吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (3): 823-831.doi: 10.13229/j.cnki.jdxbgxb20221264
• 通信与控制工程 • 上一篇
复杂风场环境下的多旋翼无人机编队故障检测方法
王小艺( ),刘迪一,于家斌,何卓昀,赵峙尧()
),刘迪一,于家斌,何卓昀,赵峙尧()
- 北京工商大学 人工智能学院,北京 100048
Fault detection method of multirotor unmanned aerial vehicle formation in complex wind field environment
Xiao-yi WANG(),Di-yi LIU,Jia-bin YU,Zhuo-yun HE,Zhi-yao ZHAO()
- School of Artificial Intelligence,Beijing Technology and Business University,Beijing 100048,China
摘要:
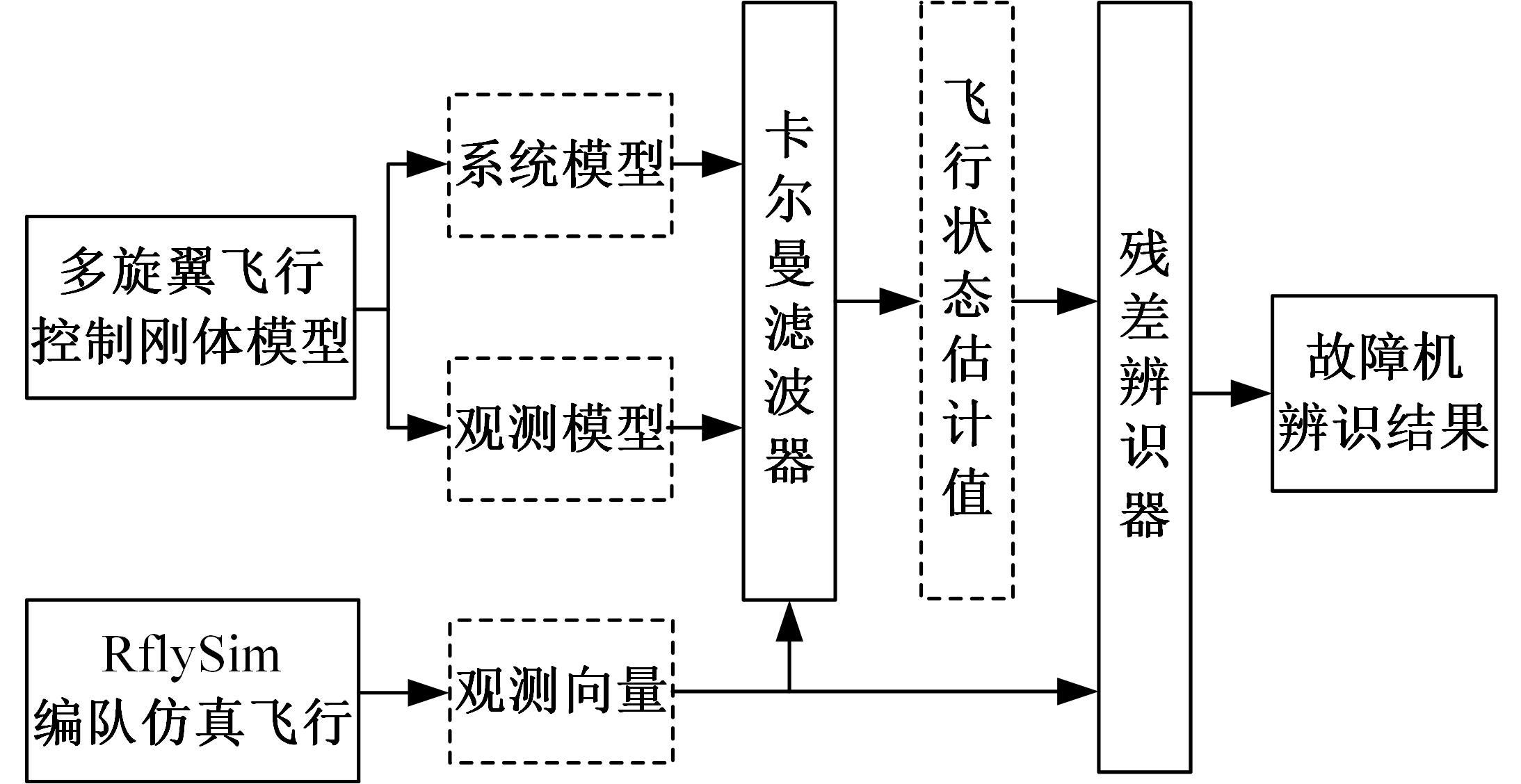
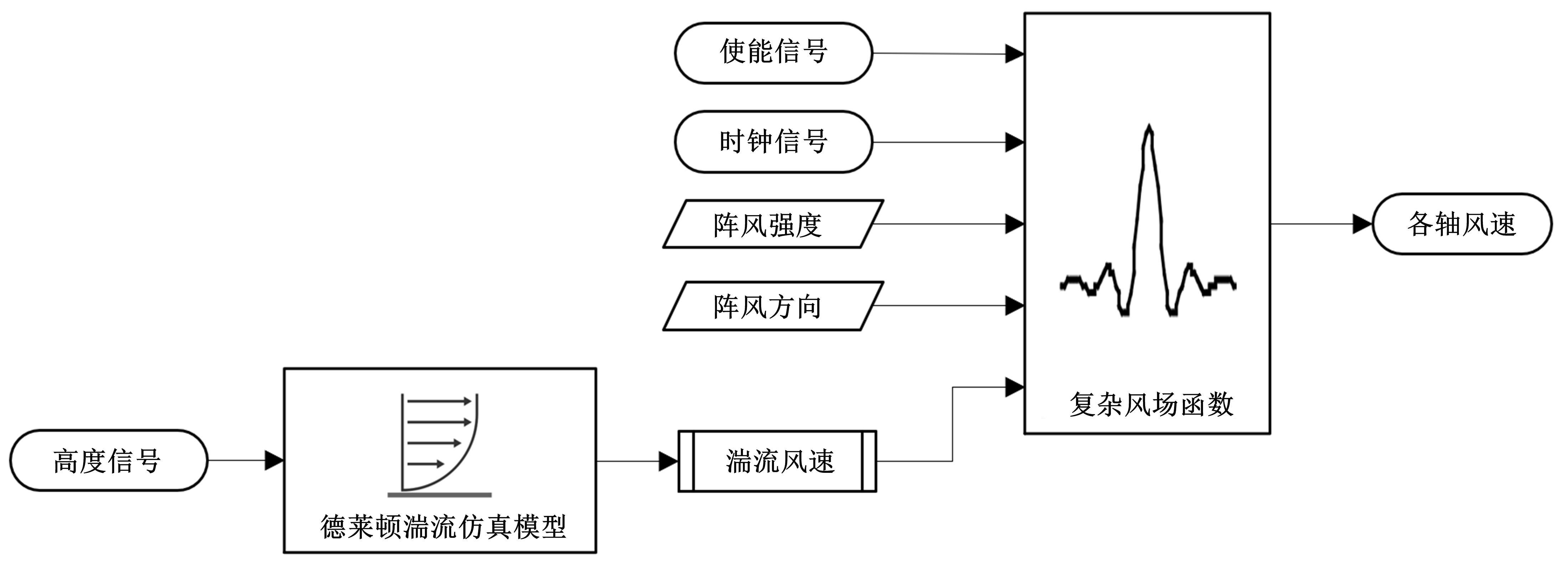
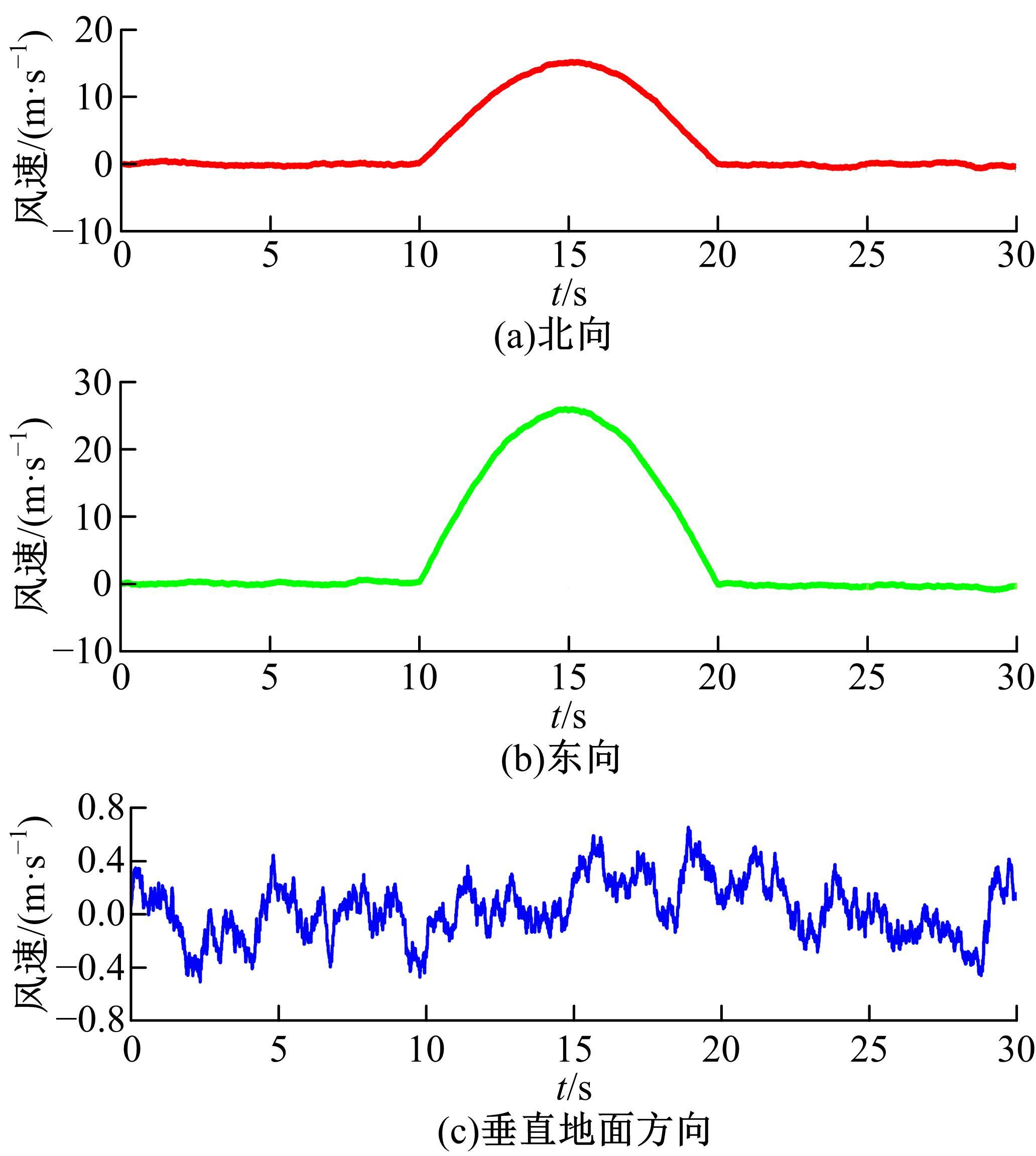
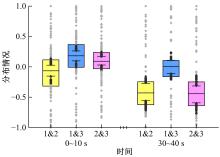
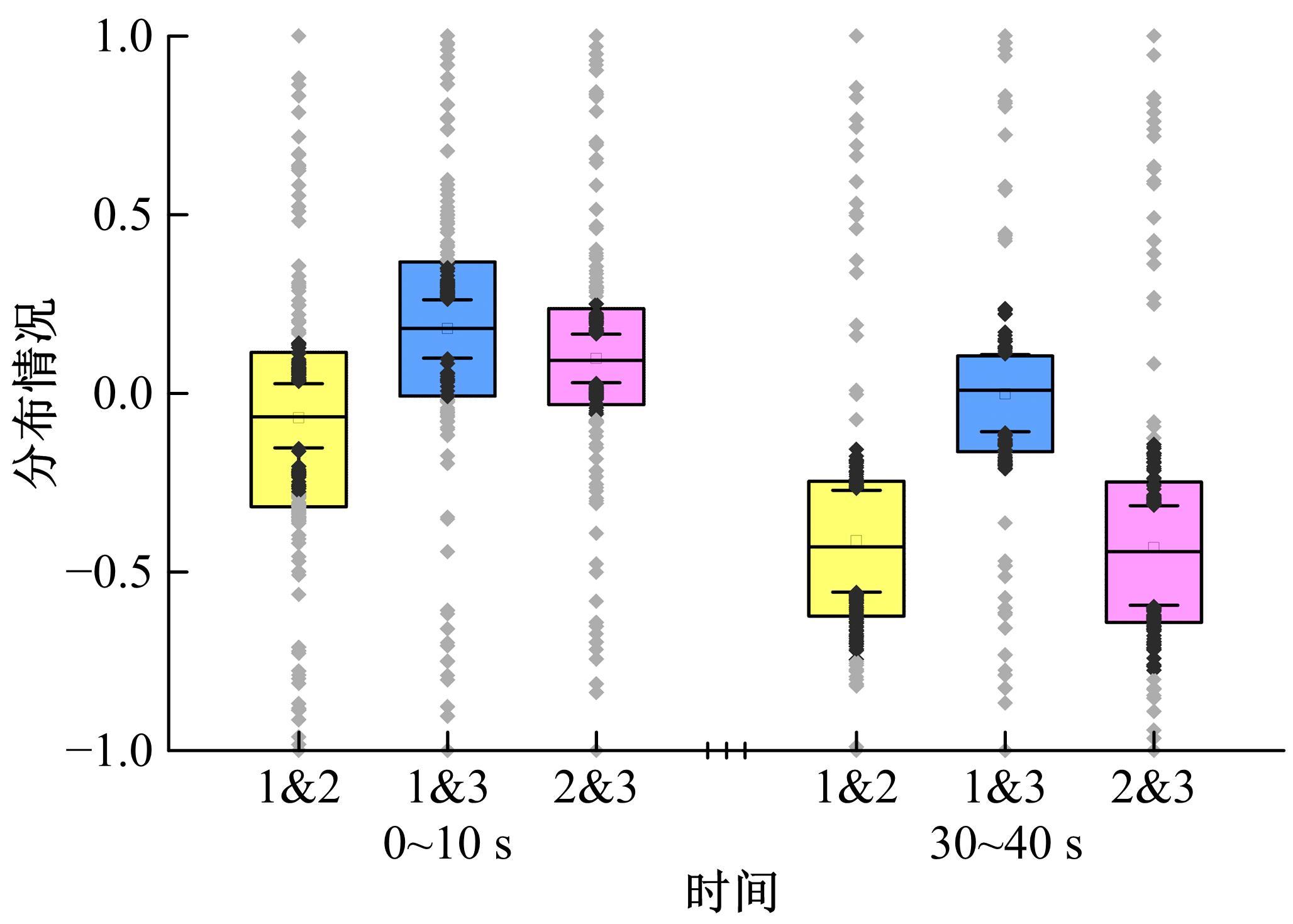
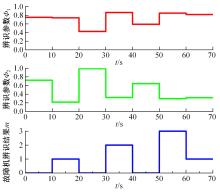
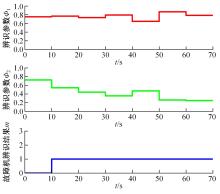
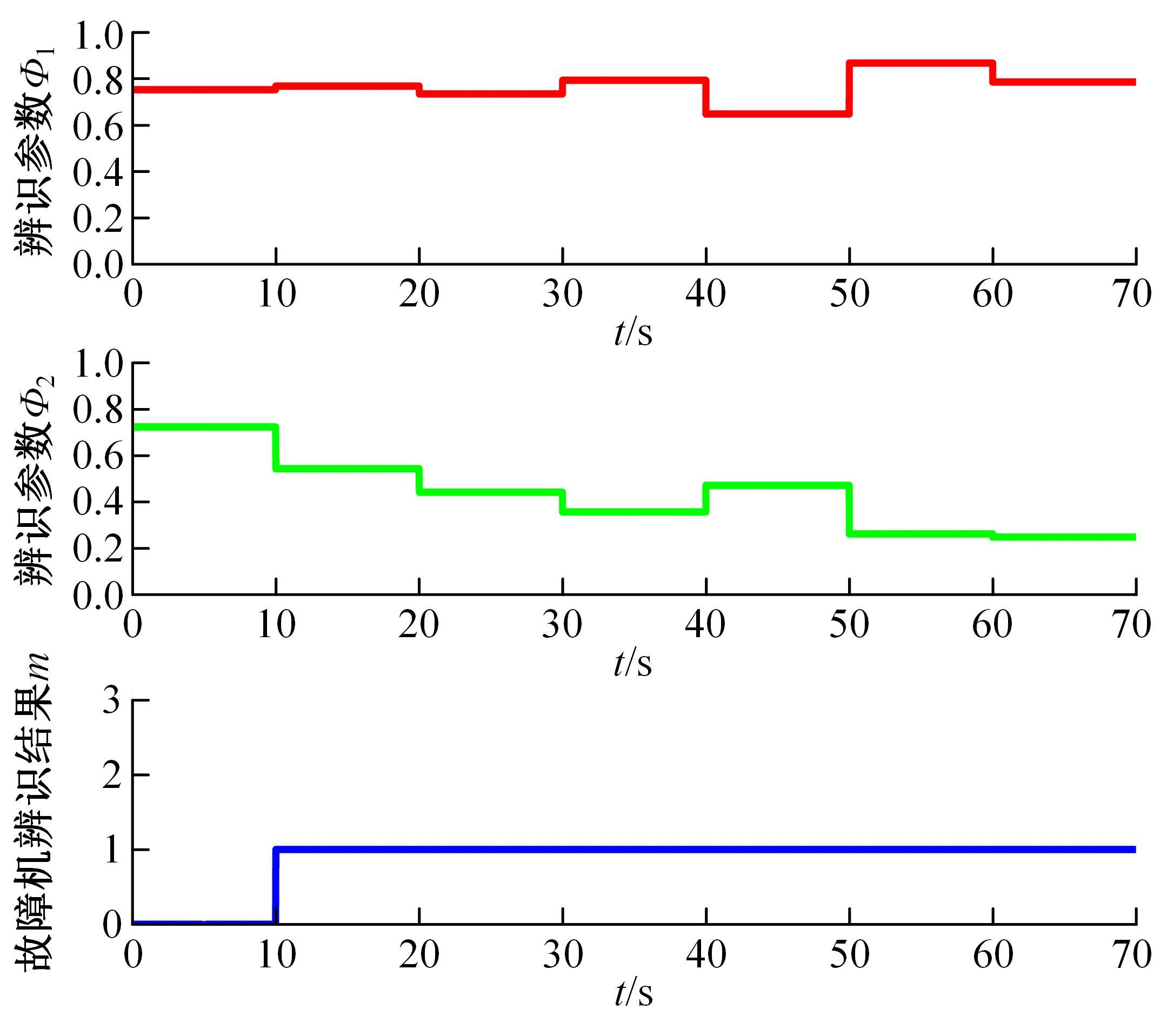
针对多旋翼无人机编队故障检测研究的不足,提出了一种在复杂风场飞行环境下多旋翼无人机编队的故障检测方法。结合多旋翼动态行为和风扰动建模,基于卡尔曼滤波算法对编队中各多旋翼的状态变量进行实时估计,并通过概率统计的方法提取故障特征,进而建立辨识器模型进行故障检测,最终得到编队中的故障机辨识结果。在仿真验证环节,搭建了基于RflySim飞行仿真平台的湍流风与有色阵风叠加的复杂风场模型,分别对多旋翼的螺旋桨、加速度计、GPS、电池进行故障注入和编队飞行模拟,通过多组仿真验证了本文方法的有效性。
中图分类号:
- V240.2







| 1 | 柴天佑. 自动化科学与技术发展方向[J]. 自动化学报, 2018, 44(11): 1923-1930. |
| Chai Tian-you. The direction of automation science and technology development[J]. Journal of Automation, 2018, 44(11): 1923-1930. | |
| 2 | Chen F, Jiang R, Zhang K, et al. Robust backstepping sliding-mode control and observer-based fault estimation for a quadrotor UAV[J]. IEEE Transactions on Industrial Electronics, 2016, 63(8): 5044-5056. |
| 3 | Lyu P, Liu S C, Lai J Z, et al. An analytical fault diagnosis method for yaw estimation of quadrotors[J]. Control Engineering Practice, 2019, 86: 118-128. |
| 4 | 印磊. 基于观测器的无人机编队分布式故障诊断与调节研究[D]. 南京: 南京航空航天大学自动化学院, 2020. |
| Yin Lei. Observer-based distributed fault diagnosis and regulation of UAV formations[D]. Nanjing: School of Automation, Nanjing University of Aeronautics and Astronautics, 2020. | |
| 5 | 聂瑞, 王红茹. 基于神经网络观测器的无人机编队执行器故障诊断[J]. 空天防御, 2022, 5(2): 32-41. |
| Nie Rui, Wang Hong-ru. Fault diagnosis of UAV formation actuators based on neural network observer[J]. Air and Space Defense, 2022, 5(2): 32-41. | |
| 6 | Zhao Z Y, Yao P, Wang X Y, et al. Reliable flight performance assessment of multirotor based on interacting multiple model particle filter and health degree[J]. Chinese Journal of Aeronautics, 2019, 32(2): 444-453. |
| 7 | Zhang H P, Zhao Z Y, Quan Q. Fault detection and diagnosis of the homogenous quadcopter team in the presence of wind disturbance[J]. IFAC-PapersOnLine, 2018, 51(24): 74-81. |
| 8 | 全权. 多旋翼飞行器设计与控制[M]. 北京: 电子工业出版社, 2018. |
| 9 | 全权, 戴训华, 王帅. 多旋翼飞行器设计与控制实践[M]. 北京: 电子工业出版社, 2020. |
| 10 | McRuer D T, Graham D, Ashkenas I. Aircraft dynamics and automatic control[M]. Princeton University Press, 2014. |
| 11 | Cui W, Shi X, Wang Y. Modeling and simulating of atmospheric turbulence in flight simulator[M]//Theory, Methodology, Tools and Applications for Modeling and Simulation of Complex Systems. Singapore, Springer, 2016: 468-476. |
| 12 | He Y, Chen Y, Zhou M. Modeling and control of a quadrotor helicopter under impact of wind disturbance[J]. Journal of Chinese Inertial Technology, 2013, 21(5): 624-630. |
| 13 | 戴礼灿, 刘欣, 张海瀛, 等. 基于卡尔曼滤波算法展开的飞行目标轨迹预测[J/OL]. [2022-09-16]. |
| Dai Li-can, Liu Xin, Zhang Hai-ying, et al. Flight target trajectory prediction based on Kalman filter algorithm unfolding[J/OL]. [2022-09-16]. | |
| 14 | Kalman R E. A new approach to linear filtering and prediction problems[J]. Journal of Basic Engineering, 1960, 82(1): 35. |
| 15 | Braun M, Golubitsky M. Differential Equations and Their Applications[M]. New York: Springer-Verlag, 1983. |
| 16 | 林洪桦. 现代测量误差分析及数据处理(二)[J]. 计量技术, 1997(2): 39-44. |
| Lin Hong-hua. Modern measurement error analysis and data processing (II) [J]. Measurement Technology, 1997(2): 39-44. | |
| 17 | Dai X H, Ke C X, Quan Q, et al. RFlySim: Automatic test platform for UAV autopilot systems with FPGA-based hardware-in-the-loop simulations[J]. Aerospace Science and Technology, 2021, 114: No.106727. |
| 18 | Dai X H, Ke C X, Quan Q, et al. Simulation credibility assessment methodology with FPGA-based hardware-in-the-loop platform[J]. IEEE Transactions on Industrial Electronics, 2020, 68(4): 3282-3291. |
| [1] | 马永杰,陈敏. 基于卡尔曼滤波预测策略的动态多目标优化算法[J]. 吉林大学学报(工学版), 2022, 52(6): 1442-1458. |
| [2] | 李文航,倪涛,赵丁选,张泮虹,师小波. 基于集合卡尔曼滤波的高机动救援车辆主动悬挂控制方法[J]. 吉林大学学报(工学版), 2022, 52(12): 2816-2826. |
| [3] | 谢少彪,张宇,温凯瑞,张硕,刘宗明,齐乃明. 非合作目标强跟踪容积卡尔曼滤波运动状态估计[J]. 吉林大学学报(工学版), 2021, 51(4): 1482-1489. |
| [4] | 李静,石求军,洪良,刘鹏. 基于车辆状态估计的商用车ESC神经网络滑模控制[J]. 吉林大学学报(工学版), 2020, 50(5): 1545-1555. |
| [5] | 李静,石求军,刘鹏,户亚威. 基于纵向车速估算的商用车ABS神经网络滑模控制[J]. 吉林大学学报(工学版), 2019, 49(4): 1017-1025. |
| [6] | 王德军,吕志超,王启明,张建瑞,丁建楠. 基于EKF及调制傅式级数的缸压辨识[J]. 吉林大学学报(工学版), 2019, 49(4): 1174-1185. |
| [7] | 田彦涛, 张宇, 王晓玉, 陈华. 基于平方根无迹卡尔曼滤波算法的电动汽车质心侧偏角估计[J]. 吉林大学学报(工学版), 2018, 48(3): 845-852. |
| [8] | 朱枫, 张葆, 李贤涛, 王正玺, 张士涛. 基于强跟踪卡尔曼滤波的陀螺信号处理[J]. 吉林大学学报(工学版), 2017, 47(6): 1868-1875. |
| [9] | 李静, 张家旭, 张艳华, 陈立军. 采用强跟踪中心差分滤波器的汽车状态和参数估计[J]. 吉林大学学报(工学版), 2017, 47(5): 1329-1335. |
| [10] | 邓丽飞, 石要武, 朱兰香, 于丁力. SI发动机闭环系统故障检测[J]. 吉林大学学报(工学版), 2017, 47(2): 577-582. |
| [11] | 林楠, 施树明, 马力, 隗海林. 含坡度变化率信息的道路坡度估计[J]. 吉林大学学报(工学版), 2016, 46(6): 1845-1850. |
| [12] | 莫元富, 于德新, 郭亚娟. 基于灰色关联的车联网信道负载预测算法[J]. 吉林大学学报(工学版), 2016, 46(5): 1453-1457. |
| [13] | 许杰, 戚大伟. 基于改进加权质心和UKF的移动目标定位算法[J]. 吉林大学学报(工学版), 2016, 46(4): 1354-1359. |
| [14] | 曾小华, 蒋渊德, 宋大凤, 彭宇君, 杨南南. 诊断算法在混合动力汽车能量管理策略中的集成开发[J]. 吉林大学学报(工学版), 2016, 46(4): 1030-1037. |
| [15] | 宋传学, 肖峰, 刘思含, 李少坤, 段亮, 彭思仑. 基于无迹卡尔曼滤波的轮毂电机驱动车辆状态观测[J]. 吉林大学学报(工学版), 2016, 46(2): 333-339. |
|
||