吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (1): 175-184.doi: 10.13229/j.cnki.jdxbgxb.20230325
• 交通运输工程·土木工程 • 上一篇
基于双目视觉的道路水深在线检测算法
王军年1( ),曹宇靖1,罗智仁1,李凯旋1,赵文伯1,孟盈邑2
),曹宇靖1,罗智仁1,李凯旋1,赵文伯1,孟盈邑2
- 1.吉林大学 汽车底盘集成与仿生全国重点实验室,长春 130022
2.吉林大学 地下水资源与环境教育部重点实验室,长春 130012
Online detection algorithm of road water depth based on binocular vision
Jun-nian WANG1(),Yu-jing CAO1,Zhi-ren LUO1,Kai-xuan LI1,Wen-bo ZHAO1,Ying-yi MENG2
- 1.National Key Laboratory of Automotive Chassis Integration and Bionics,Jilin University,Changchun 130022,China
2.Key Lab of Groundwater Resources and Environment Ministry of Education,Jilin University,Changchun 130012,China
摘要:
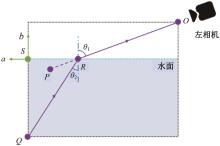
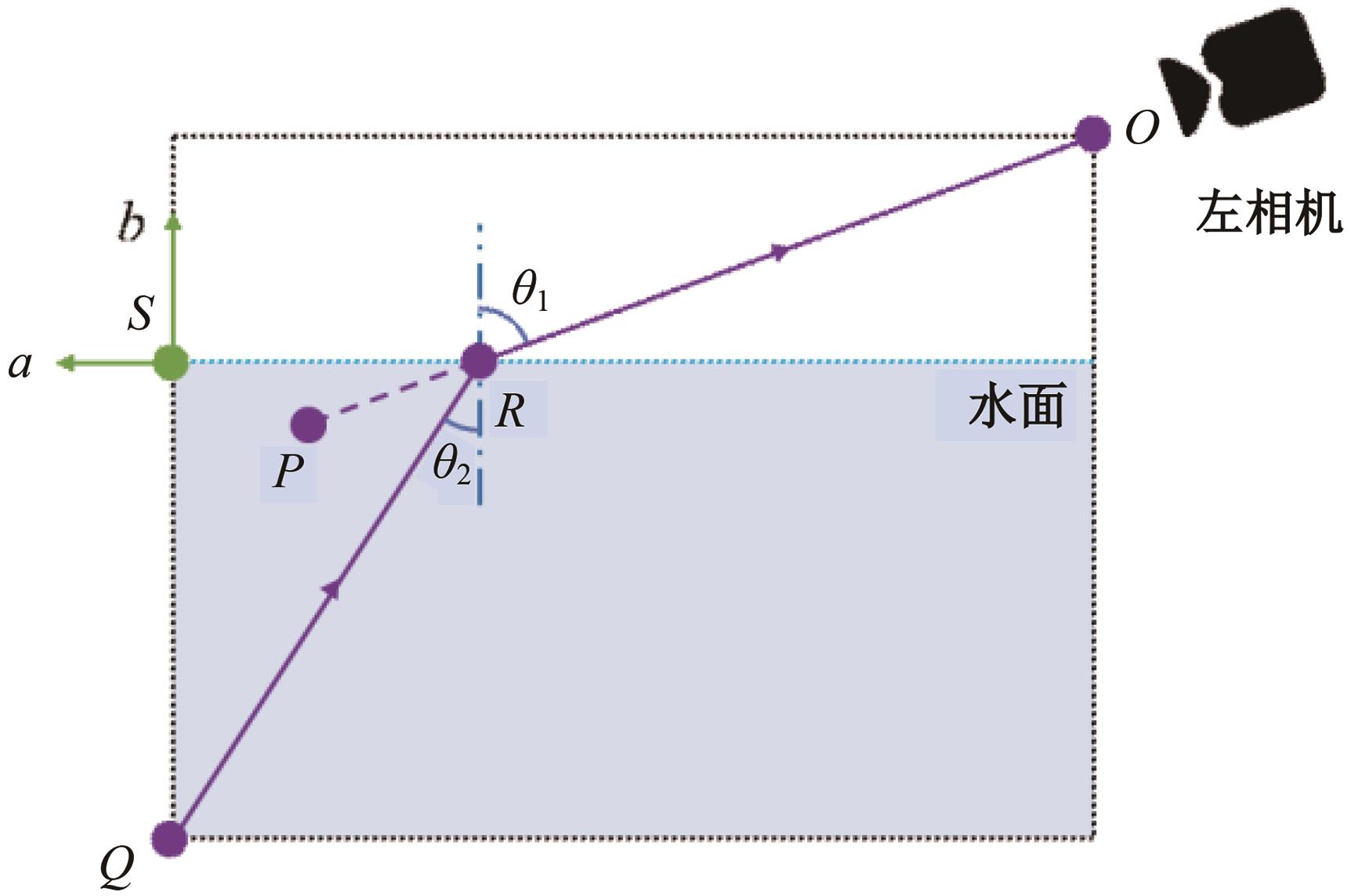
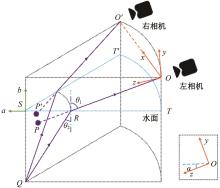
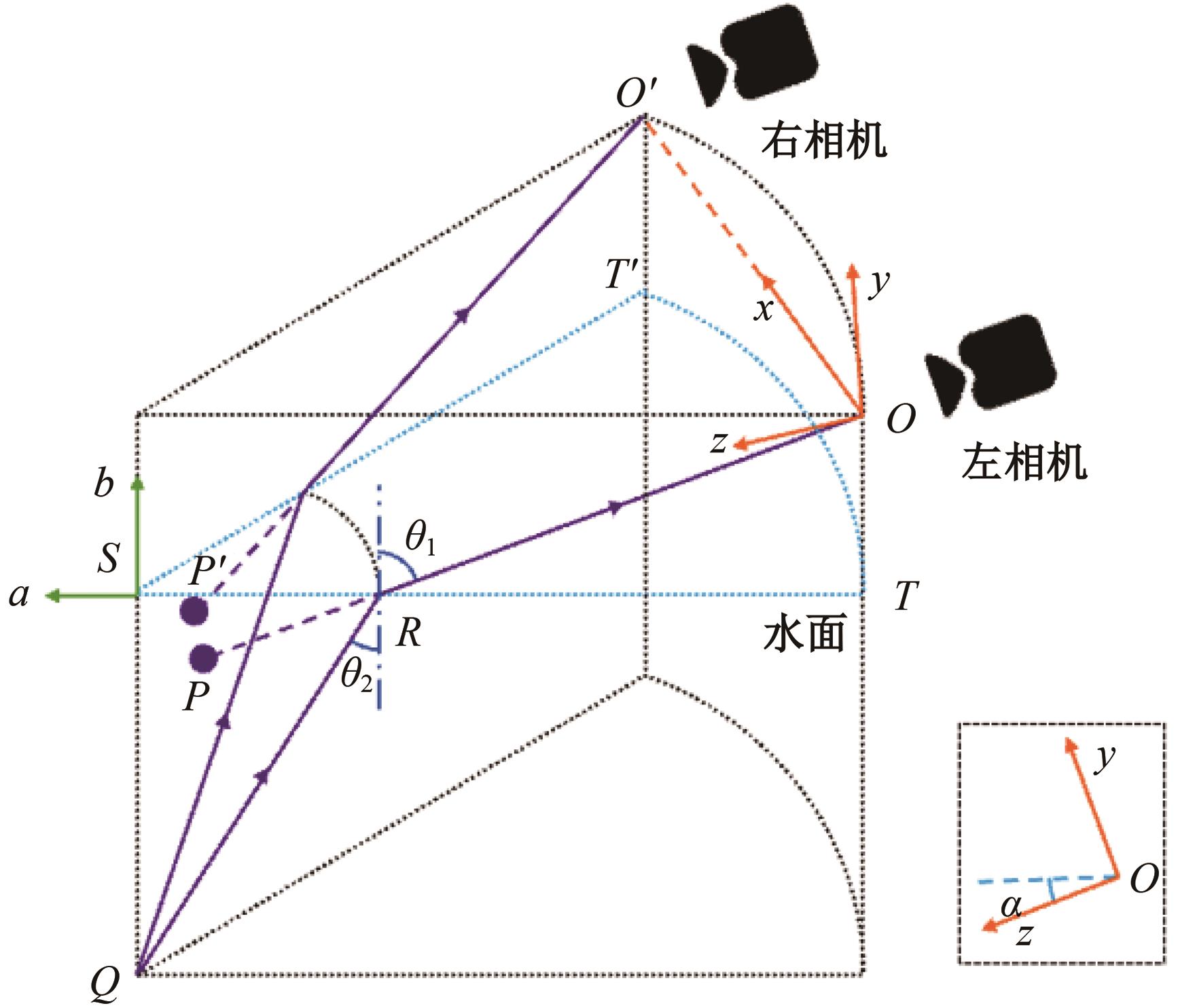
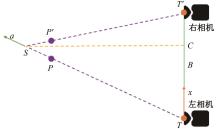
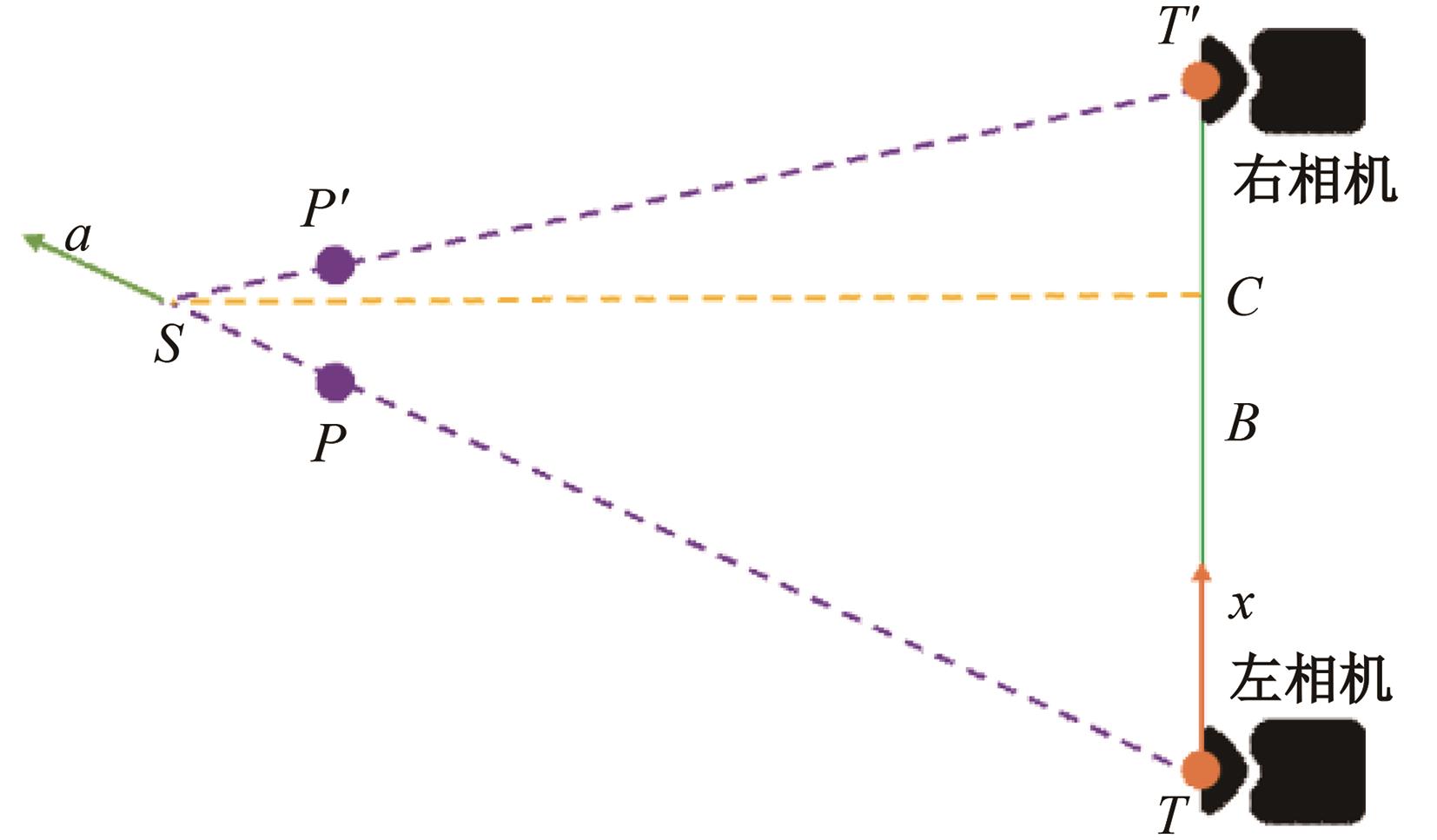
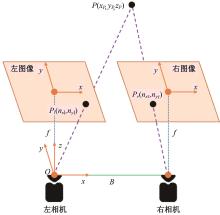
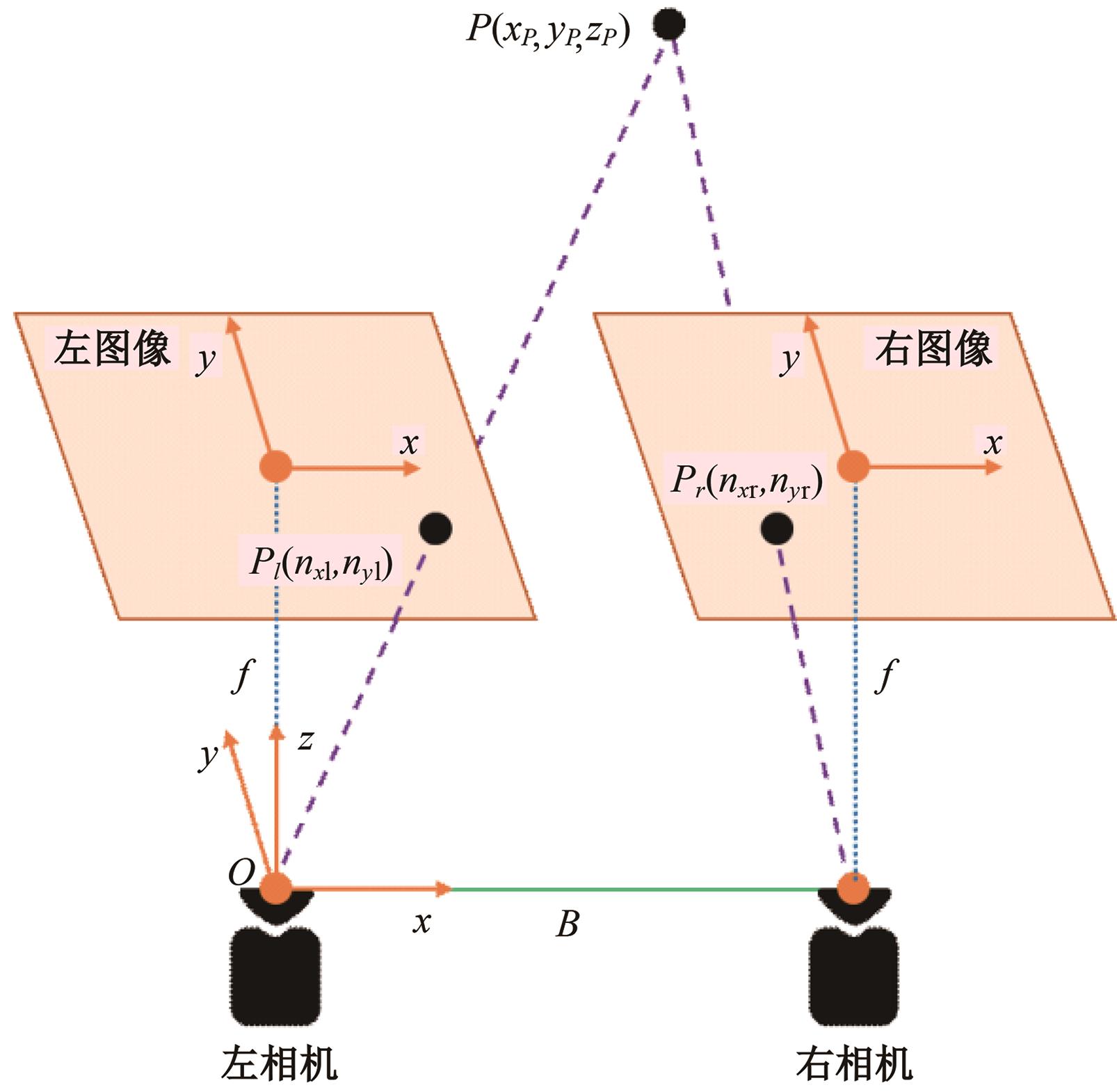
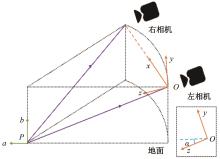
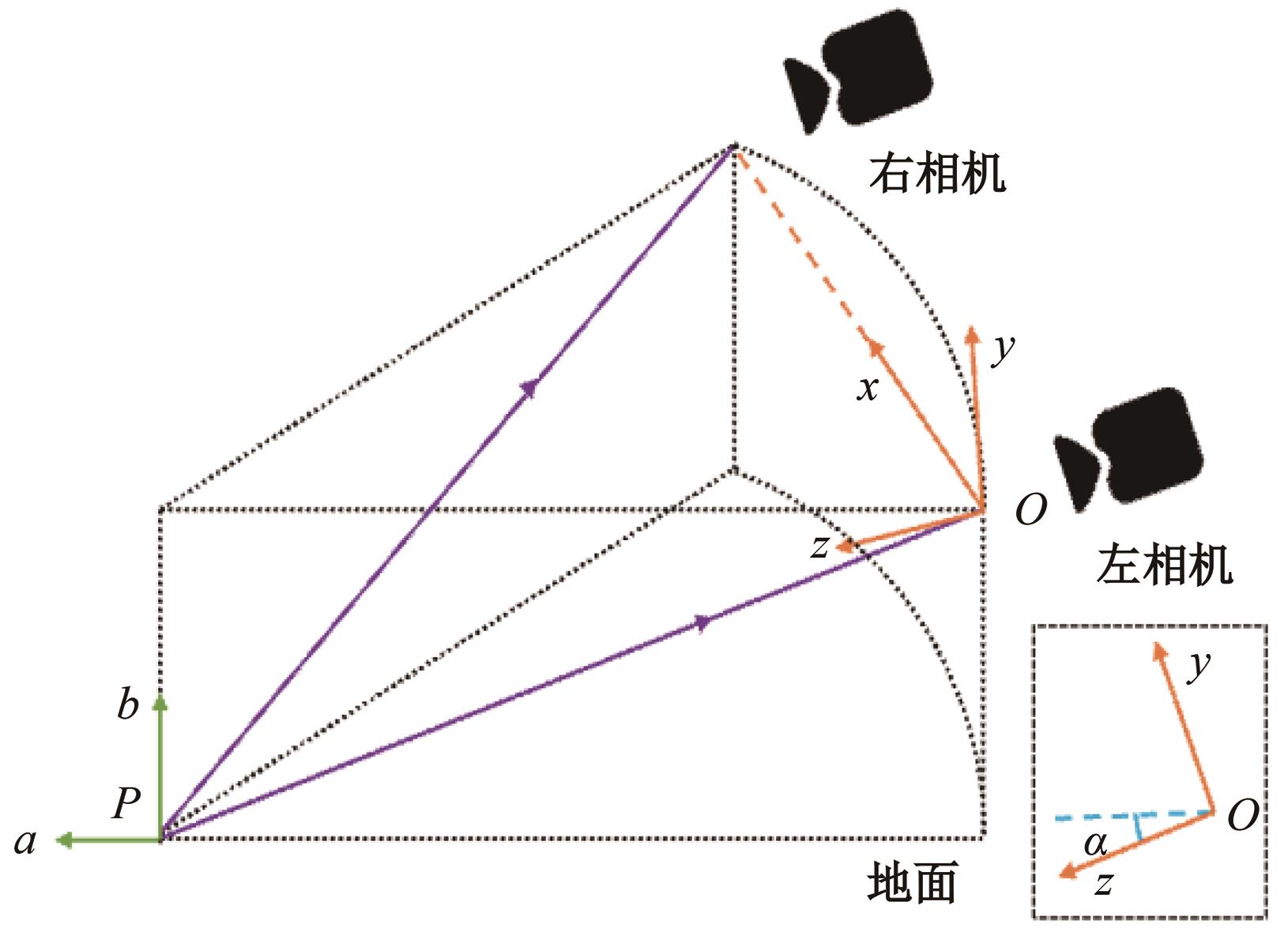
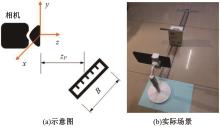
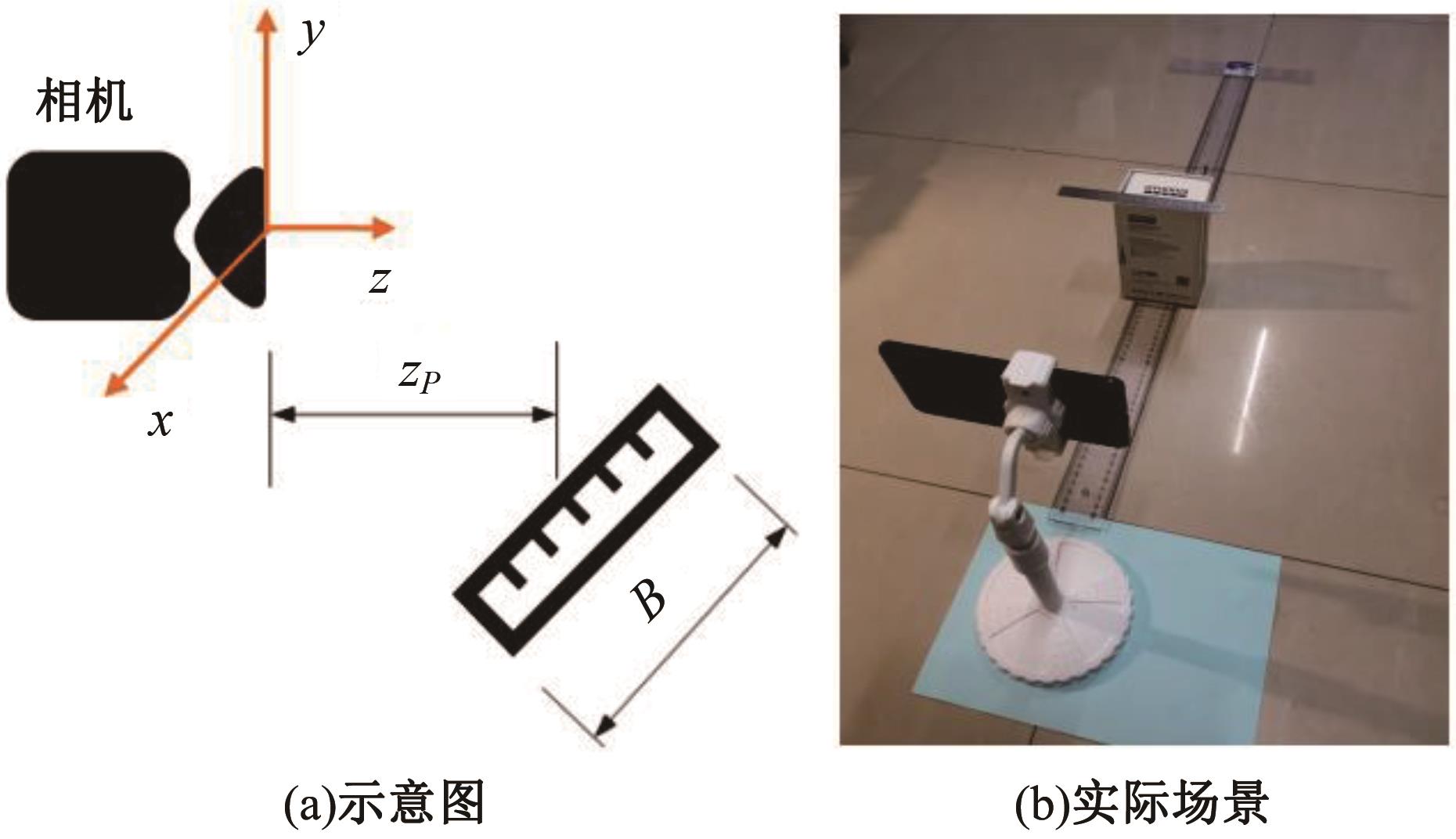
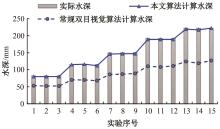
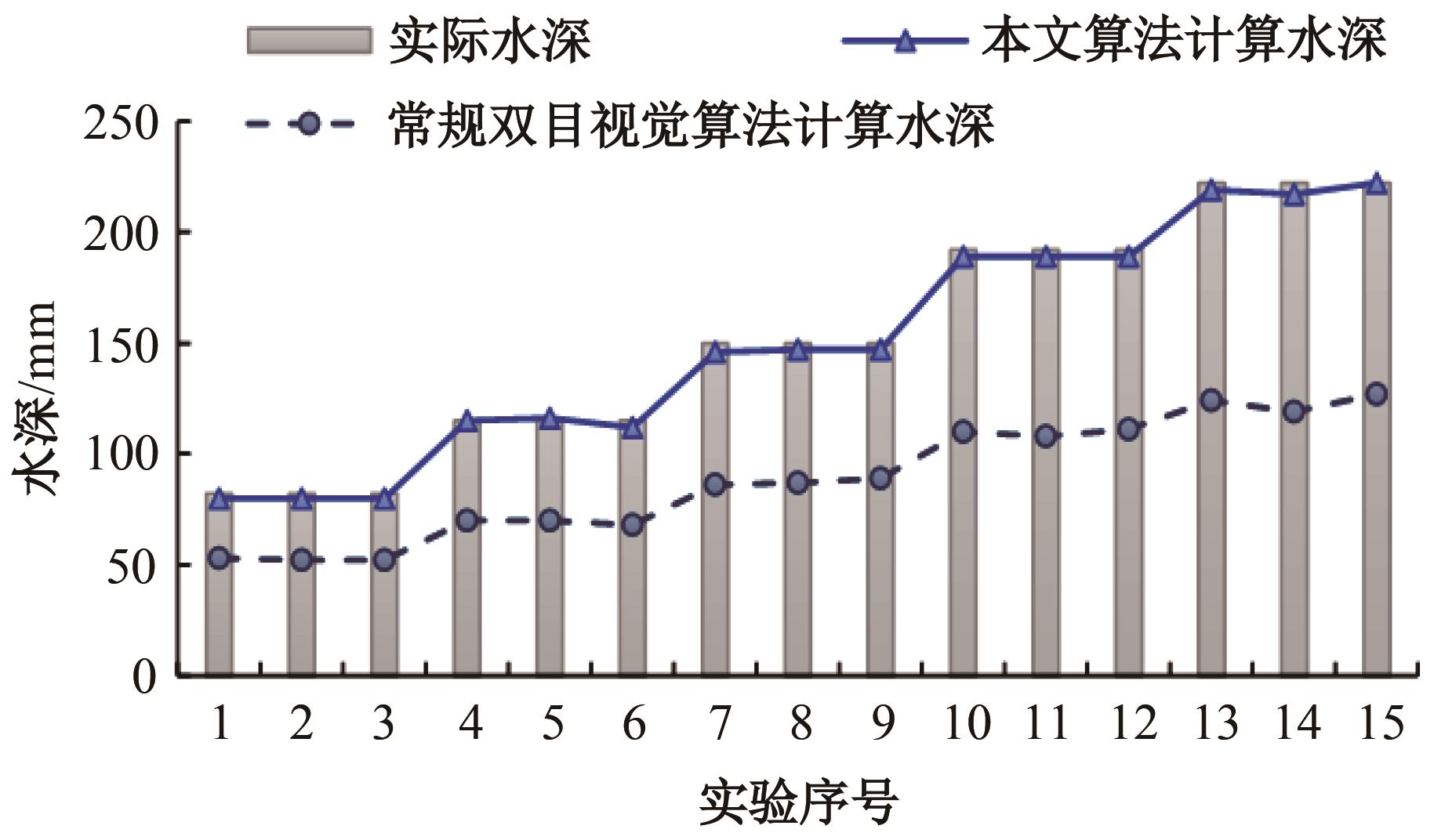
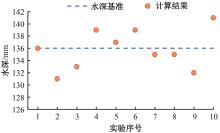
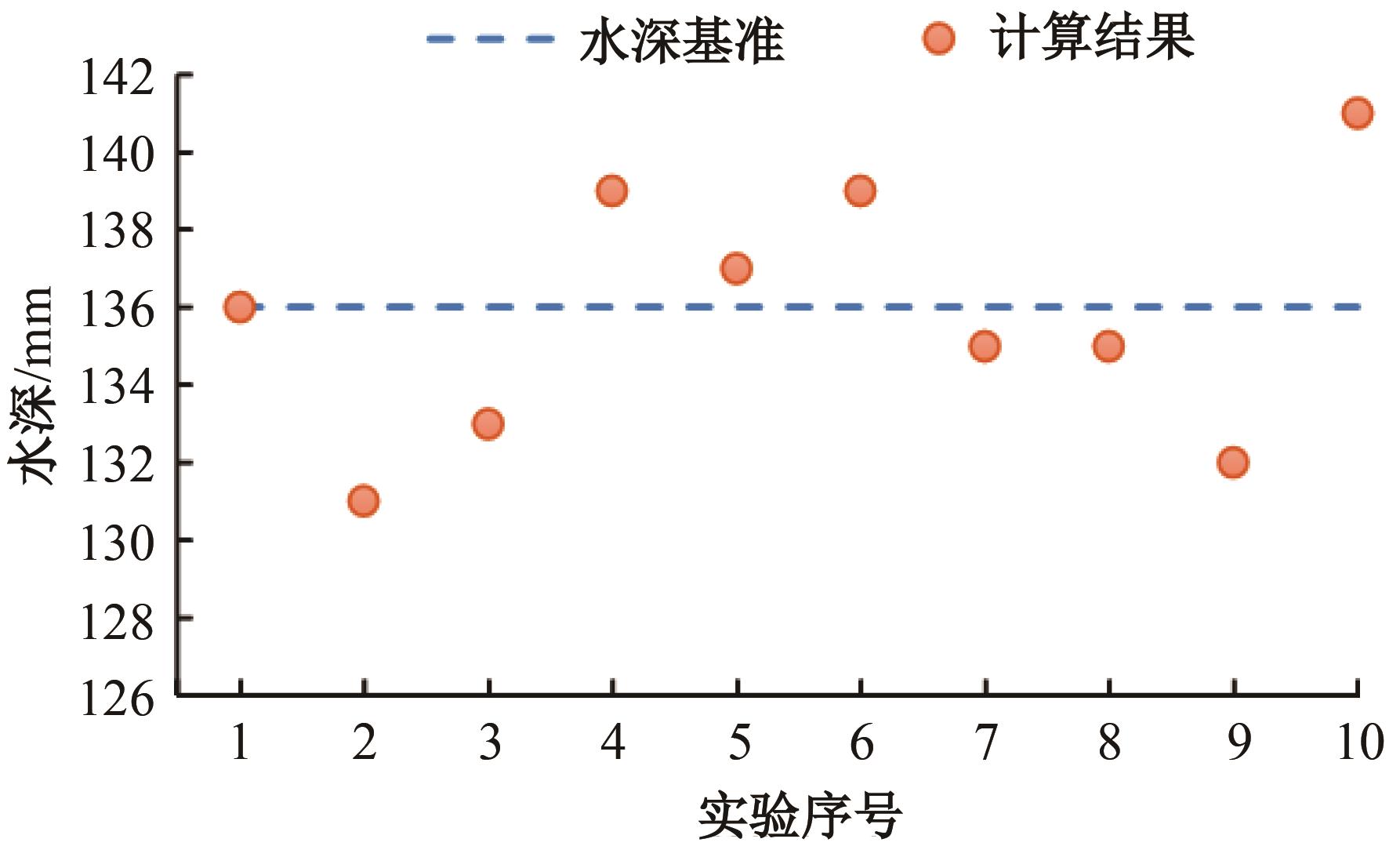
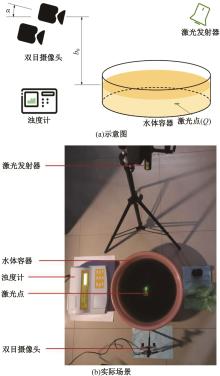
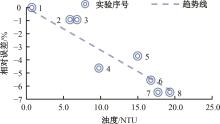
涉水驾驶会给驾驶员及乘客的生命财产安全带来风险,为提高涉水驾驶的安全性,本文采用双目视觉与激光投射相结合的技术方案,基于水下虚像的成像规律,提出一种用于前方水深计算的双目视觉算法,该算法仅需自车传感器采集的数据。为验证本文算法的有效性,进行实验验证,结果表明:理想情况下,本文算法计算结果的相对误差在3%以内,面对实际场景时,求平均值、滤波的方法可以减小水面波动的影响,浑浊水体引入的相对误差最大约7%,这证明本文算法具有较好的准确性和鲁棒性,可以为驾驶员提供前方水深信息,辅助驾驶员判断路况。
中图分类号:
- U471.15
| 1 | Yamaguchi K. Trends in extreme weather events induced by global climate change[J]. Electrical Engineering in Japan, 2021, 214(2): No.23306. |
| 2 | 任宏昌, 张恒德. 郑州“7·20”暴雨的精细化特征及主要成因分析[J]. 河海大学学报:自然科学版, 2022, 50(5): 1-9. |
| Ren Hong-chang, Zhang Heng-de. Refined features and main causes of "7·20" rainstorm in Zhengzhou[J]. Journal of Hohai University (Natural Sciences), 2022, 50(5): 1-9. | |
| 3 | Zheng X, Su D H. Analysis and research on vehicle wading performance[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2021, 235(1): 3-15. |
| 4 | Khapane P, Chavan V, Ganeshwade U. Water ingress analysis and splash protection evaluation for vehicle wading using non-classical CFD simulation[J]. SAE International Journal of Passenger Cars - Mechanical Systems, 2017, 10(1): 183-194. |
| 5 | 黄晓明, 曹青青, 刘修宇, 等. 基于路表分形摩擦理论的整车雨天制动性能模拟[J]. 吉林大学学报:工学版, 2019, 49(3): 757-765. |
| Huang Xiao-ming, Cao Qing-qing, Liu Xiu-yu, et al. Simulation of vehicle braking performance on rainy days based on pavement surface fractal friction theory[J]. Journal of Jilin University (Engineering and Technology Edition), 2019, 49(3): 757-765. | |
| 6 | Spitzhüttl F, Goizet F, Unger T, et al. The real impact of full hydroplaning on driving safety[J]. Accident Analysis & Prevention, 2020, 138:No. 105458. |
| 7 | Varshney M, Ballani A, Pasunurthi S, et al. Transient, 3D CFD, moving mesh simulation of vehicle water wading in a water tunnel with inclined entry-exit[C]∥WCX SAE World Congress Experience, Online,2022: 2022-01-0768. |
| 8 | Varshney M, Pasunurthi S S, Maiti D, et al. CFD method development for simulating water fording for a passenger car[C]∥SAE WCX Digital Summit, Online,2021: 2021-01-0205. |
| 9 | Zhu H, Song R. Underwater image enhancement for automotive wading[C]∥The 13th International Conference on Computer and Automation Engineering (ICCAE), Melbourne, Australia, 2021: 5-9. |
| 10 | Bystrov A, Hoare E, Gashinova M, et al. Underwater optical imaging for automotive wading[J]. Sensors, 2018, 18(12):No. 4476. |
| 11 | J·夏普. 用于确定和显示涉水状况的方法和系统及具有该系统的车辆[P]. 中国: CN201910700255.1, 2020-02-28. |
| 12 | 朱文强, 曹怡然. 用于车辆的涉水状态显示方法[P]. 中国: CN201910099467.9, 2022-03-29. |
| 13 | 栾清华, 秦志宇, 王东, 等. 城市暴雨道路积水监测技术及其应用进展[J]. 水资源保护, 2022, 38(1): 106-116, 140. |
| Luan Qing-hua, Qin Zhi-yu, Wang Dong, et al. Review on monitoring technology of urban road waterlogging after rainstorm and its application[J]. Water Resources Protection, 2022, 38(1): 106-116, 140. | |
| 14 | 李纪玄, 李琦, 安胜伟. 车辆涉水探测方法、系统及车辆[P]. 中国: CN201710400538.5, 2021-06-11. |
| 15 | 罗金亮, 廖国红, 李明. 路面水深检测方法、装置及车辆[P]. 中国: CN201610958066.0, 2021-08-10. |
| 16 | 高鲁涛. 一种积水深度确定方法及装置[P]. 中国: CN202180000406.8, 2021-07-23. |
| 17 | 唐帅. 用于车辆的水深检测系统和方法[P]. 中国: CN201710169691.1, 2021-01-08. |
| 18 | 王军年, 曹宇靖, 赵文伯, 等. 一种道路积水车载在线监测与驾驶辅助系统及方法[P]. 中国: CN202110281787.3, 2022-09-02. |
| 19 | 夏清华, 屈少华. 水中物体的视深度[J]. 物理通报, 1999(1): 13-14. |
| Xia Qing-hua, Qu Shao-hua. Apparent depth of objects in water[J]. Physics Bulletin, 1999(1): 13-14. | |
| 20 | 耿英楠. 立体匹配技术的研究[D]. 长春: 吉林大学通信工程学院, 2014. |
| Geng Ying-nan. Research on stereo matching algorithms[D]. Changchun: College of Communication Engineering, Jilin University, 2014. |
| [1] | 李寿涛,杨路,屈如意,孙鹏鹏,于丁力. 基于模型预测控制的滑移率控制方法[J]. 吉林大学学报(工学版), 2024, 54(9): 2687-2696. |
| [2] | 吴量,顾义凡,邢彪,马芳武,倪利伟,贾微微. 基于线性二次型调节器的四轮转向与分布式集成控制方法[J]. 吉林大学学报(工学版), 2024, 54(9): 2414-2422. |
| [3] | 王玉海,李晓之,李兴坤. 面向高速工况的混合动力卡车预见性节能算法[J]. 吉林大学学报(工学版), 2024, 54(8): 2121-2129. |
| [4] | 常胜,刘宏飞,邹乃威. 汽车变曲率路径循迹H∞回路成形鲁棒控制[J]. 吉林大学学报(工学版), 2024, 54(8): 2141-2148. |
| [5] | 刘建泽,柳江,李敏,章新杰. 基于最小二乘的车速解耦路面辨识方法[J]. 吉林大学学报(工学版), 2024, 54(7): 1821-1830. |
| [6] | 谢宪毅,张明君,金立生,周彬,胡涛,白宇飞. 考虑舒适度的智能汽车人工蜂群轨迹规划方法[J]. 吉林大学学报(工学版), 2024, 54(6): 1570-1581. |
| [7] | 刘从臻,陈高,刘洪柱,马强,徐成伟,孟辉,王国林. 湿滑路面轮胎接地力学特性模型[J]. 吉林大学学报(工学版), 2024, 54(6): 1501-1511. |
| [8] | 黄玲,崔躜,游峰,洪佩鑫,钟浩川,曾译萱. 适用于多车交互场景的车辆轨迹预测模型[J]. 吉林大学学报(工学版), 2024, 54(5): 1188-1195. |
| [9] | 张自超,陈建. 基于双目仿鹰眼视觉与超分辨的果园三维点云重建[J]. 吉林大学学报(工学版), 2024, 54(5): 1469-1481. |
| [10] | 郭洪艳,王连冰,赵旭,戴启坤. 考虑侧向运动的整车质量与道路坡度估计[J]. 吉林大学学报(工学版), 2024, 54(5): 1175-1187. |
| [11] | 陆玉凯,袁帅科,熊树生,朱绍鹏,张宁. 汽车漆面缺陷高精度检测系统[J]. 吉林大学学报(工学版), 2024, 54(5): 1205-1213. |
| [12] | 汪少华,张启睿,施德华,殷春芳,李春. 双行星排式混合动力传动系统非线性振动响应特性分析[J]. 吉林大学学报(工学版), 2024, 54(4): 890-901. |
| [13] | 高镇海,蔡荣贵,孙天骏,于桐,赵浩源,班浩. 人机共驾下的驾驶行为数据滤波方法[J]. 吉林大学学报(工学版), 2024, 54(3): 589-599. |
| [14] | 谢宪毅,王禹涵,金立生,赵鑫,郭柏苍,廖亚萍,周彬,李克强. 基于改变控制时域时间步长的智能车轨迹跟踪控制[J]. 吉林大学学报(工学版), 2024, 54(3): 620-630. |
| [15] | 邓小林,杨馥模,覃善甘. 新型仿竹六边形梯度层级多胞管耐撞性对比分析[J]. 吉林大学学报(工学版), 2024, 54(2): 333-345. |
|
||