吉林大学学报(工学版) ›› 2022, Vol. 52 ›› Issue (7): 1552-1560.doi: 10.13229/j.cnki.jdxbgxb20210142
• 车辆工程·机械工程 • 上一篇
基于半实物仿真平台的自动泊车系统性能评价
张家旭1,2( ),郭崇1,王晨1,赵健1(),王欣志1
),郭崇1,王晨1,赵健1(),王欣志1
- 1.吉林大学 汽车仿真与控制国家重点实验室,长春 130022
2.中国第一汽车集团有限公司 智能网联研发院,长春 130011
Performance evaluation of automatic parking system based on hardware in the loop simulation platform
Jia-xu ZHANG1,2(),Chong GUO1,Chen WANG1,Jian ZHAO1(),Xin-zhi WANG1
- 1.State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun 130022,China
2.Intelligent Network R&D Institute,China FAW Group Co. ,Ltd. ,Changchun 130011,China
摘要:
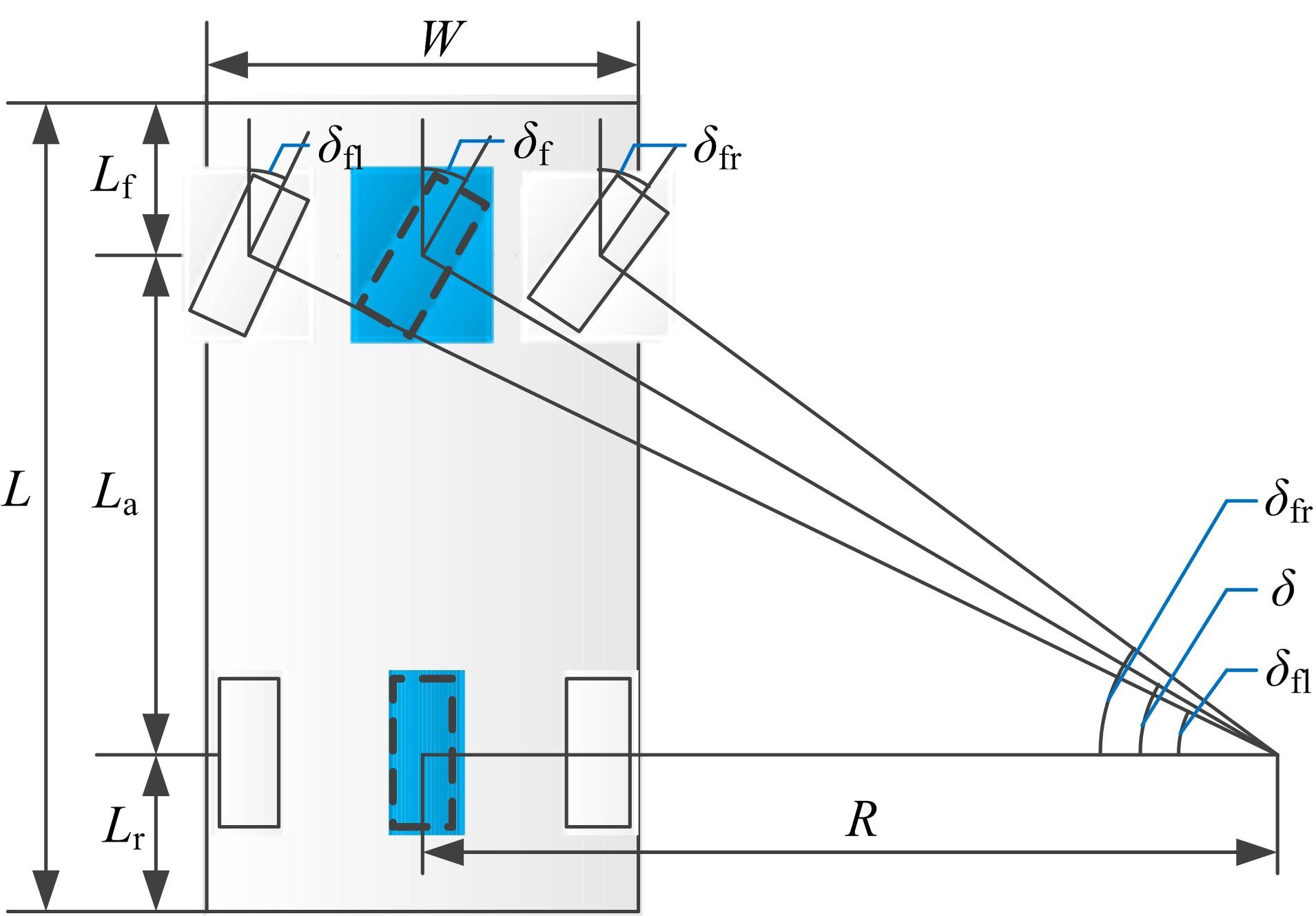
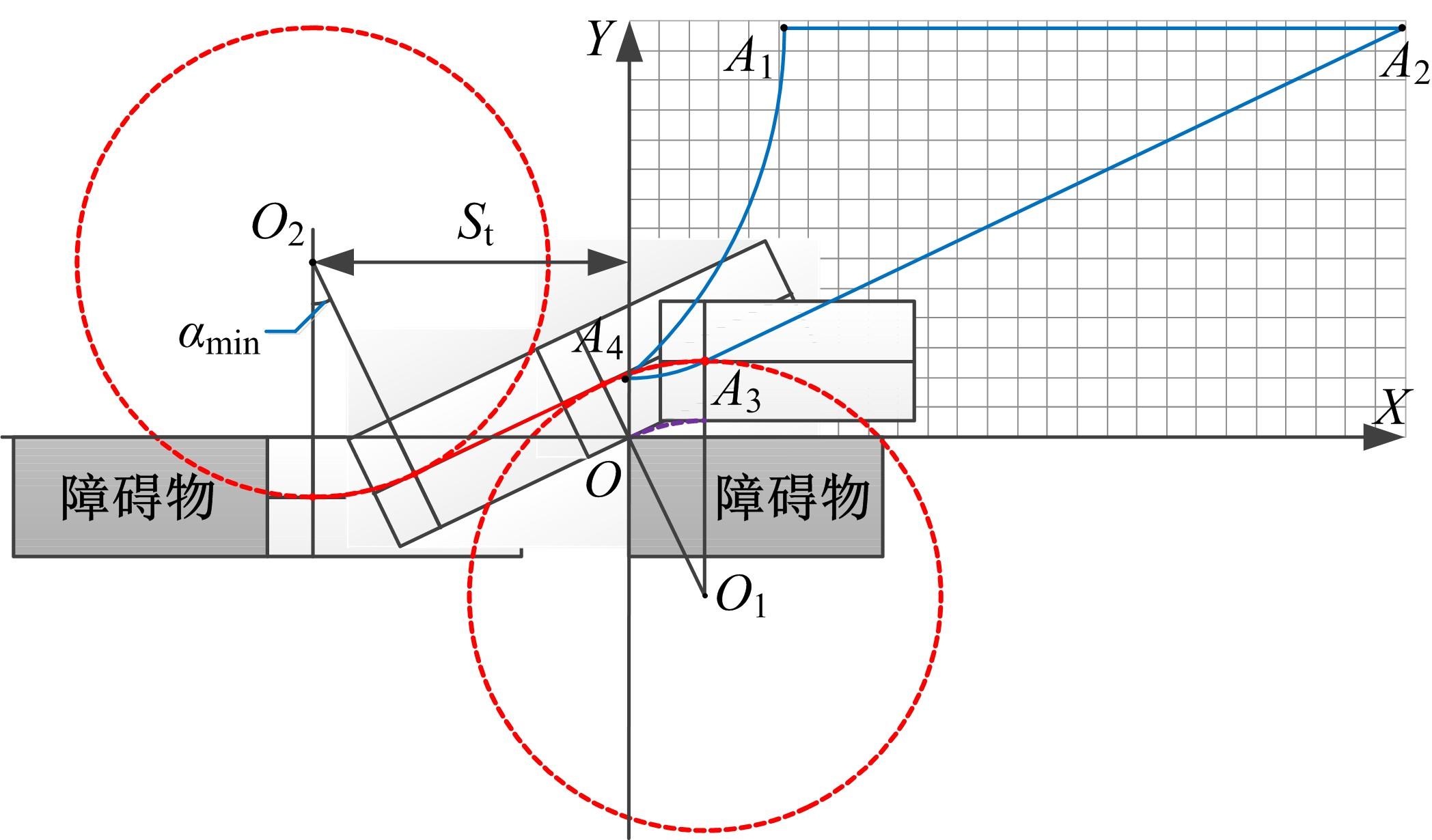
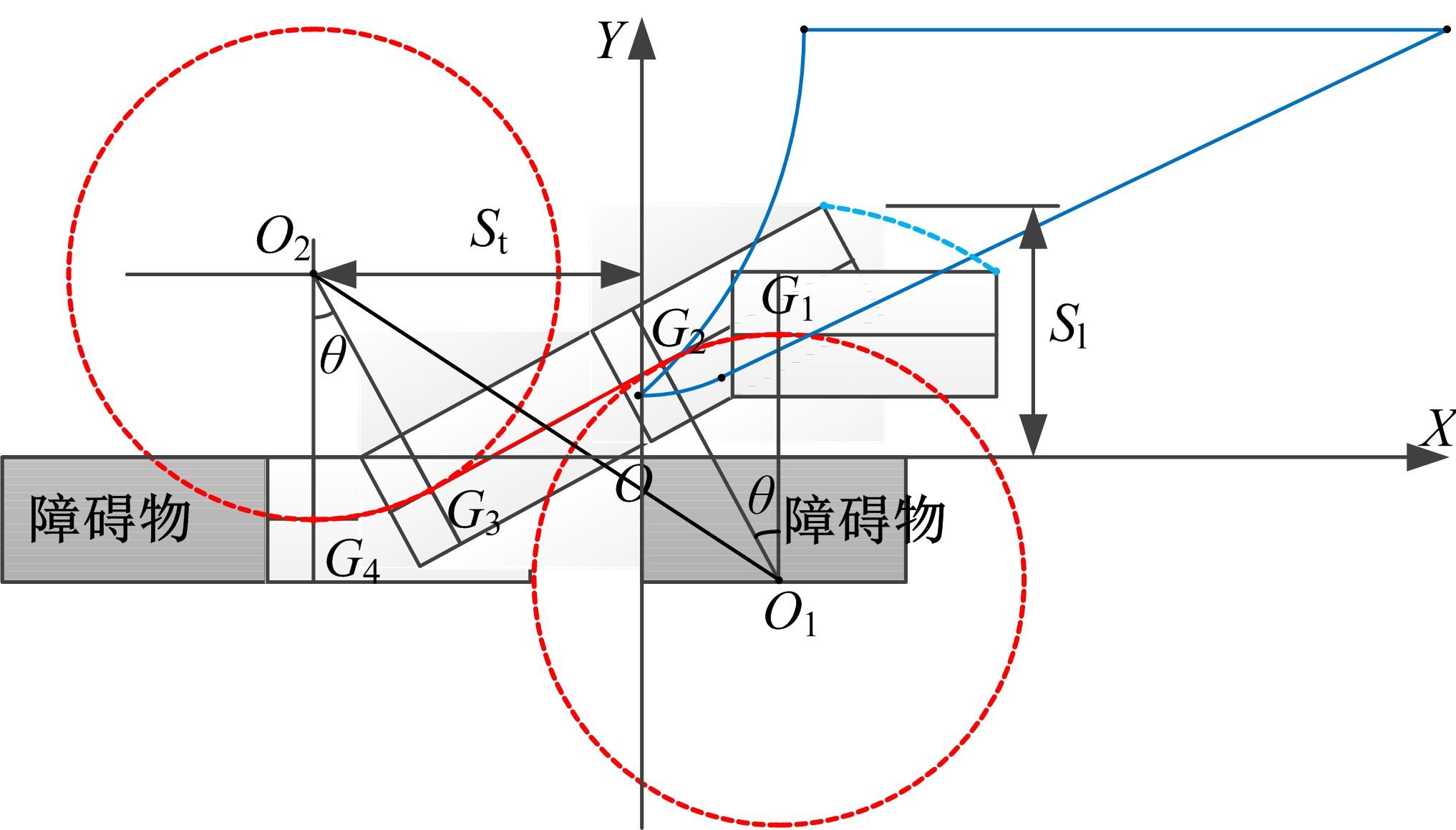
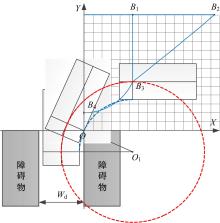
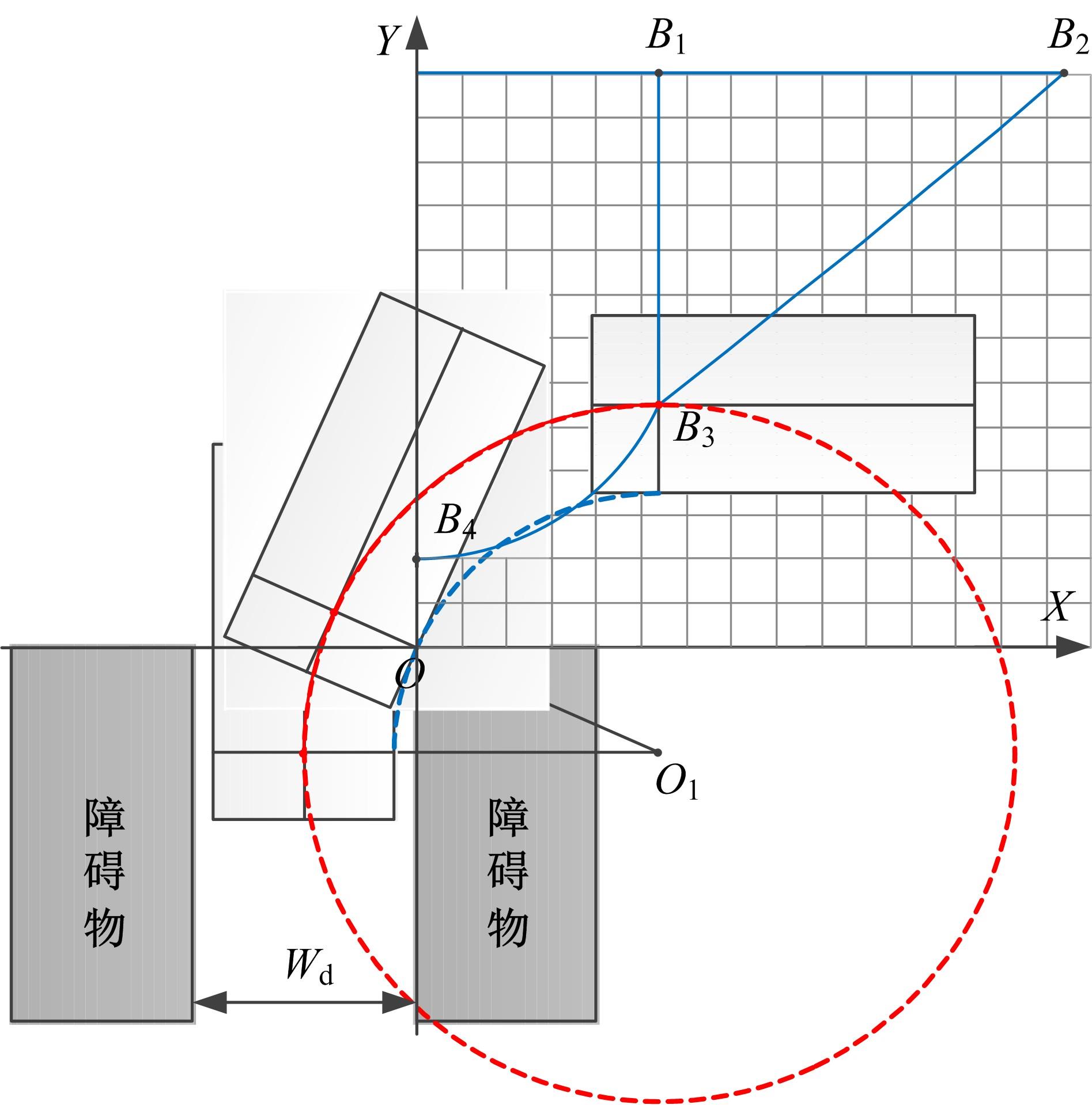
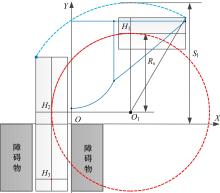
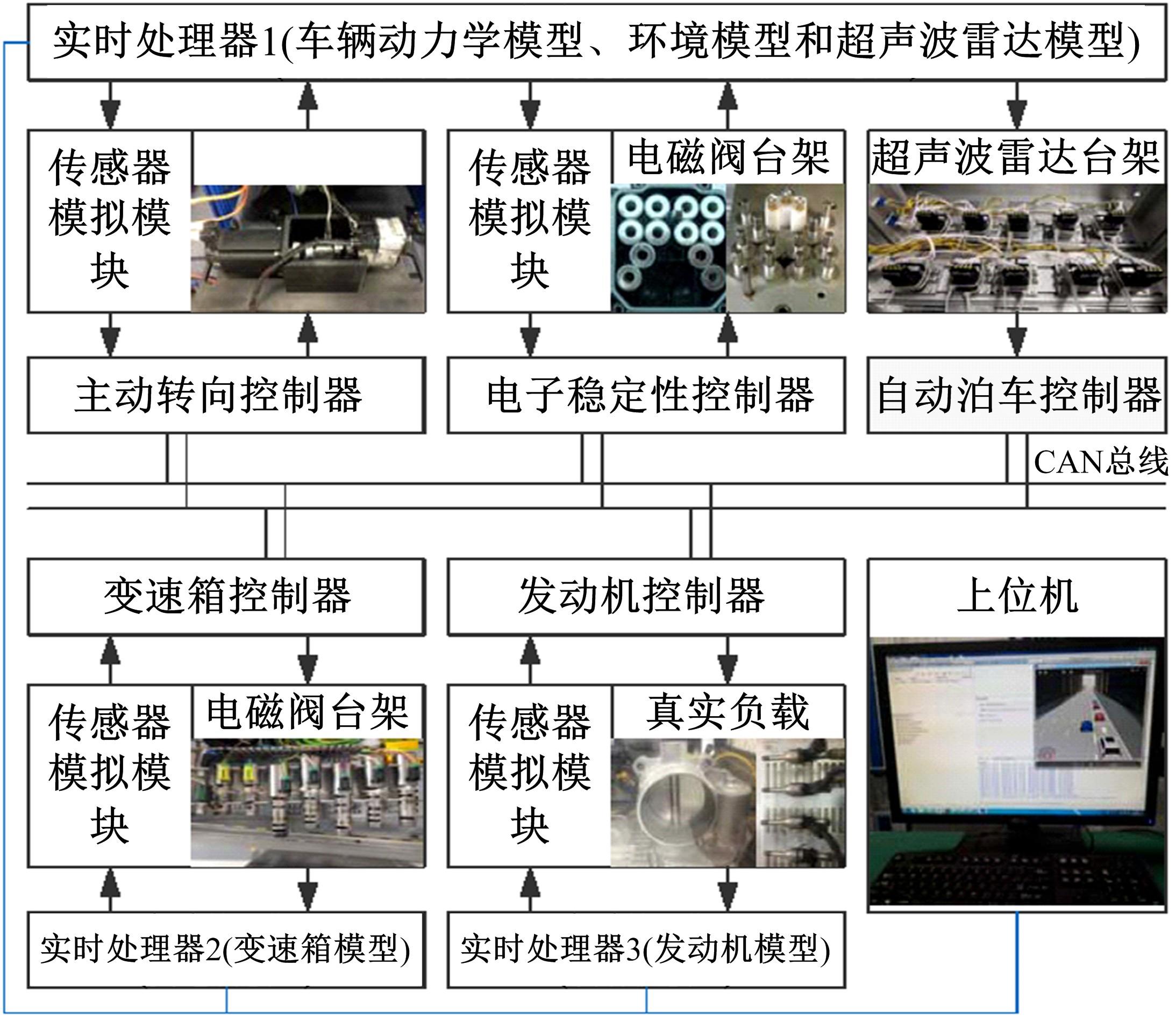
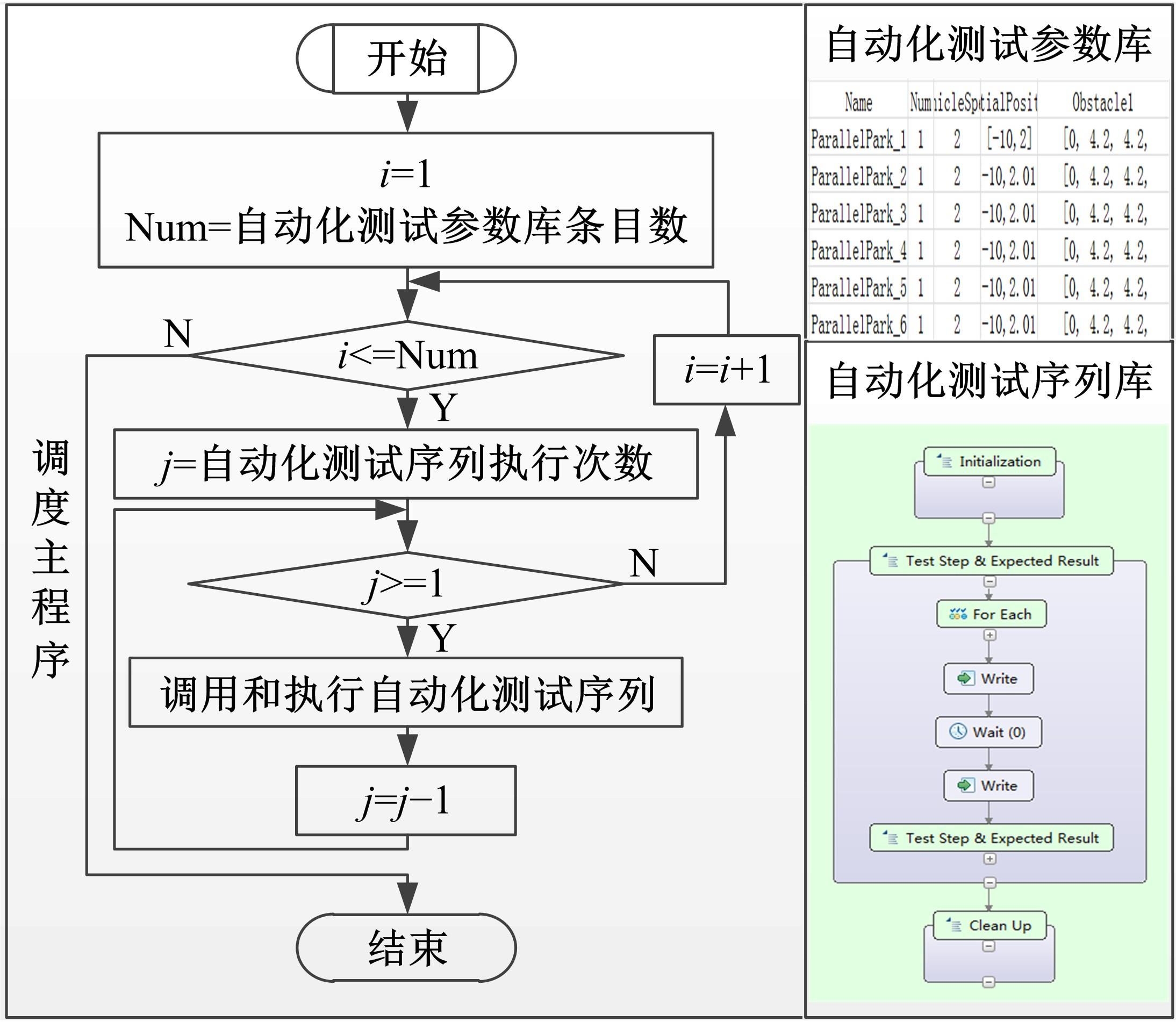
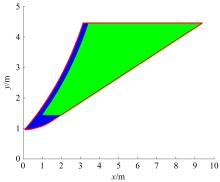
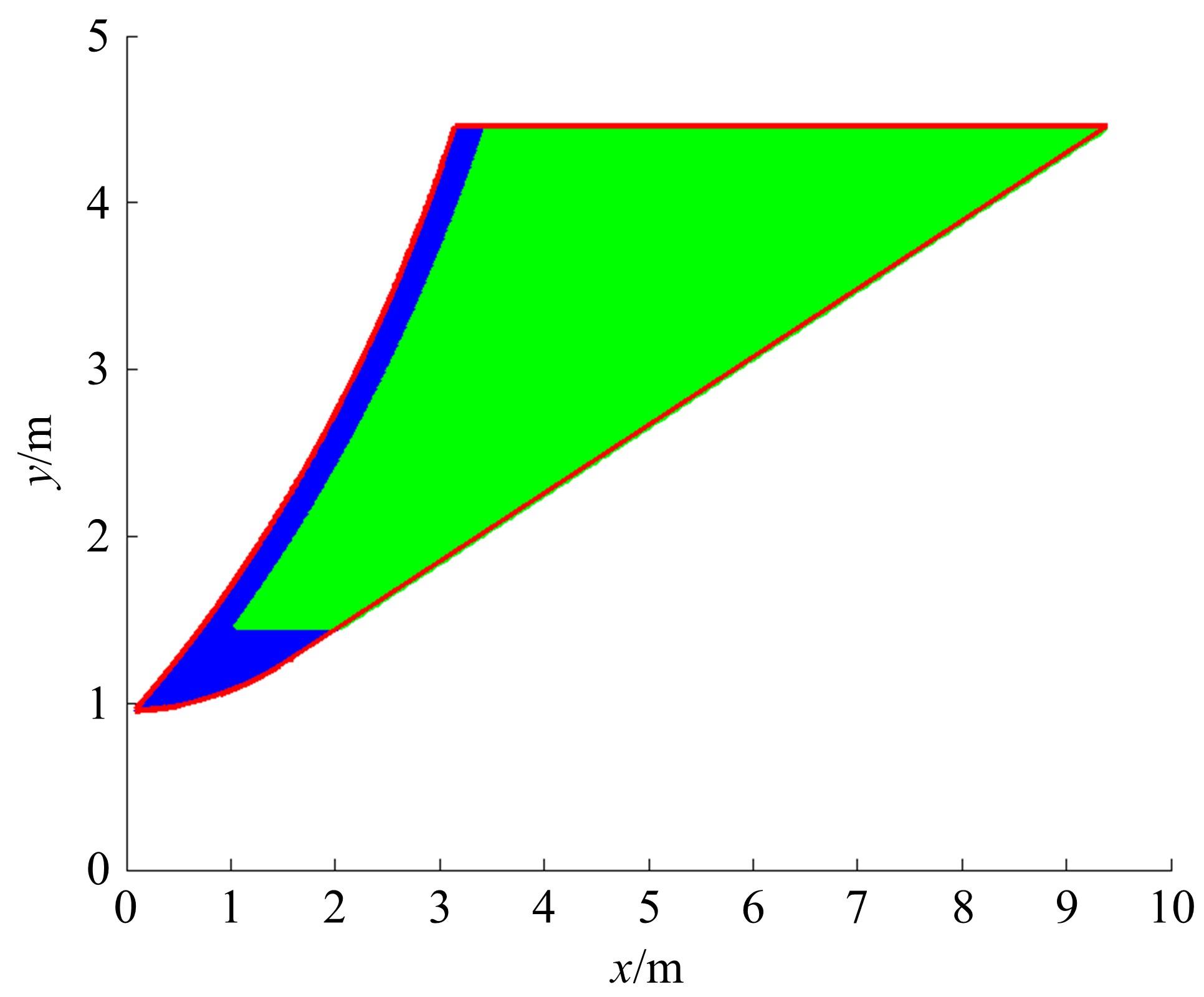
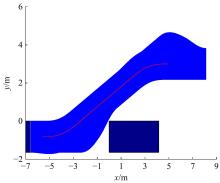
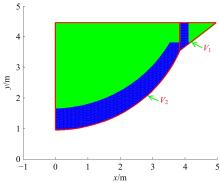
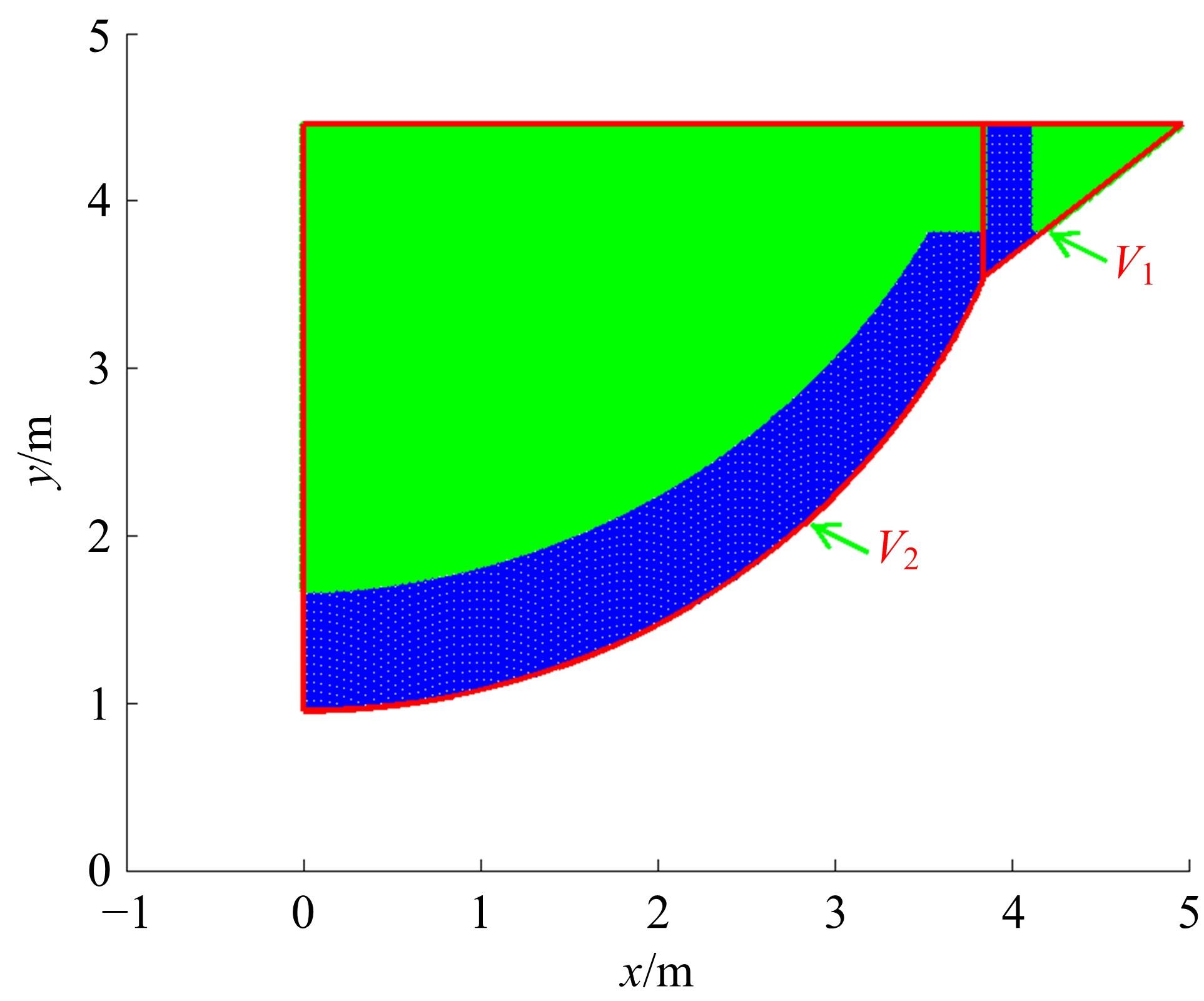
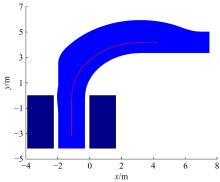
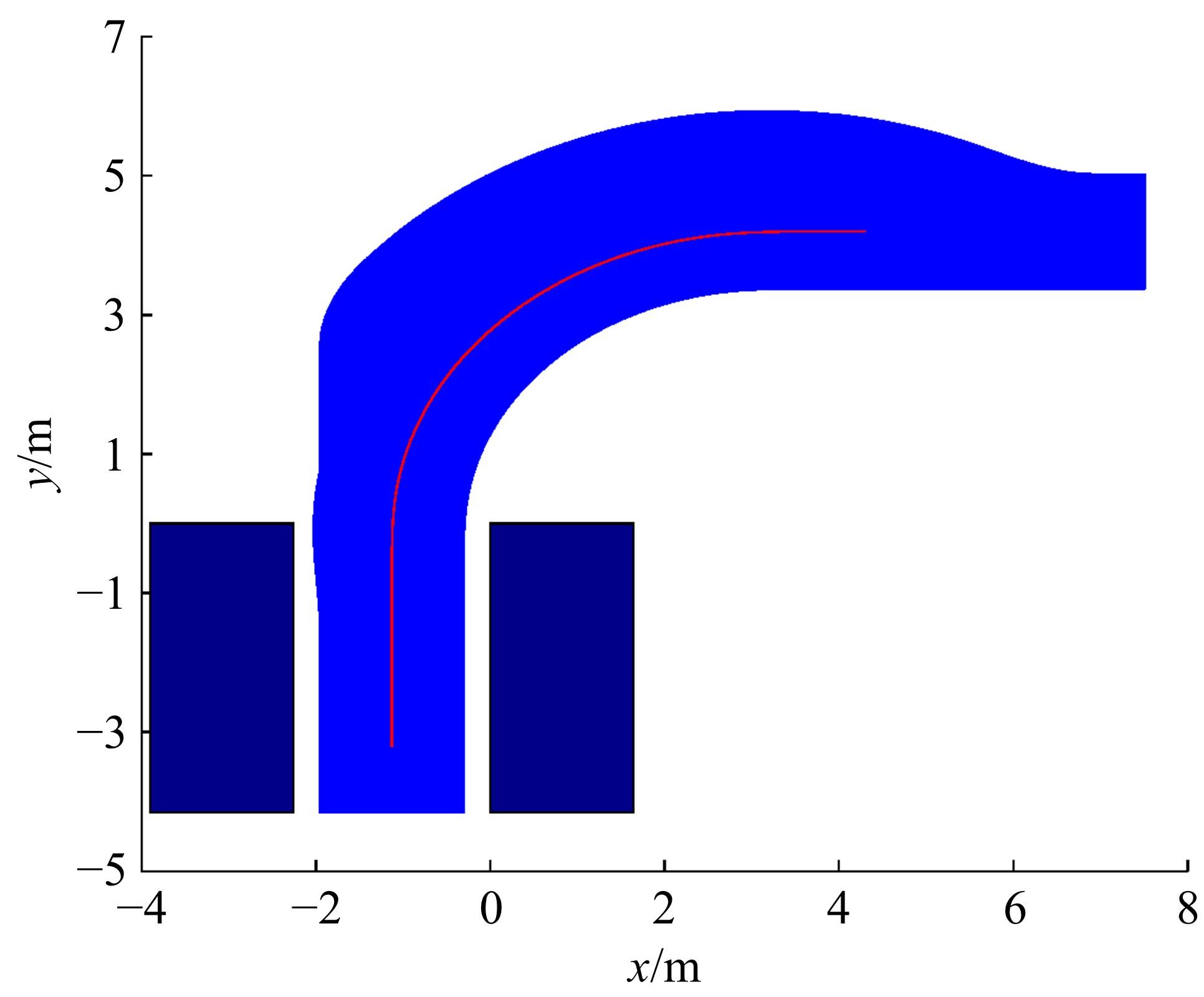
针对现阶段难以量化评价自动泊车系统在狭窄环境内的泊车成功率问题,提出一种基于半实物仿真平台的自动泊车系统性能评价方法。首先,以最大化平行泊车和垂直泊车场景可行泊车起始区域为目标,基于圆弧-直线组合方式建立可行泊车起始区域边界和泊车过程最小侧向空间描述,并通过分割法计算出可行泊车起始区域面积。随后,建立自动泊车系统的半实物仿真平台,并利用Python脚本语言设计自动泊车系统的自动化测试框架,实现自动泊车系统的自动化测试。将基于半实物仿真平台自动化测试得到的实际泊车起始区域面积与可行泊车起始区域面积的比值作为自动泊车系统在狭窄环境内泊车成功率的量化指标,弥补自动泊车系统现有性能评价方法的局限性。最后,将某汽车零部件供应商的自动泊车系统作为测试对象,对所提出的性能评价方法进行了实践,结果表明:所提出的自动泊车系统性能评价方法可行高效,并且可对测试对象提出改进意见。
中图分类号:
- U461.1






| 1 | Tan J Y, Xu C L, Li L, et al. Guidance control for parallel parking tasks[J]. IEEE/CAA Journal of Automatica Sinica, 2020, 7(1): 301-306. |
| 2 | Li B, Wang K X, Shao Z J. Time optimal maneuver planning in automatic parallel parking using s simultaneous dynamic optimization approach[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(11): 3263-3274. |
| 3 | Suhr J K, Jung H G. Automatic parking space detection and tracking for underground and indoor environments[J]. IEEE Transactions on Industrial Electronics, 2016, 63(9): 5687-5698. |
| 4 | Jang C, Kim C, Lee S, et al. Re-plannable automated parking system with a standalone around view monitor for narrow parking lots[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(2): 777-790. |
| 5 | 张家旭, 赵健, 施正堂, 等. 基于回旋曲线的垂直泊车轨迹规划与跟踪控制[J]. 东南大学学报:自然科学版, 2020, 50(1): 182-191. |
| Zhang Jia-xu, Zhao Jian, Shi Zheng-tang, et al. Trajectory planning and tracking control perpendicular parking based on clothoid curve[J]. Journal of Southeast University (Natural Science Edition), 2020, 50(1): 182-191. | |
| 6 | Zhang X J, Liniger A, Sakai A, et al. Autonomous parking using optimization-based collision avoidance[C]∥IEEE Conference on Decision and Control, Miami Beach, USA, 2018: 4627-4632. |
| 7 | Zips P, Bock M, Kugi A. Optimisation based path planning for car parking in narrow environments[J]. Robotics and Autonomous Systems, 2016, 79: 1-11. |
| 8 | Du X X, Tan K K. Autonomous reverse parking system based on robust path generation and improved sliding model control[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(3): 1225-1237. |
| 9 | 张家旭, 赵健, 施正堂, 等. 采用hp自适应伪谱法的全自动泊车系统轨迹规划与跟踪控制[J]. 西安交通大学学报, 2020, 54(6): 176-184. |
| Zhang Jia-xu, Zhao Jian, Shi Zheng-tang, et al. A trajectory planning and tracking control method for fully-automatic parking system using hp-adaptive pseudo spectral method[J]. Journal of Xi'an Jiaotong University, 2020, 54(6): 176-184. | |
| 10 | Sun C Y, Zhang X, Xi L H, et al. Design of a path-tracking steering controller for autonomous vehicles[J]. Energies, 2018, 11(6): 1-17. |
| 11 | . Intelligent transport systems—assisted parking system (APS)—performance requirements and test procedures [S]. |
| 12 | IVISTA-APS, 2019. 智能泊车辅助系统性能要求和测试规程(征求意见稿) [S]. |
| 13 | 周莎, 钟颖, 闫晓雷. 自动泊车系统性能评价方法[J]. 长安大学学报:自然科学版, 2020, 40(2): 109-116. |
| Zhou Sha, Zhong Ying, Yan Xiao-lei. Evaluation method of automatic parking system performance[J]. Journal of Chang'an University (Natural Science Edition), 2020, 40(2): 109-116. | |
| 14 | Reeds J, Shepp L. Optimal paths for a car that goes both forwards and backwards[J]. Pacific Journal of Mathematics, 1990, 145(2): 367-393. |
| 15 | Zhang J X, Shi Z T, Yang X, et al. Trajectory planning and tracking control for autonomous parallel parking of a non-holonomic vehicle[J]. Measurement and Control, 2020, 50(1): 182-191. |
| 16 | 张家旭, 赵健, 施正堂, 等. 基于回旋曲线的平行泊车路径规划与跟踪控制[J]. 吉林大学学报:工学版, 2020, 50(6): 2247-2257. |
| Zhang Jia-Xu, Zhao Jian, Shi Zheng-tang, et al. Path planning and tracking control for parallel parking based on clothoid curve[J]. Journal of Jilin University (Engineering and Technology Edition), 2020, 50(6): 2247-2257. | |
| 17 | Tan J Y, Xu C L, Li L, et al. Guidance control for parallel parking tasks[J]. IEEE/CAA Journal of Automatica Sinica, 2020, 7(1): 301-306. |
| 18 | Jeong Y, Kim S, Jo B R, et al. Sample based vehicle motion planning for autonomous valet parking with moving obstacles[J]. International Journal of Automotive Engineering, 2018, 9(4): 215-222. |
| [1] | 杨红波,史文库,陈志勇,郭年程,赵燕燕. 基于某二级减速齿轮系统的齿面修形优化[J]. 吉林大学学报(工学版), 2022, 52(7): 1541-1551. |
| [2] | 郝帅,程川泰,王军年,张君媛,俞有. 运动型SUV驾驶室布置人机优化设计与测试评价[J]. 吉林大学学报(工学版), 2022, 52(7): 1477-1488. |
| [3] | 华琛,牛润新,余彪. 地面车辆机动性评估方法与应用[J]. 吉林大学学报(工学版), 2022, 52(6): 1229-1244. |
| [4] | 李雄,兰凤崇,陈吉清,童芳. Hybird III假人模型与CHUBM人体生物力学模型的正碰损伤对比[J]. 吉林大学学报(工学版), 2022, 52(6): 1264-1272. |
| [5] | 刘兴涛,刘晓剑,武骥,何耀,刘新天. 基于曲线压缩和极限梯度提升算法的锂离子电池健康状态估计[J]. 吉林大学学报(工学版), 2022, 52(6): 1273-1280. |
| [6] | 张英朝,李昀航,郭子瑜,王国华,张喆,苏畅. 长头重型卡车气动减阻优化[J]. 吉林大学学报(工学版), 2022, 52(4): 745-753. |
| [7] | 史文库,张曙光,张友坤,陈志勇,江逸飞,林彬斌. 基于改进海鸥算法的磁流变减振器模型辨识[J]. 吉林大学学报(工学版), 2022, 52(4): 764-772. |
| [8] | 庄蔚敏,陈沈,吴迪. 碳纤维增强复合材料包裹强化形式对钢管横向冲击性能的影响[J]. 吉林大学学报(工学版), 2022, 52(4): 819-828. |
| [9] | 李杰,陈涛,郭文翠,赵旗. 汽车非平稳随机振动空间域虚拟激励法及应用[J]. 吉林大学学报(工学版), 2022, 52(4): 738-744. |
| [10] | 李伟,宋海生,陆浩宇,史文库,王强,王晓俊. 复合材料板簧迟滞特性线性辨识方法[J]. 吉林大学学报(工学版), 2022, 52(4): 829-836. |
| [11] | 段亮,宋春元,刘超,魏苇,吕成吉. 基于机器学习的高速列车轴承温度状态识别[J]. 吉林大学学报(工学版), 2022, 52(1): 53-62. |
| [12] | 庄蔚敏,陈沈,王楠. 温度对车身钢铝胶铆连接结构热应力变化的影响[J]. 吉林大学学报(工学版), 2022, 52(1): 70-78. |
| [13] | 陈剑斌,周宋泽,费峰永,陈永龙,凌国平. 过盈量及滚花方式对装配式凸轮轴压装失效的影响[J]. 吉林大学学报(工学版), 2021, 51(6): 1959-1966. |
| [14] | 胡兴军,张靖龙,罗雨霏,辛俐,李胜,胡金蕊,兰巍. 冷却管结构及进气方向对空冷中冷器性能的影响[J]. 吉林大学学报(工学版), 2021, 51(6): 1933-1942. |
| [15] | 罗勇,韦永恒,黄欢,肖人杰,任淋,崔环宇. 驾驶员意图识别的P2.5插混构型双离合器起步控制[J]. 吉林大学学报(工学版), 2021, 51(5): 1575-1582. |
|
||