吉林大学学报(工学版) ›› 2021, Vol. 51 ›› Issue (2): 397-405.doi: 10.13229/j.cnki.jdxbgxb20191037
• 车辆工程·机械工程 •
适用于后轮轮毂驱动车辆的稳定性控制策略
陈国迎1( ),姚军2,王鹏2,夏其坤2
),姚军2,王鹏2,夏其坤2
- 1.吉林大学 汽车仿真与控制国家重点实验室,长春 130022
2.吉林大学 汽车工程学院,长春 130022
Stability control strategy for rear in⁃wheel motor drive vehicle
Guo-ying CHEN1(),Jun YAO2,Peng WANG2,Qi-kun XIA2
- 1.State Key Laboratory of Automobile Simulation and Control,Jilin University,Changchun 130022,China
2.College of Automotive Engineering,Jilin University,Changchun 130022,China
摘要:
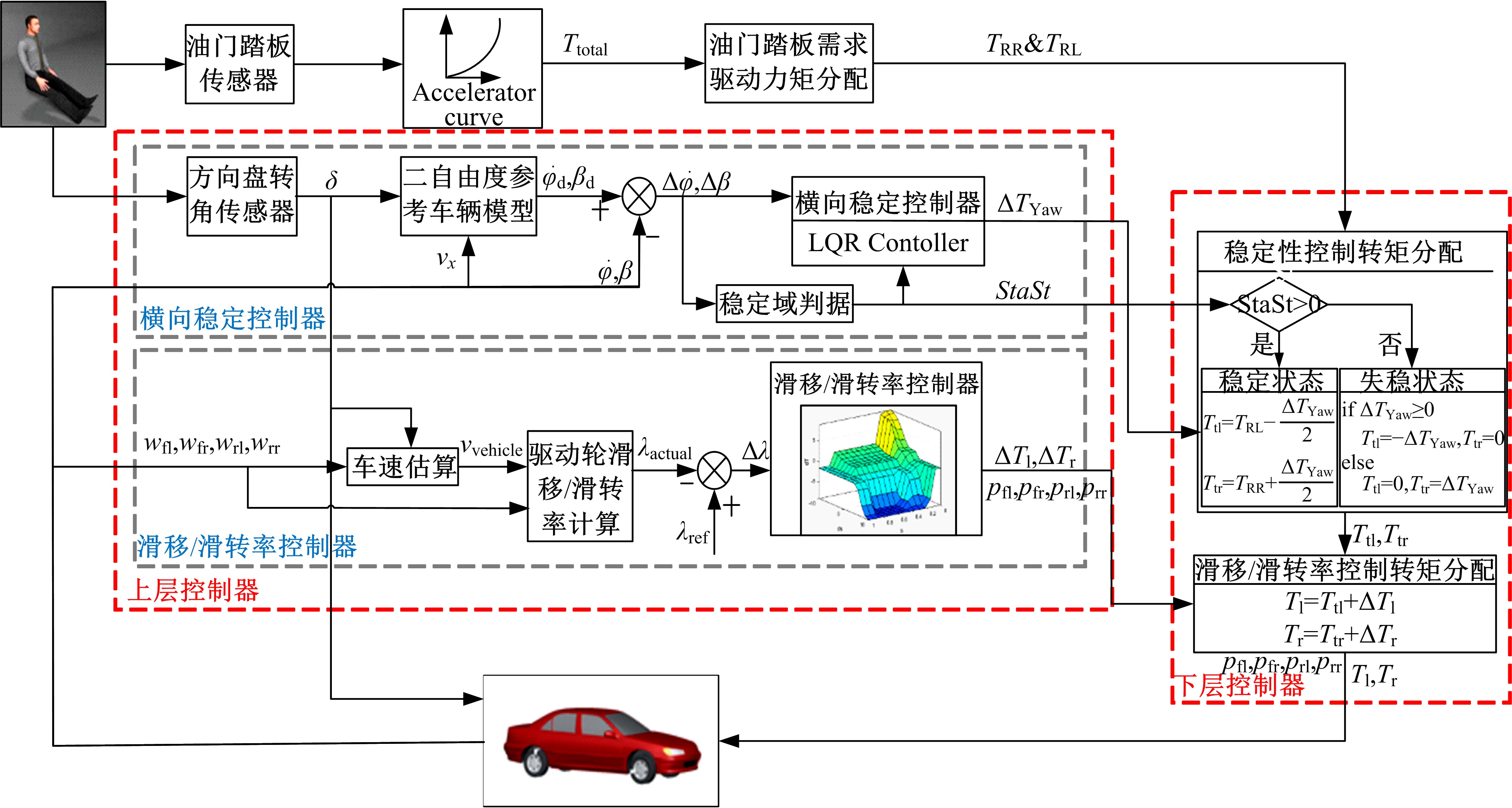
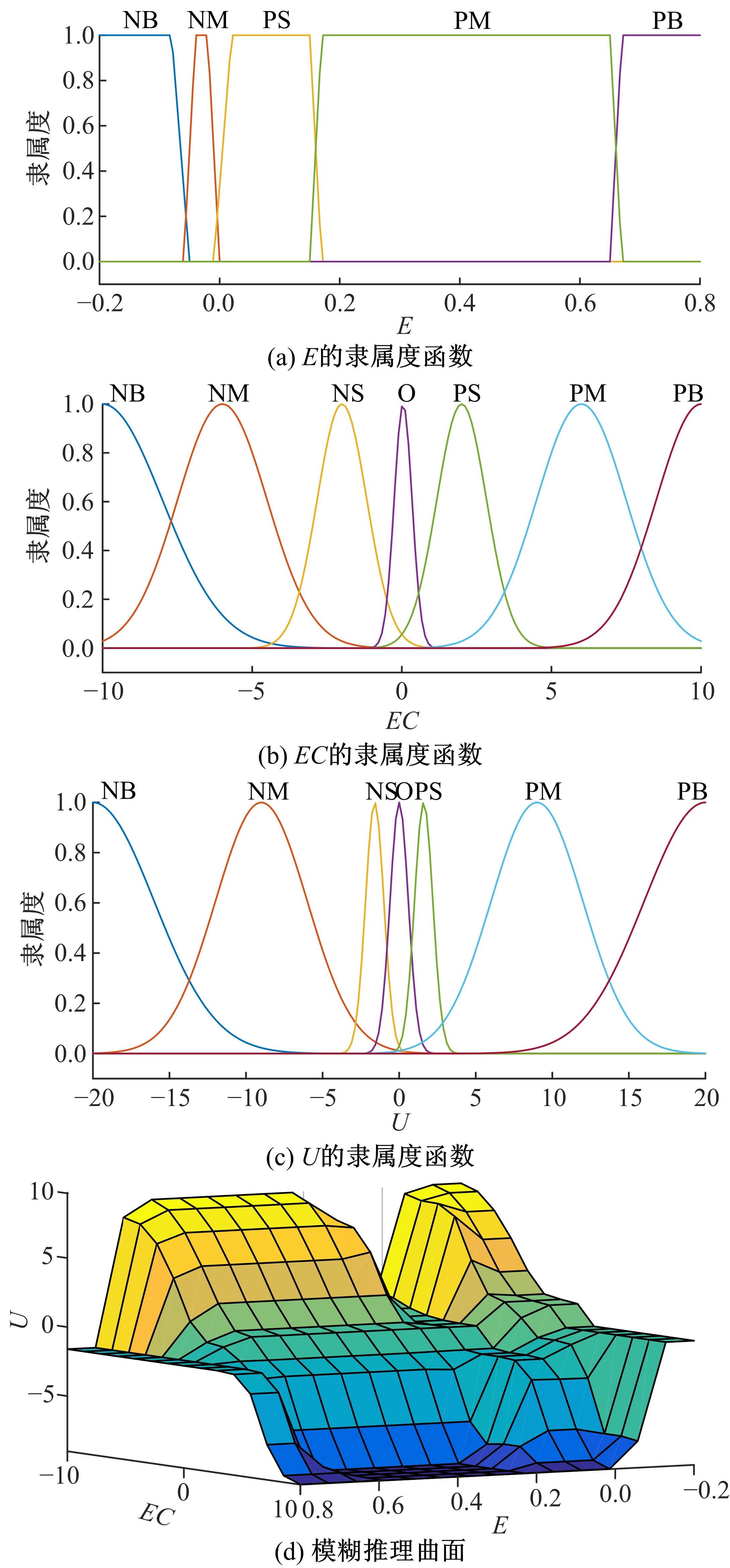
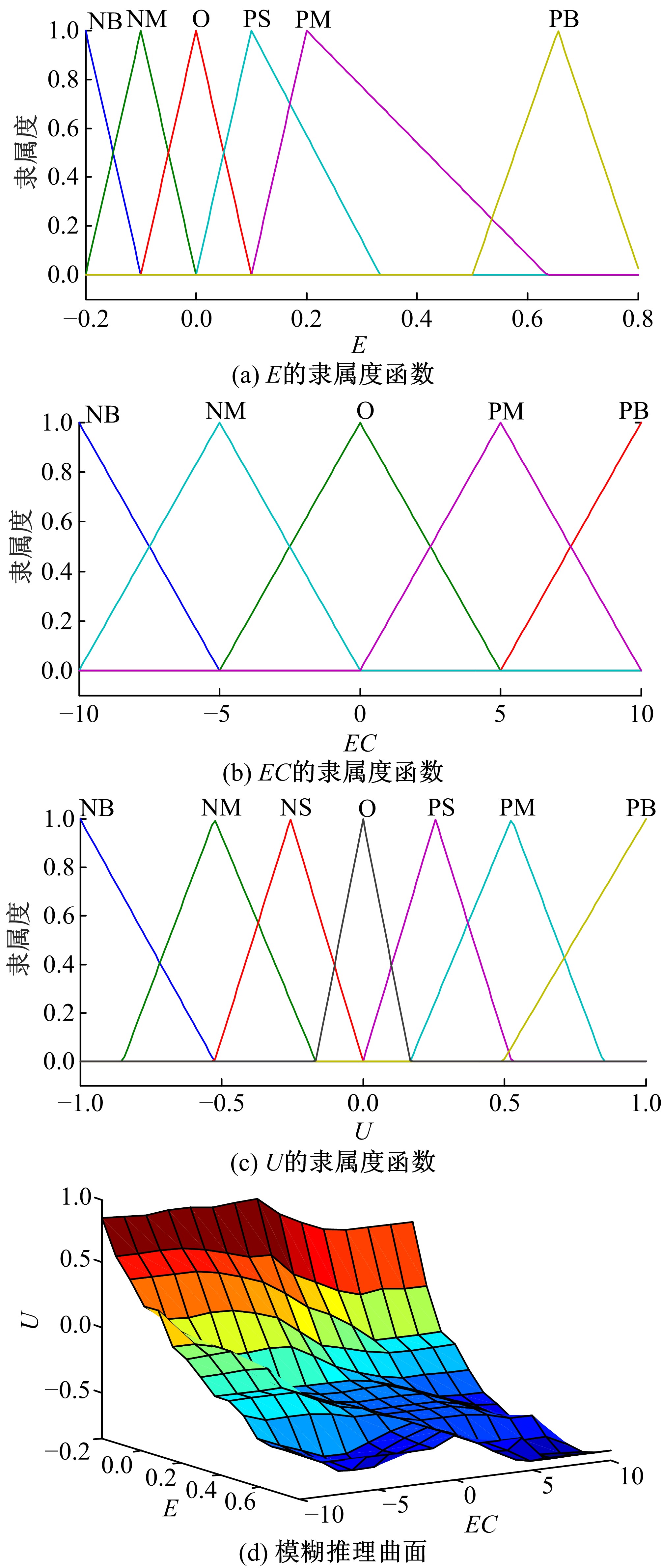
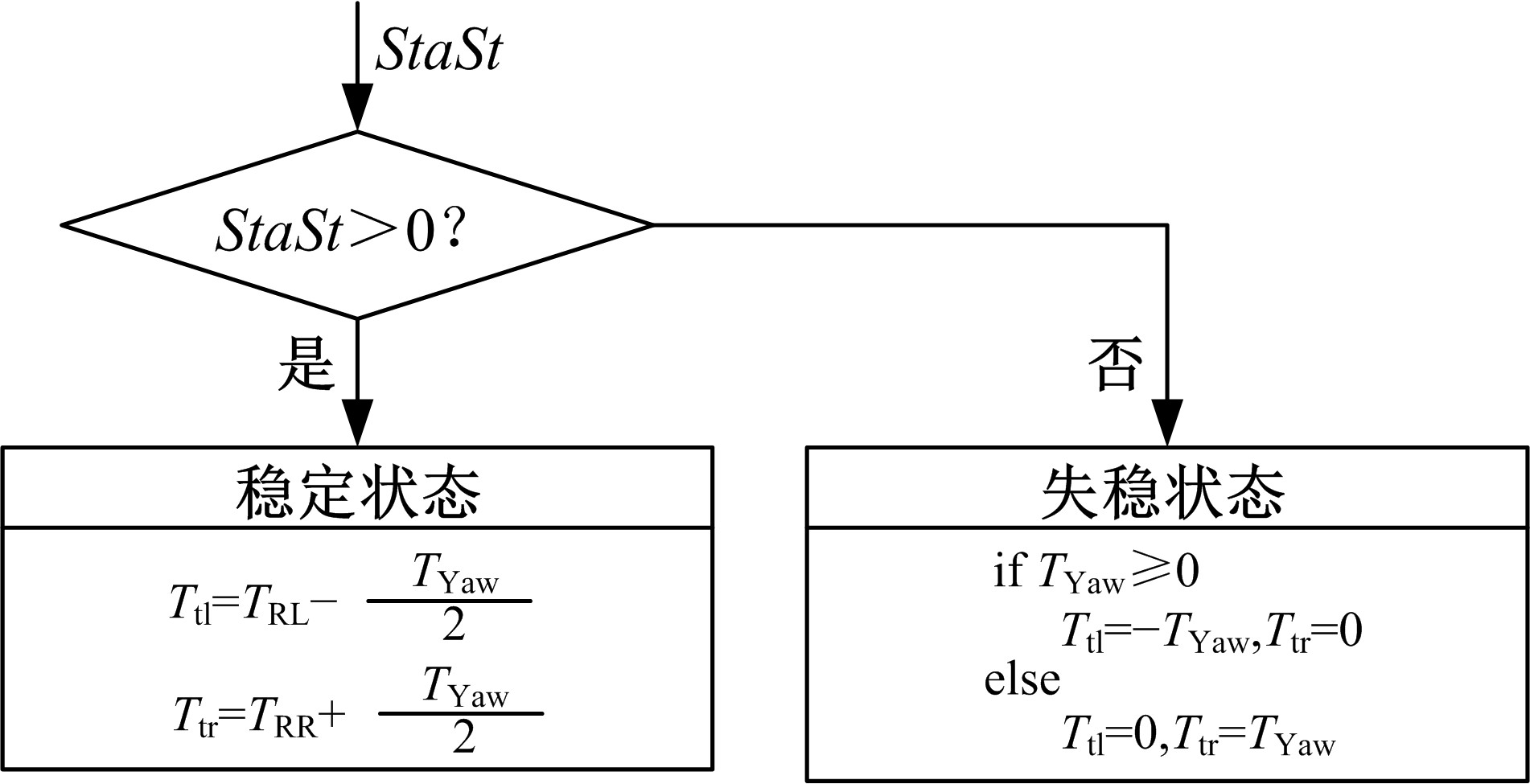
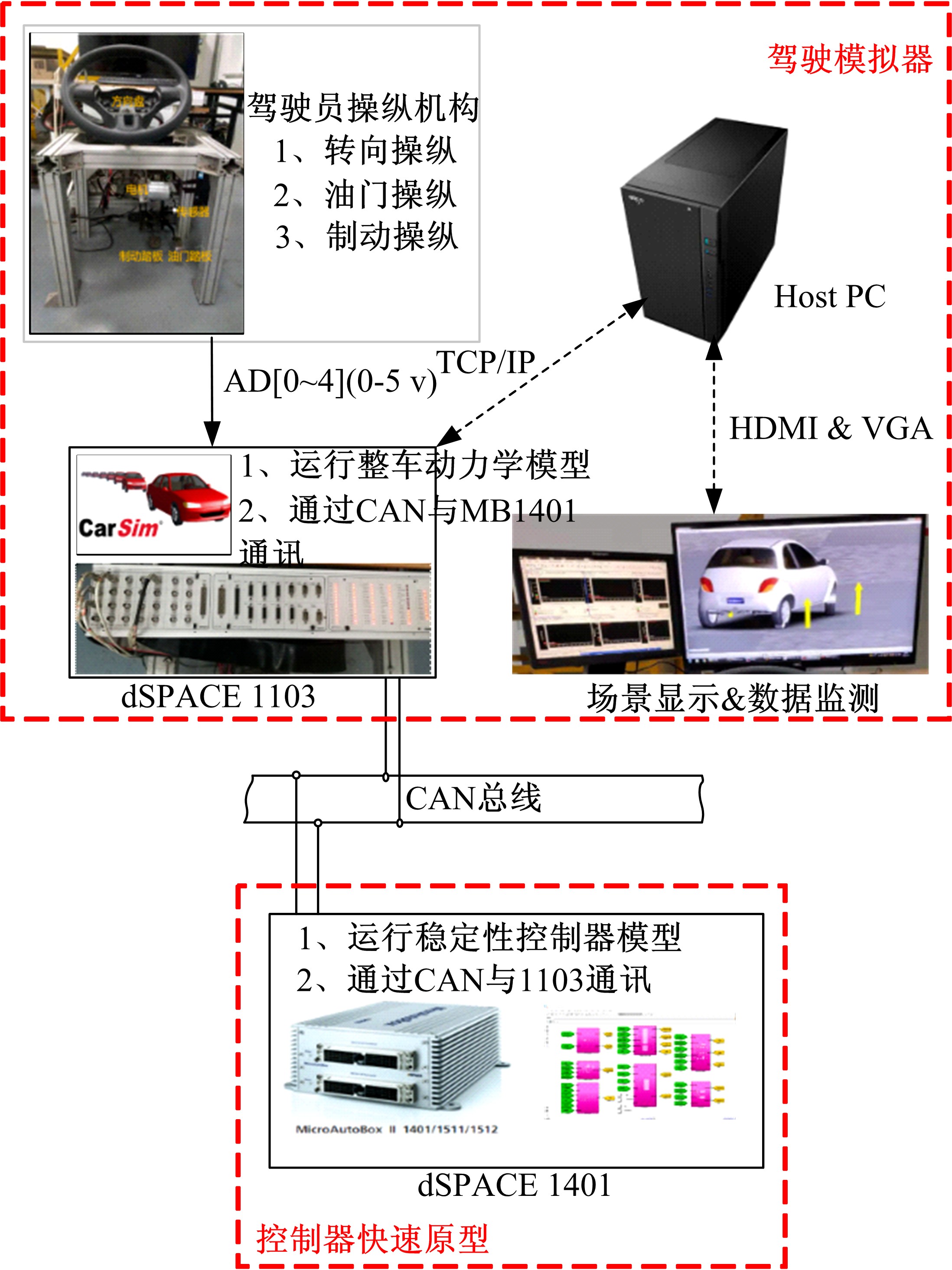
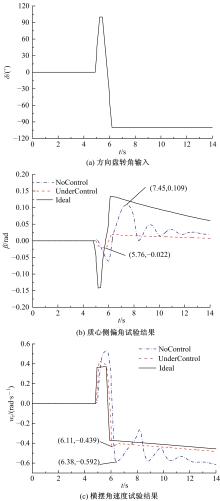
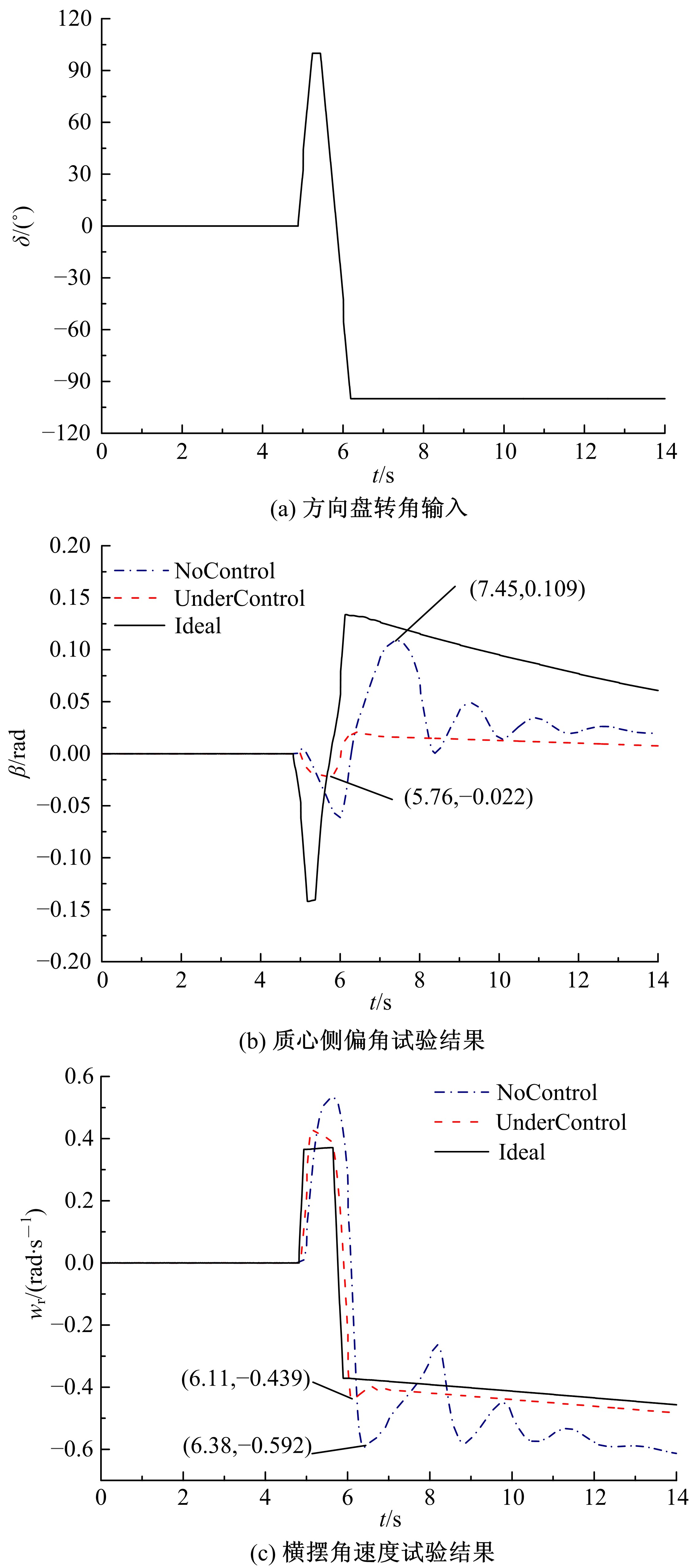
针对后轮轮毂驱动车辆的稳定性控制问题,提出了基于分层结构的稳定性控制器。首先,在上层控制器中利用参考模型计算理想车辆运动状态,采用LQR控制器计算车辆需要的附加横摆力矩,并根据车辆的稳定性状态进行变权重的设计。其次,为了使车辆能获得尽可能大的地面附着力,提出模糊控制器对每个车轮的滑移/滑转率进行控制。在下层控制器中,根据车辆的稳定性状态对后轮轮毂电机的驱动力矩进行分配。最后,通过VCU在环试验对控制器的有效性进行了验证。结果表明:本文提出的稳定性控制器在车辆处于稳定域内时能计算出附加横摆力矩,控制车辆的横摆角速度,迅速跟随理想值,并抑制质心侧偏角的增大;当车辆处于失稳状态时,能控制车辆迅速恢复稳定,抑制车辆的侧滑。在整个控制过程中,车轮的滑移/滑转率始终保持在最佳滑移/滑转率附近,保证车辆获得较大的附着力。
中图分类号:
- U461.6




| 1 | Najjari B, Mirzaei M, Tahouni A. Constrained stability control with optimal power management strategy for in-wheel electric vehicles[J]. Proceedings of the Institution of Mechanical Engineers, Part K: Journal of Multi-body Dynamics, 2019, 233(4): 1014-1032. |
| 2 | Asiabar A N, Kazemi R. A direct yaw moment controller for a four in-wheel motor drive electric vehicle using adaptive sliding mode control[J]. Proceedings of the Institution of Mechanical Engineers, Part K: Journal of Multi-body Dynamics, 2019, 233(3): 549-567. |
| 3 | Zhang Z, Zhao W, Wang C, et al. Stability control of in-wheel motor electric vehicles under extreme conditions[J]. Transactions of the Institute of Measurement and Control, 2019, 41(10): 2838-2850. |
| 4 | Zhai L, Sun T, Wang J. Electronic stability control based on motor driving and braking torque distribution for a four in-wheel motor drive electric vehicle[J]. IEEE Transactions on Vehicular Technology, 2016, 65(6): 4726-4739. |
| 5 | Chen Y, Chen S, Zhao Y, et al. Optimized handling stability control strategy for a four in-wheel motor independent-drive electric vehicle[J]. IEEE Access, 2019(7): 17017-17032. |
| 6 | Chae M, Hyun Y, Yi K, et al. Dynamic handling characteristics control of an in-wheel-motor driven electric vehicle based on multiple sliding mode control approach[J]. IEEE Access, 2019(7): 448-458. |
| 7 | Li B, Goodarzi A, Khajepour A, et al. An optimal torque distribution control strategy for four-independent wheel drive electric vehicles[J]. Vehicle System Dynamics, 2015, 53(8): 1172-1189. |
| 8 | Peng H, Wang W, Xiang C, et al. Torque coordinated control of four in-wheel motor independent-drive vehicle with consideration of the safety and economy[J]. IEEE Transactions on Vehicular Technology, 2019, 68(10): 9604-9618. |
| 9 | 黄彩霞, 雷飞, 胡林, 等. 轮毂电机驱动汽车区域极点配置横向稳定性控制[J]. 汽车工程, 2019, 41(8): 905-914. |
| Huang Cai-xia, Lei Fei, Hu Lin, et al. Lateral stability control based on regional pole placement of in-wheel-motored electric vehicle[J]. Automotive Engineering, 2019, 41(8): 905-914. | |
| 10 | 于树友, 谭雷, 王伍洋, 等. 基于三步法的汽车主动四轮转向控制[J]. 吉林大学学报: 工学版, 2019, 49(3): 934-942. |
| Yu Shu-you, Tan Lei, Wang Wu-yang, et al. Control of active four wheel steering vehicle based on triple⁃step method[J]. Journal of Jilin University (Engineering and Technology Edition), 2019, 49(3): 934-942. | |
| 11 | 孟腾飞. 四驱轮毂电机电动汽车驱动转矩控制策略研究[D]. 镇江: 江苏大学汽车与交通工程学院, 2018. |
| Meng Teng-fei. Research on control strategy of drive torque for four-wheel-independent-drive electric vehicles[D]. Zhenjiang: School of Automotive and Traffic Engineering, Jiangsu University, 2018. | |
| 12 | Rajamani R. Vehicle Dynamics and Control[M]. Boston, Vehicle Dynamics and Control, 2006. |
| 13 | 郭建华. 双轴汽车电子稳定性协调控制系统研究[D]. 长春: 吉林大学汽车工程学院, 2008. |
| Guo Jian-hua. Research on electronic stability coordinated control system for double-axle vehicles[D]. Changchun: College of Automotive Engineering, Jilin University, 2008. | |
| 14 | 何仁, 冯海鹏. 基于峰值附着系数曲面的路面辨识算法[J]. 吉林大学学报: 工学版, 2020, 50(4): 1245-1256. |
| He Ren, Feng Hai-peng. Road surface identification algorithm based on peak adhesion coefficient surface[J]. Journal of Jilin University (Engineering and Technology Edition), 2020, 50(4): 1245-1256. |
| [1] | 马芳武,梁鸿宇,王强,蒲永锋. 双材料负泊松比结构的面内冲击动力学性能[J]. 吉林大学学报(工学版), 2021, 51(1): 114-121. |
| [2] | 吴岛,张立斌,张云翔,单洪颖,单红梅. 基于滑移率辨识的汽车制动时序视觉检测方法[J]. 吉林大学学报(工学版), 2021, 51(1): 206-216. |
| [3] | 张恩慧,何仁,苏卫东. 不同挡板结构对油箱内油液晃动特性的数值分析[J]. 吉林大学学报(工学版), 2021, 51(1): 83-95. |
| [4] | 熊璐,魏琰超,高乐天. 基于惯性测量单元/轮速融合的车辆零速检测方法[J]. 吉林大学学报(工学版), 2021, 51(1): 134-138. |
| [5] | 陈吉清,蓝庆生,兰凤崇,刘照麟. 基于轮胎力预判与拟合的轨迹跟踪控制[J]. 吉林大学学报(工学版), 2020, 50(5): 1565-1573. |
| [6] | 杨志刚,范亚军,夏超,储世俊,单希壮. 基于双稳态尾迹的方背Ahmed模型减阻[J]. 吉林大学学报(工学版), 2020, 50(5): 1635-1644. |
| [7] | 沈哲,王毅刚,杨志刚,贺银芝. 风洞中未知声源漂移误差的逼近修正[J]. 吉林大学学报(工学版), 2020, 50(5): 1584-1589. |
| [8] | 刘钊,程江琳,朱玉田,郑立辉. 轨道车辆垂向振动建模及运动关联分析[J]. 吉林大学学报(工学版), 2020, 50(5): 1600-1607. |
| [9] | 高菲,肖阳,张文华,祁锦轩,李子樵,马骁远. 高温和荷电状态对锂离子电池单体力学响应的耦合影响[J]. 吉林大学学报(工学版), 2020, 50(5): 1574-1583. |
| [10] | 李静,石求军,洪良,刘鹏. 基于车辆状态估计的商用车ESC神经网络滑模控制[J]. 吉林大学学报(工学版), 2020, 50(5): 1545-1555. |
| [11] | 杜常清,曹锡良,何彪,任卫群. 基于混合粒子群算法的双离合变速器参数优化设计[J]. 吉林大学学报(工学版), 2020, 50(5): 1556-1564. |
| [12] | 李银平,靳添絮,刘立. 纯电动铲运机弓网续能系统设计与动态特性仿真[J]. 吉林大学学报(工学版), 2020, 50(2): 454-463. |
| [13] | 赖晨光,王擎宇,胡博,文凯平,陈彦宇. 静气动弹性影响下带小翼汽车尾翼的设计与优化[J]. 吉林大学学报(工学版), 2020, 50(2): 399-407. |
| [14] | 叶辉,刘畅,闫康康. 纤维增强复合材料在汽车覆盖件中的应用[J]. 吉林大学学报(工学版), 2020, 50(2): 417-425. |
| [15] | 陈鑫,王宁,沈传亮,冯晓,杨昌海. 后视镜造型对前侧窗气动噪声的影响[J]. 吉林大学学报(工学版), 2020, 50(2): 426-436. |
|
||