吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (2): 584-592.doi: 10.13229/j.cnki.jdxbgxb20210618
基于残差网络的弯道增强车道线检测方法
时小虎1,2( ),吴佳琦1,吴春国1,2,程石1,翁小辉3,常志勇4,5()
),吴佳琦1,吴春国1,2,程石1,翁小辉3,常志勇4,5()
- 1.吉林大学 计算机科学与技术学院,长春 130012
2.吉林大学 符号计算与知识工程教育部重点实验室,长春 130012
3.吉林大学 机械与航空航天工程学院,长春 130022
4.吉林大学 生物与农业工程学院,长春 130022
5.吉林大学 工程仿生教育部重点实验室,长春 130022
Residual network based curve enhanced lane detection method
Xiao-hu SHI1,2(),Jia-qi WU1,Chun-guo WU1,2,Shi CHENG1,Xiao-hui WENG3,Zhi-yong CHANG4,5()
- 1.College of Computer Science and Technology,Jilin University,Changchun 130012,China
2.Key Laboratory of Symbol Computation and Knowledge Engineering of Ministry of Education,Jilin University,Changchun 130012,China
3.School of Mechanical and Aerospace Engineering,Jilin University,Changchun 130022,China
4.College of Biological and Agricultural Engineering,Jilin University,Changchun 130022,China
5.Key Laboratory of Bionic Engineering of Ministry of Education,Jilin University,Changchun 130022,China
摘要:
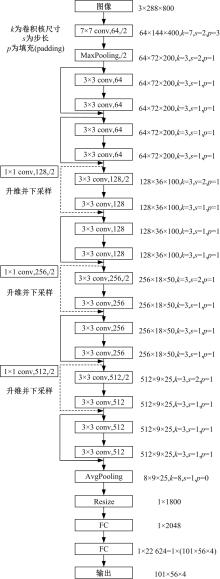
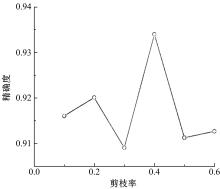
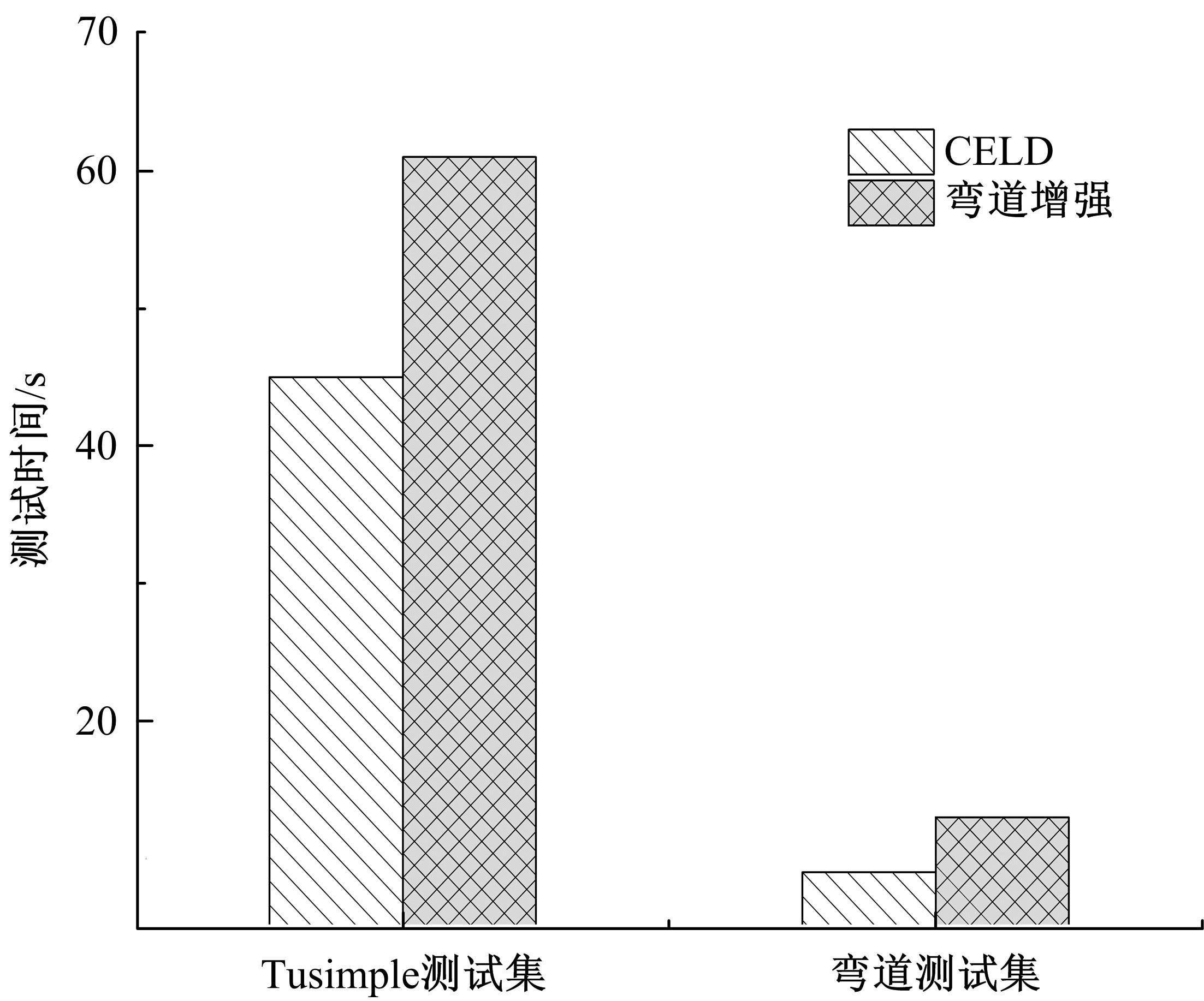
本文以提高弯道检测效果为主要目的,并综合考虑检测速度,提出了一种基于残差网络的弯道增强车道线检测方法。该方法采用残差网络为主体框架,通过在损失函数中加入弯道结构约束条件实现弯道增强;另一方面,为降低模型的复杂度,采用权值稀疏剪枝技术对模型进行缩减。实验结果表明:本文提出的弯道增强策略有效提高了在弯道场景下的算法性能,且对直线车道的检测性能影响较小。加入了权值稀疏剪枝策略之后,算法在性能未明显下降的前提下大幅度减少了计算时间,更符合实际生产需求。
中图分类号:
- TP391.4






| 1 | Xu Z, Shin B, Klette R. Accurate and robust line segment extraction using minimum entropy with hough transform[J]. IEEE Transactions Image Process, 2015, 24(3): 813-822. |
| 2 | Hillel A B, Lerner R, Levi D, et al. Recent progress in road and lane detection: a survey[J]. Machine Vision and Applications, 2014, 25(3): 727-745. |
| 3 | Lookingbill A, Rogers J, Lieb D, et al. Reverse optical flow for self-supervised adaptive autonomous robot navigation[J]. International Journal of Computer Vision, 2007, 74(3): 287-302. |
| 4 | Li X Y, Fang X Z, Wang C, et al. Lane detection and tracking using a parallel-snake approach[J]. Journal of Intelligent & Robotic Systems, 2015, 77(3): 597-609. |
| 5 | Borkar A, Hayes M, Smith M T. Polar randomized hough transform for lane detection using loose constraints of parallel lines[C]∥IEEE International Conference on Acoustics, Speech and Signal Processing, Prague, Czech Republic, 2011: 1037-1040. |
| 6 | Lee C, Moon J H. Robust lane detection and tracking for real-time applications[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(12): 4043-4048. |
| 7 | Suddamalla U, Kundu S, Farkade S, et al. A novel algorithm of lane detection addressing varied scenarios of curved and dashed lanemarks[C] ∥International Conference on Image Processing Theory, Tools and Applications, Orléans, France, 2015: 87-92. |
| 8 | 贾阳, 王荣本, 余天洪, 等. 基于熵最大化边缘提取的直线型车道标识线识别及跟踪方法[J]. 吉林大学学报: 工学版, 2005, 35(4): 420-425. |
| Jia Yang, Wang Rong-ben, Yu Tian-hong, et al. Linear lane mark identification and track method based on entropy maximization edge extraction[J]. Journal of Jilin University (Engineering and Technology Edition), 2005, 35(4): 420-425. | |
| 9 | Jung C R, Kelber C R. An improved linear-parabolic model for lane following and curve detection[C]∥XVIII Brazilian Symposium on Computer Graphics and Image Processing, Natal, Brazil, 2005: 131-138. |
| 10 | 吴骅跃, 段里仁. 基于RGB熵和改进区域生长的非结构化道路识别方法[J]. 吉林大学学报: 工学版, 2019, 49(3): 727-735. |
| Wu Hua-yue, Duan Li-ren. Unstructured road detection method based on RGB entropy and improved region growing[J]. Journal of Jilin University (Engineering and Technology Edition), 2019, 49(3): 727-735. | |
| 11 | Huval B, Wang T, Tandon S, et al. An empirical evaluation of deep learning on highway driving[J/OL]. [2015-04-17]. |
| 12 | Gurghian A, Koduri T, Bailur S V, et al. Deeplanes: end-to-end lane position estimation using deep neural networks[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Las Vegas, USA, 2016: 38-45. |
| 13 | He B, Ai R, Yan Y, et al. Accurate and robust lane detection based on dual-view convolutional neutral network[C]∥IEEE Intelligent Vehicles Symposium, Gothenburg, Sweden, 2016: 1041-1046. |
| 14 | Pan X, Shi J, Luo P, et al. Spatial as deep: spatial cnn for traffic scene understanding[J/OL]. [2017-12-17]. |
| 15 | Philion J. FastDraw: Addressing the long tail of lane detection by adapting a sequential prediction network[C]∥Conference on Computer Vision and Pattern Recognition, Long Beach, USA, 2019: 11574-11583. |
| 16 | Khan H U, Ali A R, Hassan A, et al. Lane detection using lane boundary marker network with road geometry constraints[C]∥IEEE Winter Conference on Applications of Computer Vision, Snowmass Village, USA, 2020: 1823-1832. |
| 17 | Qin Z, Wang H, Li X. Ultra fast structure-aware deep lane detection[J/OL]. [2020-08-05]. |
| 18 | He K, Zhang X, Ren S, et al. Deep residual learning for image recognition[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, USA, 2016: 770-778. |
| 19 | Dettmers T, Zettlemoyer L. Sparse networks from scratch: faster training without losing performance[J/OL]. [2019-08-23]. |
| 20 | Kingma D P, Ba J. Adam: a method for stochastic optimization[J/OL]. [2017-01-30]. |
| [1] | 白天,徐明蔚,刘思铭,张佶安,王喆. 基于深度神经网络的诉辩文本争议焦点识别[J]. 吉林大学学报(工学版), 2022, 52(8): 1872-1880. |
| [2] | 曲福恒,丁天雨,陆洋,杨勇,胡雅婷. 基于邻域相似性的图像码字快速搜索算法[J]. 吉林大学学报(工学版), 2022, 52(8): 1865-1871. |
| [3] | 秦贵和,黄俊锋,孙铭会. 基于双手键盘的虚拟现实文本输入[J]. 吉林大学学报(工学版), 2022, 52(8): 1881-1888. |
| [4] | 杨怀江,王二帅,隋永新,闫丰,周跃. 简化型残差结构和快速深度残差网络[J]. 吉林大学学报(工学版), 2022, 52(6): 1413-1421. |
| [5] | 方世敏. 基于频繁模式树的多来源数据选择性集成算法[J]. 吉林大学学报(工学版), 2022, 52(4): 885-890. |
| [6] | 刘铭,杨雨航,邹松霖,肖志成,张永刚. 增强边缘检测图像算法在多书识别中的应用[J]. 吉林大学学报(工学版), 2022, 52(4): 891-896. |
| [7] | 董绍江,朱朋,裴雪武,李洋,胡小林. 基于子领域自适应的变工况下滚动轴承故障诊断[J]. 吉林大学学报(工学版), 2022, 52(2): 288-295. |
| [8] | 车翔玖,陈赫元. 基于改进YOLOv4的多目标光盘检测算法[J]. 吉林大学学报(工学版), 2022, 52(11): 2662-2668. |
| [9] | 王生生,李晨旭,王翔宇,姚志林,刘一申,吴佳倩,杨晴然. 基于改进残差胶囊网络和麻雀搜索的脑瘤图像分类[J]. 吉林大学学报(工学版), 2022, 52(11): 2653-2661. |
| [10] | 曹洁,何智栋,余萍,王进花. 数据不平衡分布下轴承故障诊断方法[J]. 吉林大学学报(工学版), 2022, 52(11): 2523-2531. |
| [11] | 王生生,陈境宇,卢奕南. 基于联邦学习和区块链的新冠肺炎胸部CT图像分割[J]. 吉林大学学报(工学版), 2021, 51(6): 2164-2173. |
| [12] | 赵宏伟,张子健,李蛟,张媛,胡黄水,臧雪柏. 基于查询树的双向分段防碰撞算法[J]. 吉林大学学报(工学版), 2021, 51(5): 1830-1837. |
| [13] | 曹洁,屈雪,李晓旭. 基于滑动特征向量的小样本图像分类方法[J]. 吉林大学学报(工学版), 2021, 51(5): 1785-1791. |
| [14] | 陈雪云,许韬,黄小巧. 基于条件生成对抗网络的医学细胞图像生成检测方法[J]. 吉林大学学报(工学版), 2021, 51(4): 1414-1419. |
| [15] | 王春波,底晓强. 基于标签分类的云数据完整性验证审计方案[J]. 吉林大学学报(工学版), 2021, 51(4): 1364-1369. |
|