吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (12): 3699-3710.doi: 10.13229/j.cnki.jdxbgxb.20230176
考虑模型-环境不确定性的仿生飞行器轨迹跟踪控制
侯胜杰1( ),汪忠来2(),智鹏鹏3,郑皓2,徐璟2
),汪忠来2(),智鹏鹏3,郑皓2,徐璟2
- 1.军事科学院 国防科技创新研究院,北京 100071
2.电子科技大学 机械与电气工程学院,成都 611731
3.电子科技大学 长三角研究院(湖州),浙江 湖州 313001
Trajectory tracking control method of biplane air vehicle considering model⁃environment uncertainty
Sheng-jie HOU1(),Zhong-lai WANG2(),Peng-peng ZHI3,Hao ZHENG2,Jing XU2
- 1.National Innovation Institute of Defense Technology,Academy of Military Sciences,Beijing 100071,China
2.School of Mechanical and Electrical Engineering,University of Electronic Science and Technology of China,Chengdu 611731,China
3.Yangtze Delta Region Institute (Huzhou),University of Electronic Science and Technology of China,Huzhou 313001,China
摘要:
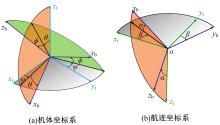
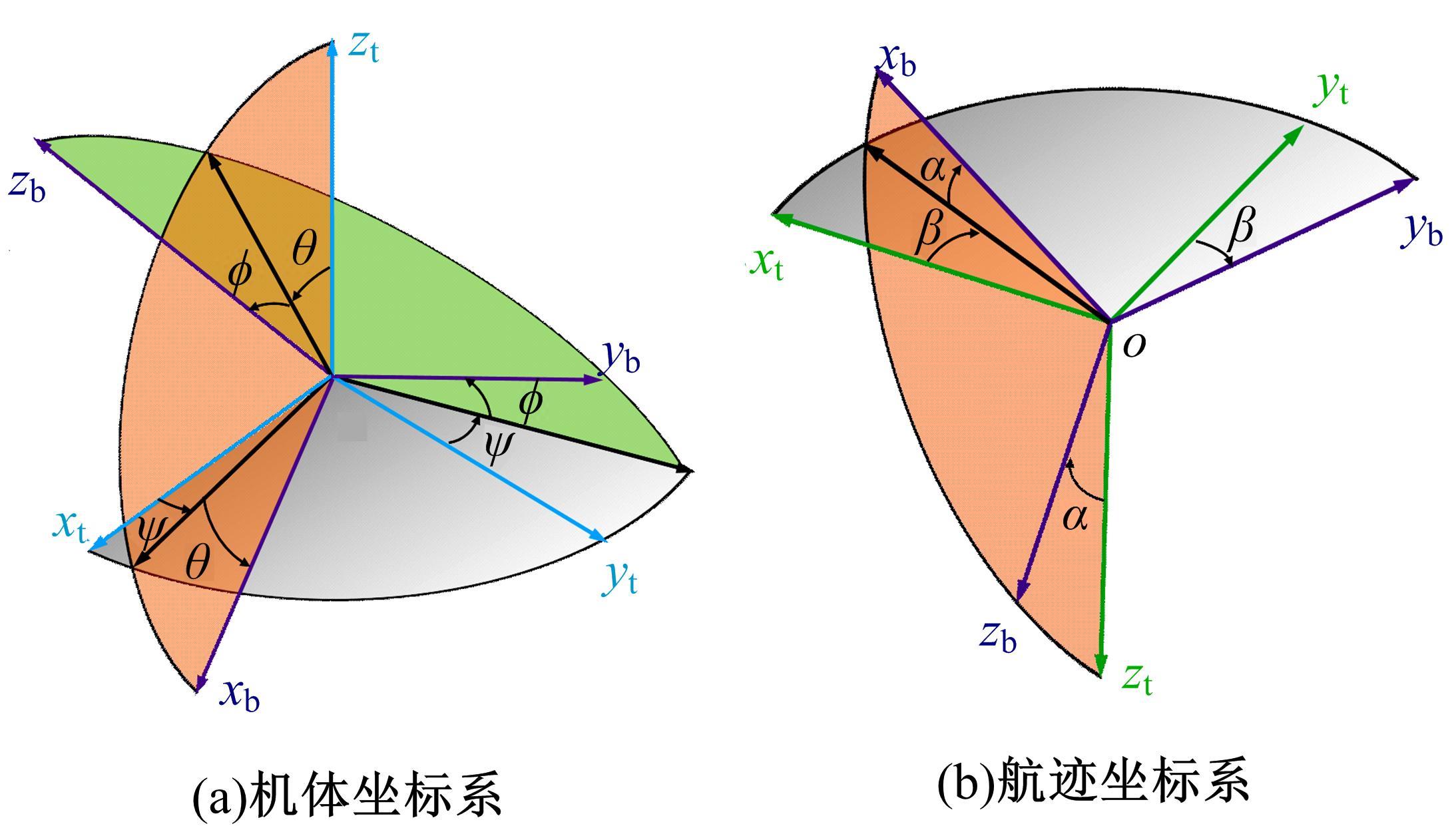
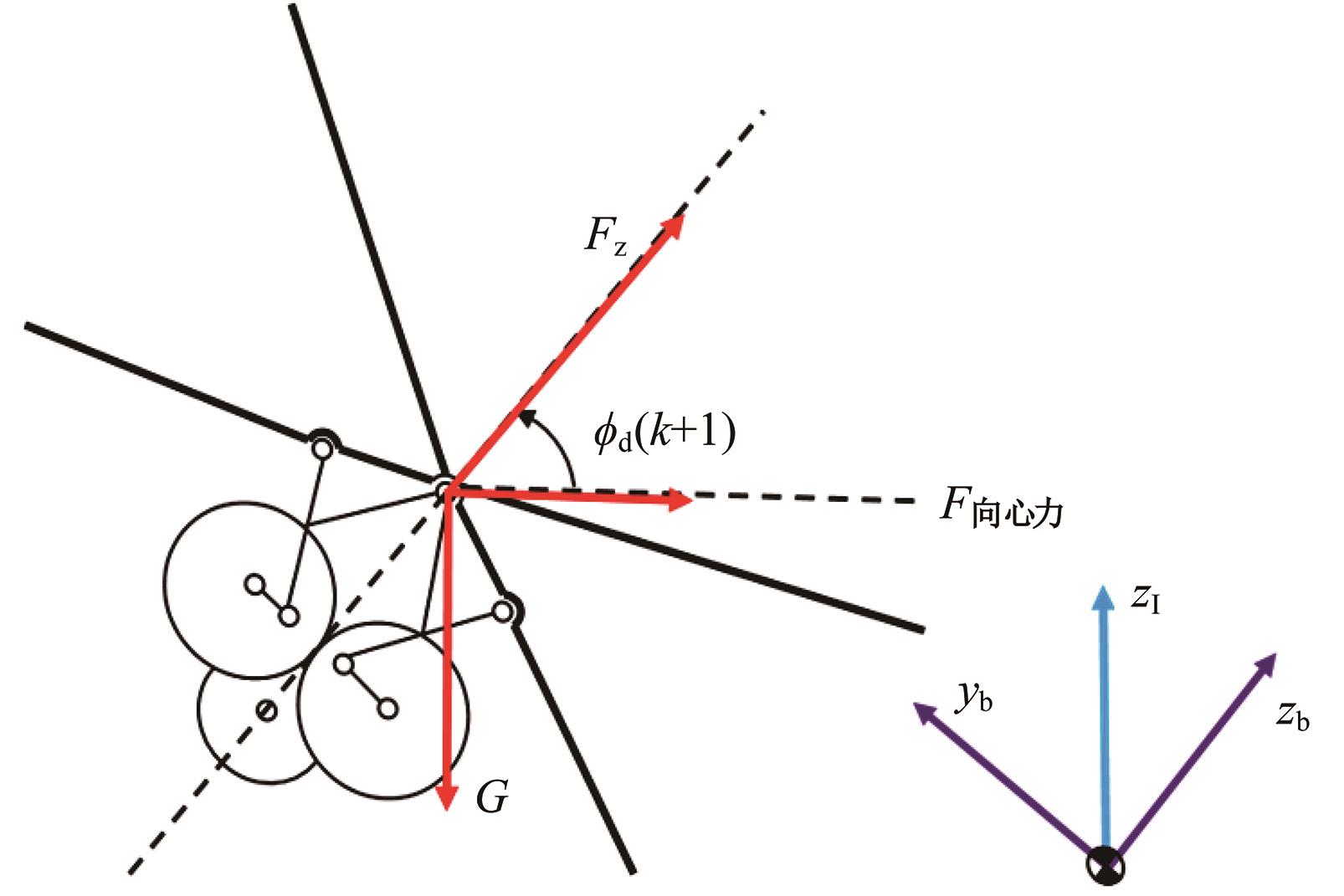
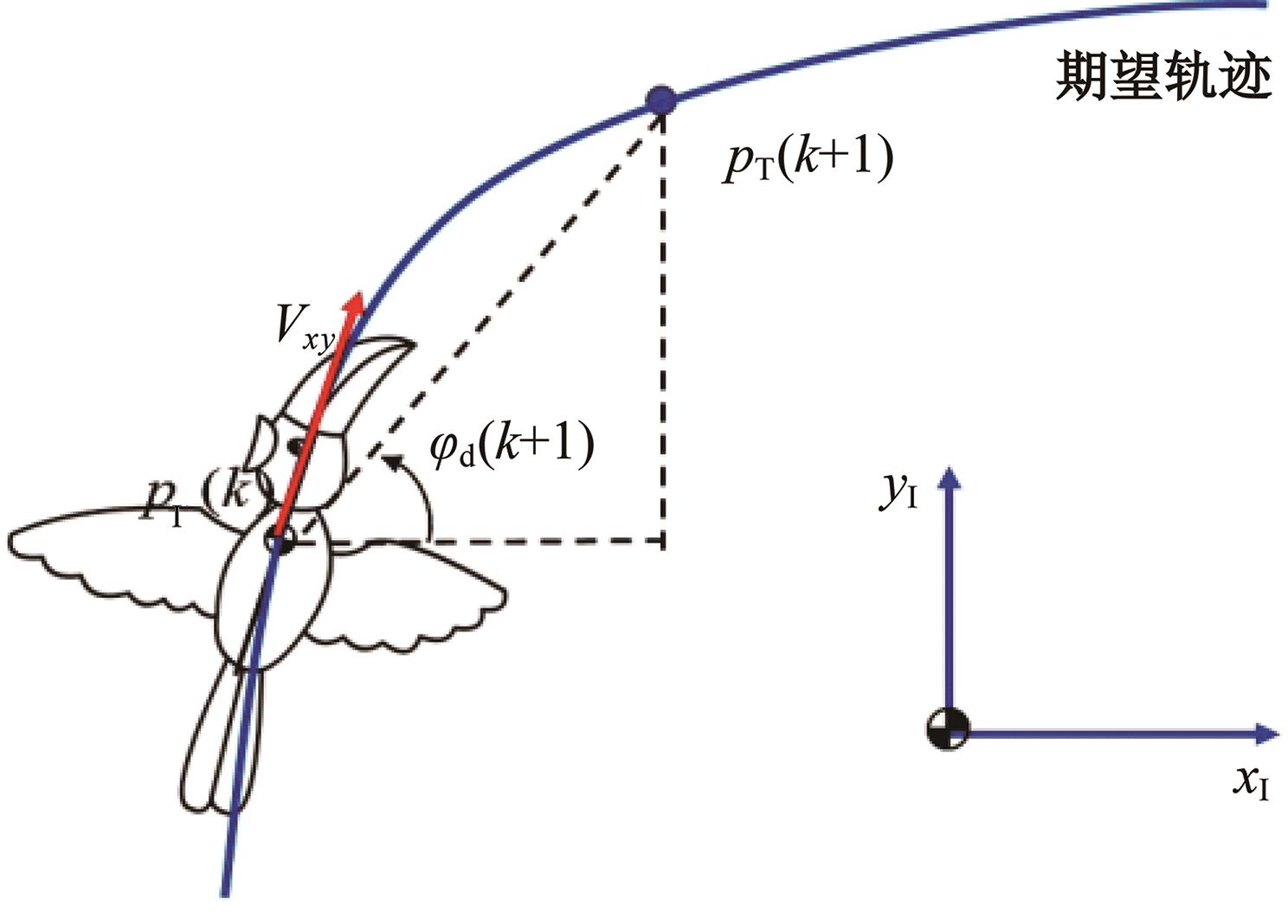
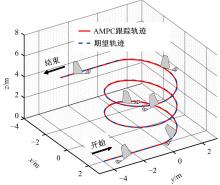
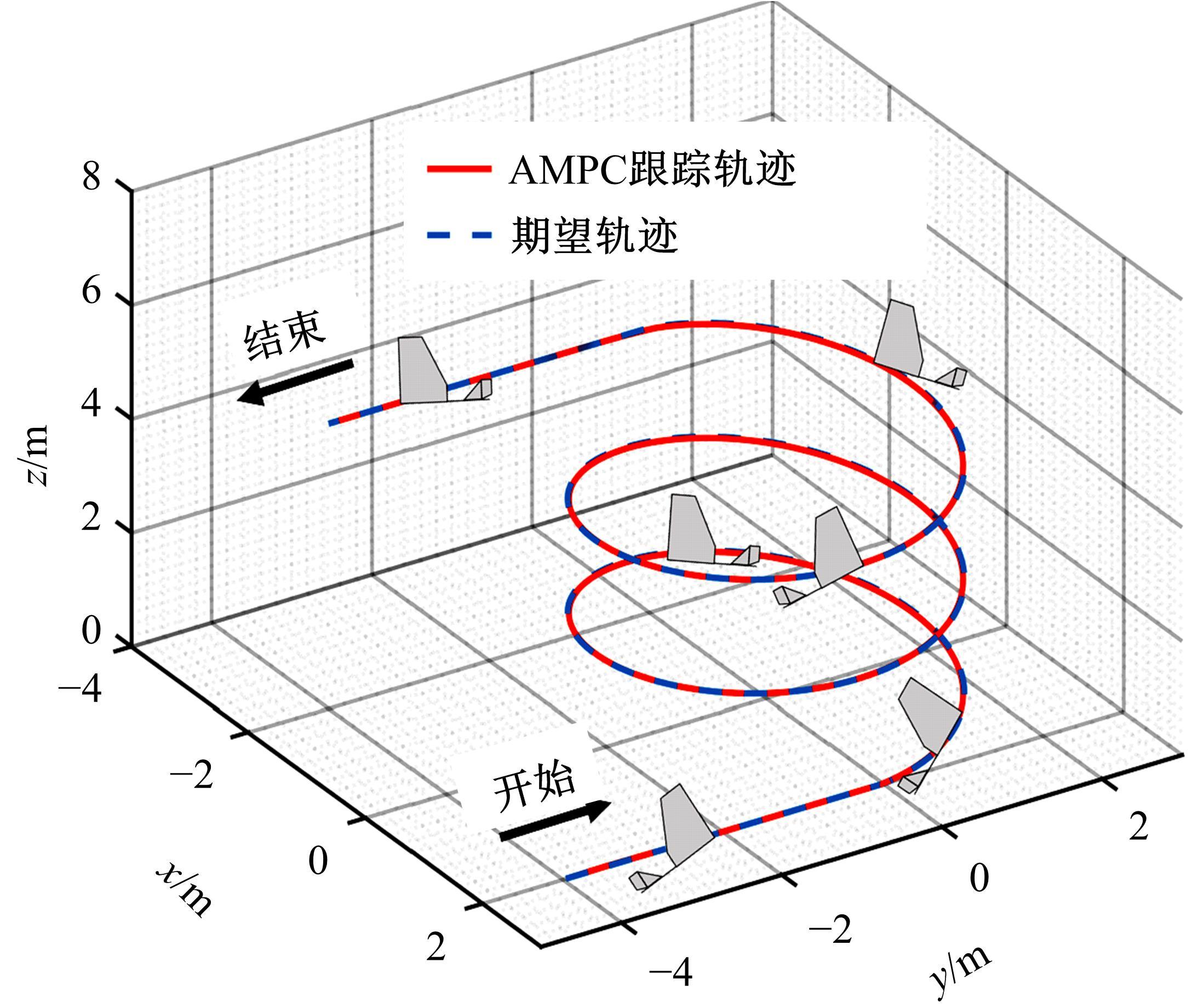
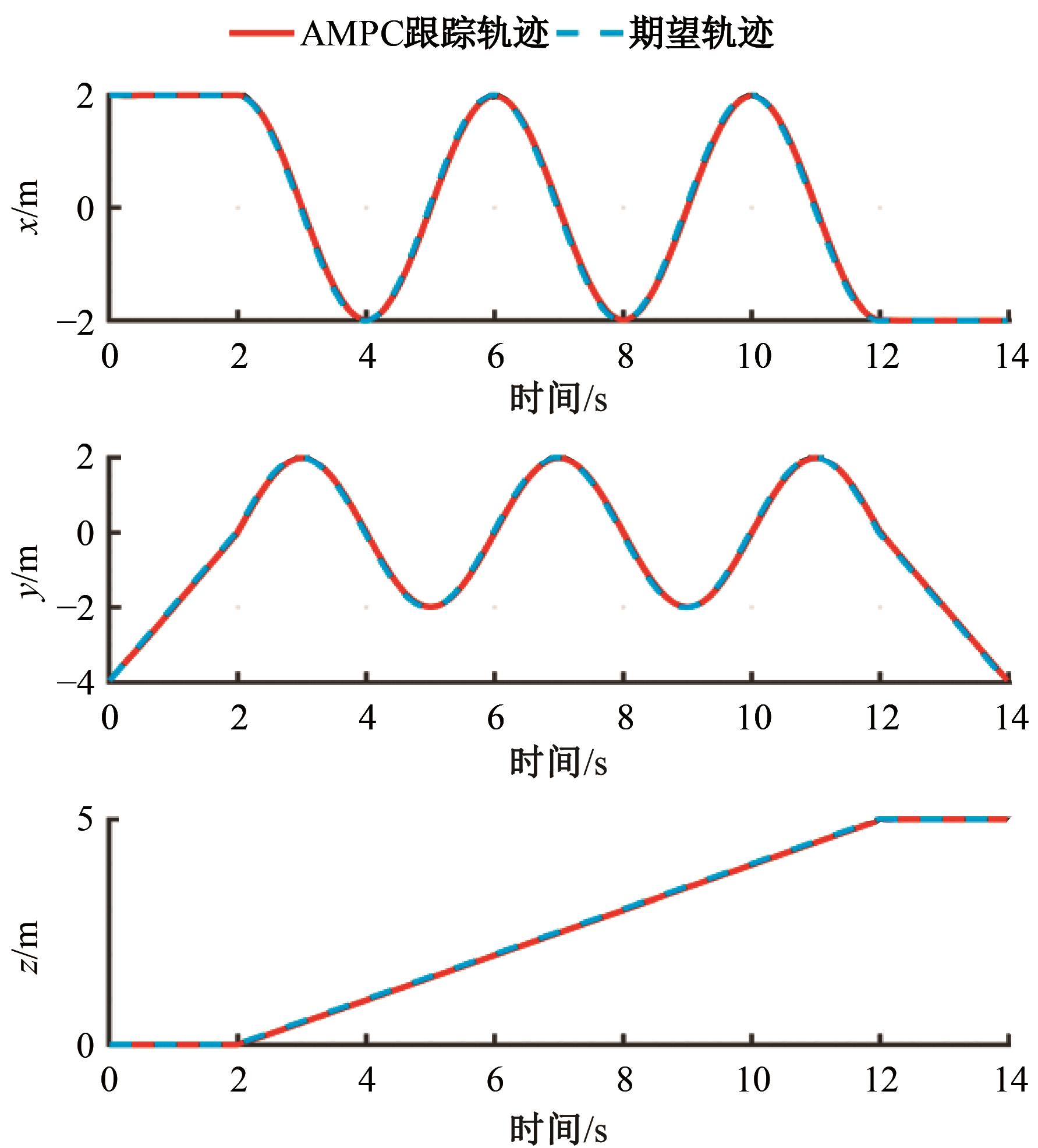
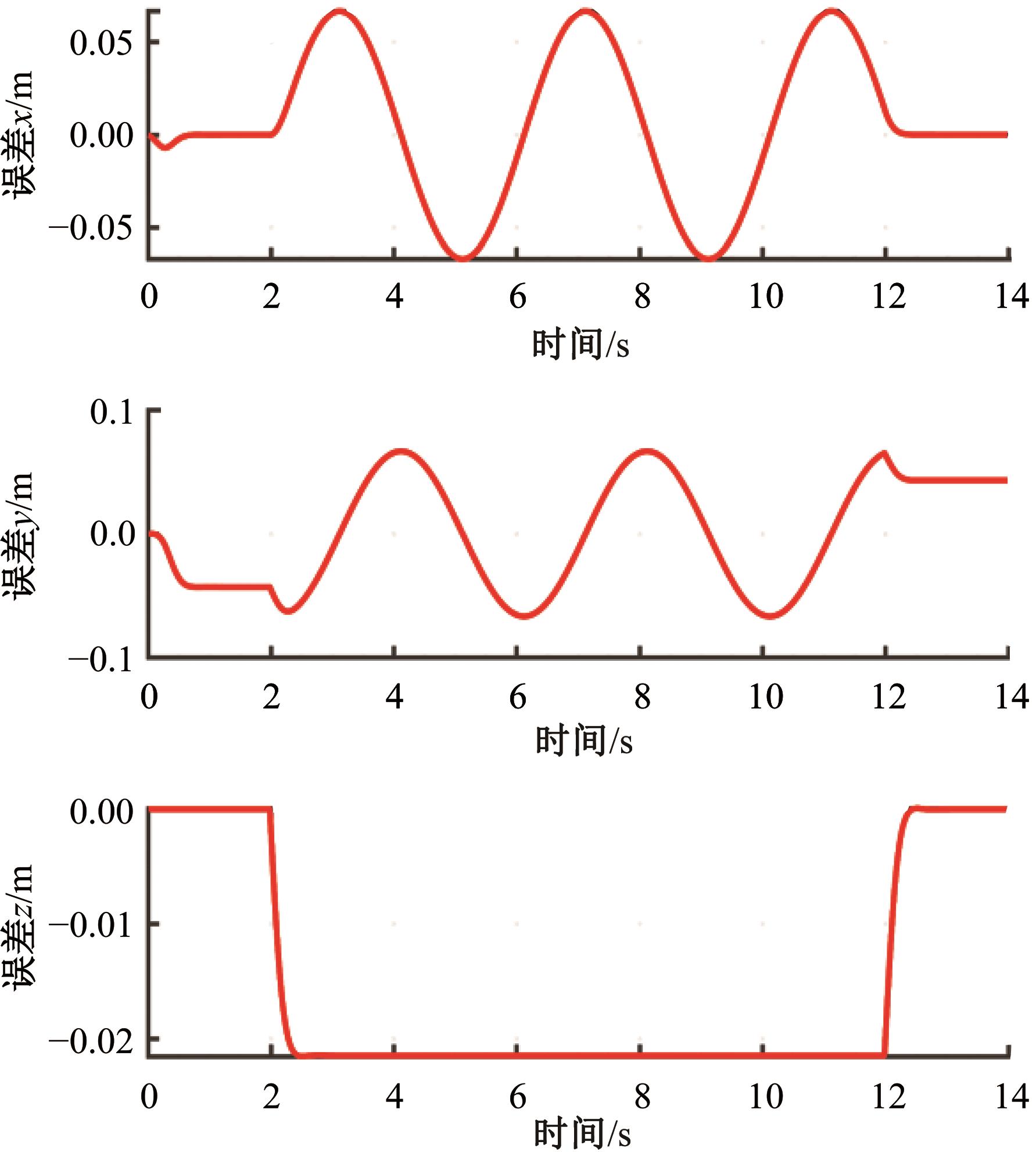
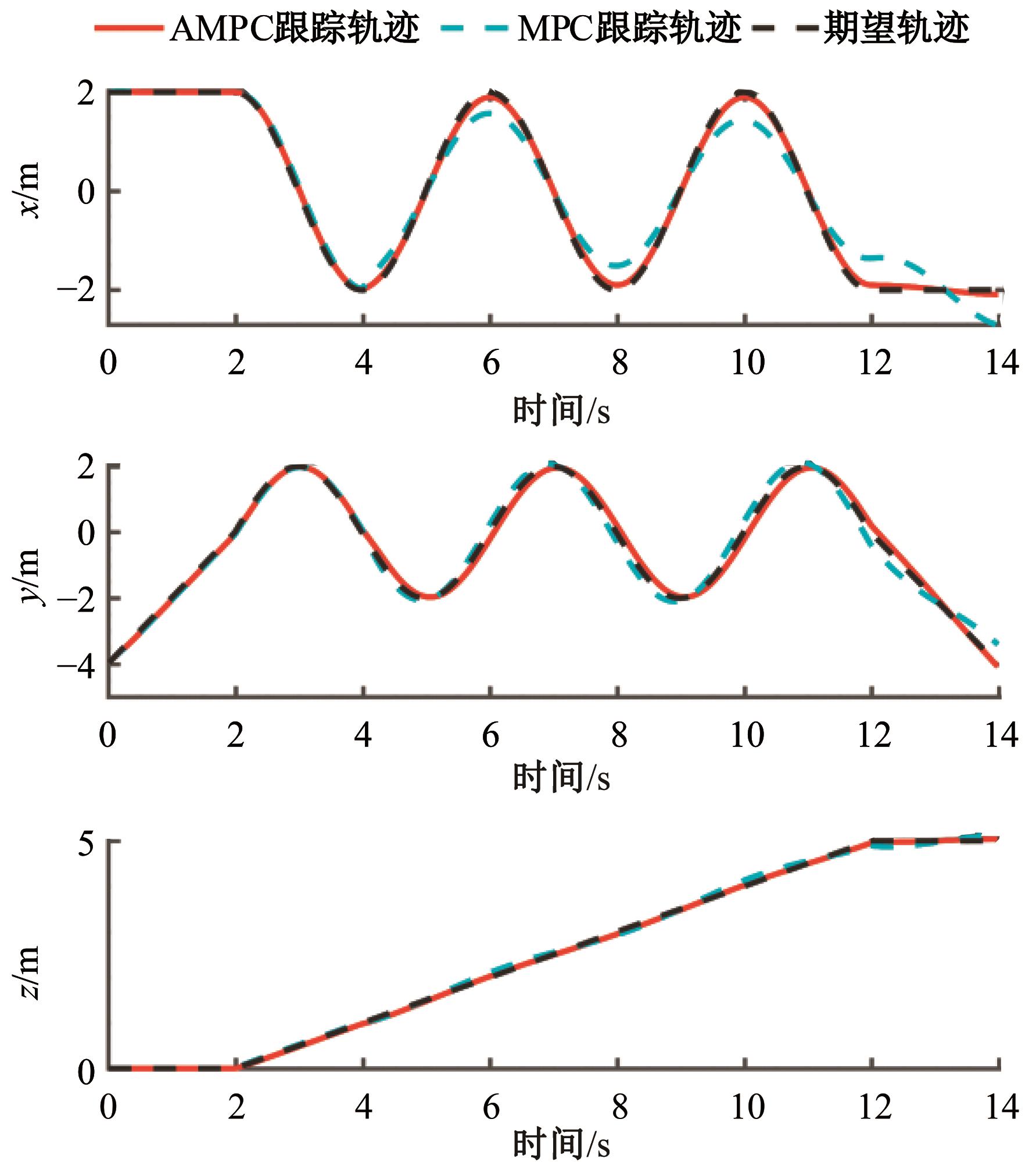
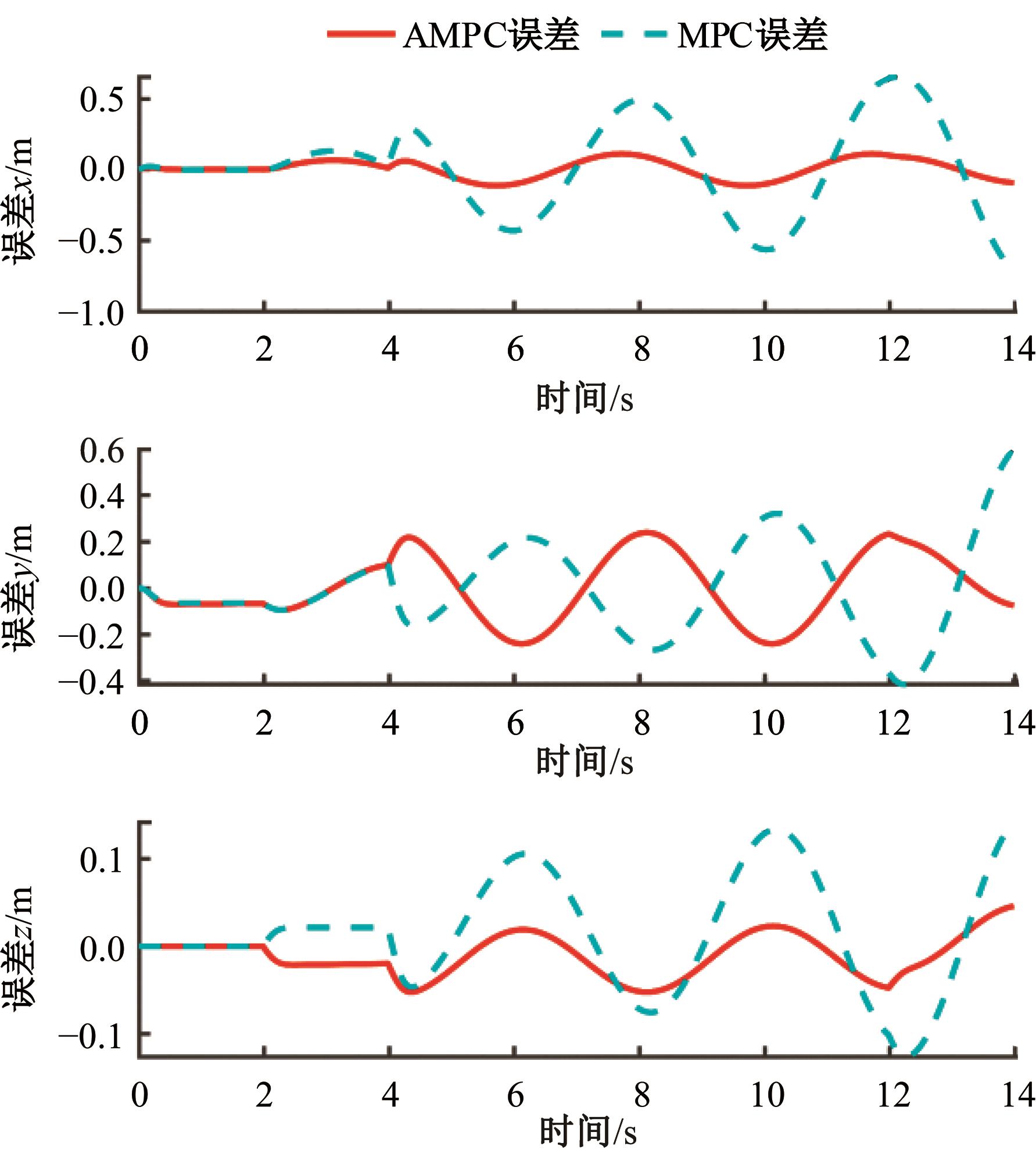
针对仿生微型复翼飞行器(BFMAV)运动过程中模型参数不确定性和阵风扰动对飞行轨迹的影响问题,提出一种基于自适应模型预测控制(MPC)的轨迹跟踪控制方法。依据BFMAV的结构特征,建立其六自由度非线性动力学模型;引入内外扰动项表征模型参数不确定性和阵风扰动,确定BFMAV的状态方程,并进行姿态制导律设计实时调整姿态角;将内外扰动项嵌入MPC模型中,建立考虑模型-环境不确定性的BFMAV轨迹预测模型,通过设计补偿观测器和扰动观测器实现MPC模型的自适应控制和快速求解;采用不同控制方法对自由飞行和存在内外扰动两种情况下的轨迹跟踪状态进行仿真,验证本文方法的有效性。结果表明:相比传统MPC方法,本文方法追踪性能稳定、追踪误差较小;在模型不确定性和外部扰动共存的情况下,可以精确完成BFMAV的轨迹跟踪任务。
中图分类号:
- V249.12






| 1 | Avionics M D. A flapping of wings[J]. Science, 2012, 335(6075): 1430-1433. |
| 2 | 郑皓, 余立均, 智鹏鹏, 等. 仿生扑翼微型飞行器动态避障策略[J]. 吉林大学学报:工学版, 2023, 53(9): 2732-2740. |
| Zheng Hao, Yu Li-jun, Zhi Peng-peng, et al. Dynamic obstacle avoidance strategy for flapping⁃wing micro air vehicles[J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(9): 2732-2740. | |
| 3 | 李丹. 仿生扑翼飞行器:空气动力、扑动与智能控制的完美结合[J]. 航空制造技术, 2018, 61(8): 22-24. |
| Li Dan. Flapping flight vehicle: ideal combination of aerodynamic, flapping and intelligent control[J]. Aeronautical Manufacturing Technology, 2018, 61(8): 22-24. | |
| 4 | James E B, Chang K K, Yuri S. Control of a flapping-wing micro air vehicle: sliding-mode approach[J]. Journal of Guidance, Control, and Dynamics, 2018, 41(5): 1223-1226. |
| 5 | 肖天航, 罗东明, 郑祥明, 等. 仿生飞行器非定常气动优化设计研究进展与挑战[J]. 空气动力学学报, 2018, 36(1): 80-87. |
| Xiao Tian-hang, Luo Dong-ming, Zheng Xiang-ming, et al. Research progress and challenges of unsteady aerodynamic optimization design of bionic aircraft[J]. Journal of Aerodynamics, 2018, 36(1): 80-87. | |
| 6 | 范继祥, 周狄. 基于剪式陀螺系统的空间飞行器非线性姿态控制[J]. 机械工程学报, 2010, 46(8): 151-158. |
| Fan Ji-xiang, Zhou Di. Nonlinear attitude control of spacecraft based on scissor pairs of control moment gyroscope[J]. Chinese Journal of Mechanical Engineering, 2010, 46(8): 151-158. | |
| 7 | 李光明. 大翼展仿生飞鸟机器人机构设计与远程操作控制方法[D]. 哈尔滨: 哈尔滨工业大学机电工程与自动化学院, 2017. |
| Li Guang-ming. Mechanism design and remote operation control method of bionic bird robot with large wing[D]. Harbin:College of Mechanical and Electrical Engineering and Automation, Harbin Institute of Technology, 2017. | |
| 8 | 吴涵. 扑翼飞行器半自主导航系统的设计与实现[D]. 北京: 北京交通大学机械与电子控制工程学院, 2019. |
| Wu Han. Design and implementation of semi-autonomous navigation system for flapping wing aircraft[D]. Beijing: School of Mechanical,Electronic and Control Engineering, Beijing Jiaotong University, 2019. | |
| 9 | 刘晶, 汪超, 谢鹏, 等. 基于PD控制的仿昆虫扑翼样机研制[J]. 航空学报, 2020, 41(9):106-117. |
| Liu Jing, Wang Chao, Xie Peng, et al. Development of insect-like flapping wing micro air vehicle based on PD control[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(9): 106-117. | |
| 10 | 张西金, 方宗德, 杨小辉, 等. 微扑翼飞行器驱动装置设计与翅翼轨迹控制仿真研究[J]. 系统仿真学报, 2011, 23(4): 735-739. |
| Zhang Xi-jin, Fang Zong-de, Yang Xiao-hui, et al. Driving equipment design and wing motion track control simulation for micro flapping flight[J]. Journal of System Simulation, 2011, 23(4): 735-739. | |
| 11 | Banazadeh A, Taymourtash N. Adaptive attitude and position control of an insect-like flapping wing air vehicle[J]. Nonlinear Dynamics, 2016, 85(1): 47-66. |
| 12 | 李航, 何广平, 毕富国. 一类微型扑翼飞行器的滑模自适应姿态控制[J]. 空间控制技术与应用, 2018, 44(5): 81-88. |
| Li Hang, He Guang-ping, Bi Fu-guo. Sliding-mode adaptive attitude controller design for flapping-wing micro air vehicle[J]. Aerospace Control and Application, 2018, 44(5): 81-88. | |
| 13 | 王丙元, 张帅华, 郑芳, 等. 基于自适应终端滑模的扑翼飞行器姿态控制[J]. 控制工程, 2020, 27(2): 309-315. |
| Wang Bing-yuan, Zhang Shuai-hua, Zheng Fang, et al. Attitude control of flapping-wing aircraft based on adaptive terminal sliding mode[J]. Control Engineering of China, 2020, 27(2): 309-315. | |
| 14 | Bluman J E, Kang C K, Shtessel Y B. Sliding mode control of a biomimetic flapping wing micro air vehicle in hover[C]∥AIAA Atmospheric Flight Mechanics Conference,Denver, USA, 2017: 1633. |
| 15 | Zheng H, Zhang Y, Husnain H M, et al. Swarm intelligence based model predictive control strategy for optimal state control of discrete time-varying MIMO linear systems [J]. International Journal of Control, Automation, and Systems, 2022, 20(10): 3433-3444. |
| 16 | Berberich J, Köhler J, Muller M A. Data-driven model predictive control with stability and robustness guarantees[J]. IEEE Transactions on Automatic Control, 2021 66(4): 1702-1717. |
| 17 | Karg B, Lucia S. Efficient representation and approximation of model predictive control laws via deep learning[J]. IEEE Transactions on Cybernetics, 2020, 50(9): 3866-3878. |
| 18 | Zhang L, Xie J, Koch C R. Model predictive control of jacket tubular reactors with a reversible exothermic reaction[J]. Industrial and Engineering Chemistry Research, 2020, 59(42): 18921-18936. |
| 19 | Zhang Y, Zheng H, Xu J, et al. Radial basis function model-based adaptive model predictive control for trajectory tracking of a clapping-wing micro air vehicle[J]. Aerospace, 2023, 10(3): No.253. |
| 20 | 鲜斌, 李杰奇, 古训. 基于非线性扰动观测器的无人机地面效应补偿[J]. 吉林大学学报:工学版, 2022, 52(8): 1926-1933. |
| Xian Bin, Li Jie-qi, Gu Xun. Ground effects compensation for an unmanned aerial vehicle via nonlinear disturbance observer[J]. Journal of Jilin University (Engineering and Technology Edition), 2022, 52(8): 1926-1933. |
| [1] | 田彦涛,庾文彦,季言实,谢波. 面向不同驾驶行为模型的共享控制器设计[J]. 吉林大学学报(工学版), 2024, 54(9): 2676-2686. |
| [2] | 谢宪毅,王禹涵,金立生,赵鑫,郭柏苍,廖亚萍,周彬,李克强. 基于改变控制时域时间步长的智能车轨迹跟踪控制[J]. 吉林大学学报(工学版), 2024, 54(3): 620-630. |
| [3] | 张延安,杜岳峰,孟青峰,栗晓宇,刘磊,朱忠祥. 基于改进遗传算法的湿式离合器压力自适应控制[J]. 吉林大学学报(工学版), 2024, 54(3): 852-864. |
| [4] | 刘果,熊坚,杨秀建,何扬帆. 基于曲率增广的智能车辆轨迹跟踪控制[J]. 吉林大学学报(工学版), 2024, 54(12): 3717-3728. |
| [5] | 张刘,曾庆铭,赵寰宇,范国伟. 基于Lyapunov理论的卫星大挠性太阳能帆板分布式自适应振动抑制控制方法[J]. 吉林大学学报(工学版), 2023, 53(9): 2676-2685. |
| [6] | 王德军,张凯然,徐鹏,顾添骠,于文雅. 基于车辆执行驱动能力的复杂路况速度规划及控制[J]. 吉林大学学报(工学版), 2023, 53(3): 643-652. |
| [7] | 刘岩,丁天威,王宇鹏,都京,赵洪辉. 基于自适应控制的燃料电池发动机热管理策略[J]. 吉林大学学报(工学版), 2022, 52(9): 2168-2174. |
| [8] | 张冲,胡云峰,宫洵,孙耀. 燃料电池阴极流量无模型自适应滑模控制器设计[J]. 吉林大学学报(工学版), 2022, 52(9): 2085-2095. |
| [9] | 聂光明,谢波,田彦涛. 基于Frenet框架的协同自适应巡航控制算法设计[J]. 吉林大学学报(工学版), 2022, 52(7): 1687-1695. |
| [10] | 刘明,荣学文,李贻斌,张帅帅,尹燕芳,阮久宏. 基于地形聚类分析的移动机器人速度自适应控制[J]. 吉林大学学报(工学版), 2021, 51(4): 1496-1505. |
| [11] | 谭永营,伊善贞,薛大兵,王晓明,袁磊. 负载型四足步行平台对角步态重量自适应行走控制[J]. 吉林大学学报(工学版), 2021, 51(4): 1506-1517. |
| [12] | 周挺,徐宇工,吴斌. 球形机器人的自适应分数阶PIλDμ滑模速度控制方法[J]. 吉林大学学报(工学版), 2021, 51(2): 728-737. |
| [13] | 陈吉清,蓝庆生,兰凤崇,刘照麟. 基于轮胎力预判与拟合的轨迹跟踪控制[J]. 吉林大学学报(工学版), 2020, 50(5): 1565-1573. |
| [14] | 吴爱国,韩俊庆,董娜. 基于极局部模型的机械臂自适应滑模控制[J]. 吉林大学学报(工学版), 2020, 50(5): 1905-1912. |
| [15] | 马彦,黄健飞,赵海艳. 基于车间通信的车辆编队控制方法设计[J]. 吉林大学学报(工学版), 2020, 50(2): 711-718. |
|