吉林大学学报(工学版) ›› 2022, Vol. 52 ›› Issue (8): 1751-1758.doi: 10.13229/j.cnki.jdxbgxb20210150
• 车辆工程·机械工程 • 上一篇
分布驱动电动汽车电液复合制动最优滑模ABS控制
王骏骋1( ),吕林峰1,李剑敏1,任洁雨2
),吕林峰1,李剑敏1,任洁雨2
- 1.浙江理工大学 机械与自动控制学院,杭州 310018
2.浙江万向马瑞利减震器有限公司,杭州 311200
Optimal sliding mode ABS control for electro⁃hydraulic composite braking of distributed driven electric vehicle
Jun-cheng WANG1(),Lin-feng LYU1,Jian-min LI1,Jie-yu REN2
- 1.School of Mechanical Engineering and Automation,Zhejiang Sci-Tech University,Hangzhou 310018,China
2.Zhejiang Wanxiang Marelli Shock Absorbers,Hangzhou 311200,China
摘要:
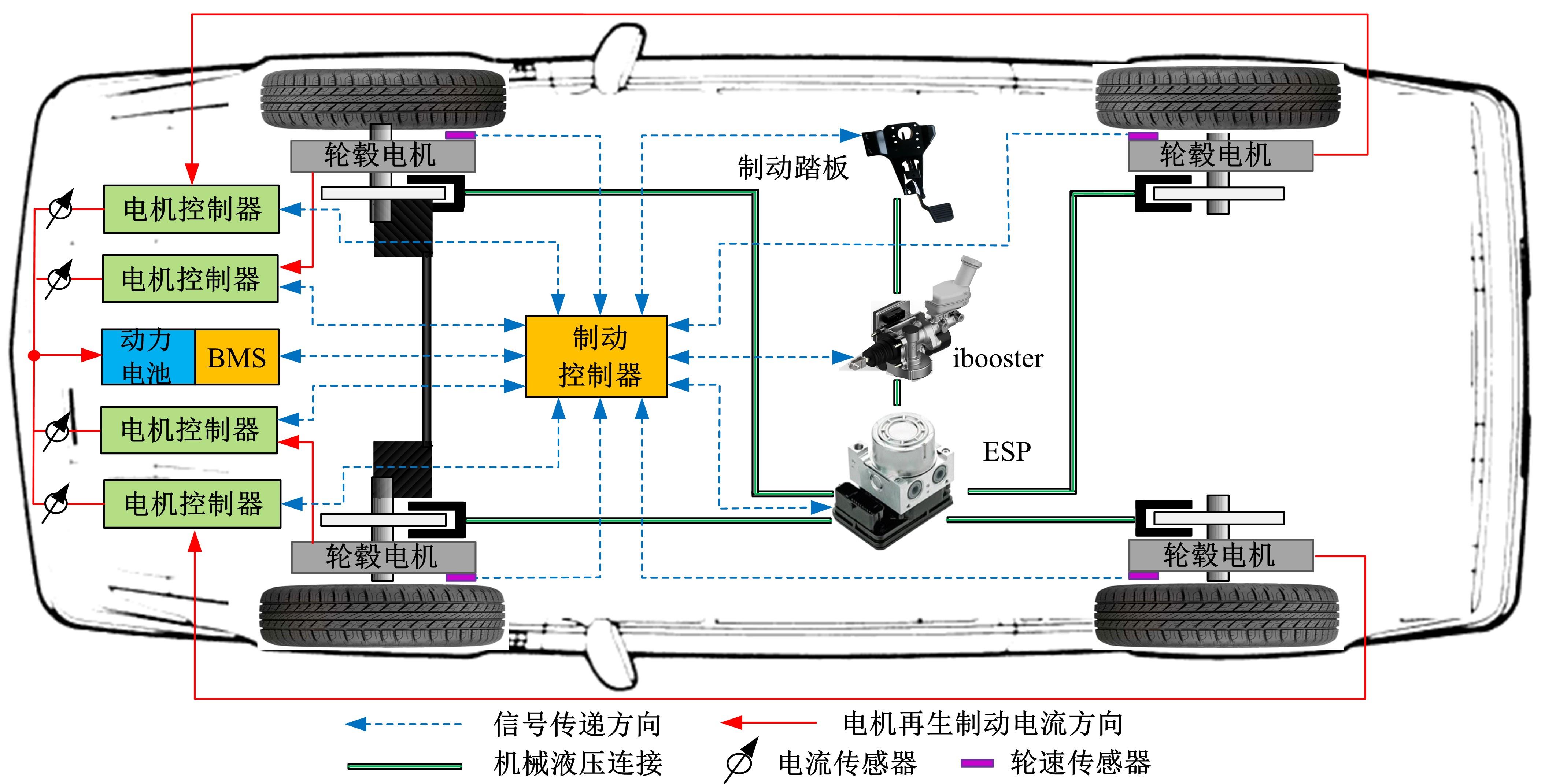
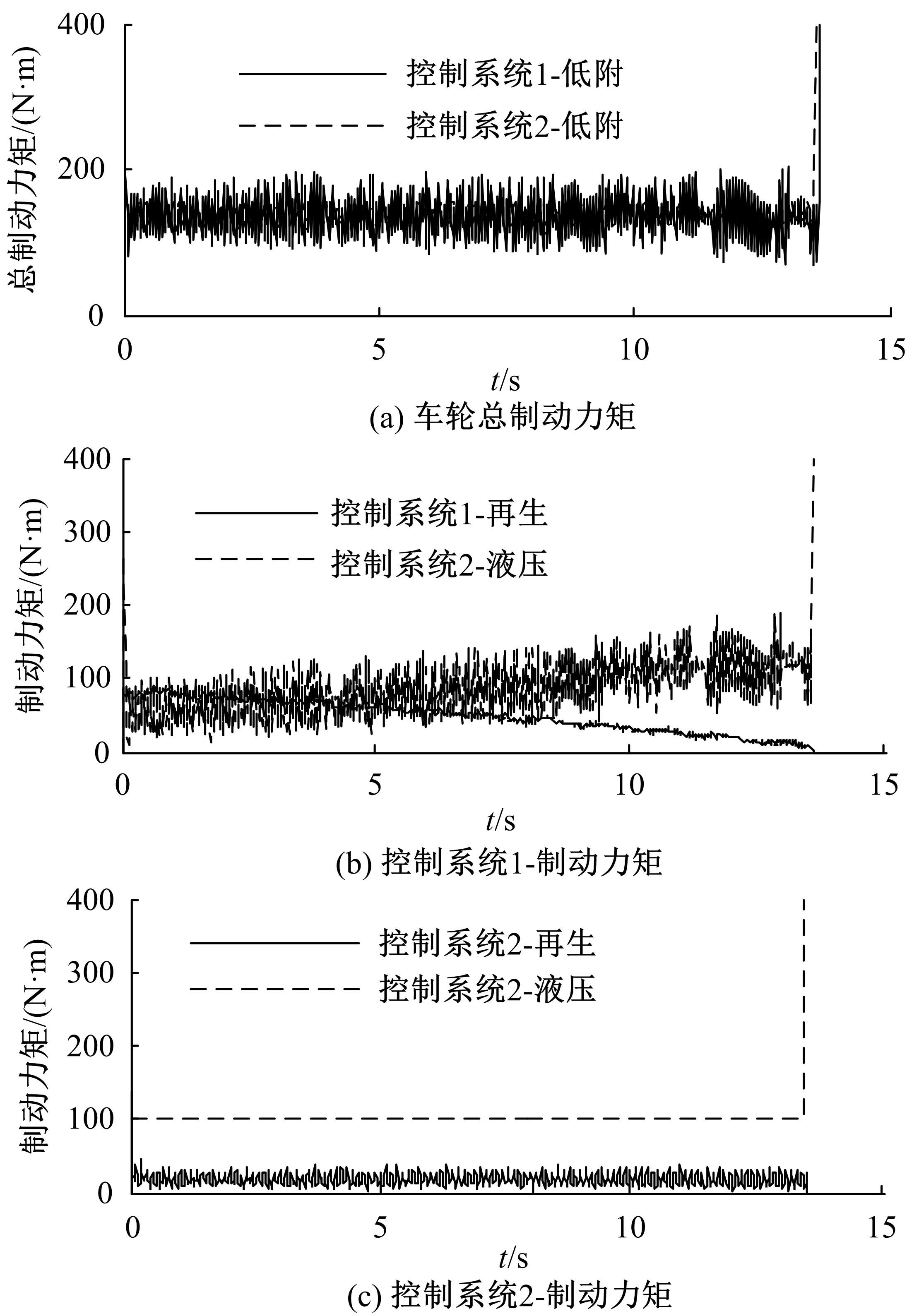
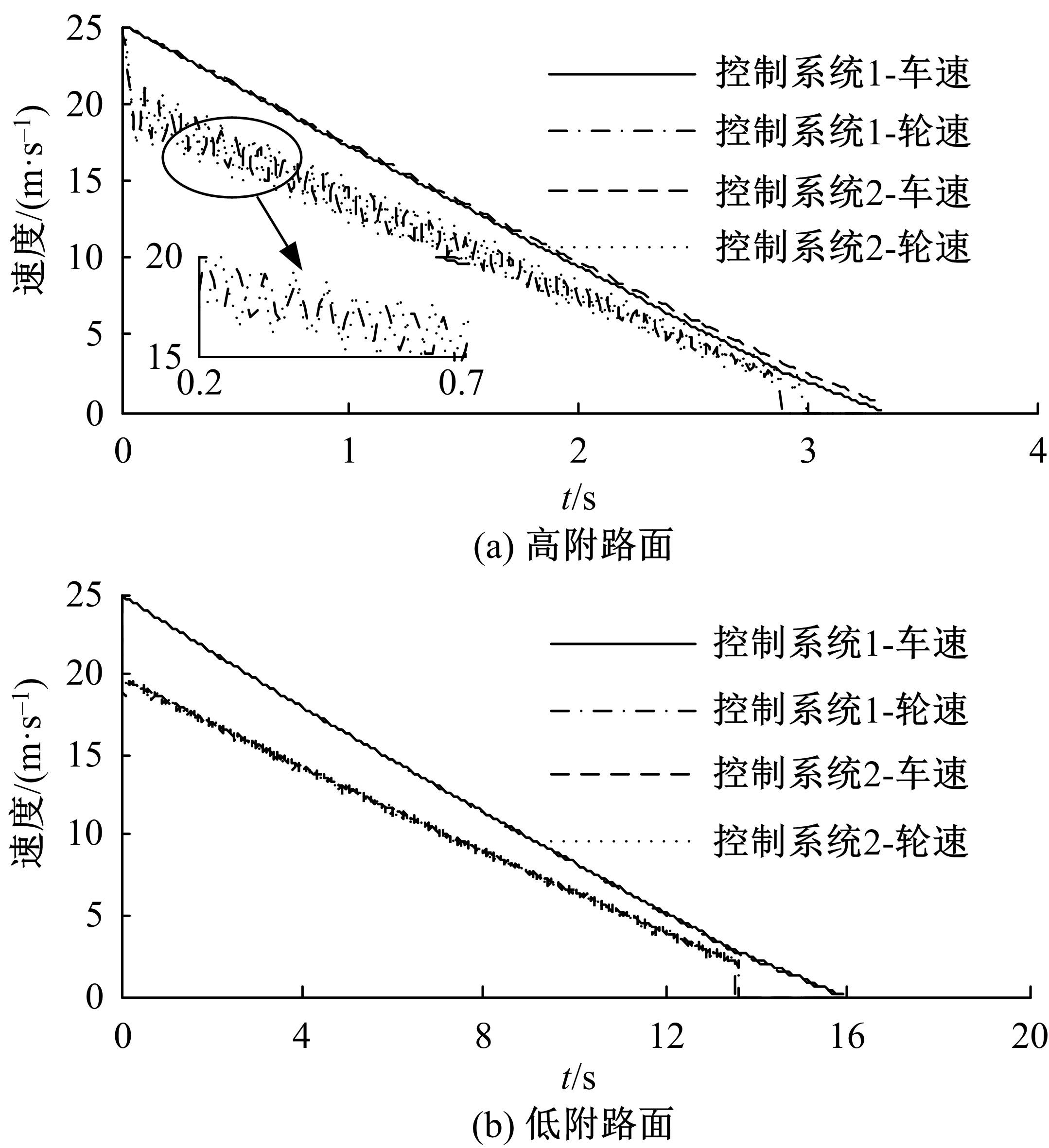
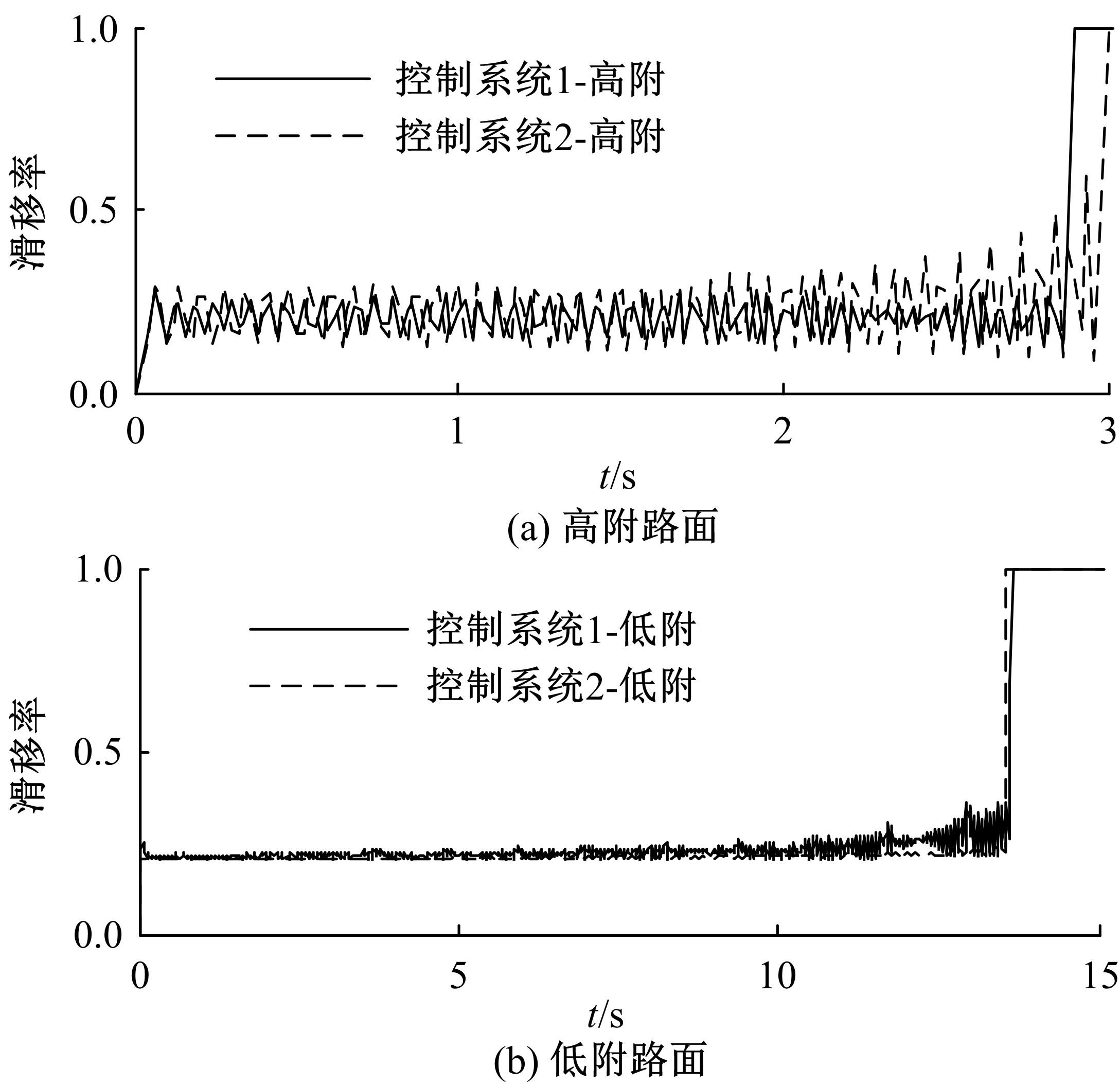
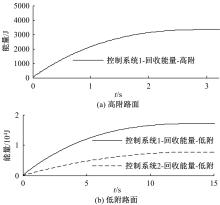
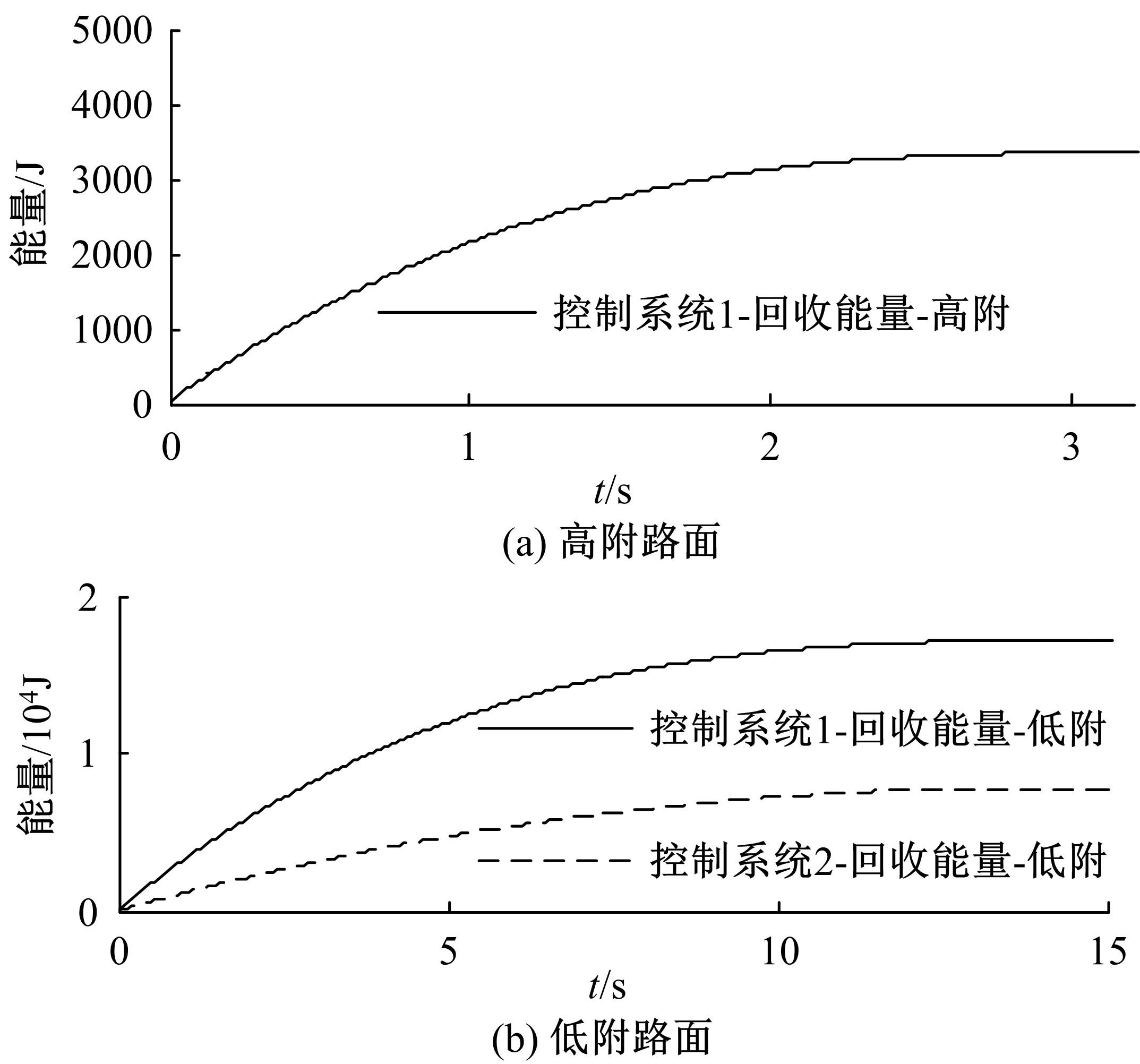
紧急制动过程中分布驱动电动汽车往往会先计算出车轮总需求制动力矩,再二次分配再生-摩擦制动力矩,这样增加了控制复杂性且可能无法充分发挥电机制动能量回收潜力。为了协同提升防抱死控制和制动能量回收效果,设计了一种最优滑模ABS控制系统,将获得最大回馈功率的再生制动力矩作为“干扰向量”的元素之一,制动器摩擦制动力矩作为“控制向量”唯一组成元素,充分发挥最优滑模控制算法可以通过趋近率解补偿干扰向量对控制系统所产生影响的控制特性,在保证制动能量回收效果的前提下省略了制动力矩二次分配过程。仿真结果表明:相比于一般滑模算法控制下进行制动力矩二次分配的ABS控制策略,所提出的最优滑模ABS控制策略能获得更加优越的防抱死控制效果。
中图分类号:
- U461.3




| 1 | Pang H, Zhang X, Xu Z, et al. Adaptive backstepping-based tracking control design for nonlinear active suspension system with parameter uncertainties and safety constraints[J]. Isa Transactions, 2019, 29(1): 23-36. |
| 2 | 王骏骋, 何仁. 面向全制动工况的液压制动双环预测控制策略[J]. 吉林大学学报: 工学版, 2020, 50(3): 820-833. |
| Wang Jun-cheng, He Ren. Double-loop predictive control scheme of hydraulic braking system using in the all braking conditions[J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(3): 820-833. | |
| 3 | Wang J C, He R. Varying charge voltage in steps control method of ABS for in-wheel motors driven electric vehicle based on improved LQG scheme[J]. IEEE Access, 2018, 6: 15039-15050. |
| 4 | Wang C Y, Zhao W Z, Li W. Braking sense consistency strategy of electro-hydraulic composite braking system[J]. Mechanical Systems Signal Processing, 2018, 109: 196-219. |
| 5 | 王骏骋, 何仁. 电动车辆ABS的改进线性二次型最优控制[J]. 哈尔滨工业大学学报, 2018, 50(9): 108-115. |
| Wang Jun-cheng, He Ren. Improved linear quadratic optimal control of ABS for an electric vehicle[J]. Journal of Harbin Institute of Technology, 2018, 50(9): 108-115. | |
| 6 | Heydari S, Fajri P, Sabzehgar R, et al. Optimal brake allocation in electric vehicles for maximizing energy harvesting during braking[J]. IEEE Transacions on Energy Conversion, 2020, 35(4): 1806-1814. |
| 7 | Kunagone K, Werachet K N. Performance evaluation of regenerative braking system based on a HESS in extended range BEV[J]. Journal of Electrical Engineering and Technology, 2018, 13(5): 1965-1977. |
| 8 | 余卓平, 史彪飞, 熊璐, 等. 集成式电子液压制动系统的复合制动协调控制[J]. 同济大学学报: 自然科学版, 2019, 47(6): 851-856. |
| Yu Zhuo-ping, Shi Biao-fei, Xiong Lu, et al. Coordinated control of hybrid braking based on integrated-electric-hydraulic brake system[J]. Journal of Tongji University(Natural Science), 2019, 47(6): 851-856. | |
| 9 | 马金麟, 王新飞, 张厚忠, 等. 电动轮汽车电液复合制动方向稳定性分层控制[J]. 汽车工程, 2019, 41(3): 320-326. |
| Ma Jin-lin, Wang Xin-fei, Zhang Hou-zhong, et al. A study on hierarchical control of directional stability of electric-wheel vehicle with electro-hydraulic braking[J]. Automotive Engineering,2019,41(3):320-326. | |
| 10 | 潘宁, 于良耀, 张雷, 等. 电液复合制动系统防抱控制的舒适性[J]. 浙江大学学报: 工学版, 2017, 51(1): 9-16. |
| Pan Ning, Yu Liang-yao, Zhang Lei, et al. Anti-lock braking control in coordinated braking system considering braking comfort[J]. Journal of Zhejiang University(Engineering Science), 2017, 51(1): 9-16. | |
| 11 | 王骏骋, 何仁. 电动轮轮内主动减振器的非线性最优滑模模糊控制[J]. 汽车工程, 2018, 40(6): 719-725. |
| Wang Jun-cheng, He Ren. Nonlinear optimal sliding mode fuzzy control for in-wheel active vibration damper of electric wheel[J]. Automotive Engineering, 2018, 40(6): 719-725. | |
| 12 | Wang J C, He R, Kim Y B. Optimal anti-lock braking control with nonlinear variable voltage charging scheme for an electric vehicle[J]. IEEE Transactions on Vehicular Technology, 2020, 69(7): 7211-7222. |
| 13 | 余卓平, 左建令, 陈慧. 基于四轮轮边驱动电动车的路面附着系数估算方法[J]. 汽车工程, 2007, 29(2): 141-145. |
| Yu Zhuo-ping, Zuo Jian-ling, Chen Hui. Tire-road friction coefficient estimation with four wheel in-wheel-motor drive vehicle[J]. Automotive Engineering, 2007, 29(2): 141-145. | |
| 14 | 李静, 石求军, 刘鹏, 等. 基于纵向车速估算的商用车ABS神经网络滑模控制[J]. 吉林大学学报: 工学版, 2019, 49(4): 1017-1025. |
| Li Jing, Shi Qiu-jun, Liu Peng, et al. Neural network sliding mode control of commercial vehicle ABS based on longitudinal vehicle speed estimation[J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(4): 1017-1025. | |
| 15 | 王骏骋,何仁.轮毂电机电动汽车的变压充电再生制动控制[J].机械工程学报, 2020, 56(10): 181-190. |
| Wang Jun-cheng, He Ren. Voltage variable charging regenerative braking control strategy for in-wheel motors driven vehicle[J]. Journal of Mechanical Engineering, 2020, 56(10): 181-190. | |
| 16 | 张雷, 于良耀, 宋健, 等. 电动汽车再生制动与液压制动防抱死协调控制[J]. 清华大学学报: 工学版, 2016, 56(2): 152-159. |
| Zhang Lei, Yu Liang-yao, Song Jian, et al. Coordinated anti-lock braking control of regenerative and hydraulic braking systems in electric vehicles[J]. Journal of Tsinghua University(Science and Technology), 2016, 56(2): 152-159. |
| [1] | 刘汉武,雷雨龙,阴晓峰,付尧,李兴忠. 增程式电动汽车增程器多点控制策略优化[J]. 吉林大学学报(工学版), 2022, 52(8): 1741-1750. |
| [2] | 高青,王浩东,刘玉彬,金石,陈宇. 动力电池应急冷却喷射模式实验分析[J]. 吉林大学学报(工学版), 2022, 52(8): 1733-1740. |
| [3] | 杨红波,史文库,陈志勇,郭年程,赵燕燕. 基于某二级减速齿轮系统的齿面修形优化[J]. 吉林大学学报(工学版), 2022, 52(7): 1541-1551. |
| [4] | 聂光明,谢波,田彦涛. 基于Frenet框架的协同自适应巡航控制算法设计[J]. 吉林大学学报(工学版), 2022, 52(7): 1687-1695. |
| [5] | 张家旭,郭崇,王晨,赵健,王欣志. 基于半实物仿真平台的自动泊车系统性能评价[J]. 吉林大学学报(工学版), 2022, 52(7): 1552-1560. |
| [6] | 郝帅,程川泰,王军年,张君媛,俞有. 运动型SUV驾驶室布置人机优化设计与测试评价[J]. 吉林大学学报(工学版), 2022, 52(7): 1477-1488. |
| [7] | 华琛,牛润新,余彪. 地面车辆机动性评估方法与应用[J]. 吉林大学学报(工学版), 2022, 52(6): 1229-1244. |
| [8] | 李雄,兰凤崇,陈吉清,童芳. Hybird III假人模型与CHUBM人体生物力学模型的正碰损伤对比[J]. 吉林大学学报(工学版), 2022, 52(6): 1264-1272. |
| [9] | 刘兴涛,刘晓剑,武骥,何耀,刘新天. 基于曲线压缩和极限梯度提升算法的锂离子电池健康状态估计[J]. 吉林大学学报(工学版), 2022, 52(6): 1273-1280. |
| [10] | 张英朝,李昀航,郭子瑜,王国华,张喆,苏畅. 长头重型卡车气动减阻优化[J]. 吉林大学学报(工学版), 2022, 52(4): 745-753. |
| [11] | 史文库,张曙光,张友坤,陈志勇,江逸飞,林彬斌. 基于改进海鸥算法的磁流变减振器模型辨识[J]. 吉林大学学报(工学版), 2022, 52(4): 764-772. |
| [12] | 李杰,陈涛,郭文翠,赵旗. 汽车非平稳随机振动空间域虚拟激励法及应用[J]. 吉林大学学报(工学版), 2022, 52(4): 738-744. |
| [13] | 李伟,宋海生,陆浩宇,史文库,王强,王晓俊. 复合材料板簧迟滞特性线性辨识方法[J]. 吉林大学学报(工学版), 2022, 52(4): 829-836. |
| [14] | 庄蔚敏,陈沈,吴迪. 碳纤维增强复合材料包裹强化形式对钢管横向冲击性能的影响[J]. 吉林大学学报(工学版), 2022, 52(4): 819-828. |
| [15] | 段亮,宋春元,刘超,魏苇,吕成吉. 基于机器学习的高速列车轴承温度状态识别[J]. 吉林大学学报(工学版), 2022, 52(1): 53-62. |
|
||