吉林大学学报(工学版) ›› 2021, Vol. 51 ›› Issue (1): 134-138.doi: 10.13229/j.cnki.jdxbgxb20190957
• 车辆工程·机械工程 • 上一篇
基于惯性测量单元/轮速融合的车辆零速检测方法
熊璐1,2( ),魏琰超1,2,高乐天1,2
),魏琰超1,2,高乐天1,2
- 1.同济大学 汽车学院,上海 201804
2.同济大学 新能源汽车工程中心,上海 201804
Inertial measurement unit/wheel speed sensor integrated zero-speed detection
Lu XIONG1,2(),Yan-chao WEI1,2,Le-tian GAO1,2
- 1.School of Automotive Studies,Tongji University,Shanghai 201804,China
2.Clean Energy Automotive Engineering Center,Tongji University,Shanghai 201804,China
摘要:
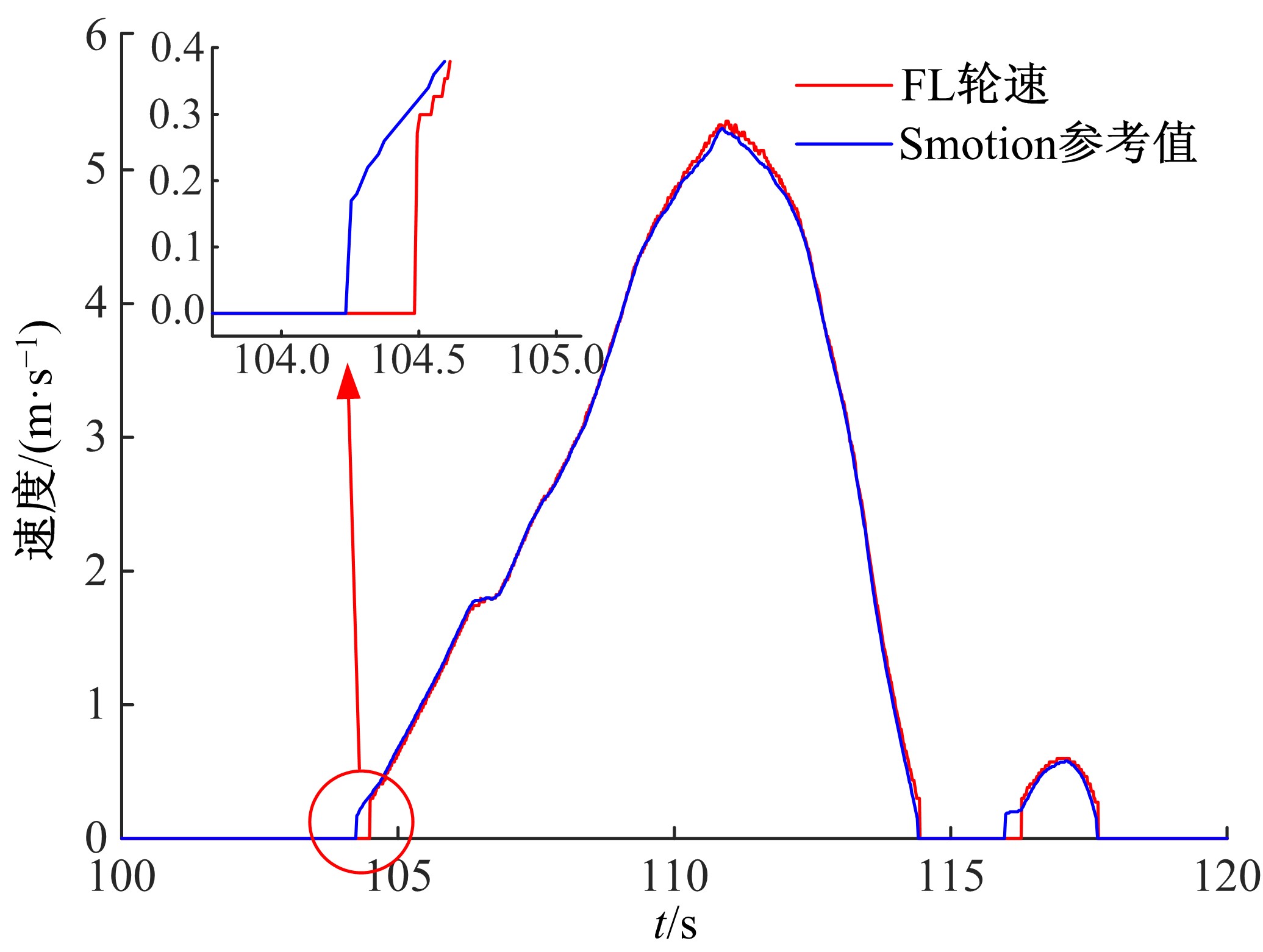
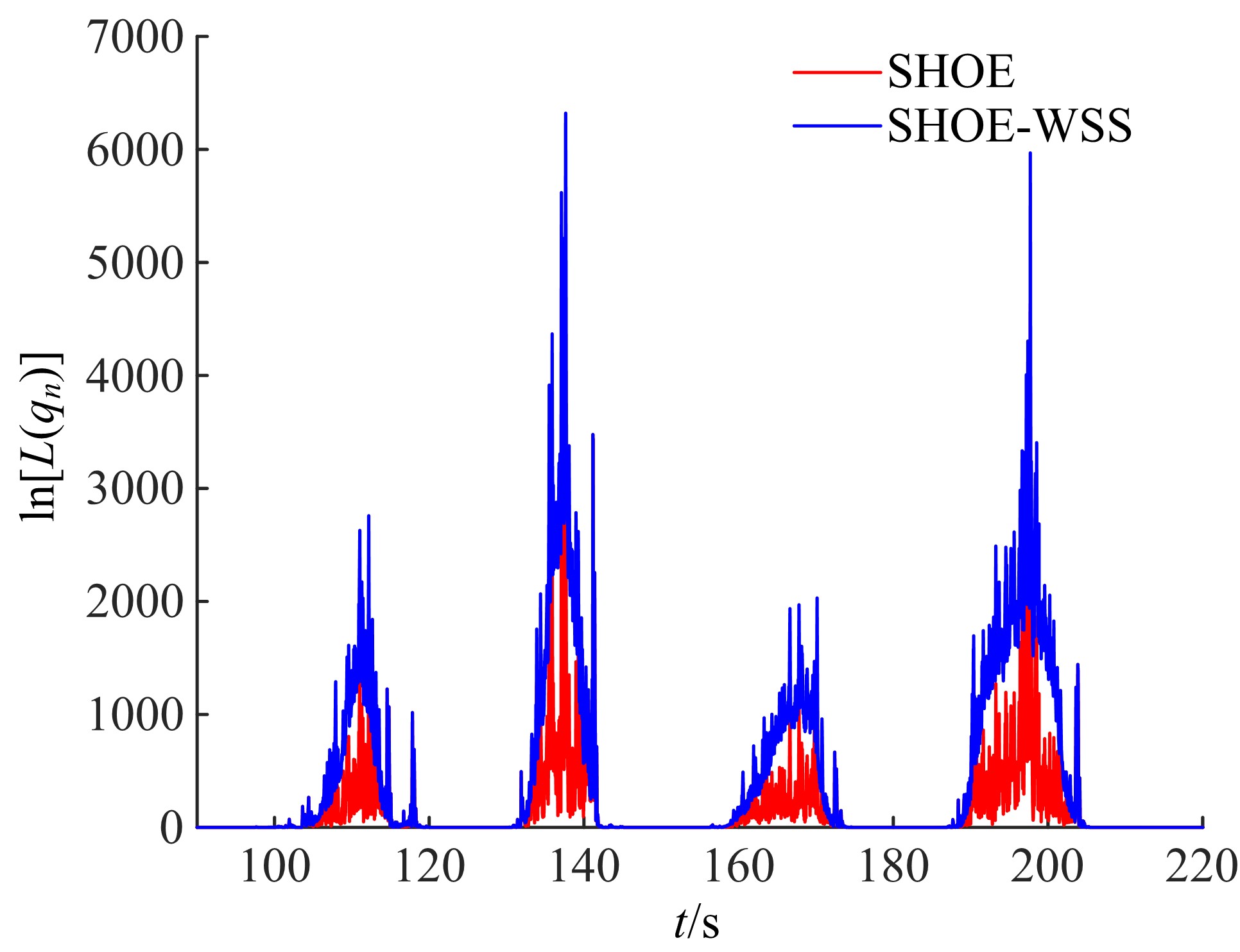
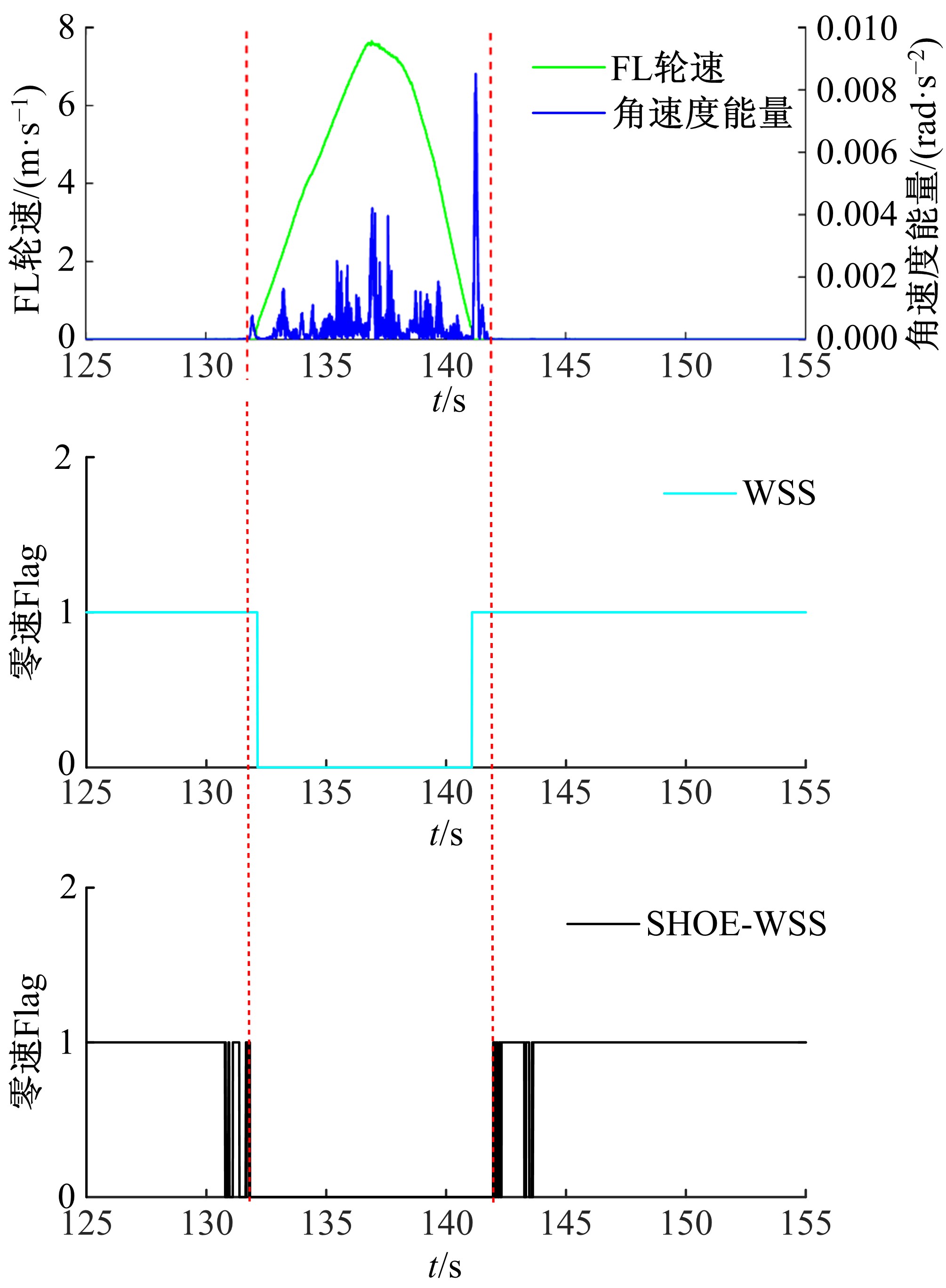
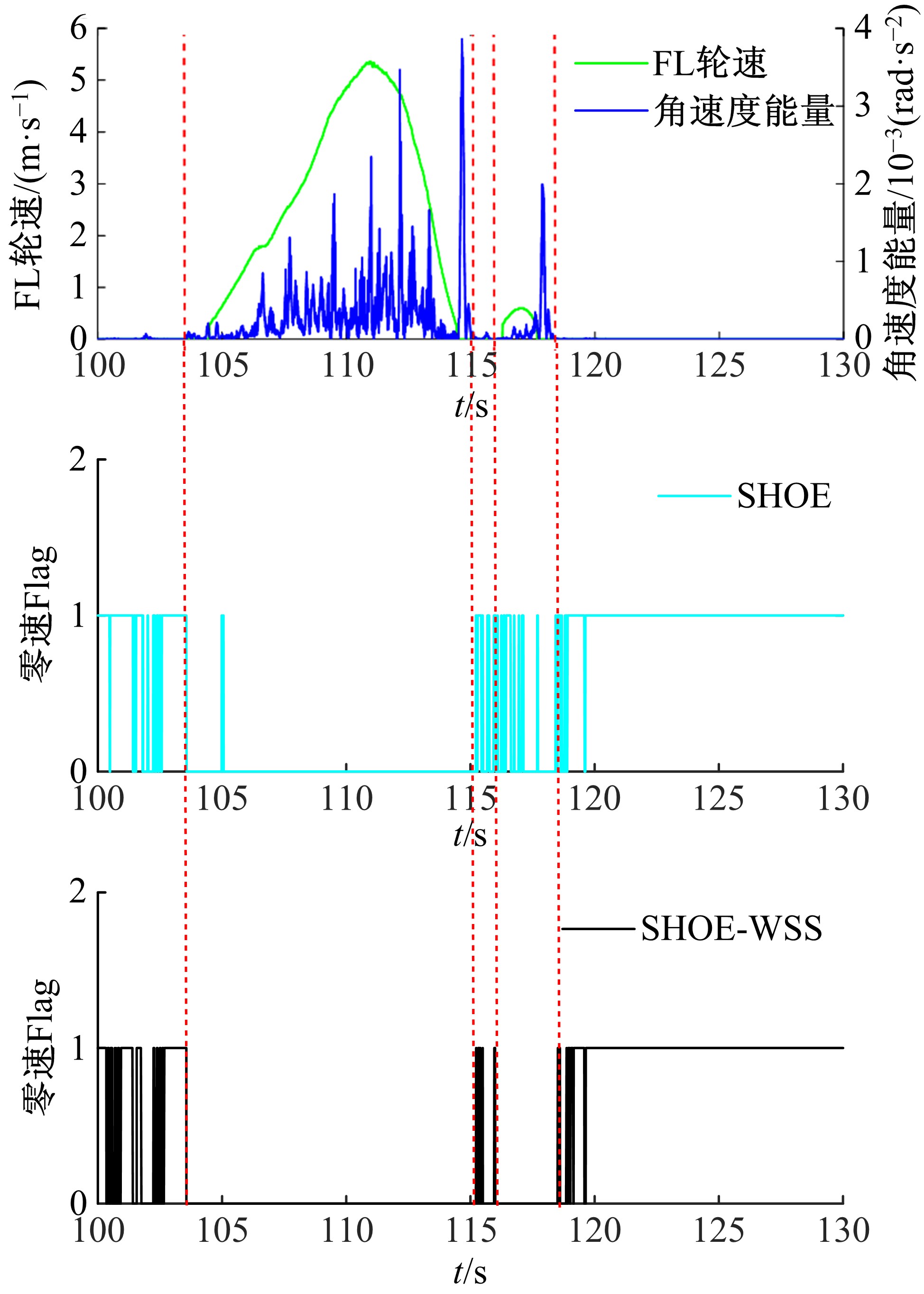
仅依赖惯性测量单元 (IMU)的零速检测器存在动态中零速误判的情况,从而导致误修正等问题。为在车载组合导航中解决上述问题,提出了基于广义似然比检验的IMU/轮速融合零速检测方法,并进行了试验验证。试验结果表明,相比于仅依赖IMU的零速检测器或仅依赖轮速的零速检测器,基于IMU/轮速融合的零速检测器减少了动态中的误判情况,提升了零速检测的准确性。
中图分类号:
- U463.6





| 1 | El-Sheimy N, Niu X. The promise of MEMS to the navigation community[J]. Inside GNSS, 2007, 2(2): 46-56. |
| 2 | Skog I, Handel P. In-car positioning and navigation technologies—a survey[J]. IEEE Transactions on Intelligent Transportation Systems, 2009, 10(1): 4-21. |
| 3 | Roetenberg D, Slycke P J, Veltink P H. Ambulatory position and orientation tracking fusing magnetic and inertial sensing[J]. IEEE Transactions on Biomedical Engineering, 2007, 54(5): 883-890. |
| 4 | 宋宇, 朱锋, 卢立果, 等. 车载 GNSS/SINS 组合导航中零速区间探测方法的改进[J]. 测绘地理信息, 2016, 41(6): 12-16. |
| Song Yu, Zhu Feng, Lu Li-guo, et al. Improvement of zero velocity detection method in vehicle GNSS/SINS integrated navigation[J]. Journal of Geomatics, 2016, 41(6): 12-16. | |
| 5 | 格鲁夫. GNSS与惯性及多传感器组合导航系统原理[M]. 北京:国防工业出版社, 2015. |
| 6 | Godha S, Lachapelle G. Foot mounted inertial system for pedestrian navigation[J]. Measurement Science and Technology, 2008, 19(7): 075202. |
| 7 | Veltink P H, Bussmann H B J, de Vries W, et al. Detection of static and dynamic activities using uniaxial accelerometers[J]. IEEE Transactions on Rehabilitation Engineering, 1996, 4(4): 375-385. |
| 8 | Godha S, Lachapelle G, Cannon M E. Integrated GPS/INS system for pedestrian navigation in a signal degraded environment[C]∥ION GNSS, Fort Worth TX, St. Louis, Missouri, 2006: 1-14. |
| 9 | Skog I, Handel P, Nilsson J O, et al. Zero-velocity detection—an algorithm evaluation[J]. IEEE Transactions on Biomedical Engineering, 2010, 57(11): 2657-2666. |
| 10 | Ma M, Song Q, Gu Y, et al. An adaptive zero velocity detection algorithm based on multi-sensor fusion for a pedestrian navigation system[J]. Sensors, 2018, 18(10): 1-16. |
| 11 | Carlson C R, Gerdes J C, Powell J D. Error sources when land vehicle dead reckoning with differential wheel speeds[J]. Navigation, 2004, 51(1):13-27. |
| [1] | 马芳武,梁鸿宇,王强,蒲永锋. 双材料负泊松比结构的面内冲击动力学性能[J]. 吉林大学学报(工学版), 2021, 51(1): 114-121. |
| [2] | 杜常清,曹锡良,何彪,任卫群. 基于混合粒子群算法的双离合变速器参数优化设计[J]. 吉林大学学报(工学版), 2020, 50(5): 1556-1564. |
| [3] | 李静,石求军,洪良,刘鹏. 基于车辆状态估计的商用车ESC神经网络滑模控制[J]. 吉林大学学报(工学版), 2020, 50(5): 1545-1555. |
| [4] | 高菲,肖阳,张文华,祁锦轩,李子樵,马骁远. 高温和荷电状态对锂离子电池单体力学响应的耦合影响[J]. 吉林大学学报(工学版), 2020, 50(5): 1574-1583. |
| [5] | 陈吉清,蓝庆生,兰凤崇,刘照麟. 基于轮胎力预判与拟合的轨迹跟踪控制[J]. 吉林大学学报(工学版), 2020, 50(5): 1565-1573. |
| [6] | 杨志刚,范亚军,夏超,储世俊,单希壮. 基于双稳态尾迹的方背Ahmed模型减阻[J]. 吉林大学学报(工学版), 2020, 50(5): 1635-1644. |
| [7] | 沈哲,王毅刚,杨志刚,贺银芝. 风洞中未知声源漂移误差的逼近修正[J]. 吉林大学学报(工学版), 2020, 50(5): 1584-1589. |
| [8] | 刘钊,程江琳,朱玉田,郑立辉. 轨道车辆垂向振动建模及运动关联分析[J]. 吉林大学学报(工学版), 2020, 50(5): 1600-1607. |
| [9] | 李小雨,许男,仇韬,郭孔辉. 各向异性刚度对轮胎力学特性及车辆操纵性的影响[J]. 吉林大学学报(工学版), 2020, 50(2): 389-398. |
| [10] | 陈鑫,王宁,沈传亮,冯晓,杨昌海. 后视镜造型对前侧窗气动噪声的影响[J]. 吉林大学学报(工学版), 2020, 50(2): 426-436. |
| [11] | 李银平,靳添絮,刘立. 纯电动铲运机弓网续能系统设计与动态特性仿真[J]. 吉林大学学报(工学版), 2020, 50(2): 454-463. |
| [12] | 赖晨光,王擎宇,胡博,文凯平,陈彦宇. 静气动弹性影响下带小翼汽车尾翼的设计与优化[J]. 吉林大学学报(工学版), 2020, 50(2): 399-407. |
| [13] | 叶辉,刘畅,闫康康. 纤维增强复合材料在汽车覆盖件中的应用[J]. 吉林大学学报(工学版), 2020, 50(2): 417-425. |
| [14] | 马芳武,梁鸿宇,赵颖,杨猛,蒲永锋. 内凹三角形负泊松比结构耐撞性多目标优化设计[J]. 吉林大学学报(工学版), 2020, 50(1): 29-35. |
| [15] | 郭孔辉,黄世庆,吴海东. 适用于高频激励的面内轮胎动态模型[J]. 吉林大学学报(工学版), 2020, 50(1): 19-28. |
|
||