吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (3): 589-599.doi: 10.13229/j.cnki.jdxbgxb.20230685
• 车辆工程·机械工程 •
人机共驾下的驾驶行为数据滤波方法
高镇海1,2( ),蔡荣贵1,2,孙天骏1,2(),于桐1,2,赵浩源1,班浩3
),蔡荣贵1,2,孙天骏1,2(),于桐1,2,赵浩源1,班浩3
- 1.吉林大学 汽车工程学院,长春 130022
2.吉林大学 汽车底盘集成与仿生全国重点实验室,长春 130022
3.吉林大学 长沙汽车创新研究院,长沙 410016
Data⁃filtering method for driving behavior based on vehicle shared autonomy
Zhen-hai GAO1,2(),Rong-gui CAI1,2,Tian-jun SUN1,2(),Tong YU1,2,Hao-yuan ZHAO1,Hao BAN3
- 1.College of Automotive Engineering,Jilin University,Changchun 130022,China
2.National Key Laboratory of Automotive Chassis Integration and Bionics,Jilin University,Changchun 130022,China
3.Changsha Automobile Innovation Research Institute,Jilin University,Changsha 410016,China
摘要:
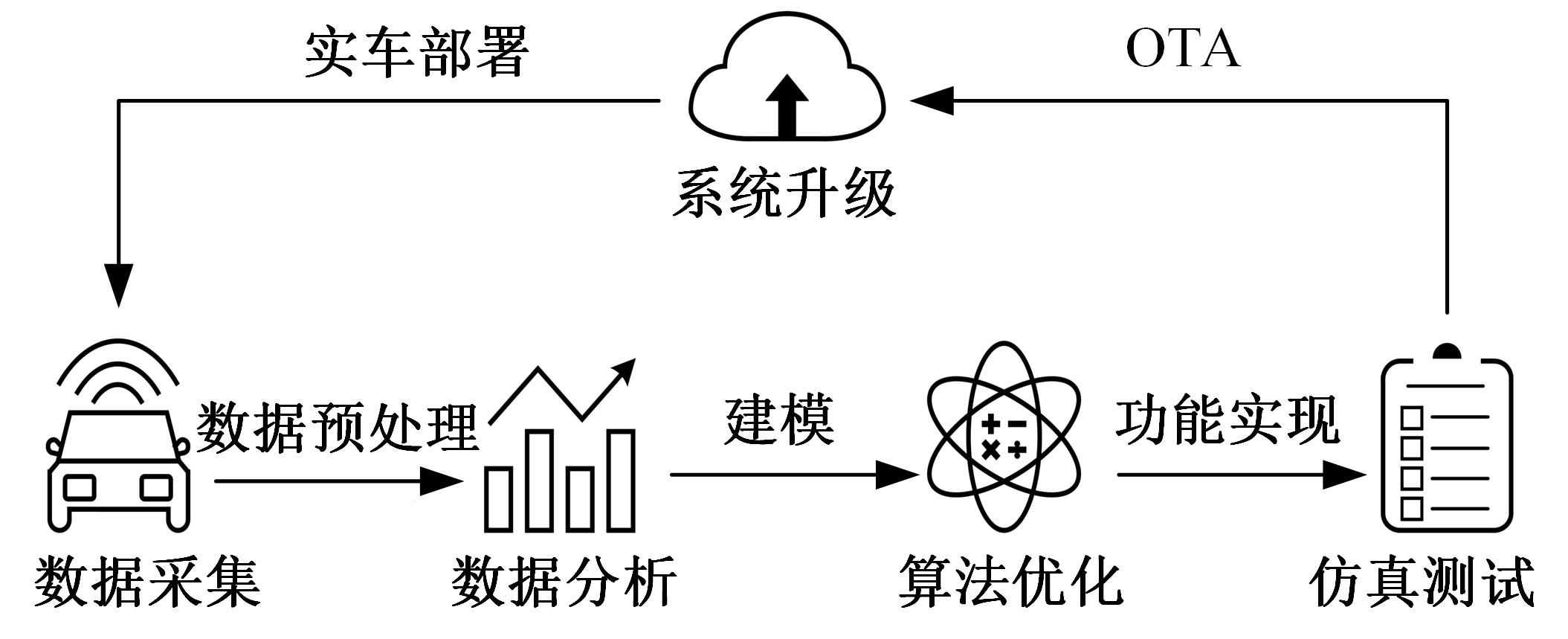
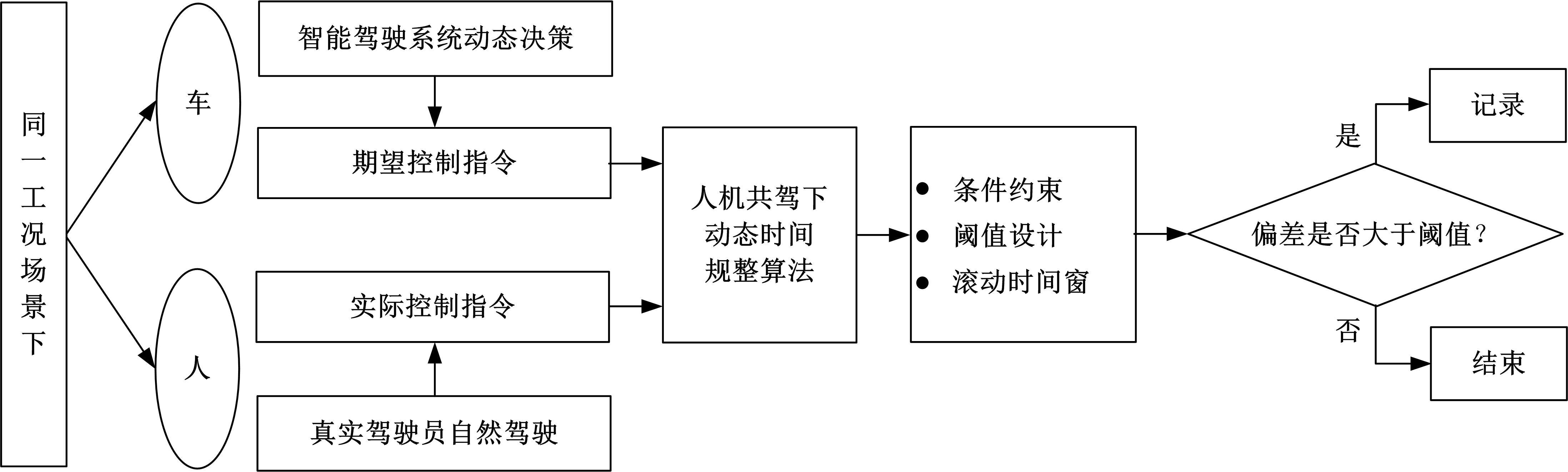
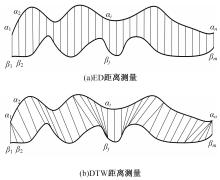
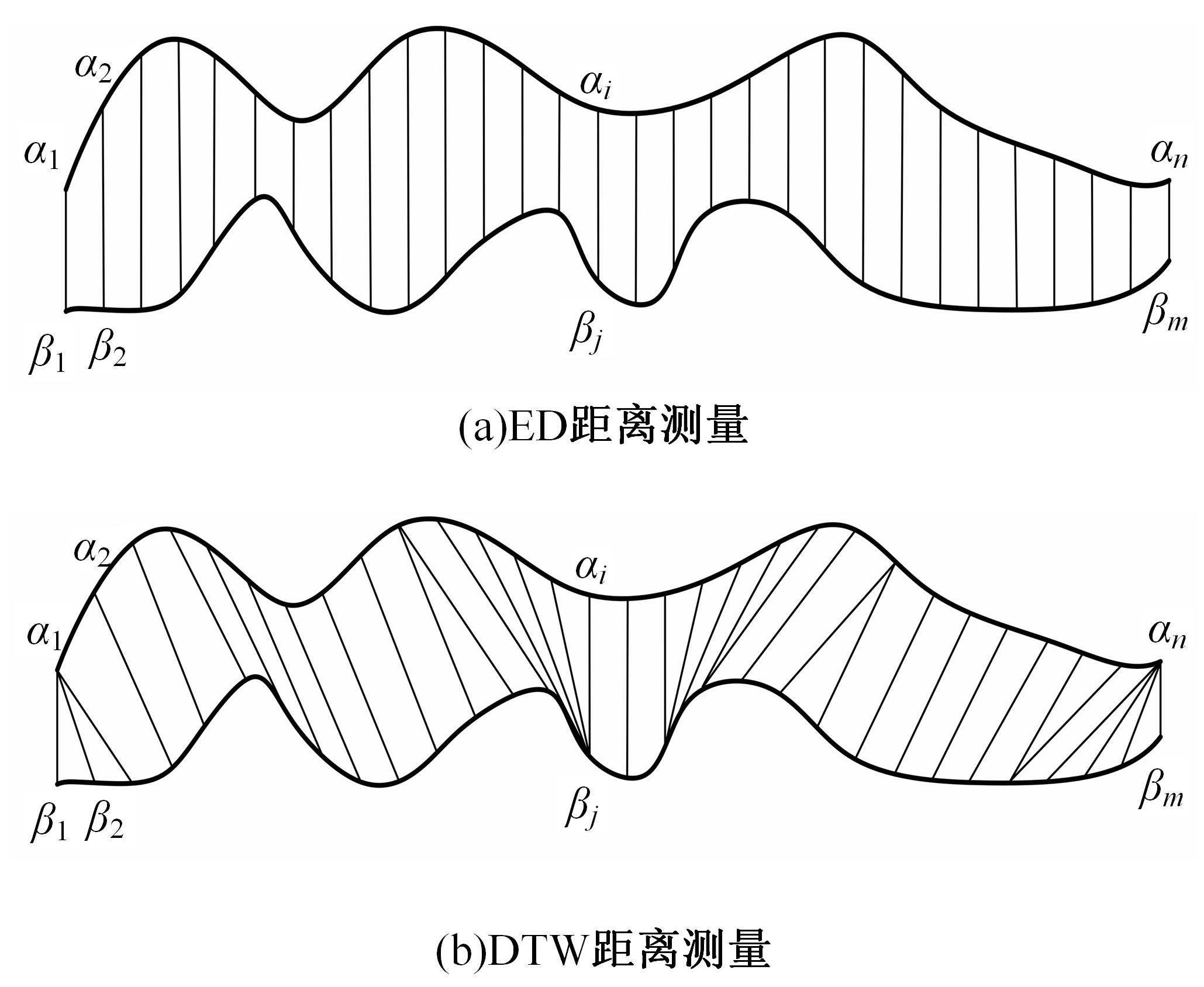
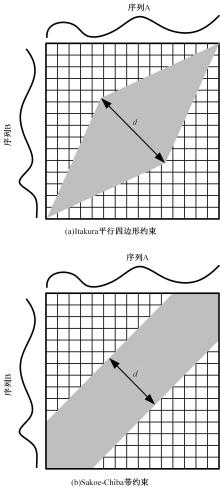
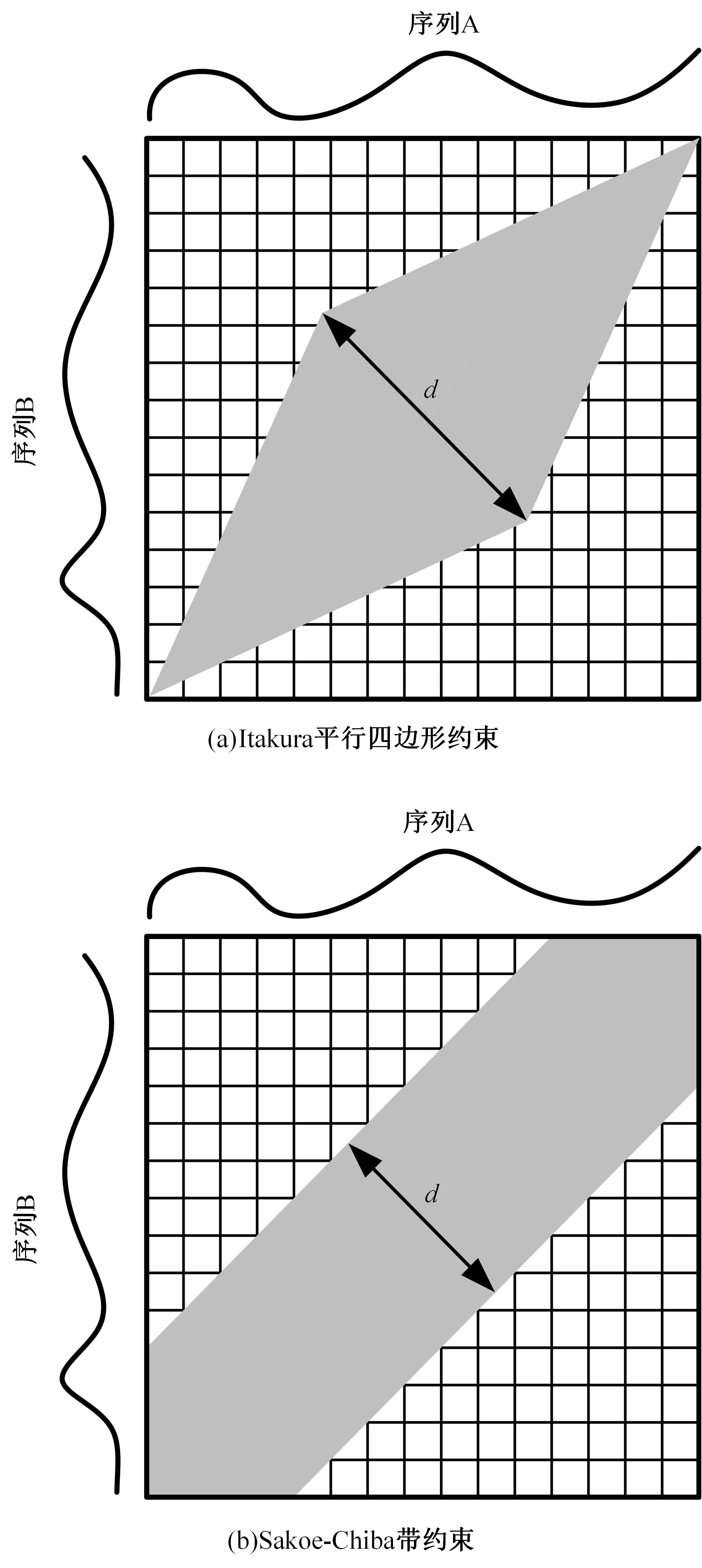
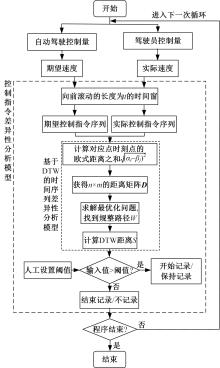
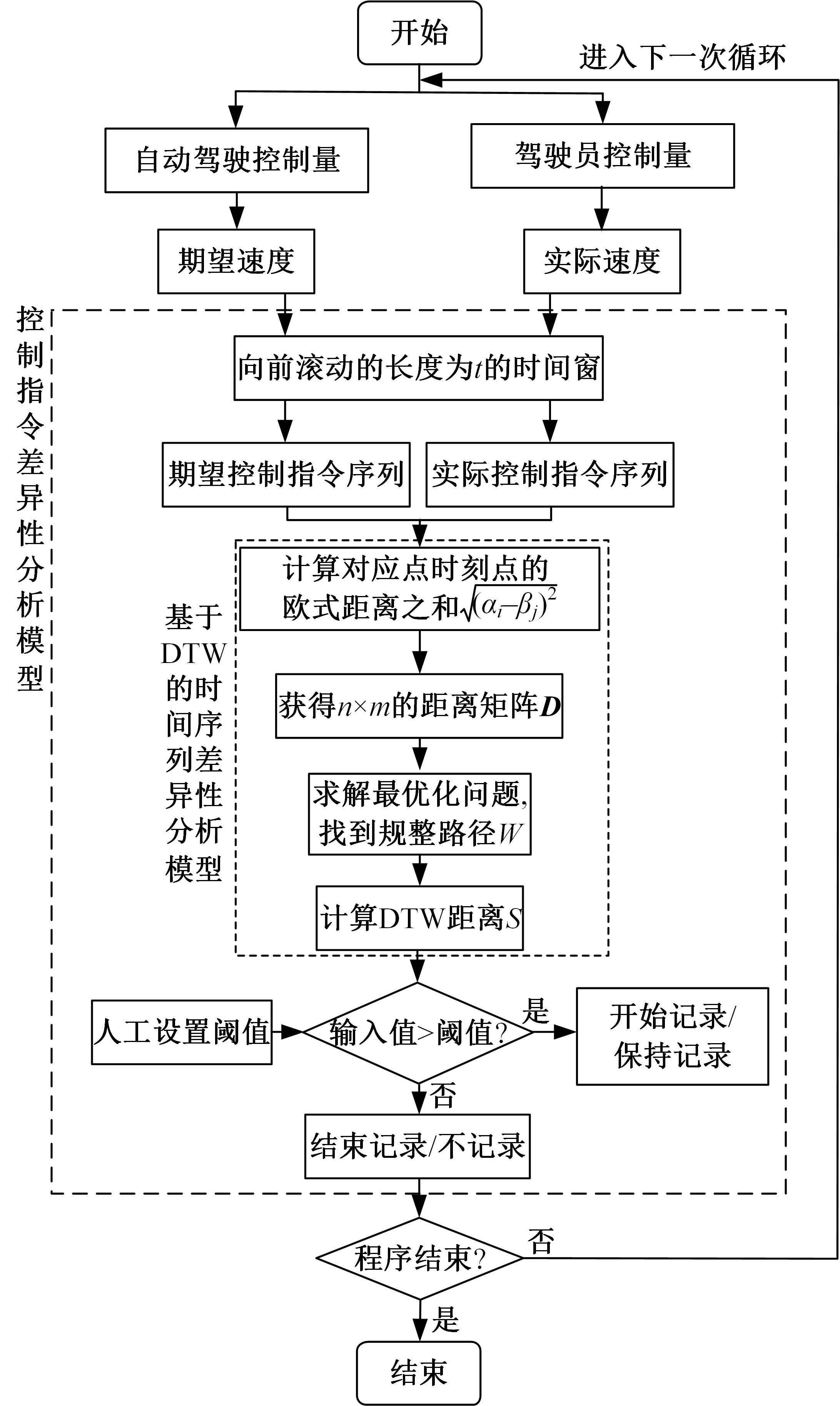
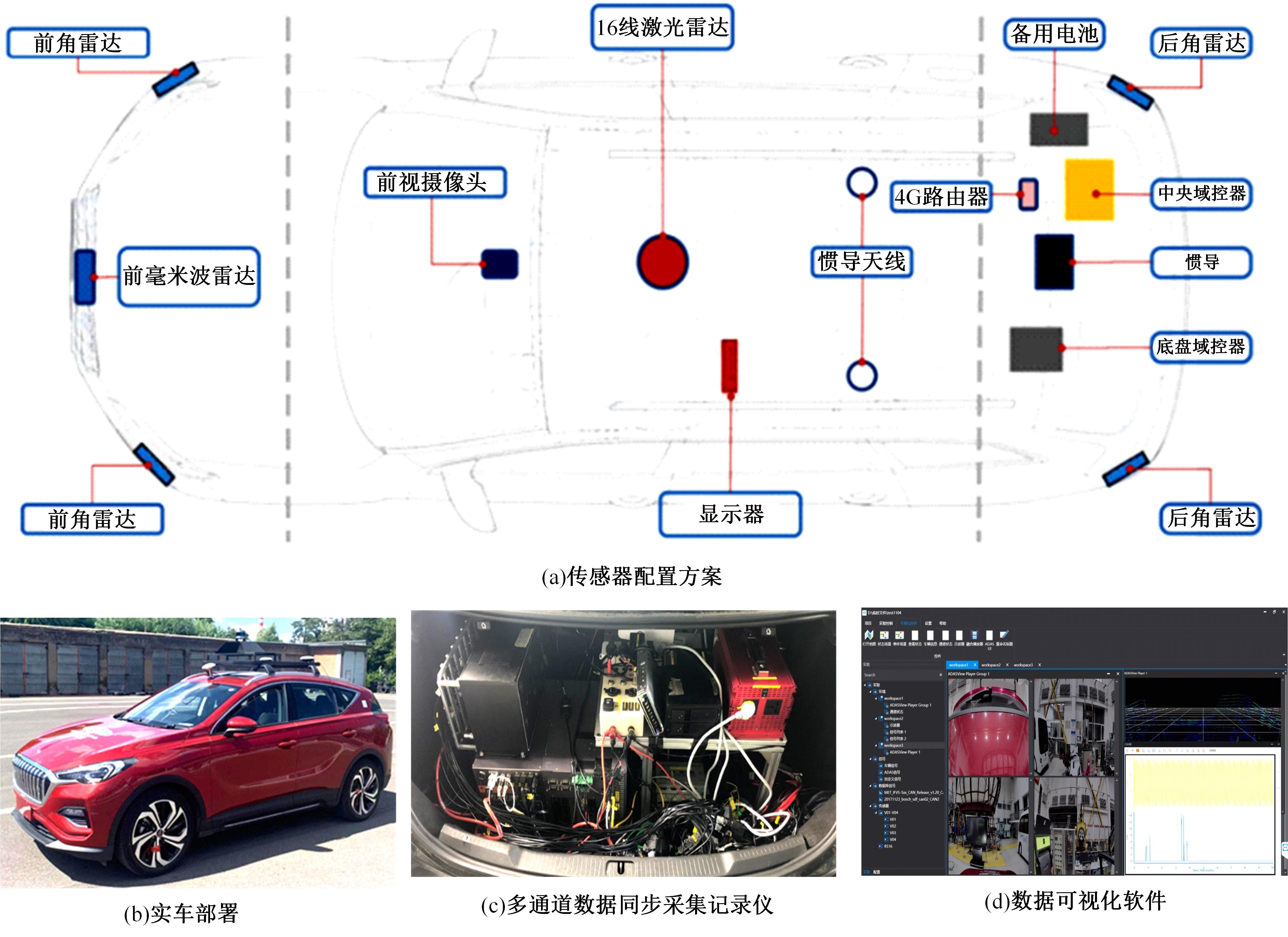
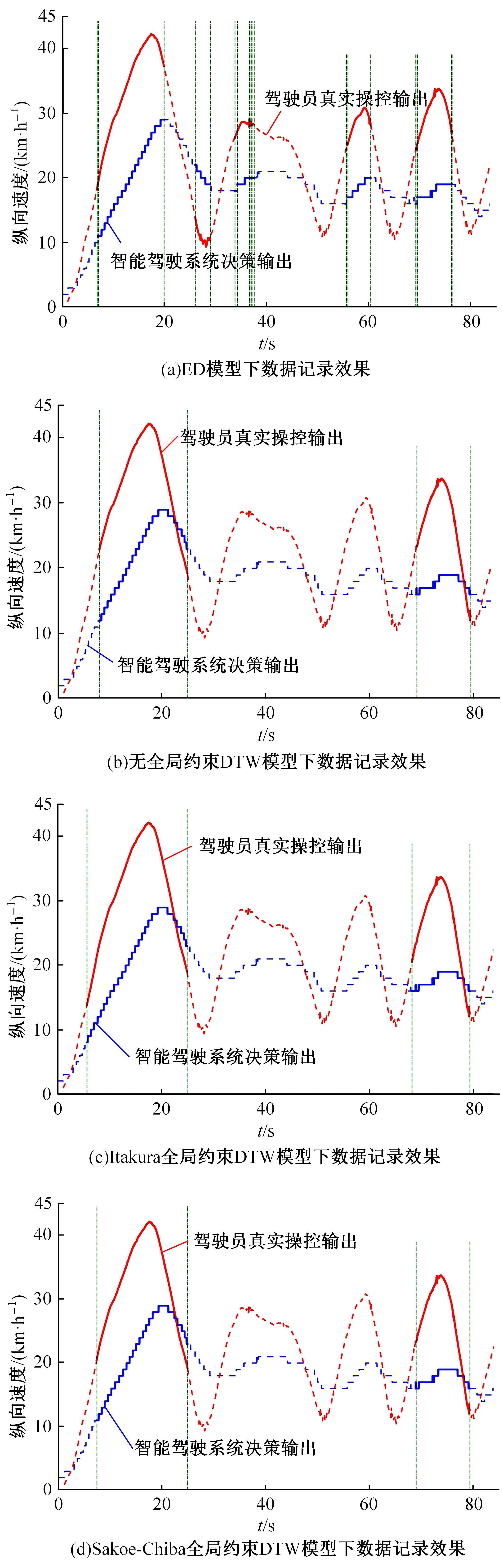
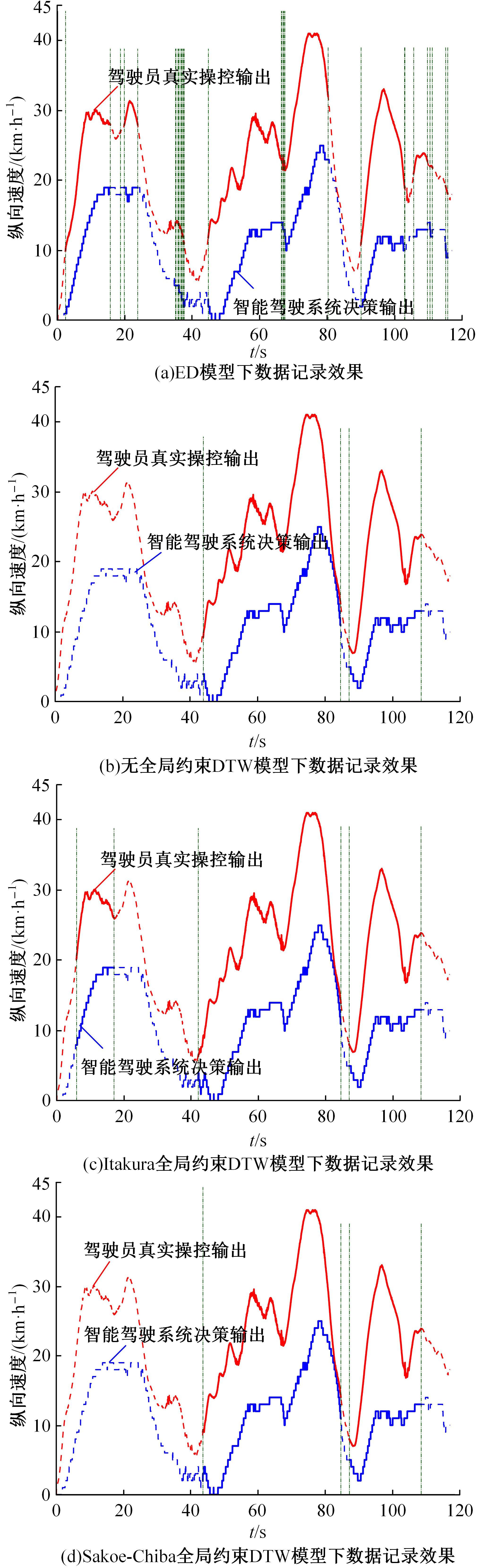
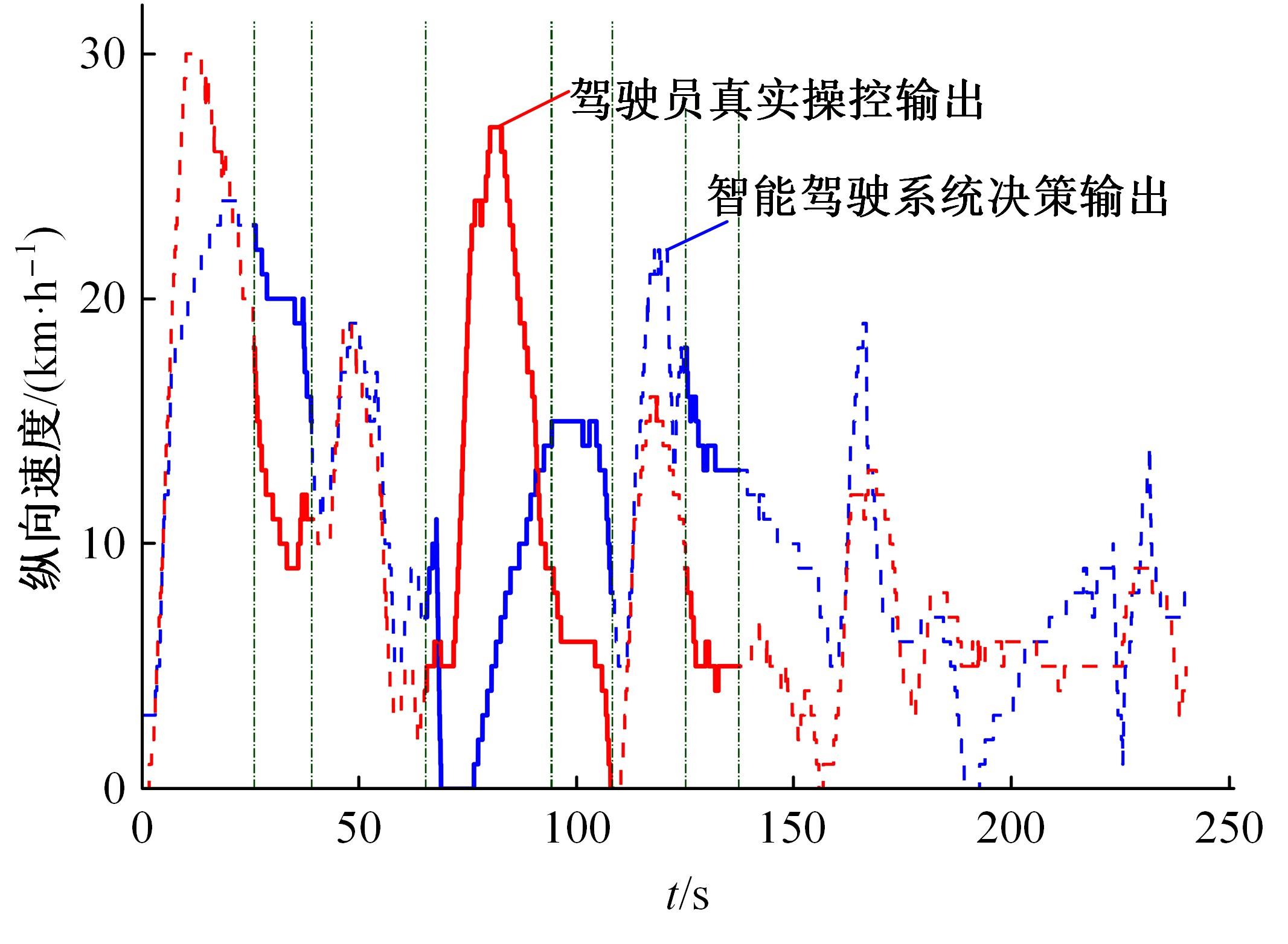
针对传统数据采集和分析过程中存在的低质量数据过冗余、特征数据难以挖掘以及人工记录耗时长的问题,提出了一种人机共驾环境下基于动态时间规整算法的驾驶行为数据滤波方法。首先,在Python环境下搭建了动态时间规整算法模型,实现以滚动时间窗的方式对两条序列进行实时偏差计算。然后,考虑不同距离计算方法的统计学特征设计了触发记录的偏差阈值,结合规整路径全局约束对模型进行优化。最后,进行仿真分析和实车测试,对比了不同约束条件下的数据滤波方法,可知基于Sakoe-Chiba约束条件的本文滤波方法在数据准备阶段就能平均自动滤除53.15%的无效数据,每小时可节省1.87 TB的数据存储空间,验证了本文方法的有效性和可行性。
中图分类号:
- TP29



| 1 | Shin S, Kang H, Kwon S. A Study on Data analysis for improving driving safety in field operational test (FOT) of autonomous vehicles[J]. Machines (Basel), 2022, 10(9): No. 784. |
| 2 | Hiller J, Koskinen S, Berta R, et al. The L3Pilot data management toolchain for a level 3 vehicle automation pilot[J]. Electronics (Basel), 2020, 9(5): No. 809. |
| 3 | 邓伟文, 李江坤, 任秉韬, 等. 面向自动驾驶的仿真场景自动生成方法综述[J]. 中国公路学报,2022,35(1): 316-333. |
| Deng Wei-wen, Li Jiang-kun, Ren Bing-tao, et al. A survey on automatic simulation scenario generation methods for autonomous driving[J]. China Journal of Highway and Transport, 2022, 35(1): 316-333. | |
| 4 | Coifman B, Wu M, Redmill K, et al. Collecting ambient vehicle trajectories from an instrumented probe vehicle: High quality data for microscopic traffic flow studies[J]. Transportation Research, Part C, Emerging Technologies, 2016, 72: 254-271. |
| 5 | Jordan G. Tesla's new Autopilot will run in "shadow mode" to prove that it's safer than human driving[EB/OL]. [2022-06-28]. |
| 6 | Anonymity. Tesla shadow mode in autopilot (FSD)[EB/OL]. [2022-06-28]. |
| 7 | U.S.Department of Transportation. Department of transportation, ensuring american leadership in automated vehicle technologies: automated vehicles 4.0[EB/OL]. [2022-06-28]. |
| 8 | 中华人民共和国工业和信息化部. 工业和信息化部关于加强智能网联汽车生产企业及产品准入管理的意见[EB/OL]. [2023-05-28]. |
| 9 | Bathaee N, Mohseni A, Park S, et al. A cluster analysis approach for differentiating transportation modes using Bluetooth sensor data[J]. Journal of Intelligent Transportation Systems, 2018, 22(4): 353-364. |
| 10 | Folkers A, Rick M, Buskens C, et al. Controlling an autonomous vehicle with deep reinforcement learning[C]∥2019 30th IEEE Intelligent Vehicles Symposium, Paris, France, 2019: 2025-2031. |
| 11 | Akagi Y, Kato R, Kitajima S, et al. A risk-index based sampling method to generate scenarios for the evaluation of automated driving vehicle safety[C]∥2019 IEEE Intelligent Transportation Systems Conference, Auckland, New Zealand, 2019: No. 2153. |
| 12 | Zhang Z S, Yang D G, Zhang T, et al. A study on the method for cleaning and repairing the probe vehicle data[J]. IEEE Transactions on Intelligent Transportation Systems, 2013, 14(1): 419-427. |
| 13 | Gao Z H, Zhu N X, Gao F, et al. A self-learning lane change motion planning system considering the driver's personality[J]. Proceedings of the Institution of Mechanical Engineers, Part D, Journal of Automobile Engineering, 2013, 235(14): 3322-3338. |
| 14 | Zhang H, Zhou H J, Sun J, et al. Risk assessment of highly automated vehicles with naturalistic driving data: a surrogate-based optimization method[C]∥2022 IEEE Intelligent Vehicles Symposium, Aachen, Germany, 2022: 580-585. |
| 15 | Sun T J, Gao Z H, Gao F, et al. A brain-inspired decision-making linear neural network and its application in automatic drive[J]. Sensors, 2021, 21(3): 794-814. |
| 16 | Sun T J, Gao Z H, Chang Z Y, et al. Brain-like intelligent decision-making based on basal ganglia and its application in automatic car-following[J]. Journal of Bionic Engineering, 2021, 18(6): 1439-1451. |
| 17 | 王殿海, 金盛. 车辆跟驰行为建模的回顾与展望[J]. 中国公路学报, 2012, 25(1): 115-127. |
| Wang Dian-hai, Jin Sheng. Review and outlook of modeling of car following behavior[J]. China Journal of Highway and Transport, 2012, 25(1): 115-127. | |
| 18 | 贺正冰, 徐瑞康, 谢东繁, 等. 数据驱动跟驰模型综述[J]. 交通运输系统工程与信息, 2021, 21(5):102-113. |
| He Zheng-bing, Xu Rui-kang, Xie Dong-fan, et al. A review of data-driven car-following models[J]. Journal of Transportation Systems Engineering and Information Technology, 2021, 21(5): 102-113. | |
| 19 | 吴光强, 陶义超, 曾翔. 数据驱动的变速器传感器故障诊断方法[J]. 同济大学学报: 自然科学版, 2021, 49(2): 272-279. |
| Wu Guang-qiang, Tao Yi-chao, Zeng Xiang. Data-driven fault diagnosis method for transmission sensors[J]. Journal of Tongji University (Natural Science), 2021, 49(2): 272-279. | |
| 20 | 赵健, 宋东鉴, 朱冰, 等. 基于自学习和监督学习混合驱动的智能汽车跟驰控制策略[J].中国公路学报,2022,35(3): 55-65. |
| Zhao Jian, Song Dong-jian, Zhu Bing, et al. Intelligent vehicle-following control strategy based on self-learning and supervised-learning hybrid-driven framework[J]. China Journal of Highway and Transport, 2022, 35(3): 55-65. | |
| 21 | Wegener J, van Putten S, Neubeck J,等. 数据挖掘推动客户数据驱动车辆的开发进程[J]. 同济大学学报: 自然科学版, 2021, 49(): 1-10. |
| Wegener J, van Putten S, Neubeck J,et al. Data mining as an enabler for customer data driven vehicle development[J]. Journal of Tongji University (Natural Science), 2021, 49(Sup.1): 1-10. | |
| 22 | 高振海, 于桐, 孙天骏, 等. 面向无人驾驶的数据采集与分析系统研究综述[J]. 汽车技术, 2021(6): 1-11. |
| Gao Zhen-hai, Yu Tong, Sun Tian-jun, et al. Review on data acquisition and analysis system for autonomous vehicles[J]. Automobile Technology, 2021(6): 1-11. | |
| 23 | Gao Z H, Yu T, Sun T J, et al. Data filtering method for intelligent vehicle shared autonomy based on a dynamic time warping algorithm[J]. Sensors, 2022, 22(23): 9436-9453. |
| 24 | Koppanyi Z, Toth C K. Experiences with acquiring highly redundant spatial data to support driverless vehicle technologies[J/OL]. [2022-06-28]. Ⅳ-2-161-2018 |
| 25 | 蔡英凤, 陆子恒, 李祎承, 等. 基于多传感器融合的紧耦合SLAM系统[J]. 汽车工程, 2022, 44(3): 350-361. |
| Cai Ying-feng, Lu Zi-heng, Li Yi-cheng, et al. Tightly coupled SLAM system based on multi-sensor fusion[J]. Automotive Engineering, 2022, 44(3): 350-361. | |
| 26 | 罗玉涛, 秦瀚. 基于稀疏彩色点云的自动驾驶汽车3D目标检测方法[J]. 汽车工程, 2021,43(4):492-500. |
| Luo Yu-tao, Qin Han. 3D Object detection method for autonomous vehicle based on sparse color point cloud[J]. Automotive Engineering, 2021, 43(4): 492-500. | |
| 27 | Yi D W, Su J Y, Liu C J, et al. A machine learning based personalized system for driving state recognition[J]. Transportation Research Part C, 2019, 105: 241-261. |
| 28 | Gahr B, Liu S, Koch K, et al. Driver identification via the steering wheel[J/OL]. [2022-06-28]. |
| 29 | Ung N C, Wallace B, Chan A D C, et al. Driver identification using vehicle acceleration and deceleration events from naturalistic driving of older drivers[C]∥2017 IEEE International Symposium on Medical Measurements and Applications, Rochester, USA, 2017:33-38. |
| 30 | 熊璐, 李志强, 姚杰. 面向低速清扫车的信息融合车辆跟踪方法[J]. 中国公路学报, 2019, 32(6): 61-70. |
| Xiong Lu, Li Zhi-qiang, Yao Jie. Vehicle tracking method based on information fusion for low-speed sweeper vehicles[J]. China Journal of Highway and Transport, 2019, 32(6): 61-70. | |
| 31 | 高振海, 朱乃宣, 高菲, 等. 考虑驾驶员特性的自学习换道轨迹规划系统[J]. 汽车工程, 2020, 42(12): 1710-1717. |
| Gao Zhen-hai, Zhu Nai-xuan, Gao Fei, et al. Self-learning lane-change trajectory planning system with driver characteristics[J]. Automotive Engineering, 2020, 42(12): 1710-1717. | |
| 32 | Itakura F. Minimum prediction residual principle applied to speech recognition[J]. IEEE Transactions on Acoustics, Speech, and Signal Processing, 1975, 23(1): 67-72. |
| 33 | Sakoe H, Chiba S. Dynamic programming algorithm optimization for spoken word recognition[J]. IEEE Transactions on Acoustics, Speech, and Signal Processing, 1978, 26(1): 43-49. |
| 34 | Rakthanmanon T, Campana B, Mueen A, et al. Searching and mining trillions of time series subsequences under dynamic time warping[C]∥Proceedings of the ACM SIGKDD International Conference on Knowledge, Discovery and Data Mining, Beijing, China, 2012: 262-270. |
| 35 | 谢枫, 娄静涛, 赵凯, 等. 基于行为识别和曲率约束的车辆轨迹预测方法研究[J]. 汽车工程, 2019, 41(9):1036-1042. |
| Xie Feng, Lou Jing-tao, Zhao Kai, et al. A research on vehicle trajectory prediction method based on behavior recognition and curvature constraints[J]. Automotive Engineering, 2019, 41(9): 1036-1042. | |
| 36 | Liu X L, Wang Y F, Jiang K, et al. Interactive trajectory prediction using a driving risk map-integrated deep learning method for surrounding vehicles on highways[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(10): 1-12. |
| 37 | Du R L, Liu J Q, Gao L, et al. Long term trajectory prediction based on advanced guidance law recognition[C]∥2017 IEEE International Workshop on Metrology for AeroSpace, Padua, Italy, 2017: 456-461. |
| [1] | 邓小林,杨馥模,覃善甘. 新型仿竹六边形梯度层级多胞管耐撞性对比分析[J]. 吉林大学学报(工学版), 2024, 54(2): 333-345. |
| [2] | 王毅刚,王玉鹏,张昊,赵思安. 高速列车转向架区域气动噪声源识别与分析[J]. 吉林大学学报(工学版), 2024, 54(2): 346-355. |
| [3] | 聂建军,侯军凯,解晓琳,鄢鸿桢. 新型巡检机器人移动底盘设计及越障性能分析[J]. 吉林大学学报(工学版), 2024, 54(2): 356-364. |
| [4] | 胡宏宇,张慧珺,姚荣涵,陈国迎,高菲. L3级自动驾驶接管过程驾驶员情景意识研究[J]. 吉林大学学报(工学版), 2024, 54(2): 410-418. |
| [5] | 李旭东,王新宇,田程,张新峰,牛治慧,赵志强. 基于用户关联的车辆耐久性载荷谱编制[J]. 吉林大学学报(工学版), 2024, 54(1): 66-75. |
| [6] | 吴骁,史文库,郭年程,赵燕燕,陈志勇,李鑫鹏,孙卓,刘健. 基于Ease off的准双曲面齿轮多目标优化[J]. 吉林大学学报(工学版), 2024, 54(1): 76-85. |
| [7] | 王铁,李旭东,田程,赵宏伟. 基于多轴载荷投影构建轮辋双轴疲劳损伤模型[J]. 吉林大学学报(工学版), 2024, 54(1): 99-104. |
| [8] | 陈兆玮,蒲前华. 弹性车轮对大跨斜拉桥车桥耦合振动的抑制特性[J]. 吉林大学学报(工学版), 2023, 53(9): 2519-2532. |
| [9] | 黄学劲,钟锦星,路京雨,赵霁,肖伟,袁新枚. 基于用户画像的电动汽车充电负荷预测方法[J]. 吉林大学学报(工学版), 2023, 53(8): 2193-2200. |
| [10] | 刘平义,李晓婷,高偌霖,李海涛,魏文军,王亚. 车辆侧倾驱动机构设计与试验[J]. 吉林大学学报(工学版), 2023, 53(8): 2185-2192. |
| [11] | 张树培,夏明悦,张玮,陈钊,陈义祥. 考虑非线性刚度的间隙球铰碰撞动力学建模与仿真[J]. 吉林大学学报(工学版), 2023, 53(8): 2227-2235. |
| [12] | 陈辉,邵亚军. 基于惯性基准多传感器耦合的路面谱测量方法[J]. 吉林大学学报(工学版), 2023, 53(8): 2254-2262. |
| [13] | 刘振亮,赵存宝,吴云鹏,马迷娜,马龙双. 数据驱动的公路桥梁网络全寿命抗震韧性评估[J]. 吉林大学学报(工学版), 2023, 53(6): 1695-1701. |
| [14] | 田彦涛,黄兴,卢辉遒,王凯歌,许富强. 基于注意力与深度交互的周车多模态行为轨迹预测[J]. 吉林大学学报(工学版), 2023, 53(5): 1474-1480. |
| [15] | 尹燕莉,黄学江,潘小亮,王利团,詹森,张鑫新. 基于PID与Q⁃Learning的混合动力汽车队列分层控制[J]. 吉林大学学报(工学版), 2023, 53(5): 1481-1489. |
|
||