吉林大学学报(工学版) ›› 2021, Vol. 51 ›› Issue (6): 2295-2303.doi: 10.13229/j.cnki.jdxbgxb20200680
• 通信与控制工程 • 上一篇
永磁直线同步电机自适应模糊分数阶滑模精密运动控制
魏东辉1( ),汪霭廷1,计京鸿2,房俊龙1()
),汪霭廷1,计京鸿2,房俊龙1()
- 1.东北农业大学 电气与信息学院,哈尔滨 150030
2.哈尔滨华德学院,哈尔滨 150025
Adaptive fuzzy fractional⁃order sliding mode precise motion control of permanent magnet linear synchronous motor
Dong-hui WEI1(),Ai-ting WANG1,Jing-hong JI2,Jun-long FANG1()
- 1.College of Electrical and Information,Northeast Agricultural University,Harbin 150030,China
2.Harbin Huade College,Harbin 150025,China
摘要:
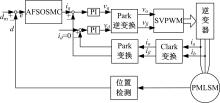
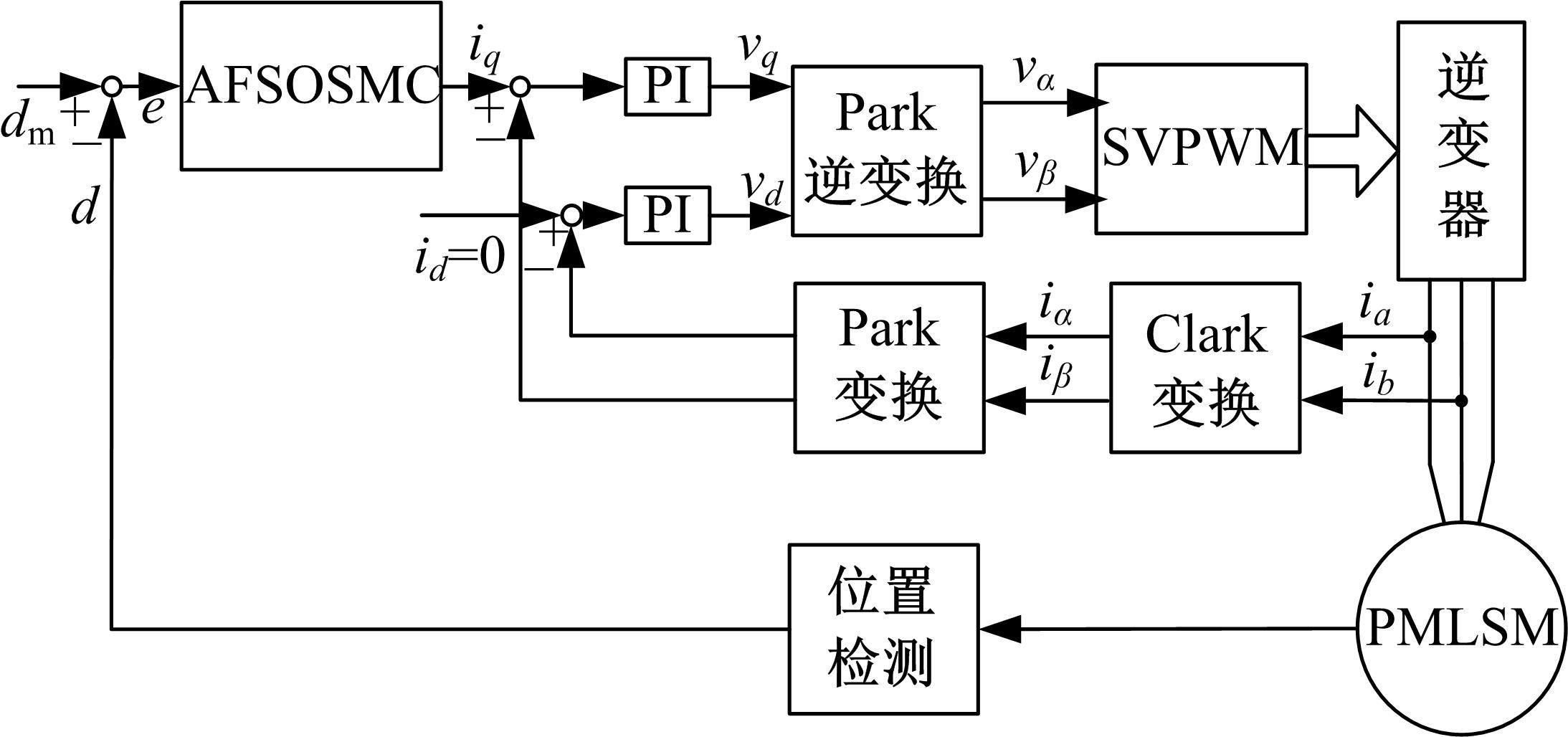
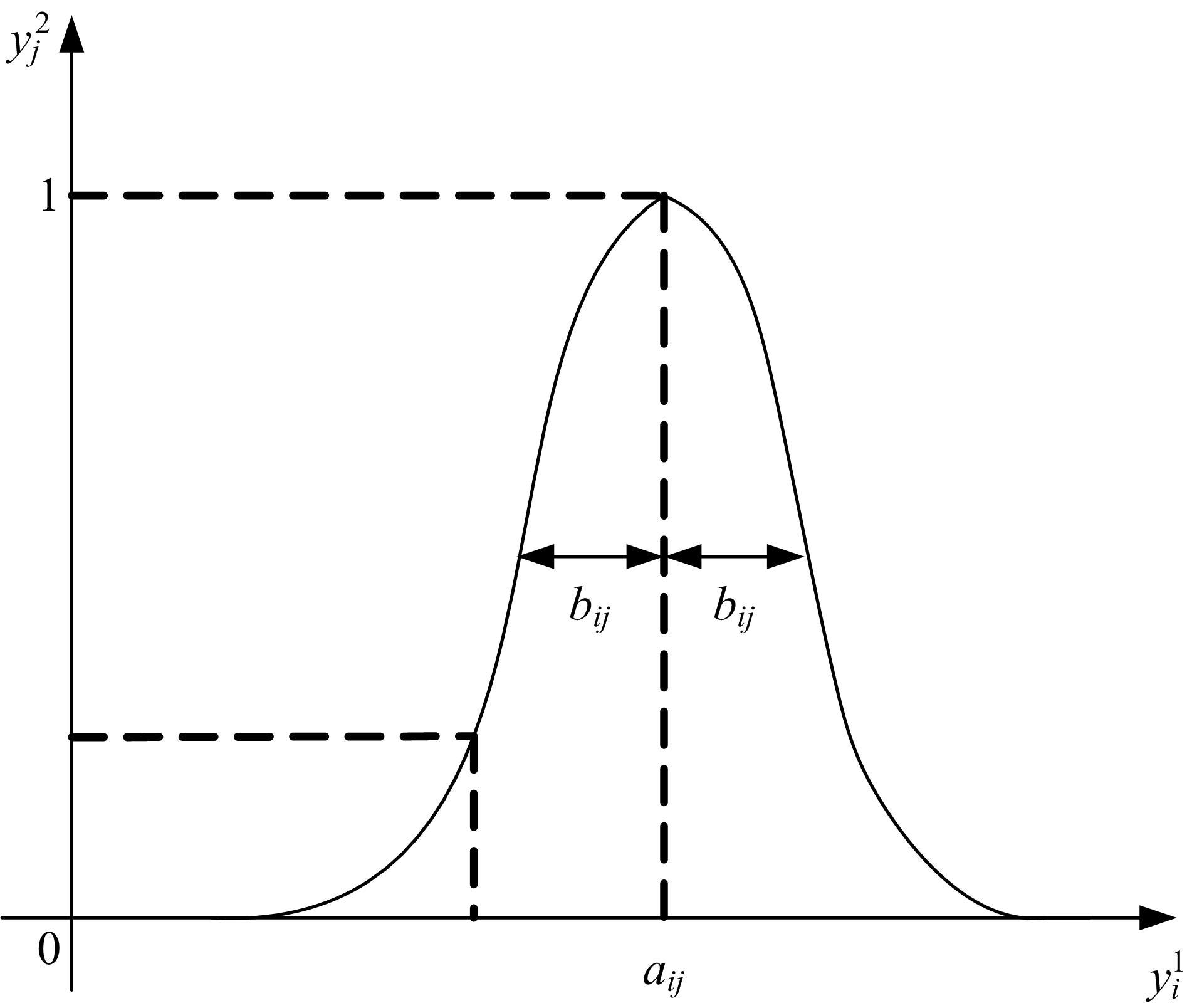
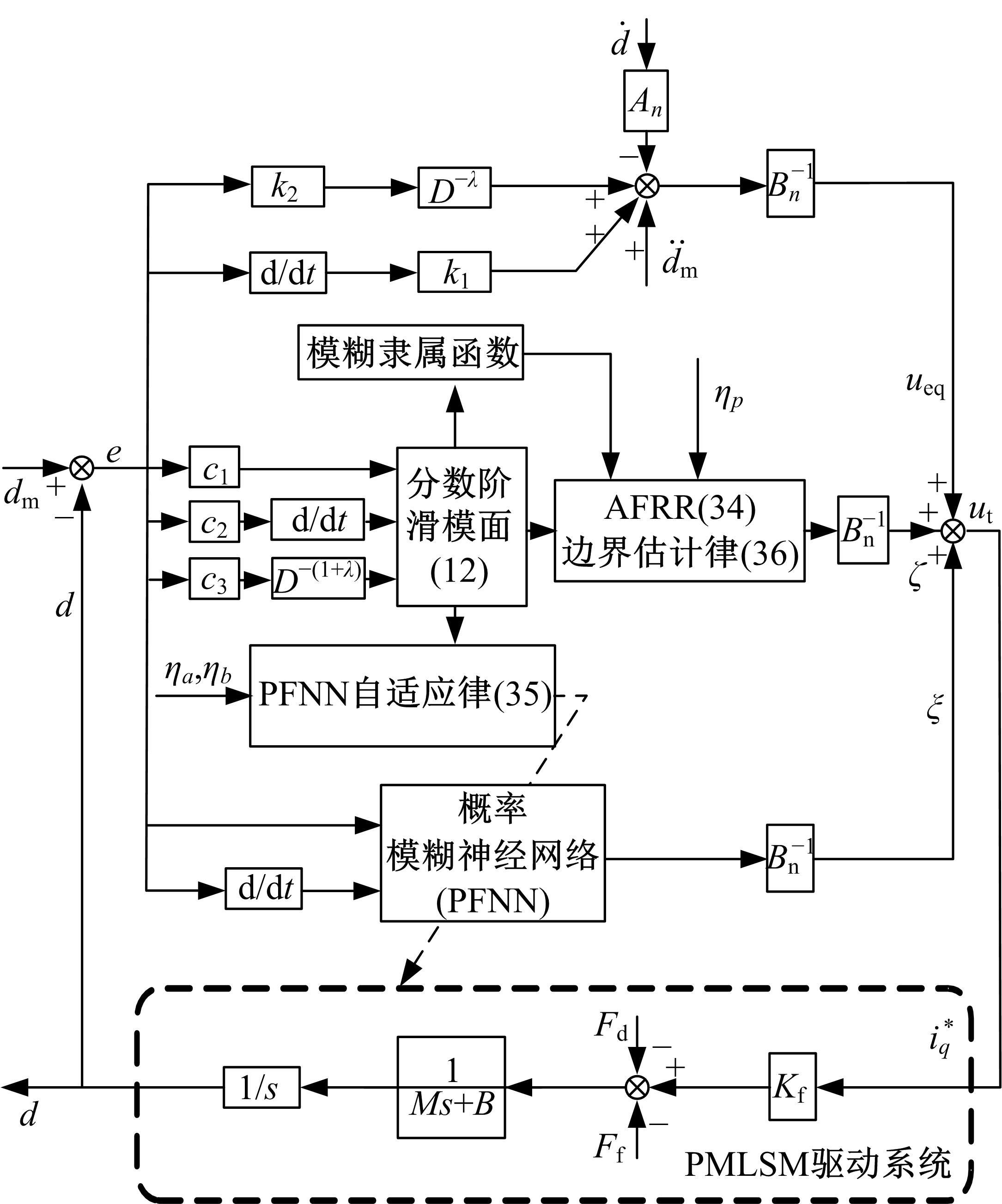
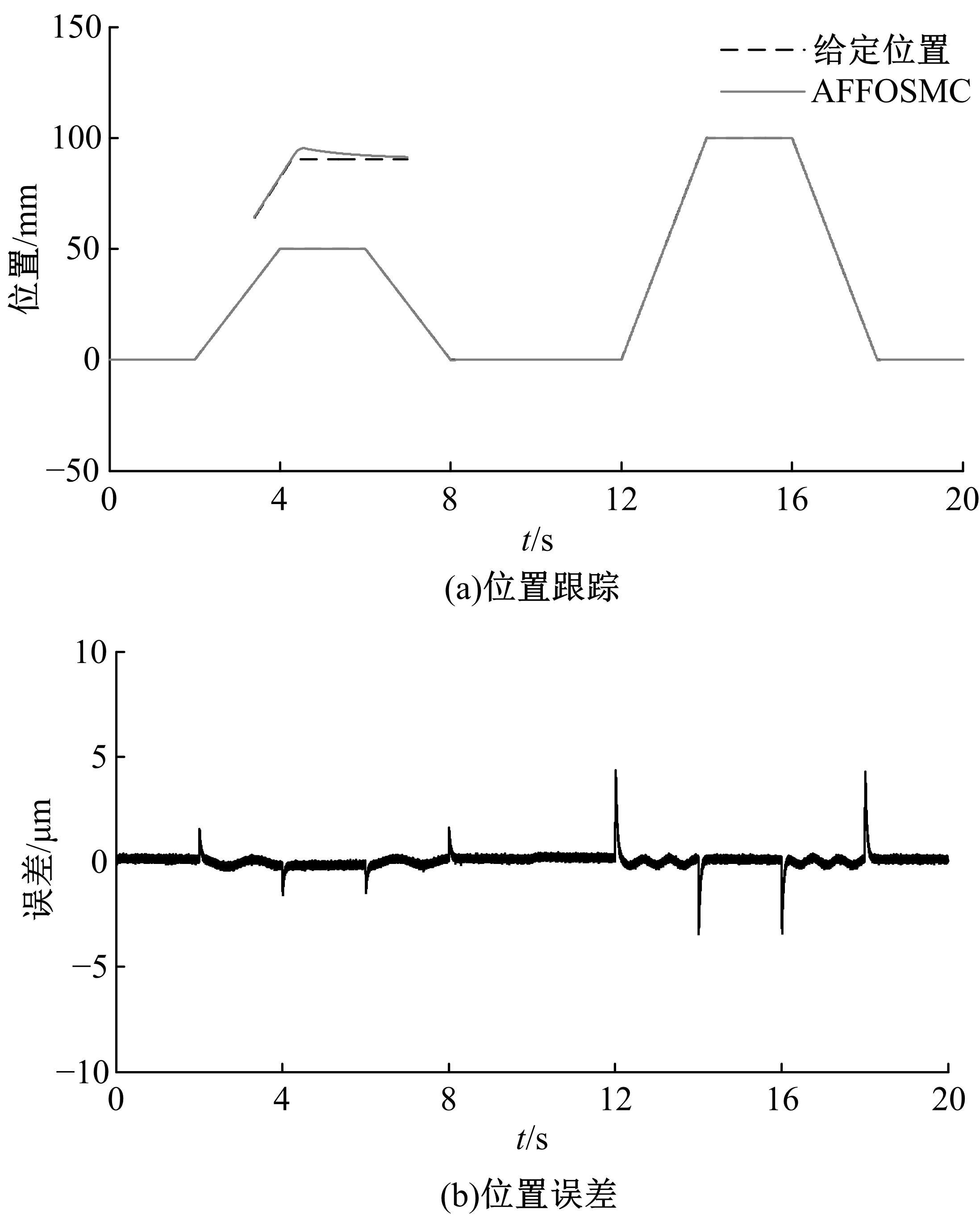
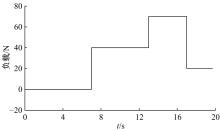
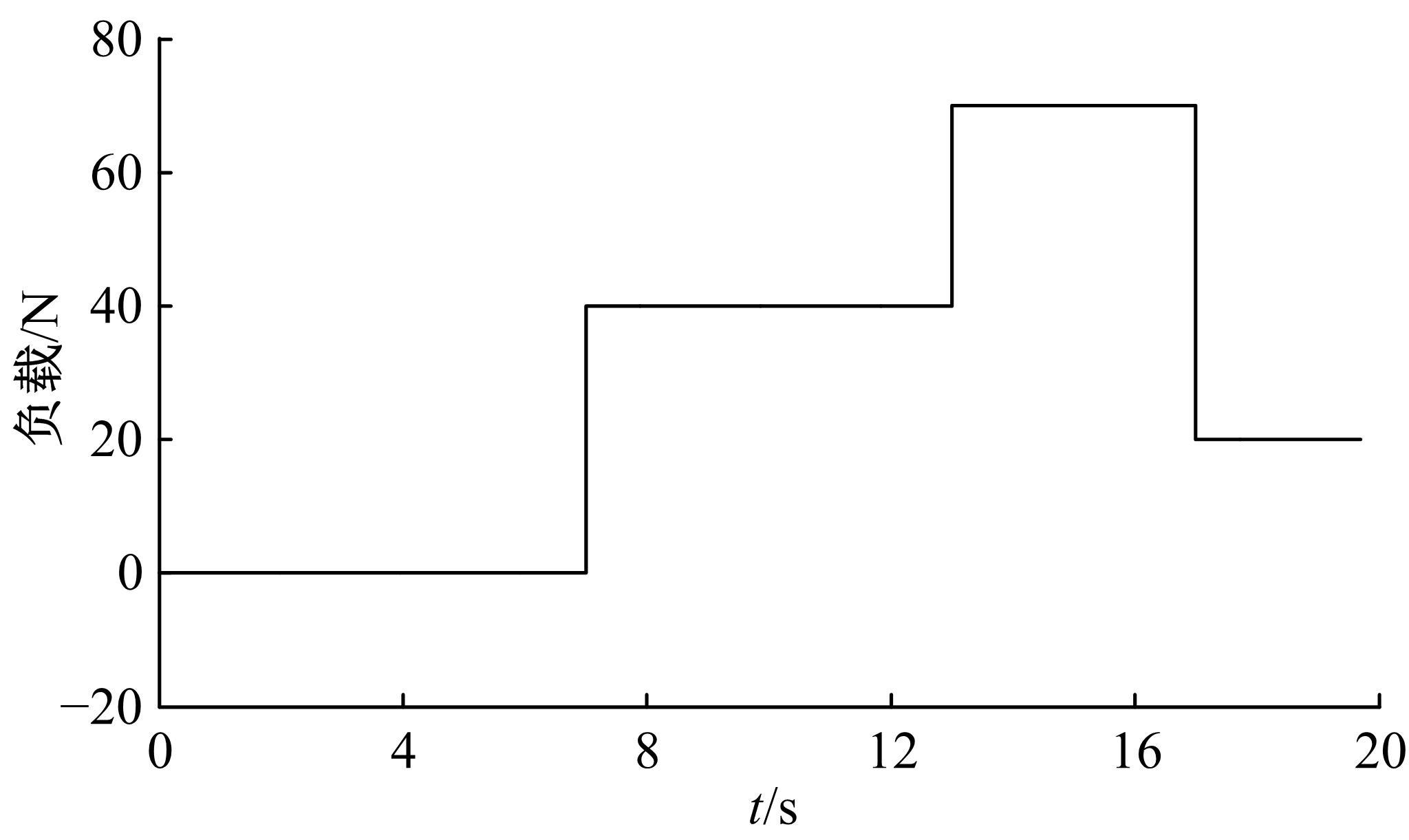
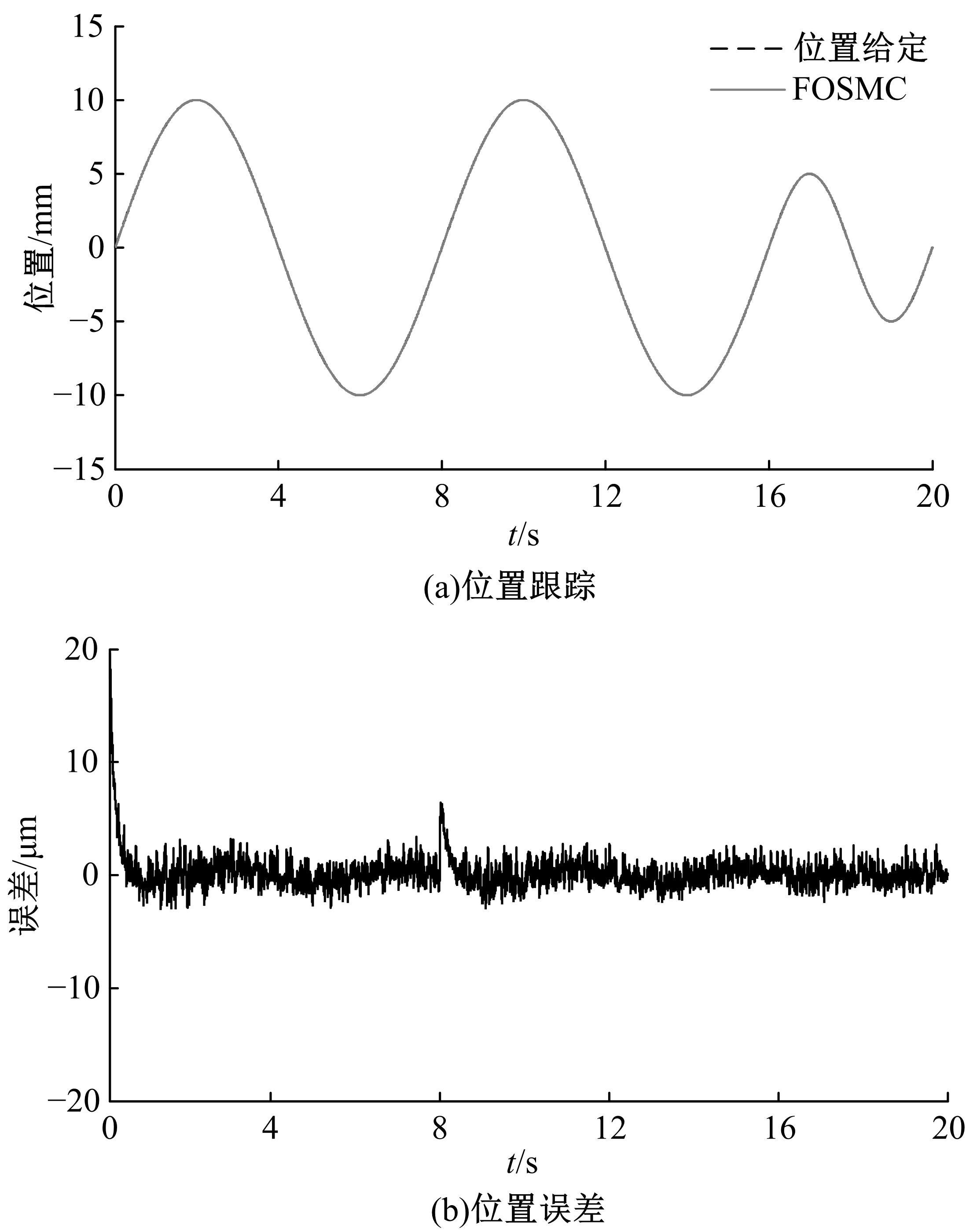
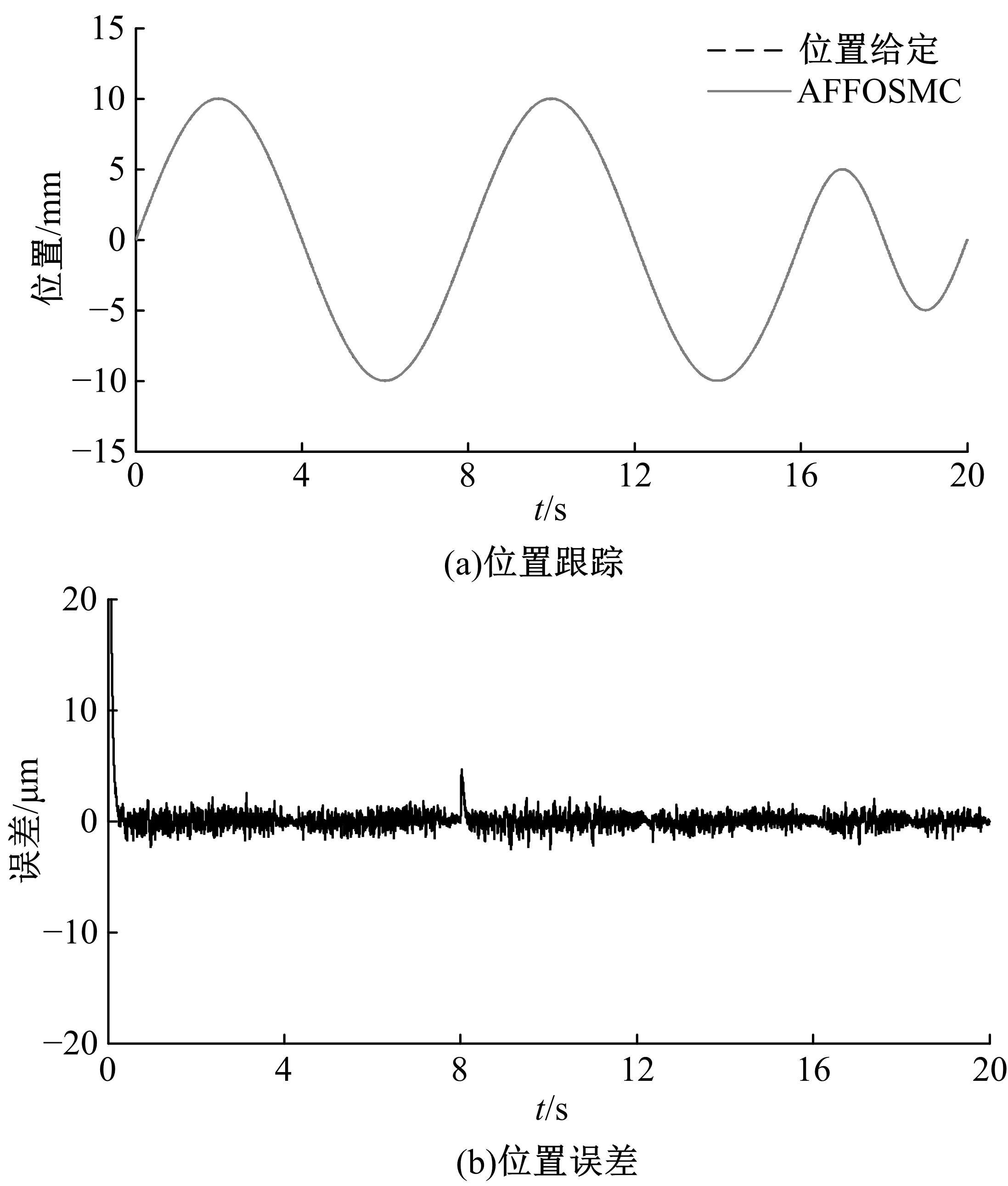
为解决永磁直线同步电机(PMLSM)伺服系统中存在不确定性而影响伺服精度的问题,本文提出了一种自适应模糊分数阶滑模控制(AFFOSMC)方法以保证PMLSM的动子位置精密跟随给定。首先,建立含有参数变化、外部扰动等不确定性的PMLSM数学模型。然后,设计分数阶滑模控制(FOSMC)方法以保证系统的鲁棒性。由于在实际应用中难以确定FOSMC的切换控制增益,因此采用AFFOSMC对系统的不确定性进行估计。同时,针对AFFOSMC的估计误差以及FOSMC中切换控制引起的抖振,设计自适应模糊到达调节器(AFRR)对其进行补偿。因此,在不需要不确定性边界信息的情况下,仍可实现伺服性能的进一步提高。最后,基于DSP的系统实验结果表明,本文AFFOSMC方法能够有效减弱参数变化和外部干扰等对系统造成的影响,提高系统的鲁棒性,并能精确跟踪响应。
中图分类号:
- TM351











| 1 | 李金子, 肖炯然, 潘剑飞. 多永磁同步直线电机协同控制研究[J]. 吉林大学学报:信息科学版, 2019, 37(1):32-39. |
| Li Jin-zi, Xiao Jiong-ran, Pan Jian-fei. Research on cooperative control of Mmulti-PMSM linear Mmotors[J]. Journal of Jilin University(Information Science Edition), 2019, 37(1): 32-39. | |
| 2 | 赵健, 邓志辉, 朱冰,等. 面向电子机械助力制动的永磁同步电机位置伺服控制[J]. 吉林大学学报:工学版, 2020, 50(3):834-841. |
| Zhao Jian, Deng Zhi-hui, Zhu Bing, et al. Position servo control of permanent magnet synchronous motor for electro⁃mechanical brake booster[J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(3): 834-841. | |
| 3 | Li L Y, Guo Q B, Liu J X, et al. Design and implementation of a high-performance PMLSM control system with deadbeat current control and SMC[J]. Applied Mechanics & Materials, 2013, 2689: 692-697. |
| 4 | Zhang Y M, Yan P. An adaptive integral sliding mode control approach for piezoelectric nano-manipulation with optimal transient performance[J]. Mechatronics, 2018, 52: 119-126. |
| 5 | 王坤, 王建美, 王芳, 等. 非匹配不确定系统的滑模控制及在电机控制中的应用[J]. 控制理论与应用, 2019,36(1): 143-150. |
| Wang Kun, Wang Jian-mei, Wang Fang, et al. Sliding mode control for nonlinear system with mismatched uncertainties and application in motor control[J]. Control Theory & Applications, 2019, 36(1): 143-150. | |
| 6 | 王春风, 赵青青, 孟旭,等. 直流电机的非奇异快速Terminal滑模位置控制[J]. 哈尔滨理工大学学报, 2019, 24(4): 36-41. |
| Wang Chun-feng, Zhao Qing-qing, Meng Xu, et al. Non-singular fast Terminal sliding mode position control for DC motor[J]. Journal of Harbin University of Science and Technology, 2019, 24(4): 36-41. | |
| 7 | 侯利民, 王巍. 表面式永磁同步电机无源非奇异快速终端滑模控制[J]. 电工技术学报, 2014, 29(11):45-52. |
| Hou Li-min, Wang Wei. Passivity-based control and nonsingular mode control for SPMSM[J]. Transactions of China Electrotechnical Society, 2014, 29(11): 45-52. | |
| 8 | Maddahi A, Sepehri N, Kinsner W. Fractional-order control of hydraulically powered actuators: controller design and experimental validation[J]. IEEE/ASME Transactions on Mechatronics, 2019, 24(2):796-807. |
| 9 | Ullah N, Wang Shao-ping, Khattak M I, et al. Fractional order adaptive fuzzy sliding mode controller for a position servo system subjected to aerodynamic loading and nonlinearities[J]. Aerospace Science and Technology, 2015, 43: 381-387. |
| 10 | Ebrahimkhani S. Robust fractional order sliding mode control of doubly-fed induction generator (DFIG)-based wind turbines[J]. ISA Transactions, 2016, 63: 343-354. |
| 11 | 党选举, 徐小平, 于晓明, 等.永磁同步直线电机的小波神经网络控制[J]. 电机与控制学报, 2013, 17(1):43-50. |
| Dang Xuan-ju, Xu Xiao-ping, Yu Xiao-ming, et al. Control for PMLSM based on wavelet neural network[J]. Electric Machines and Control, 2013, 17(1):43-50. | |
| 12 | Ting C S, Lieu J F, Liu C S, et al. An adaptive FNN control design of PMLSM in stationary reference frame[J]. Journal of Control Automation & Electrical Systems, 2016, 27(4):391-405. |
| 13 | 王香, 张永林. 基于RBF神经网络的AUV路径跟踪分数阶滑模控制[J]. 水下无人系统学报, 2020, 28(3):284-290. |
| Wang Xiang, Zhang Yong-lin. Fractional-order sliding mode control based on RBF neural network for AUV path tracking [J]. Journal of Unmanned Undersea Systems, 2020, 28(3):284-290. |
| [1] | 罗勇,韦永恒,黄欢,肖人杰,任淋,崔环宇. 驾驶员意图识别的P2.5插混构型双离合器起步控制[J]. 吉林大学学报(工学版), 2021, 51(5): 1575-1582. |
| [2] | 施昕昕,黄家才,高芳征. 基于分数阶BICO滤波器的运动控制测量噪声抑制[J]. 吉林大学学报(工学版), 2021, 51(5): 1873-1878. |
| [3] | 龙江启,向锦涛,俞平,王骏骋. 适用于非线性主动悬架滑模控制的线性干扰观测器[J]. 吉林大学学报(工学版), 2021, 51(4): 1230-1240. |
| [4] | 张家旭,王欣志,赵健,施正堂. 汽车高速换道避让路径规划及离散滑模跟踪控制[J]. 吉林大学学报(工学版), 2021, 51(3): 1081-1090. |
| [5] | 周挺,徐宇工,吴斌. 球形机器人的自适应分数阶PIλDμ滑模速度控制方法[J]. 吉林大学学报(工学版), 2021, 51(2): 728-737. |
| [6] | 初亮,董力嘉,许楠,张立峰,贾一帆,杨志华. 基于开绕组电机的增程式电动车动力系统构型及其功率分配[J]. 吉林大学学报(工学版), 2021, 51(1): 72-82. |
| [7] | 吴爱国,韩俊庆,董娜. 基于极局部模型的机械臂自适应滑模控制[J]. 吉林大学学报(工学版), 2020, 50(5): 1905-1912. |
| [8] | 李静,石求军,洪良,刘鹏. 基于车辆状态估计的商用车ESC神经网络滑模控制[J]. 吉林大学学报(工学版), 2020, 50(5): 1545-1555. |
| [9] | 王伟,赵健廷,胡宽荣,郭永仓. 基于快速非奇异终端滑模的机械臂轨迹跟踪方法[J]. 吉林大学学报(工学版), 2020, 50(2): 464-471. |
| [10] | 李寿涛,李秋媛,刘辉,丁辉,田彦涛,于丁力. 可实现车辆稳定性控制的滑模变结构策略[J]. 吉林大学学报(工学版), 2019, 49(4): 1288-1292. |
| [11] | 李静,石求军,刘鹏,户亚威. 基于纵向车速估算的商用车ABS神经网络滑模控制[J]. 吉林大学学报(工学版), 2019, 49(4): 1017-1025. |
| [12] | 姜继海, 葛泽华, 杨晨, 梁海健. 基于微分器的直驱电液伺服系统离散滑模控制[J]. 吉林大学学报(工学版), 2018, 48(5): 1492-1499. |
| [13] | 邵克勇, 陈丰, 王婷婷, 王季驰, 周立朋. 无平衡点分数阶混沌系统全状态自适应控制[J]. 吉林大学学报(工学版), 2017, 47(4): 1225-1230. |
| [14] | 王丽, 刘昕晖, 王昕, 陈晋市, 梁燚杰. 装载机数字液压传动系统换挡策略[J]. 吉林大学学报(工学版), 2017, 47(3): 819-826. |
| [15] | 王伟, 王庆年, 田涌君, 王仁广, 温泉. 基于模糊控制功率分流式混合动力客车控制策略[J]. 吉林大学学报(工学版), 2017, 47(2): 337-343. |
|
||