吉林大学学报(工学版) ›› 2021, Vol. 51 ›› Issue (2): 549-556.doi: 10.13229/j.cnki.jdxbgxb20191088
• 交通运输工程·土木工程 • 上一篇
考虑垂向⁃侧向运动的半挂列车动力学建模及分析
李洪雪( ),李世武,孙文财(),王琳虹,杨志发
),李世武,孙文财(),王琳虹,杨志发
- 吉林大学 交通学院,长春 130022
Dynamic modeling and analysis of semi⁃trailers considering ride and lateral motions
Hong-xue LI(),Shi-wu LI,Wen-cai SUN(),Lin-hong WANG,Zhi-fa YANG
- College of Transportation,Jilin University,Changchun 130022,China
摘要:
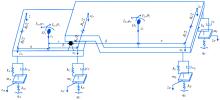
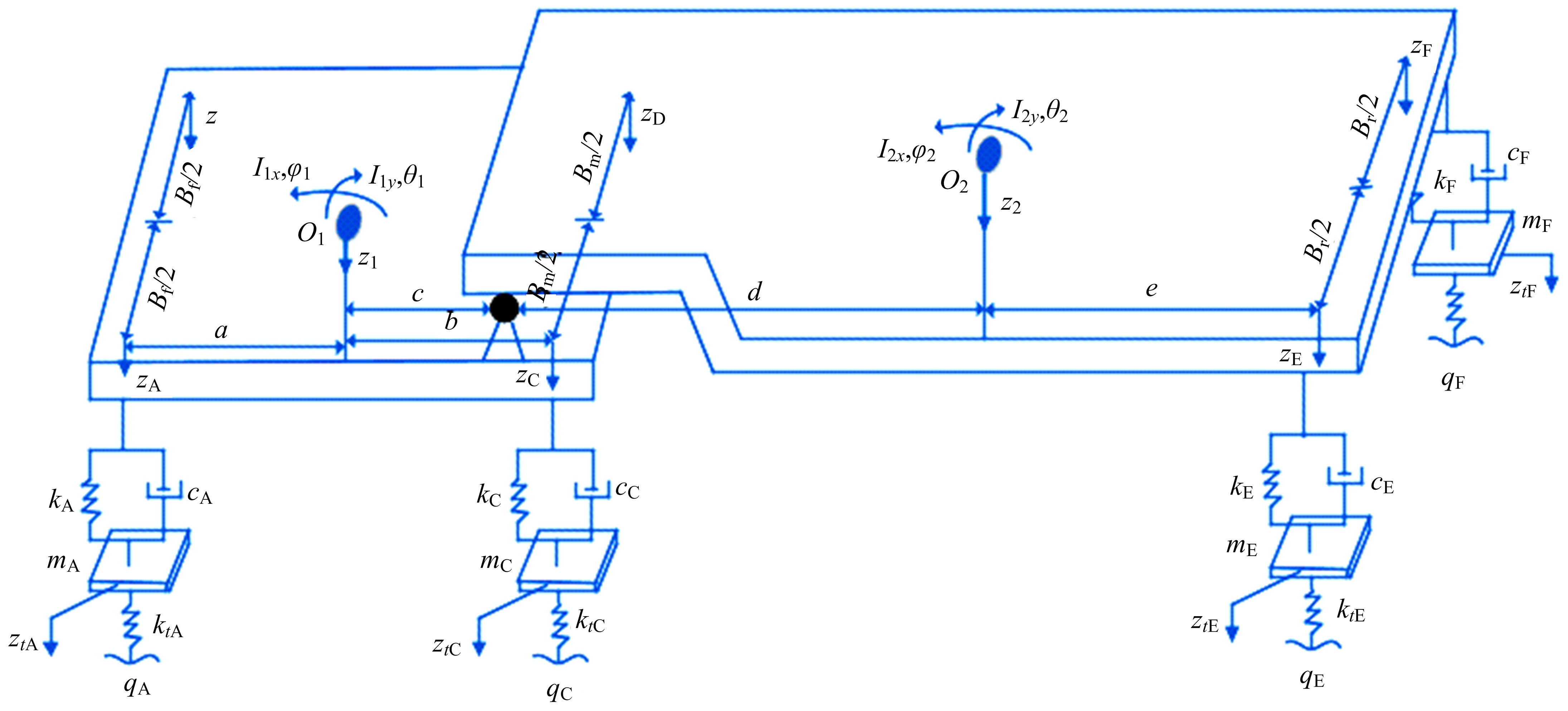
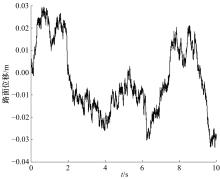
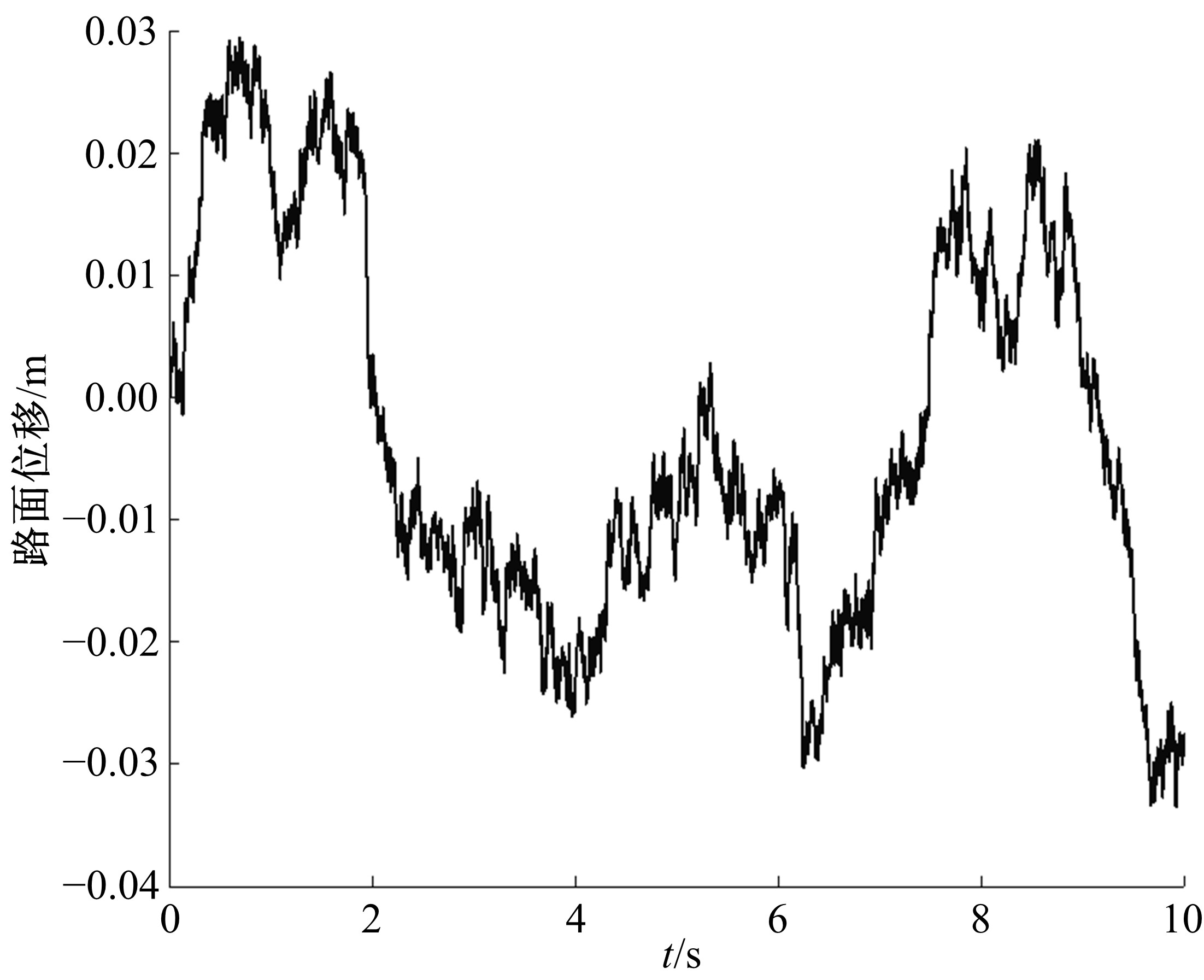
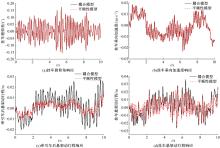
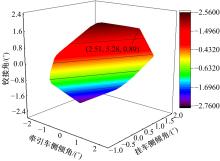
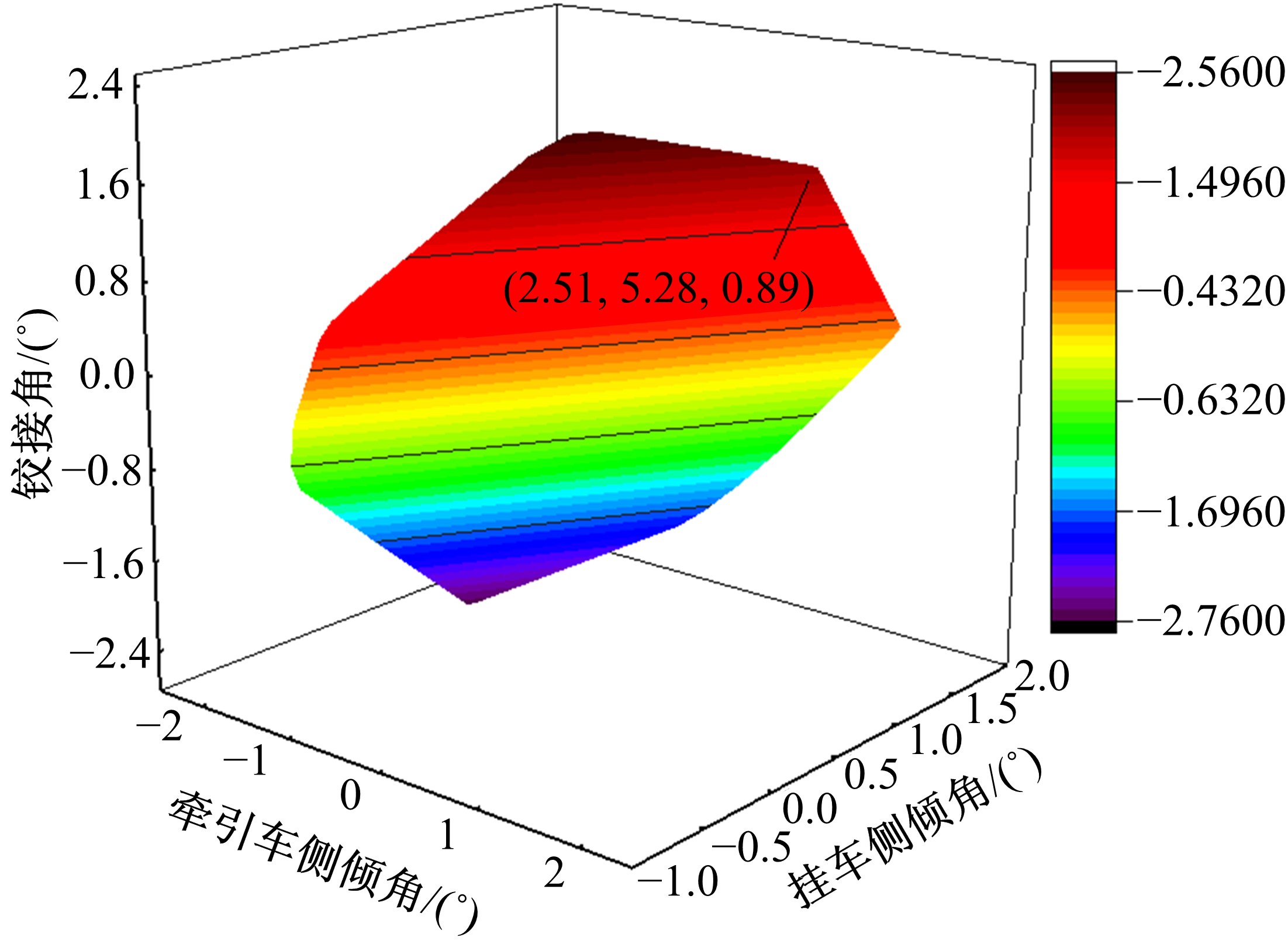
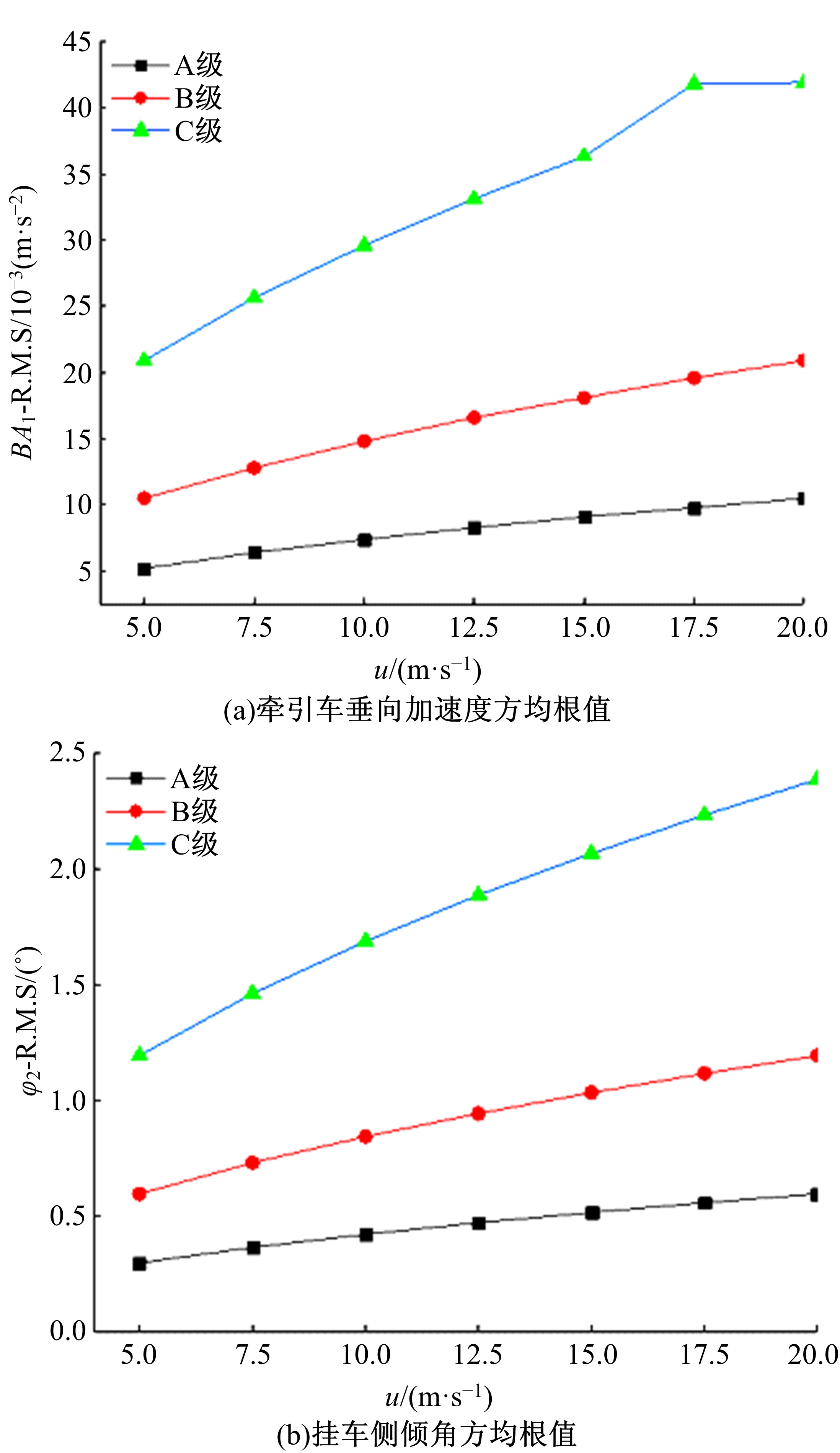
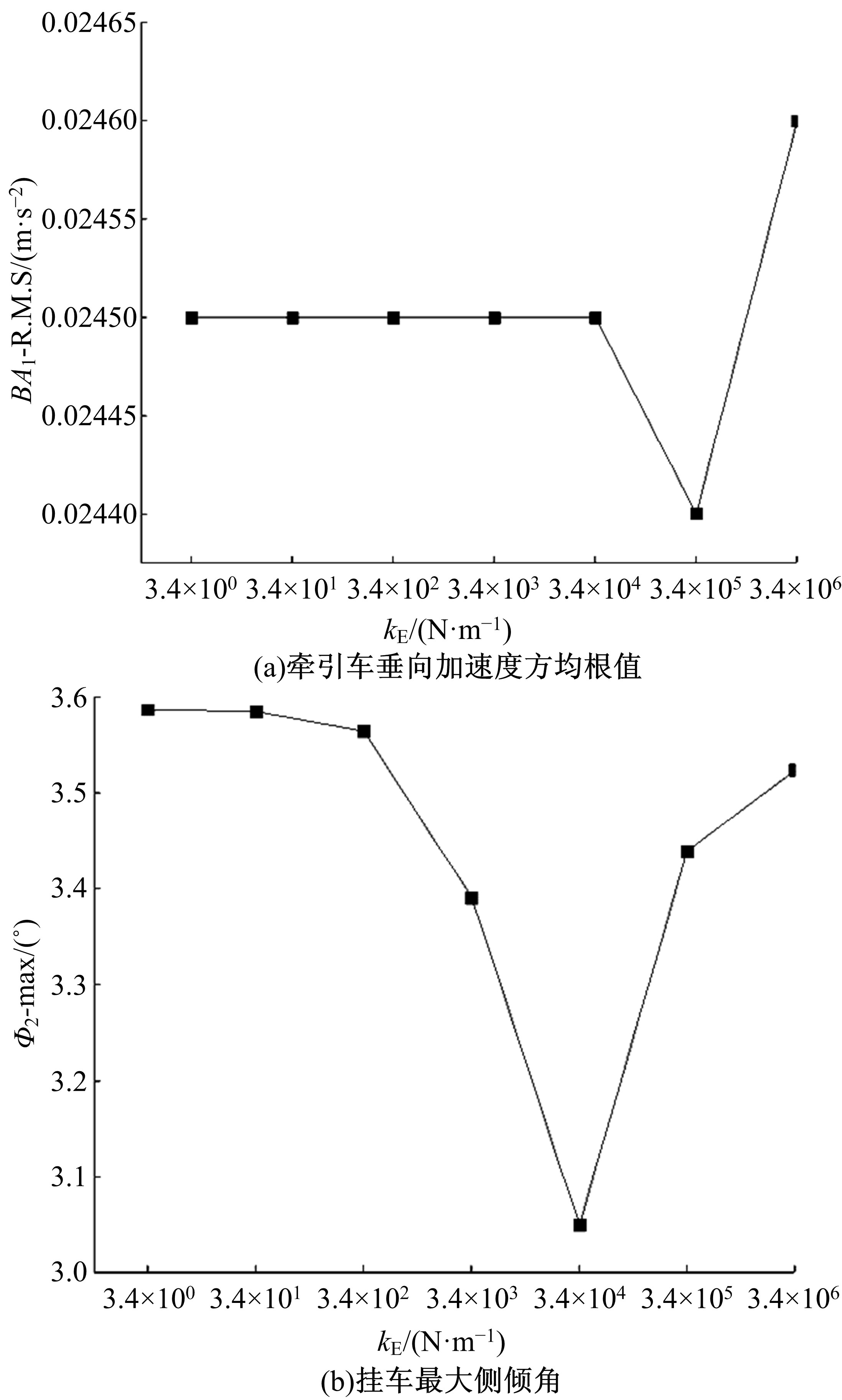
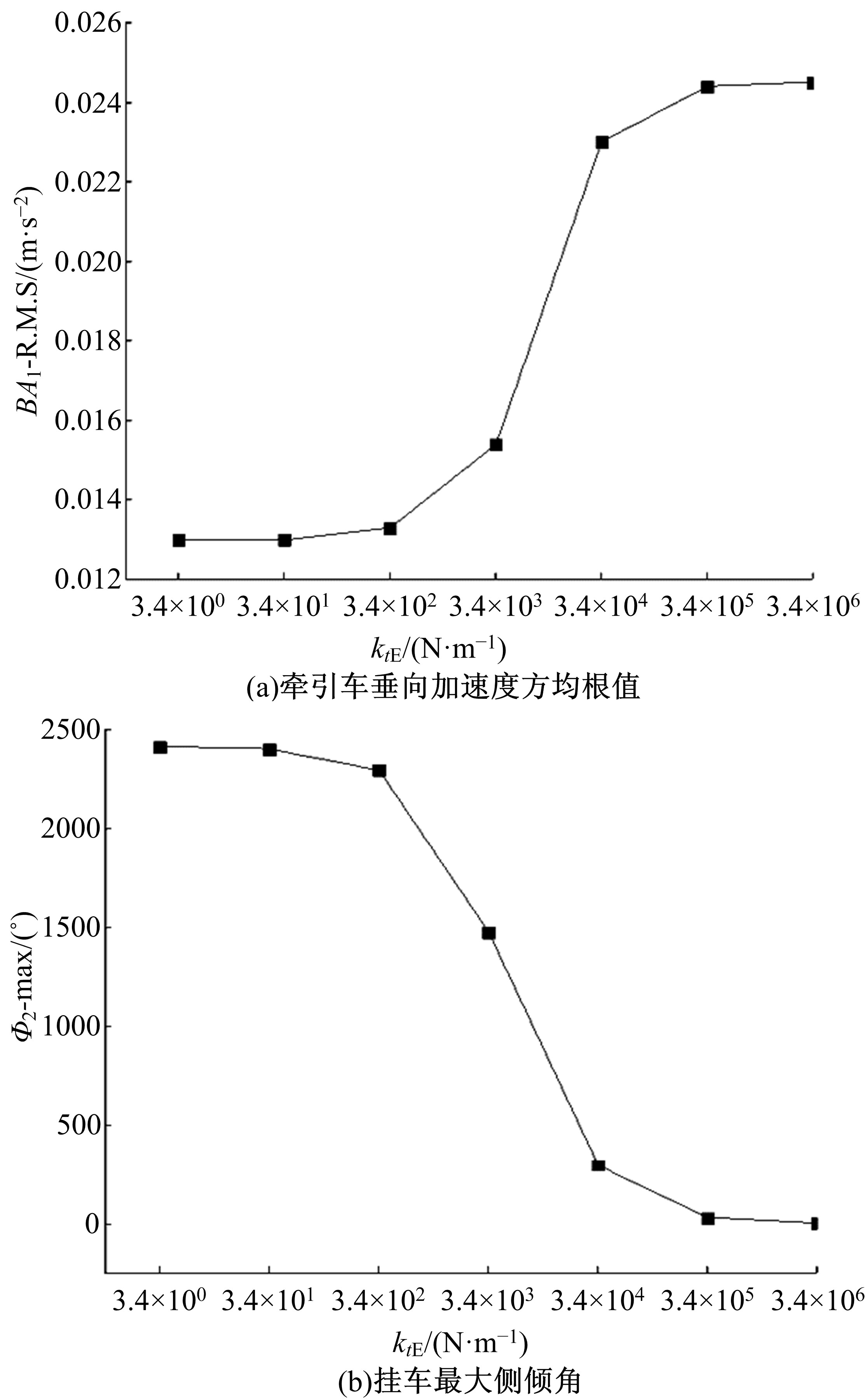
铰接车辆的动力学模型对于理解车辆系统内在的复杂关系,预估车辆性能的变化以及完善新车型的开发具有重要意义。本文建立了11自由度垂向和侧向耦合的3轴半挂汽车列车动力学模型。通过与整车的平顺性模型对比,验证所建模型的有效性。并且进一步研究了道路的不平度激励、车辆行驶速度、挂车悬架刚度、挂车轮胎刚度参数变化引起的车身跳动和侧倾运动的规律。研究结果可为铰接车辆的设计控制和参数匹配提供参考价值。
中图分类号:
- U469.5



| 1 | Mendes A D S, Fleury A D T, Ackermann M. Assessing the influence of the road-tire friction coefficient on the yaw and roll stability of articulated vehicles[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2019, 233(12): 2987-2999. |
| 2 | Sun W, Li Y, Huang J. Efficiency improvement of vehicle active suspension based on multi-objective integrated optimization[J]. Journal of Vibration and Control, 2017, 23(4): 539-554. |
| 3 | 王德军, 杜婉彤, 王晰聪. 基于模型分解的车辆侧倾控制器设计[J]. 吉林大学学报: 信息科学版, 2016, 34(2): 81-87. |
| Wang De-jun, Du Wan-tong, Wang Xin-cong. Vehicle roll controller design based on model decomposition[J]. Journal of Jinlin University (Information Science Edition), 2016, 34(2): 81-87. | |
| 4 | Islam M M, He Y, Zhu S L. A comparative study of multi-trailer articulated heavy-vehicle models[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2015, 229(9): 1200-1228. |
| 5 | Li H X, Li S W, Sun W C, et al. Vibration and handling stability analysis of articulated vehicle with hydraulically interconnected suspension[J]. Journal of Vibration and Control, 2019, 25(13): 1899-1913. |
| 6 | Biglarbegian M, Zu J W. Tractor-semitrailer model for vehicles carrying liquids[J]. Vehicle System Dynamics, 2016, 44(11): 871-885. |
| 7 | 刘献栋, 吕海波, 张红卫, 等. 半挂汽车列车结构参数及模型处理方式对平顺性的影响[J]. 重庆交通大学学报: 自然科学版, 2015, 34(5): 139-144. |
| Liu Xian-dong, Lv Hai-bo, Zhang Hong-wei, et al. Effect of structure parameters and model processing method of tractor-semitrailer combination on the ride performance[J]. Journal of Chongqing Jiaotong University (Natural Science), 2015, 34(5): 139-144. | |
| 8 | 李韶华, 杨绍普, 陈立群. 三向耦合非线性重型汽车建模及动力学分析[J]. 振动与冲击, 2014, 33(22): 131-138. |
| Li Shao-hua, Yang Shao-pu, Chen Li-qun. Modeling and dynamic analysis of a non-linear heavy vehicle with three-directional coupled motions[J]. Journal of Vibration and Shock, 2014, 33(22): 131-138. | |
| 9 | 宋康, 陈潇凯, 林逸. 汽车行驶动力学性能的多目标优化[J]. 吉林大学学报: 工学版, 2015, 45(2): 352-357. |
| Song Kang, Chen Xiao-kai, Lin Yi. Multi-objective optimization of vehicle ride dynamic behaviors[J]. Journal of Jinlin University (Engineering and Technology Edition), 2015, 45(2): 352-357. | |
| 10 | 徐程, 曲昭伟, 金盛. 考虑侧向偏移的车辆跟驰行为建模及仿真[J]. 吉林大学学报: 工学版, 2014, 44(6): 1609-1615. |
| Xu Cheng, Qu Zhao-wei, Jin Sheng. Modeling and simulation of car following behavior considering lateral separation[J]. Journal of Jinlin University (Engineering and Technology Edition), 2014, 44(6): 1609-1615. | |
| 11 | Li X, Wang G, Yao Z. Dynamic model and validation of an articulated steering wheel loader on slopes and over obstacles[J]. Vehicle System Dynamics, 2013, 51(9): 1305-1323. |
| 12 | Zhang Y, Khajepour A, Huang Y. Multi-axle/articulated bus dynamics modeling: a reconfigurable approach[J]. Vehicle System Dynamics, 2018, 56(9): 1315-1343. |
| 13 | Aoki A, Marumo Y, Kageyama I. Effects of multiple axles on the lateral dynamics of multi-articulated vehicles[J]. Vehicle System Dynamics, 2013, 51(3): 338-359. |
| 14 | Pan H, Sun W, Jing X. Adaptive tracking control for active suspension systems with non-ideal actuators[J]. Journal of Vibration and Control, 2017, 399: 2-20. |
| 15 | 喻凡. 汽车系统动力学[M]. 北京: 机械工业出版社, 2016. |
| [1] | 陈国迎,姚军,王鹏,夏其坤. 适用于后轮轮毂驱动车辆的稳定性控制策略[J]. 吉林大学学报(工学版), 2021, 51(2): 397-405. |
| [2] | 翟富刚,尹燕斌,李超,田纬,乔子石. 伺服电动缸传动系统刚度建模与前馈控制[J]. 吉林大学学报(工学版), 2021, 51(2): 442-449. |
| [3] | 张健,吴坤润,杨敏,冉斌. 智能网联环境下交叉口双环自适应控制模型[J]. 吉林大学学报(工学版), 2021, 51(2): 541-548. |
| [4] | 王殿海,沈辛夷,罗小芹,金盛. 车均延误最小情况下的相位差优化方法[J]. 吉林大学学报(工学版), 2021, 51(2): 511-523. |
| [5] | 初亮,董力嘉,许楠,张立峰,贾一帆,杨志华. 基于开绕组电机的增程式电动车动力系统构型及其功率分配[J]. 吉林大学学报(工学版), 2021, 51(1): 72-82. |
| [6] | 曾小华,李晓建,杜劭峰,马涛,王振伟,宋大凤. 多轮混合动力驱动无人驾驶框架车整车控制器开发[J]. 吉林大学学报(工学版), 2021, 51(1): 63-71. |
| [7] | 何德峰,罗捷,舒晓翔. 自主网联车辆时滞反馈预测巡航控制[J]. 吉林大学学报(工学版), 2021, 51(1): 349-357. |
| [8] | 胡云峰,丁一桐,赵志欣,蒋冰晶,高金武. 柴油发动机燃烧过程数据驱动建模与滚动优化控制[J]. 吉林大学学报(工学版), 2021, 51(1): 49-62. |
| [9] | 陈学深,黄柱健,马旭,齐龙,方贵进. 水稻机械除草避苗控制系统设计与试验[J]. 吉林大学学报(工学版), 2021, 51(1): 386-396. |
| [10] | 吴爱国,韩俊庆,董娜. 基于极局部模型的机械臂自适应滑模控制[J]. 吉林大学学报(工学版), 2020, 50(5): 1905-1912. |
| [11] | 贾超,徐洪泽,王龙生. 基于多质点模型的列车自动驾驶非线性模型预测控制[J]. 吉林大学学报(工学版), 2020, 50(5): 1913-1922. |
| [12] | 陈海燕. 分布式通信网络多频段信号源远程切换控制算法[J]. 吉林大学学报(工学版), 2020, 50(5): 1886-1893. |
| [13] | 李静,石求军,洪良,刘鹏. 基于车辆状态估计的商用车ESC神经网络滑模控制[J]. 吉林大学学报(工学版), 2020, 50(5): 1545-1555. |
| [14] | 陈吉清,蓝庆生,兰凤崇,刘照麟. 基于轮胎力预判与拟合的轨迹跟踪控制[J]. 吉林大学学报(工学版), 2020, 50(5): 1565-1573. |
| [15] | 王伟,赵健廷,胡宽荣,郭永仓. 基于快速非奇异终端滑模的机械臂轨迹跟踪方法[J]. 吉林大学学报(工学版), 2020, 50(2): 464-471. |
|
||