吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (5): 1481-1489.doi: 10.13229/j.cnki.jdxbgxb.20210915
• 通信与控制工程 • 上一篇
基于PID与Q⁃Learning的混合动力汽车队列分层控制
尹燕莉1,2( ),黄学江1,潘小亮3,王利团2,詹森1,张鑫新1
),黄学江1,潘小亮3,王利团2,詹森1,张鑫新1
- 1.重庆交通大学 机电与车辆工程学院,重庆 400074
2.包头北奔重型汽车有限公司,内蒙古 包头 014000
3.重庆长安汽车股份有限公司,重庆 401120
Hierarchical control of hybrid electric vehicle platooning based on PID and Q⁃Learning algorithm
Yan-li YIN1,2(),Xue-jiang HUANG1,Xiao-liang PAN3,Li-tuan WANG2,Sen ZHAN1,Xin-xin ZHANG1
- 1.School of Mechatronics and Vehicle Engineering,Chongqing Jiaotong University,Chongqing 400074,China
2.Baotou Bei Ben Heavy Vehicle Co. ,Ltd. ,Baotou 014000,China
3.Chongqing Changan Automobile Co. ,Ltd. ,Chongqing 401120,China
摘要:
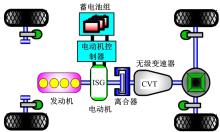
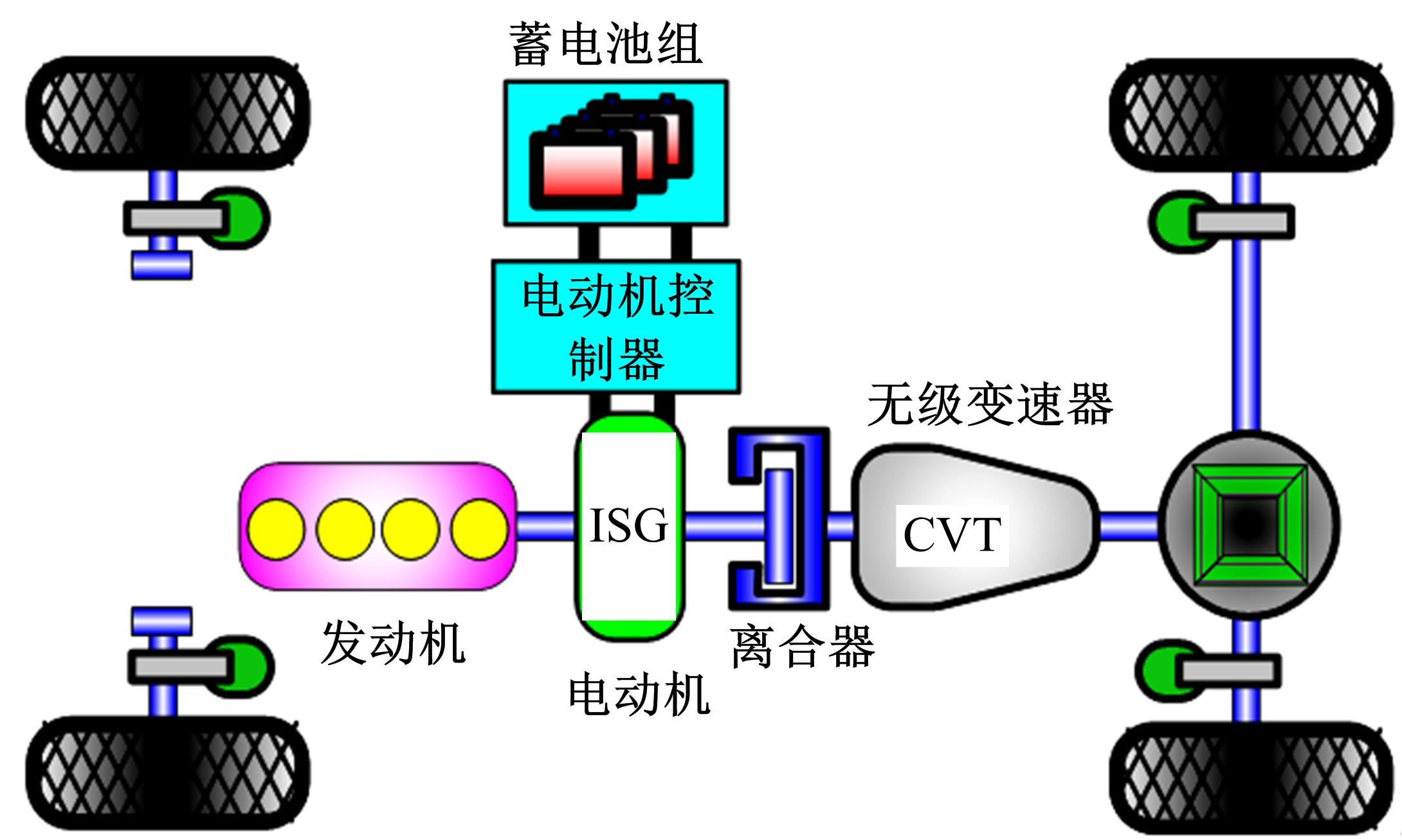
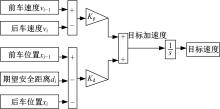
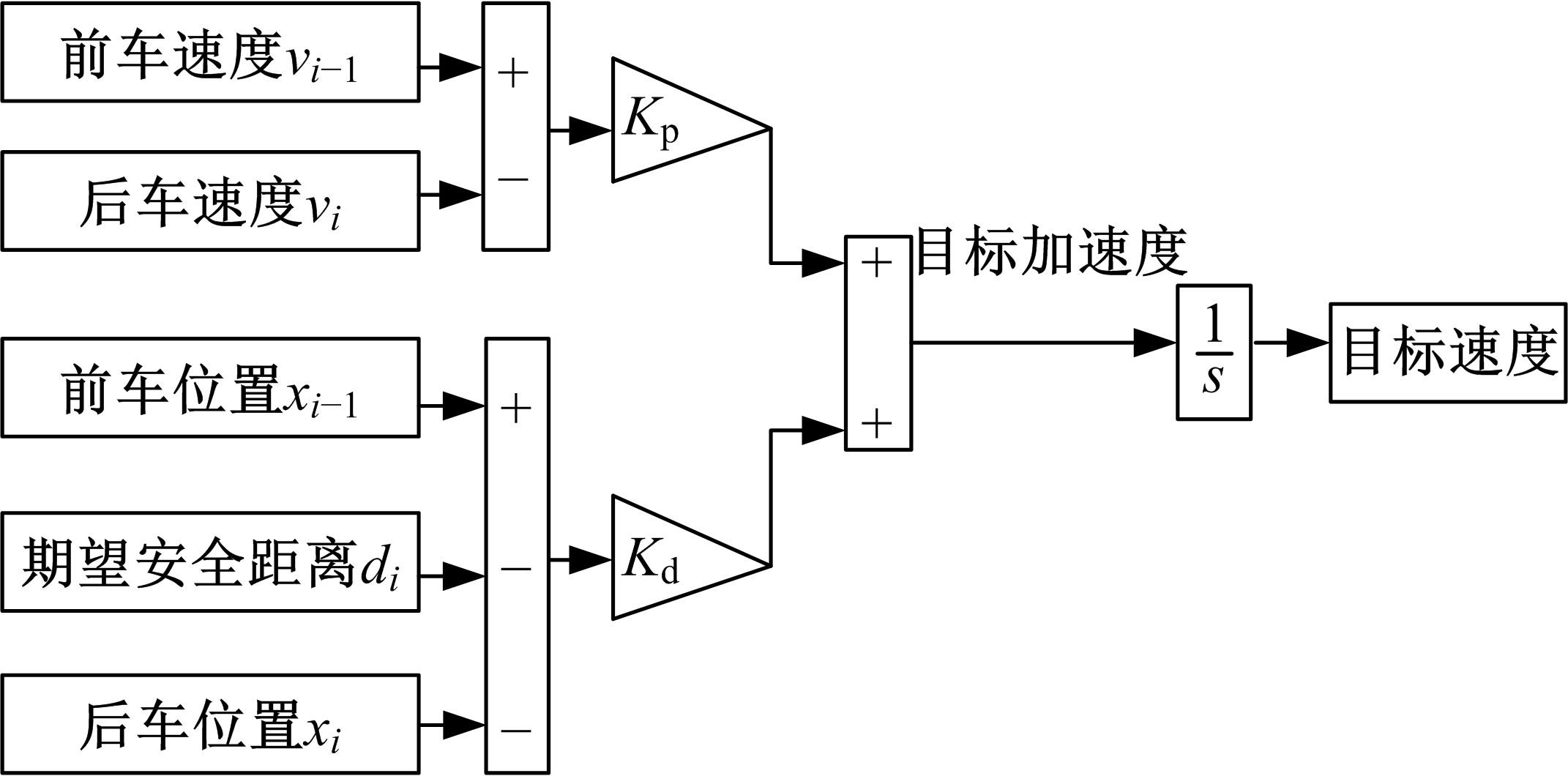
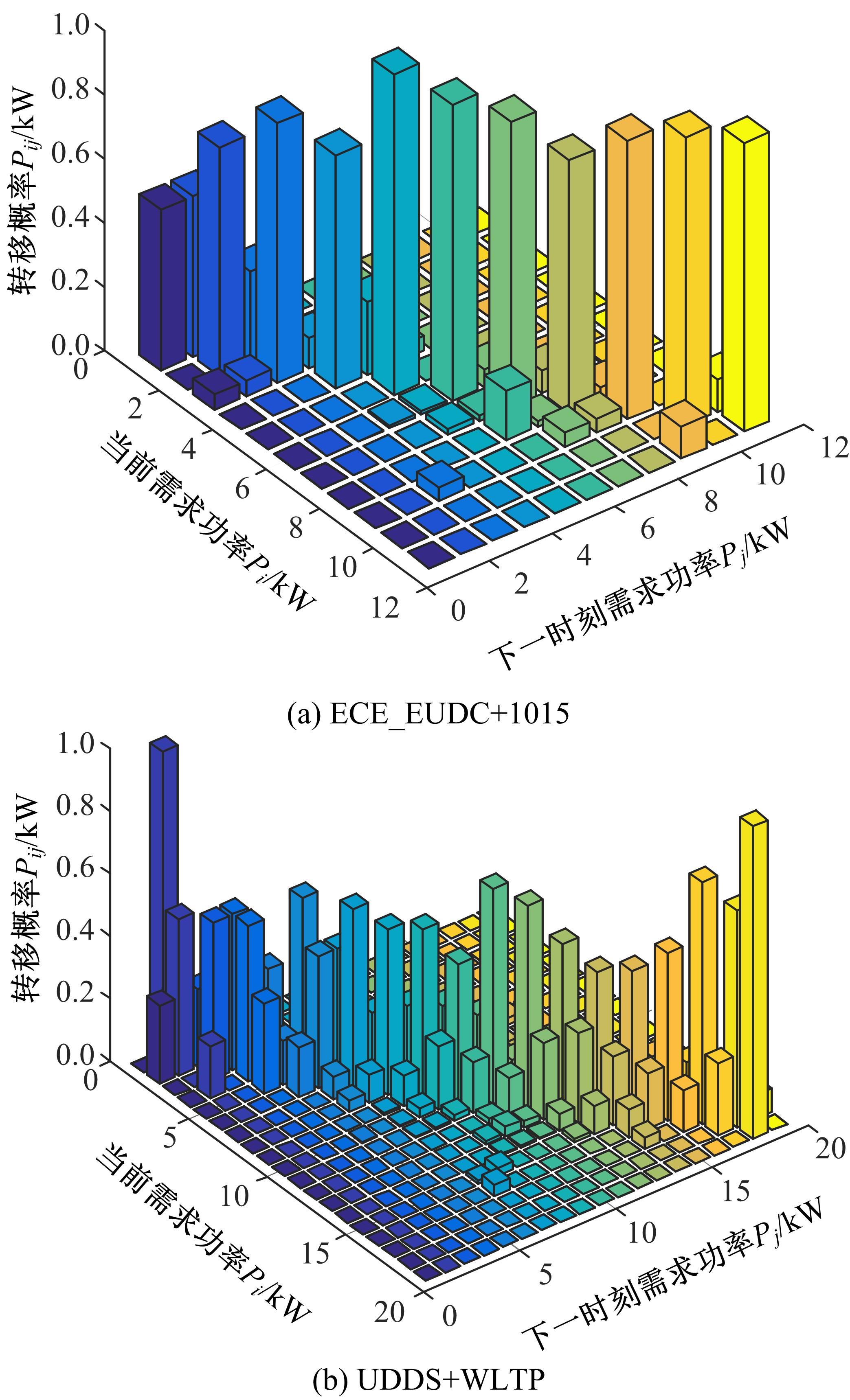
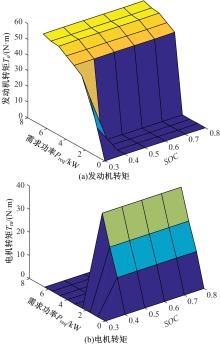
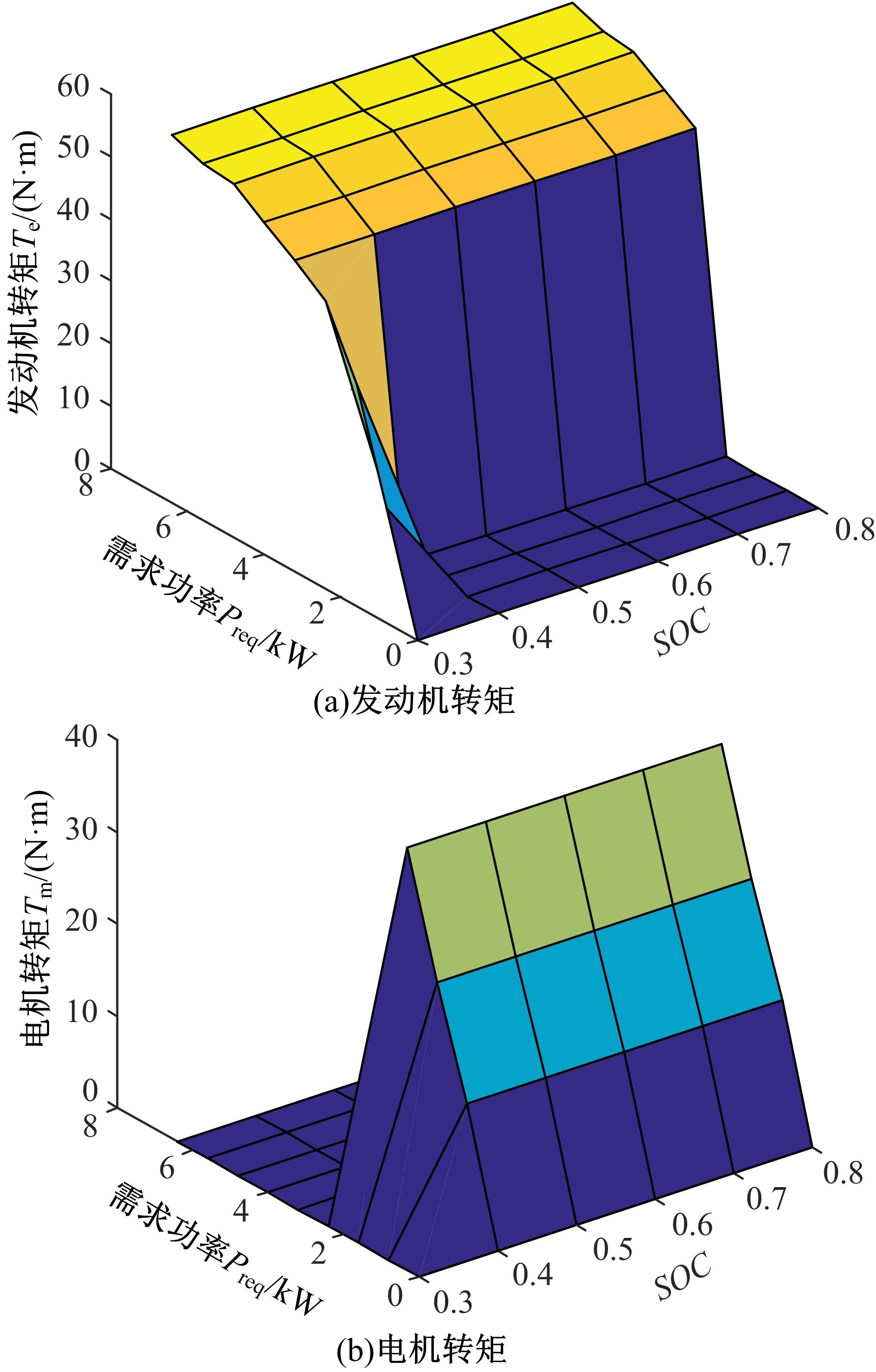
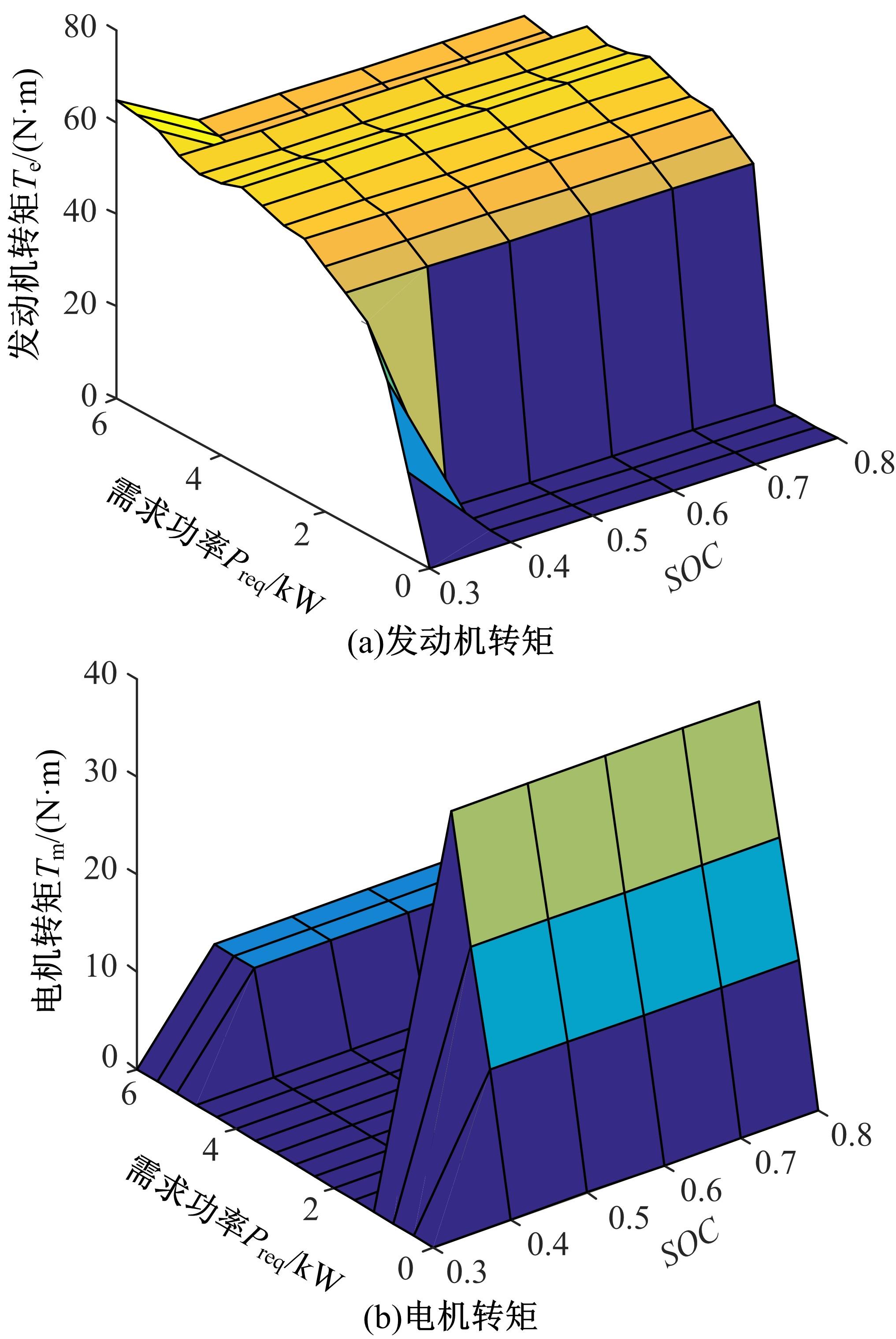
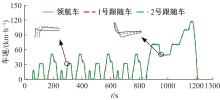
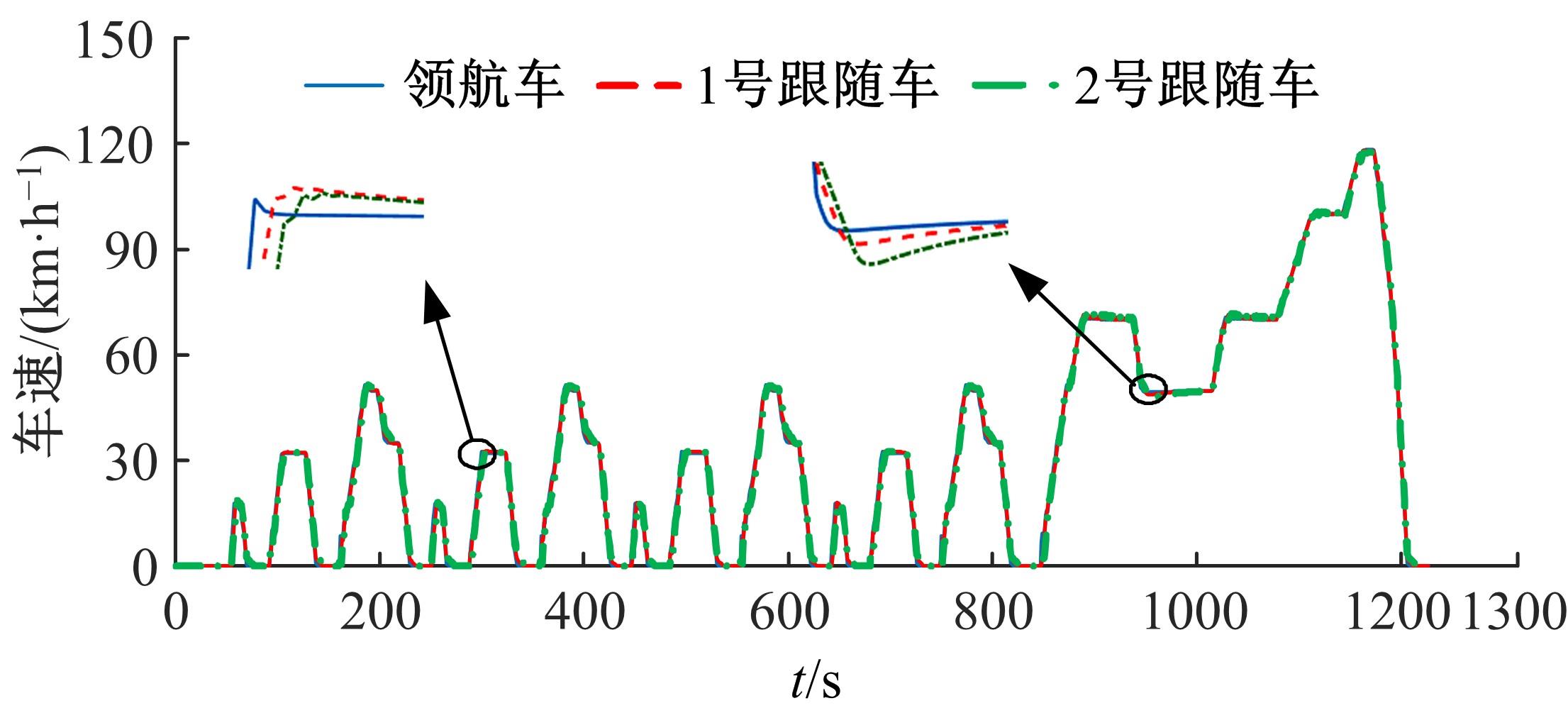
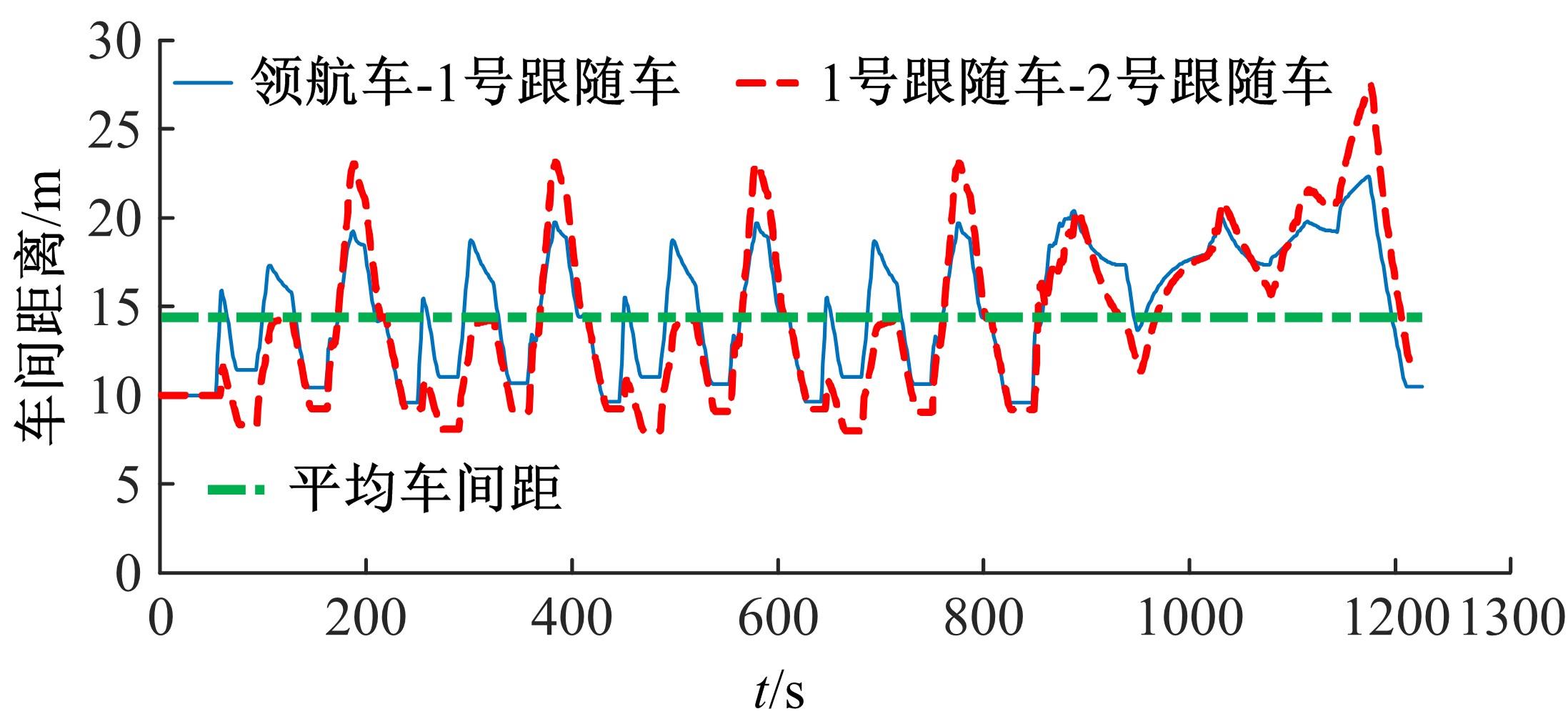
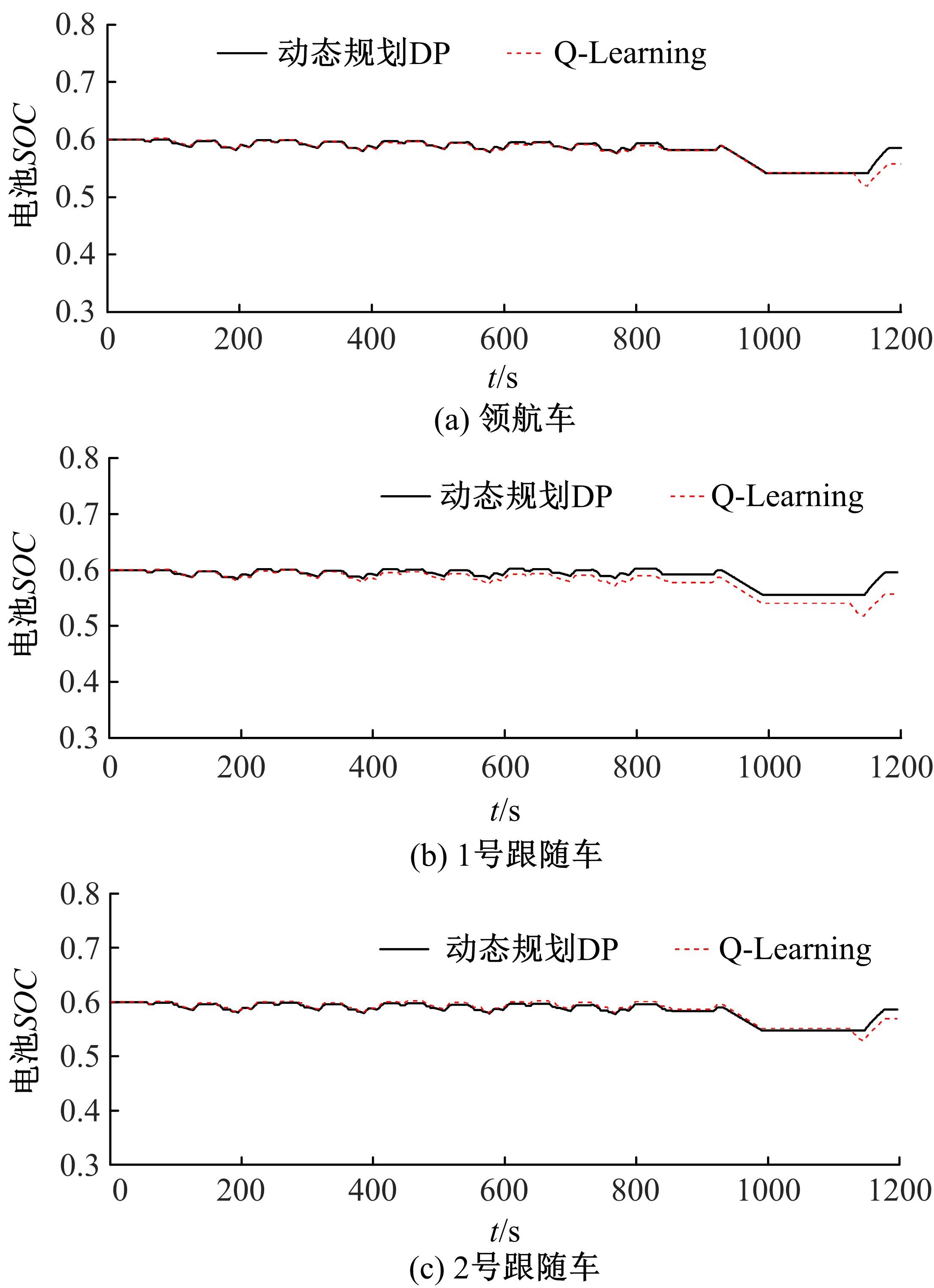
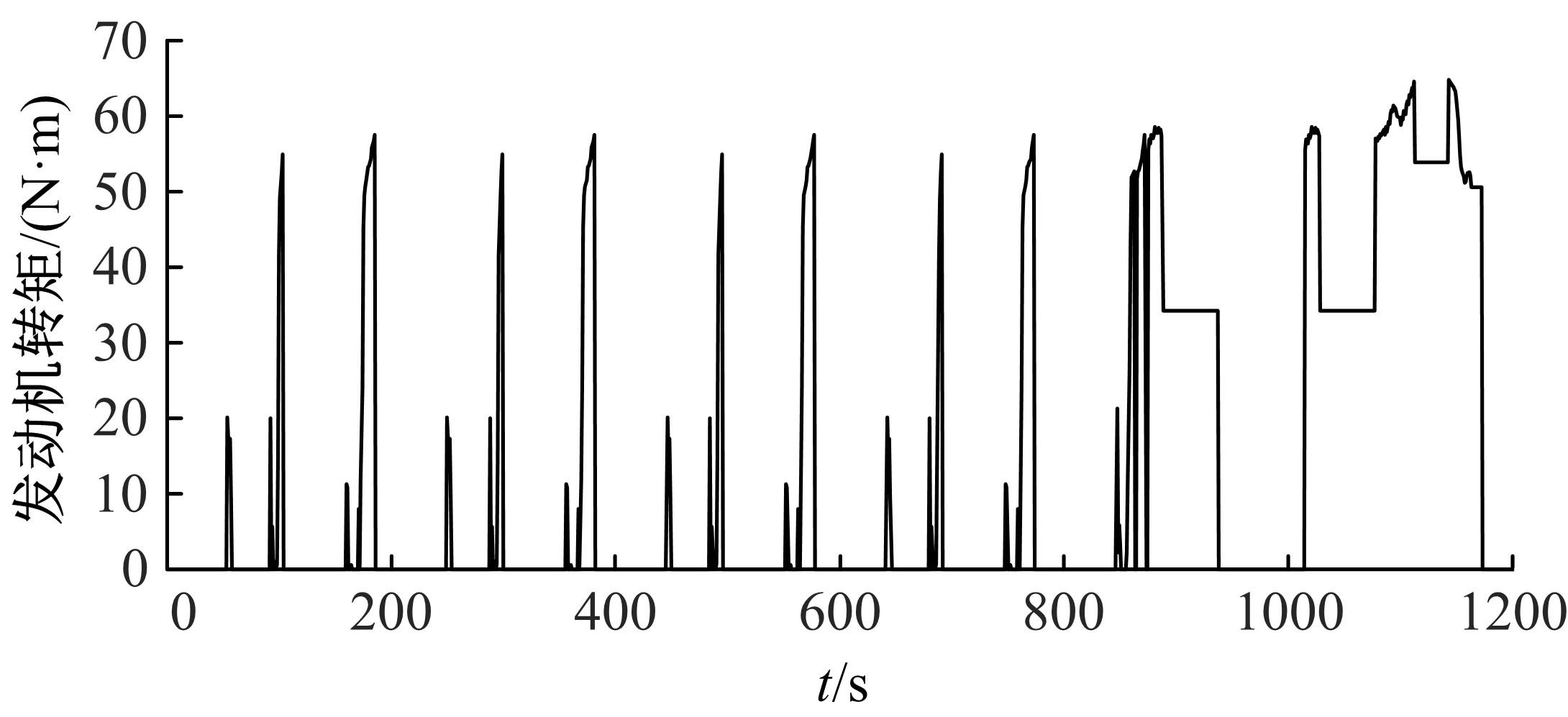
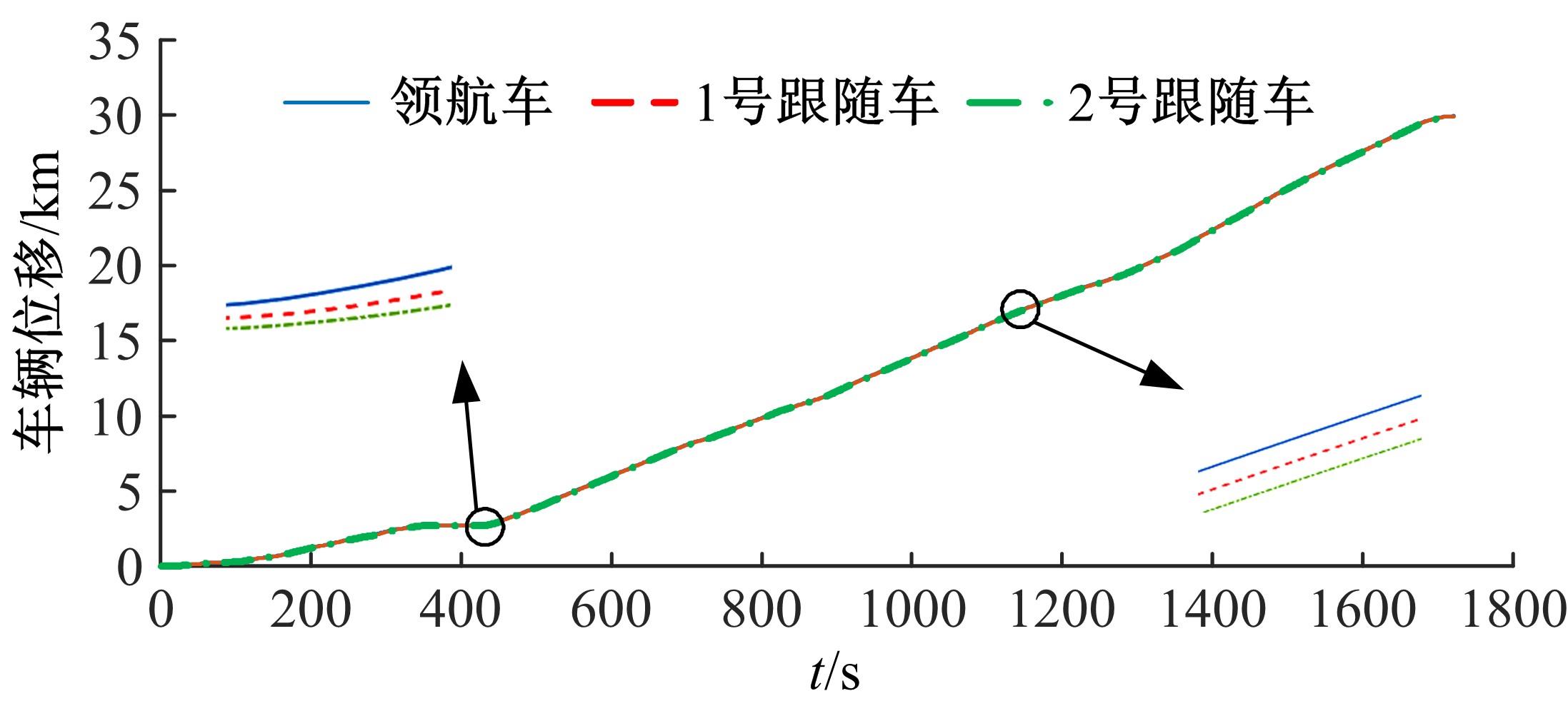
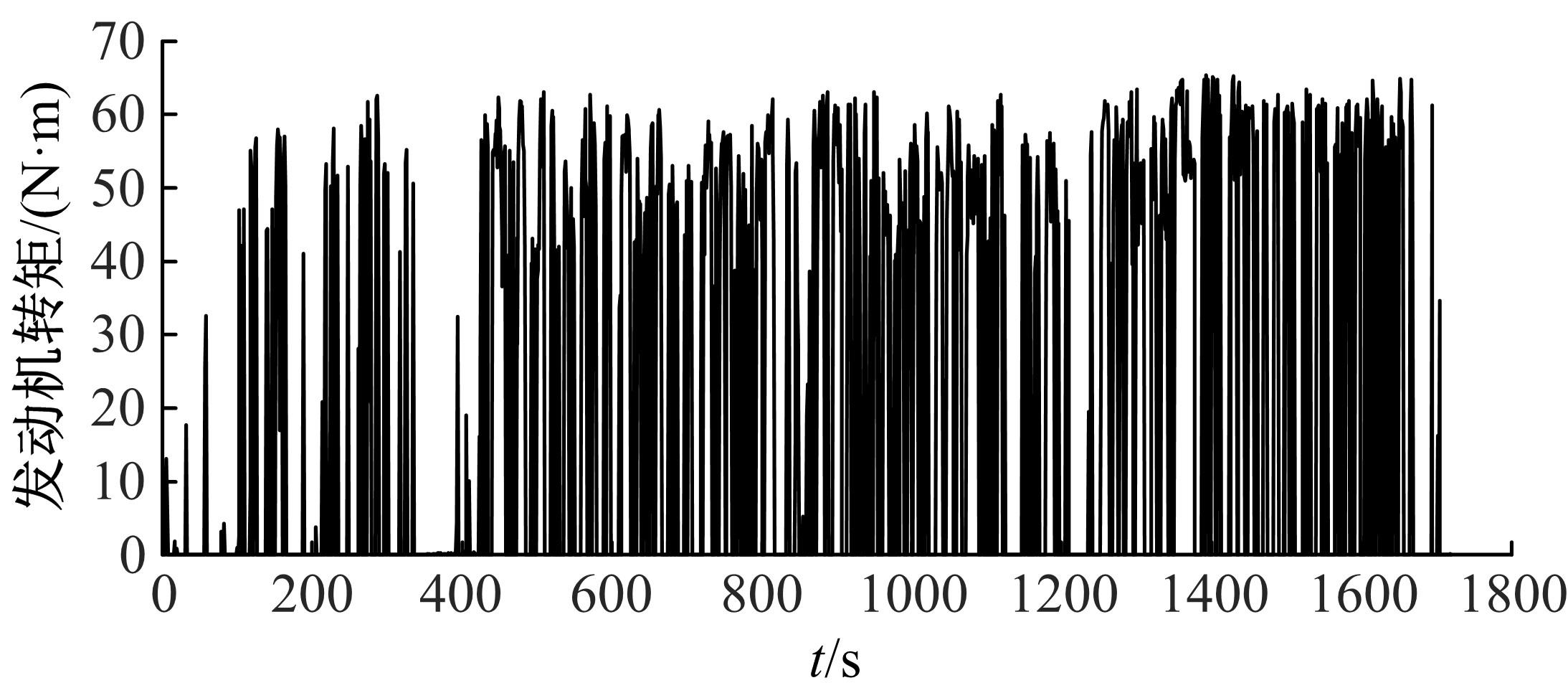
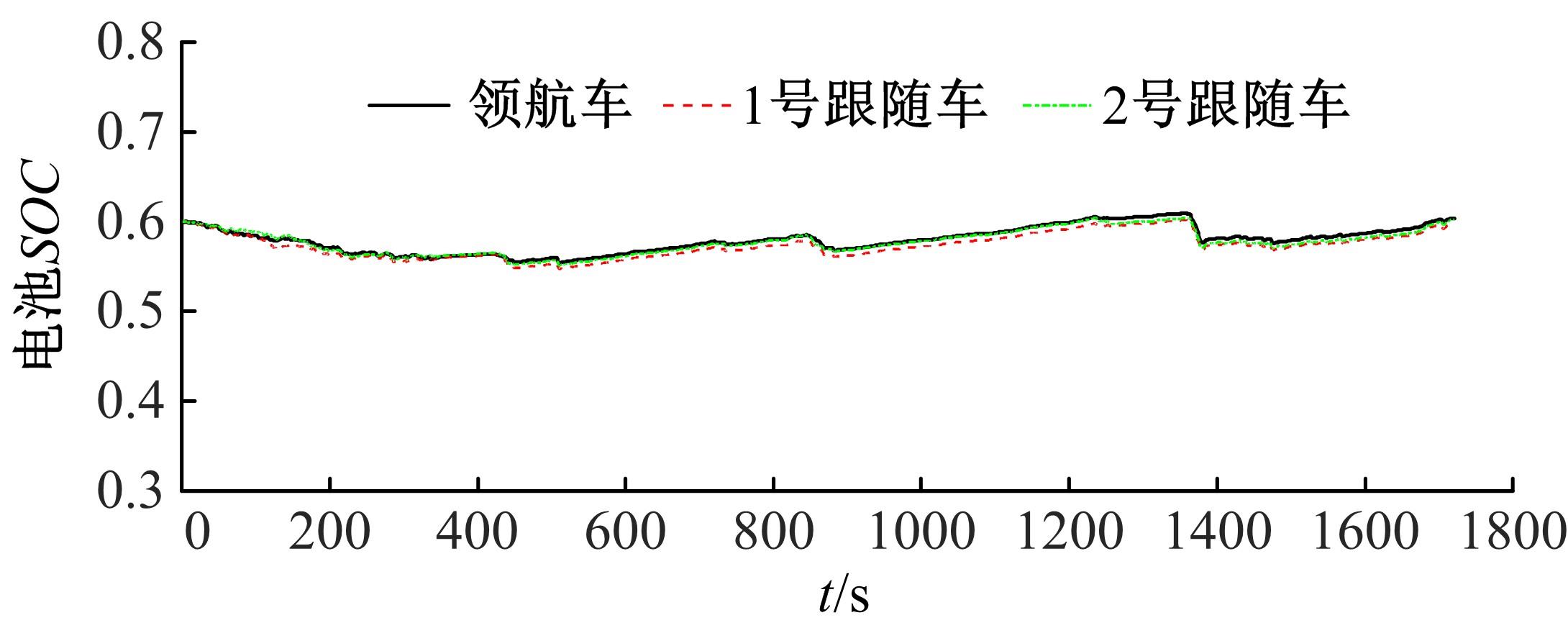
提出一种基于PID与Q-Learning的混合动力汽车队列分层控制策略。上层控制器基于车-车通信获得队列中前车的速度和位置信息,采用PID控制器实现队列的纵向控制并获得后车的目标车速;下层控制器根据该目标车速采用Q-Learning进行混合动力汽车队列的能量管理。仿真结果表明:上层控制队列平均车间距保持在14 m左右,确保良好的行驶安全性;下层控制队列平均百公里油耗比DP策略增加了2.57%,离线计算时间减少了23%。该策略在保持与DP基本相同的燃油经济性下,不仅能适应随机工况,也能在线实现。
中图分类号:
- U461.8











| 1 | Liu J C, Chen Y Z, Zhan J Y, et al. Heuristic dynamic programming based online energy management strategy for plug-in hybrid electric vehicles[J]. IEEE Transactions on Vehicular Technology, 2019, 68(5): 4479-4493. |
| 2 | Xie S, Hu X, Xin Z, et al. Pontryagin's Minimum Principle based model predictive control of energy management for a plug-in hybrid electric bus[J]. Applied Energy, 2019, 236(15): 893-905. |
| 3 | 林歆悠, 冯其高, 张少博. 等效因子离散全局优化的等效燃油瞬时消耗最小策略能量管理策略[J]. 机械工程学报, 2016, 52: 102-110. |
| Lin Xin-you, Feng Qi-gao, Zhang Shao-bo. Energy management strategy of equivalent fuel instantaneous consumption minimization strategy based on discrete global optimization of equivalent factor[J]. Chinese Journal of Mechanical Engineering, 2016, 52: 102-110. | |
| 4 | Zou Y, Liu T, Liu D, et al. Reinforcement learning-based real-time energy management for a hybrid tracked vehicle[J]. Applied Energy, 2016, 171: 372-382. |
| 5 | Li Y F, Chen W B, Peeta S, et al. Platoon control of connected multi-vehicle systems under V2X communications: design and experiments[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(5): 1891-1902. |
| 6 | 魏民祥, 杨佳伟, 陈凯, 等. 基于改进大脑情感学习模型的车辆纵向跟随[J]. 吉林大学学报: 工学版, 2022, 52(12): 2994-3005. |
| Wei Min-xiang, Yang Jia-wei, Chen Kai, et al. Vehicle longitudinal following based on improved brain emotion learning model[J]. Journal of Jilin University (Engineering and Technology Edition), 2022, 52(12): 2994-3005. | |
| 7 | 高振海, 严伟, 李红建, 等. 汽车自适应巡航线性参变间距控制算法[J]. 吉林大学学报: 工学版, 2016, 46(4): 1023-1029. |
| Gao Zhen-hai, Yan Wei, Li Hong-jian, et al. Automobile adaptive cruise linear parameter variable spacing control algorithm[J]. Journal of Jilin University (Engineering and Technology Edition), 2016, 46(4): 1023-1029. | |
| 8 | Qiu L H, Qian L J. Global optimal energy management control strategies for connected four-wheel-drive hybrid electric vehicles[J]. Iet Intelligent Transport Systems, 2017, 11(5): 264-272. |
| 9 | 郭景华, 王班, 王靖瑶, 等. 智能网联混合动力汽车队列模型预测分层控制[J].汽车工程, 2020, 42(10): 1293-1301, 1334. |
| Guo Jing-hua, Wang Ban, Wang Jing-yao,et al.Predictive hierarchical control of queue model for intelligent networked hybrid electric vehicles[J]. Automotive Engineering, 2020, 42(10): 1293-1301, 1334. | |
| 10 | 张东好, 项昌乐, 韩立金, 等. 功率分流混合动力车辆多目标优化分层控制方法[J]. 吉林大学学报: 工学版, 2016, 46(2): 373-382. |
| Zhang Dong-hao, Xiang Chang-le, Han Li-jin,et al. Multi-objective optimization hierarchical control method for power split hybrid electric vehicles[J]. Journal of Jilin University(Engineering and Technology Edition), 2016, 46(2): 373-382. | |
| 11 | Qiu S, Qiu L, Qian L J, et al. Hierarchical energy management control strategies for connected hybrid electric vehicles considering efficiencies feedback[J]. Simulation Modelling Practice and Theory, 2018, 90: 1-15. |
| 12 | Ye X, Lai F, Huo Z. Energy management strategy design and simulation validation of hybrid electric vehicle driving in an intelligent fleet[J]. Electronics, 2019, 8(12): 8121516. |
| [1] | 陈磊,王杨,董志圣,宋亚奇. 一种基于转向意图的车辆敏捷性控制策略[J]. 吉林大学学报(工学版), 2023, 53(5): 1257-1263. |
| [2] | 陈鑫,张冠宸,赵康明,王佳宁,杨立飞,司徒德蓉. 搭接焊缝对铝合金焊接结构轻量化设计的影响[J]. 吉林大学学报(工学版), 2023, 53(5): 1282-1288. |
| [3] | 张勇,毛凤朝,刘水长,王青妤,潘神功,曾广胜. 基于Laplacian算法的汽车外流场畸变网格优化[J]. 吉林大学学报(工学版), 2023, 53(5): 1289-1296. |
| [4] | 汪少华,储堃,施德华,殷春芳,李春. 基于有限时间扩张状态观测的HEV鲁棒复合协调控制[J]. 吉林大学学报(工学版), 2023, 53(5): 1272-1281. |
| [5] | 于贵申,陈鑫,武子涛,陈轶雄,张冠宸. AA6061⁃T6铝薄板无针搅拌摩擦点焊接头结构及性能分析[J]. 吉林大学学报(工学版), 2023, 53(5): 1338-1344. |
| [6] | 田彦涛,黄兴,卢辉遒,王凯歌,许富强. 基于注意力与深度交互的周车多模态行为轨迹预测[J]. 吉林大学学报(工学版), 2023, 53(5): 1474-1480. |
| [7] | 杨红波,史文库,陈志勇,郭年程,赵燕燕. 基于NSGA⁃II的斜齿轮宏观参数多目标优化[J]. 吉林大学学报(工学版), 2023, 53(4): 1007-1018. |
| [8] | 赵睿,李云,胡宏宇,高镇海. 基于V2I通信的交叉口车辆碰撞预警方法[J]. 吉林大学学报(工学版), 2023, 53(4): 1019-1029. |
| [9] | 陈小波,陈玲. 定位噪声统计特性未知的变分贝叶斯协同目标跟踪[J]. 吉林大学学报(工学版), 2023, 53(4): 1030-1039. |
| [10] | 田彦涛,季言实,唱寰,谢波. 深度强化学习智能驾驶汽车增广决策模型[J]. 吉林大学学报(工学版), 2023, 53(3): 682-692. |
| [11] | 何德峰,周丹,罗捷. 跟随式车辆队列高效协同弦稳定预测控制[J]. 吉林大学学报(工学版), 2023, 53(3): 726-734. |
| [12] | 张建,刘金波,高原,刘梦可,高振海,杨彬. 基于多模交互的车载传感器定位算法[J]. 吉林大学学报(工学版), 2023, 53(3): 772-780. |
| [13] | 何科,丁海涛,赖宣淇,许男,郭孔辉. 基于Transformer的轮式里程计误差预测模型[J]. 吉林大学学报(工学版), 2023, 53(3): 653-662. |
| [14] | 刘嫣然,孟庆瑜,郭洪艳,李嘉霖. 图注意力模式下融合高精地图的周车轨迹预测[J]. 吉林大学学报(工学版), 2023, 53(3): 792-801. |
| [15] | 谢波,高榕,许富强,田彦涛. 低附着路况条件下人车共享转向系统稳定控制[J]. 吉林大学学报(工学版), 2023, 53(3): 713-725. |
|
||