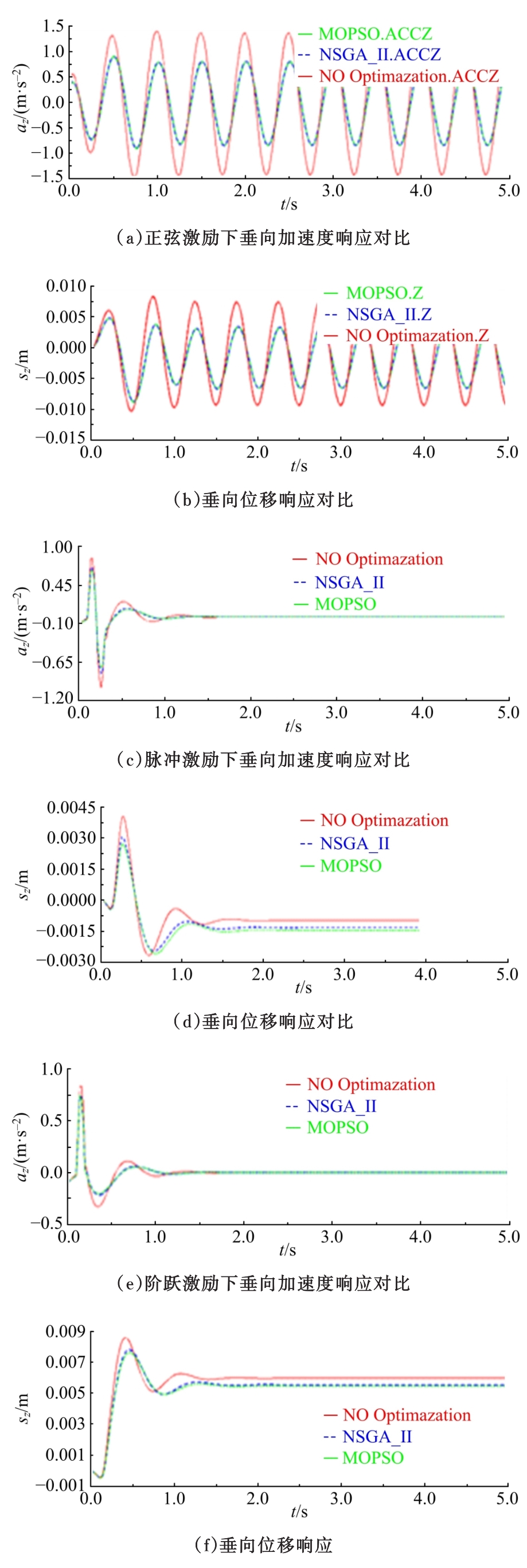
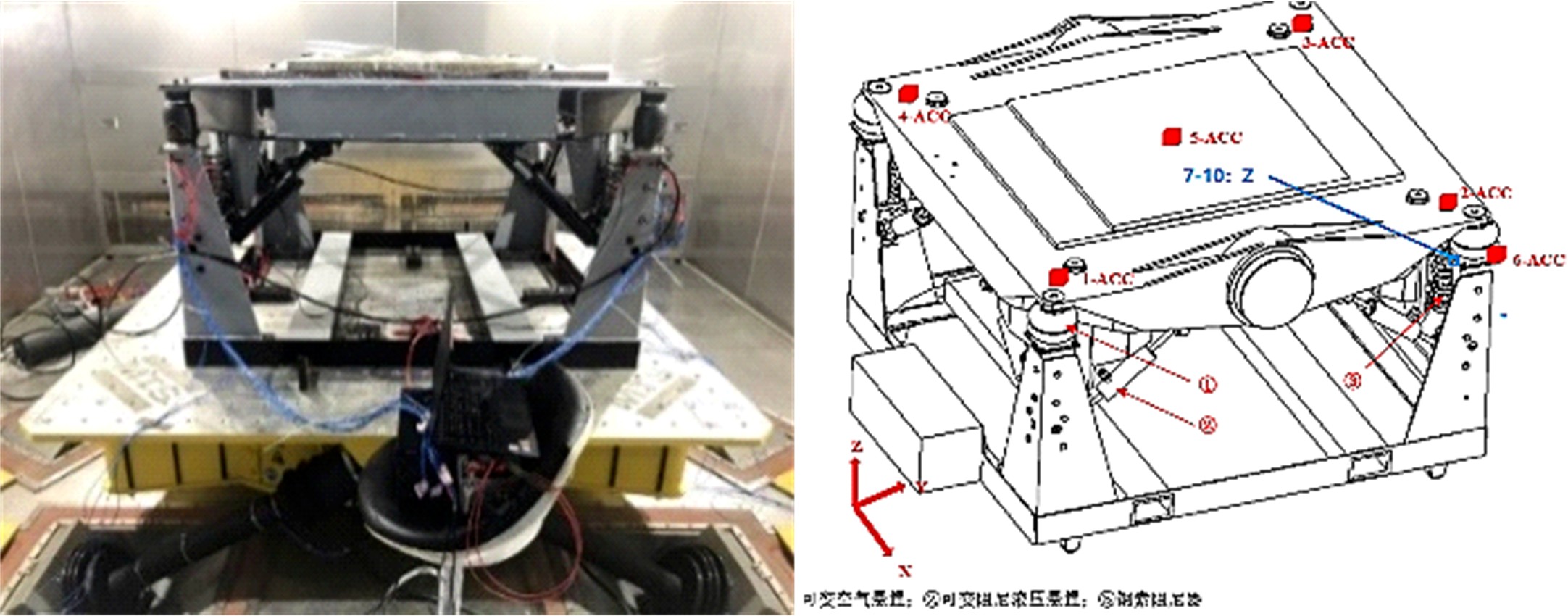
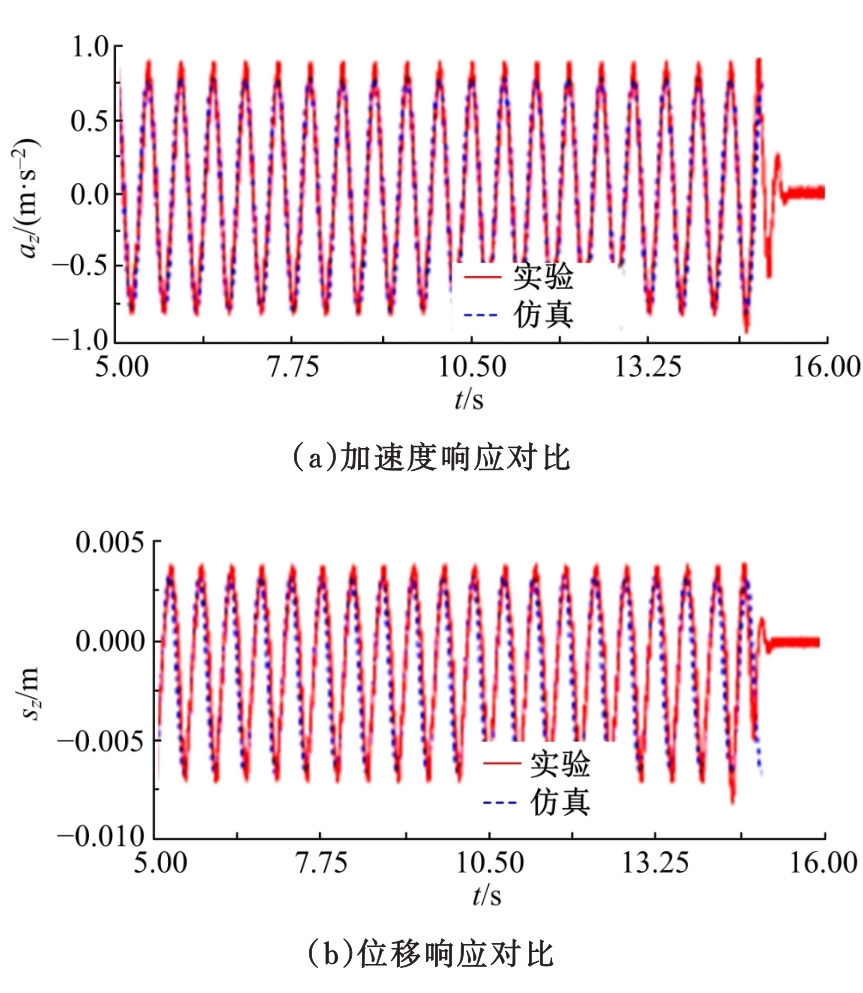
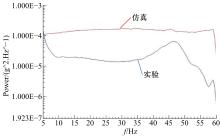
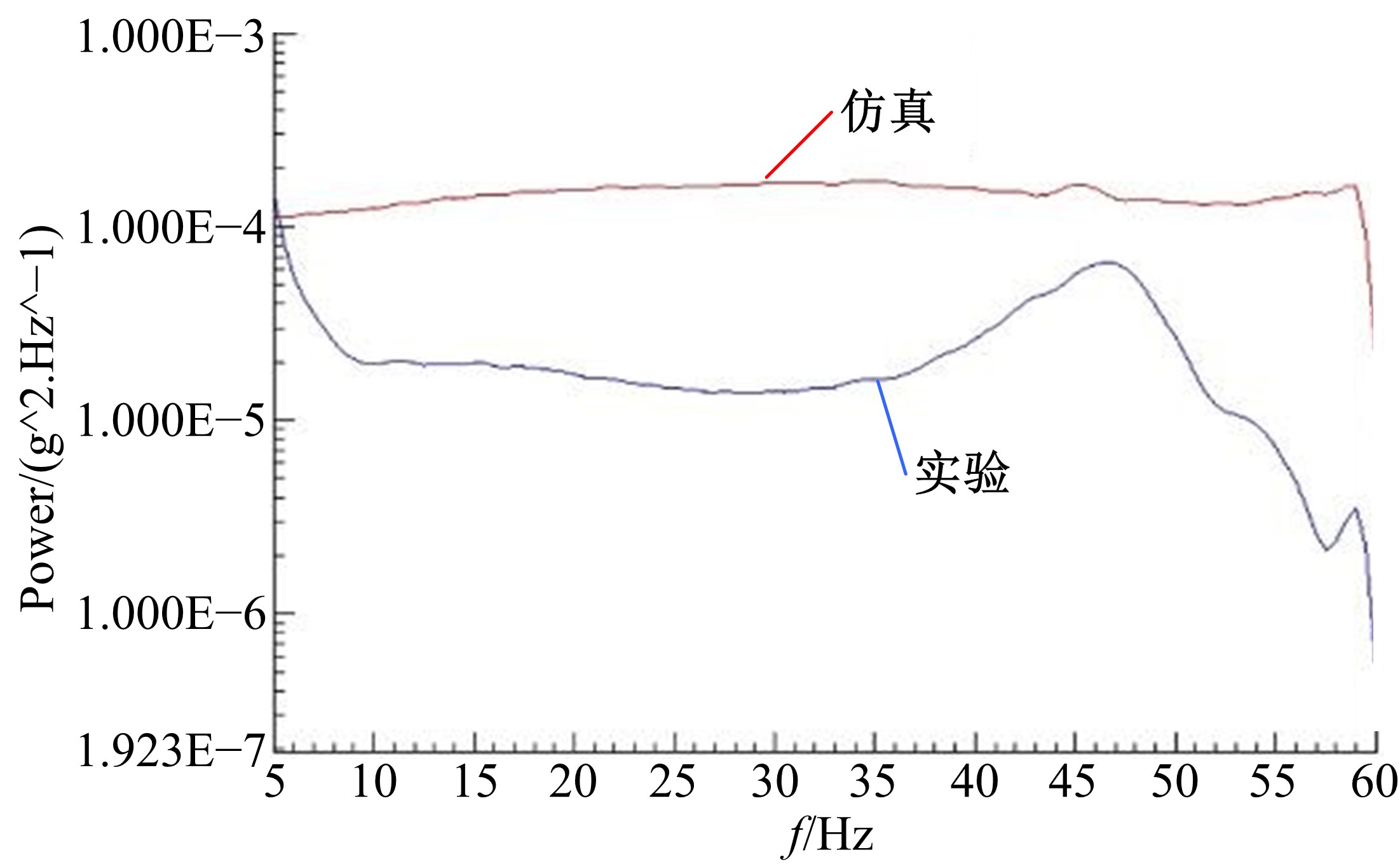
重载隔振平台主要应用于搭载高精密仪器设备,隔离复杂路面不平所产生振动与冲击,为其提供稳定的工作环境。本文以6自由度并式联隔振平台为研究对象,使用精英策略下快速非支配排序遗传算法(NSGA-Ⅱ)和多目标粒子群算法(MOPSO)对平台的减振系统进行参数优化,显著提高了其隔振性能。在多种不同路面干扰信号激励下,使用NSGA-Ⅱ和MOPSO两种方法对减振系统的阻尼和刚度参数进行优化,优化结果表明:不同激励下,平台上平面垂向加速度和垂向位移两优化目标的隔振率最高可达56.21%;此外,应用NSGA-Ⅱ对隔振平台阻尼器支撑角度参数进行优化,使两优化目标隔振率提高了7.00%;并对正弦激励情况下的仿真参数进行了实验验证,实验与仿真误差可达8.30%,验证了参数优化的有效性。
中图分类号:
- U463.99






| 1 | 李耀. 六自由度隔振平台的设计与分析[D]. 南京: 南京航空航天大学机电学院, 2015. |
| Li Yao. Design and analysis of the six-degree-of-freedom vibration-isolation platform[D]. Nanjing: College of Mechanical and Electrical Engineering, Nanjing University of Aeronautics and Astronautics, 2015. | |
| 2 | Youn I, Wu L, Youn E, et al. Tomizuka: attitude motion control of the active suspension system with tracking controller[J] Internal Journal of Automotive Technology, 2015, 16(4): 593-601. |
| 3 | 马芳武, 倪利伟, 吴量, 等. 轮腿式全地形移动机器人位姿闭环控制[J]. 吉林大学学报: 工学版, 2019, 49(6): 1745-1755. |
| Ma Fang-wu, Ni Li-wei, Wu Liang, et al. Position and attitude closed loop control of wheel⁃leggedall terrain mobile robot[J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(6): 1745-1755. | |
| 4 | Wu L, Khan M A, Youn E, et al. Attitude motion control of vehicle including the active passenger seat system[J]. International Journal of Vehicle Design, 2018, 78(1-4): 131-160. |
| 5 | 张抗抗, 徐梁飞, 华剑锋, 等. 基于多目标优化的纯电动车动力系统参数匹配[J]. 汽车工程, 2015, 37(7): 757-765. |
| Zhang Kang-kang, Xu Liang-fei, Hua Jian-feng, et al. A parameter matching method for the powertrain of battery electric vehicle based on multi-objective optimization[J]. Automotive Engineering, 2015, 37(7): 757-765. | |
| 6 | 王庆年, 段本明, 王鹏宇, 等. 插电式混合动力汽车动力传动系参数优化[J]. 吉林大学学报: 工学版, 2017, 47(1): 1-7. |
| Wang Qing-nian, Duan Ben-ming, Wang Peng-yu, et al. Optimization of powertrain transmission parameters of plug in hybrid electric vehicle[J]. Journal of Jilin University(Engineering and Technology Edition), 2017, 47(1): 1-7. | |
| 7 | 王咏. 高精密设备多自由度平台系统微振动混合控制研究[D]. 哈尔滨: 哈尔滨工业大学深圳研究生院, 2007. |
| Wang Yong. Multi-degree-of-freedom microvibration hybrid control system for high technology facilities[D]. Harbin: Harbin Institute of Technology, Shenzhen Graduate School, 2007. | |
| 8 | 李林, 宣明, 贾宏光, 等. 光电稳定平台隔振系统的设计与优化[J]. 计算机仿真, 2017, 34(3): 77-81. |
| Li Lin, Xuan Ming, Jia Hong-guang, et al. Design and optimization of vibration isolation system for photoelectric stabilized platform[J]. Computer Simulation, 2017, 34(3): 77-81. | |
| 9 | 谢振盛. 汽車主動式懸吊系統之最佳化控制器設計研究[D]. 台南: 昆山科技大学工程学院, 2007. |
| Xie Zhen-sheng. Study on optimal controllers design for automotive active suspension systems[D]. Tainan: Science and Technology, Kun Shan University of Technology, 2007. | |
| 10 | Wu L, Li J H, Ma F W, et al. Optimal anti-vibration design of vehicle-mounted vibration isolation platform[C]∥ SAE Technical Paper, 2018-01-1400. |
| 11 | Deb K, Pratap A, Agarwal S, et al. A fast elitist multi-objective genetic algorithm[J]. Transactions on Evolutionary Computation, 2002, 6(2): 182-197. |
| 12 | 李杰, 车华军, 哈兰涛. 遗传算法及在汽车悬架参数优化设计中的应用[J]. 汽车技术, 2006(6): 18-21. |
| Li Jie, Che Hua-jun, Lan-tao Ha. The application of genetic algorithm in the optimum design automotive suspension parameter[J]. Automotive Technology, 2006(6): 18-21. | |
| 13 | 张勇, 巩敦卫. 先进多目标粒子群优化理论及其应用[M]. 北京: 科学出版社, 2016. |
| 14 | 周红妮, 冯樱, 赵慧勇, 等. 基于ISIGHT 集成技术的某重卡双轴转向机构多目标优化[J]. 汽车研究与开发, 2015, 6(4): 26-30. |
| Zhou Hong-ni, Feng Ying, Zhao Hui-yong, et al. Multi-objective optimization on dual-axle steering mechanism of a heavy vehicle based on integration technology of ISIGHT[J]. Automobile Research and Development, 2015, 6(4): 26-30. |
| [1] | 陈学深,陈涛,武涛,马旭,曾令超,陈林涛. 覆草冬种马铃薯收获机稻草分离机构设计与试验[J]. 吉林大学学报(工学版), 2020, 50(2): 749-757. |
| [2] | 李银平,靳添絮,刘立. 纯电动铲运机弓网续能系统设计与动态特性仿真[J]. 吉林大学学报(工学版), 2020, 50(2): 454-463. |
| [3] | 马芳武,梁鸿宇,赵颖,杨猛,蒲永锋. 内凹三角形负泊松比结构耐撞性多目标优化设计[J]. 吉林大学学报(工学版), 2020, 50(1): 29-35. |
| [4] | 蔡中义,孟凡响,陈庆敏,赵轩. 复杂钩舌锻件近净成形的预锻形状优化设计[J]. 吉林大学学报(工学版), 2020, 50(1): 84-90. |
| [5] | 贾富淳,孟宪皆,雷雨龙. 基于多目标遗传算法的二自由度动力吸振器优化设计[J]. 吉林大学学报(工学版), 2019, 49(6): 1969-1976. |
| [6] | 王家序,蒋倩倩,李俊阳,韩彦峰,张雷,唐挺. 双圆弧谐波传动柔轮齿形参数多目标优化设计[J]. 吉林大学学报(工学版), 2019, 49(4): 1194-1202. |
| [7] | 李欣,王丹,陈军绪,孙延朋,谷诤巍,徐虹. 手刹固定板冲压成形数值模拟[J]. 吉林大学学报(工学版), 2019, 49(4): 1258-1265. |
| [8] | 夏利红, 邓兆祥. 电子机械制动执行器的整体最优匹配设计[J]. 吉林大学学报(工学版), 2018, 48(4): 998-1007. |
| [9] | 吉野辰萌, 樊璐璐, 闫磊, 徐涛, 林烨, 郭桂凯. 基于MBNWS算法的假人胸部结构多目标优化设计[J]. 吉林大学学报(工学版), 2018, 48(4): 1133-1139. |
| [10] | 邱小明, 王银雪, 姚汉伟, 房雪晴, 邢飞. 基于灰色关联的DP1180/DP590异质点焊接头工艺参数优化[J]. 吉林大学学报(工学版), 2018, 48(4): 1147-1152. |
| [11] | 王登峰, 张帅, 汪勇, 陈辉. 基于疲劳和13°冲击性能的组装式车轮优化设计[J]. 吉林大学学报(工学版), 2018, 48(1): 44-56. |
| [12] | 于繁华, 刘仁云, 张义民, 张晓丽, 孙秋成. 机械零部件动态可靠性稳健优化设计的群智能算法[J]. 吉林大学学报(工学版), 2017, 47(6): 1903-1908. |
| [13] | 周放, 宋传学, 梁天唯, 肖峰. 采用NSGA-II算法的车载复合电源参数匹配[J]. 吉林大学学报(工学版), 2017, 47(5): 1336-1343. |
| [14] | 刘颖, 张凯, 于向军. 基于代理模型的中空轴式大型静压轴承多目标优化[J]. 吉林大学学报(工学版), 2017, 47(4): 1130-1137. |
| [15] | 胡侃, 于野, 盈亮, 胡平, 侯文彬. 基于校车侧翻安全性的热冲压立柱结构优化设计[J]. 吉林大学学报(工学版), 2017, 47(3): 884-890. |
|
||