吉林大学学报(工学版) ›› 2022, Vol. 52 ›› Issue (12): 3029-3038.doi: 10.13229/j.cnki.jdxbgxb20210403
基于电场模型的无人机搜寻改进算法及仿真分析
朱航( ),于瀚博,梁佳辉,李宏泽
),于瀚博,梁佳辉,李宏泽
- 吉林大学 机械与航空航天工程学院,长春 130022
Improved algorithm of UAV search based on electric field model and simulation analysis
Hang ZHU(),Han-bo YU,Jia-hui LIANG,Hong-ze LI
- College of Mechanical and Aerospace Engineering,Jilin University,Changchun 130022,China
摘要:
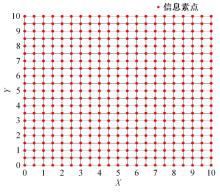
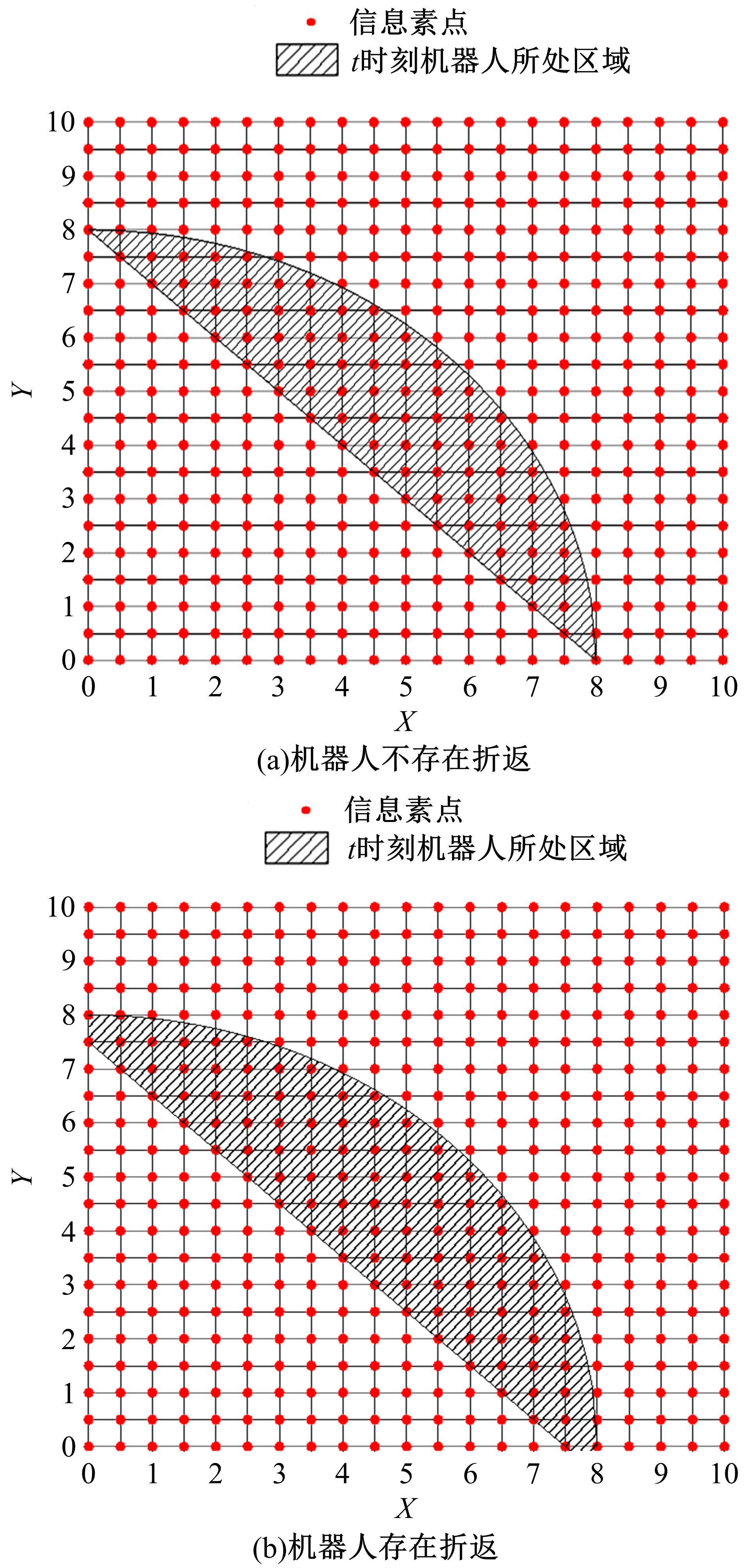
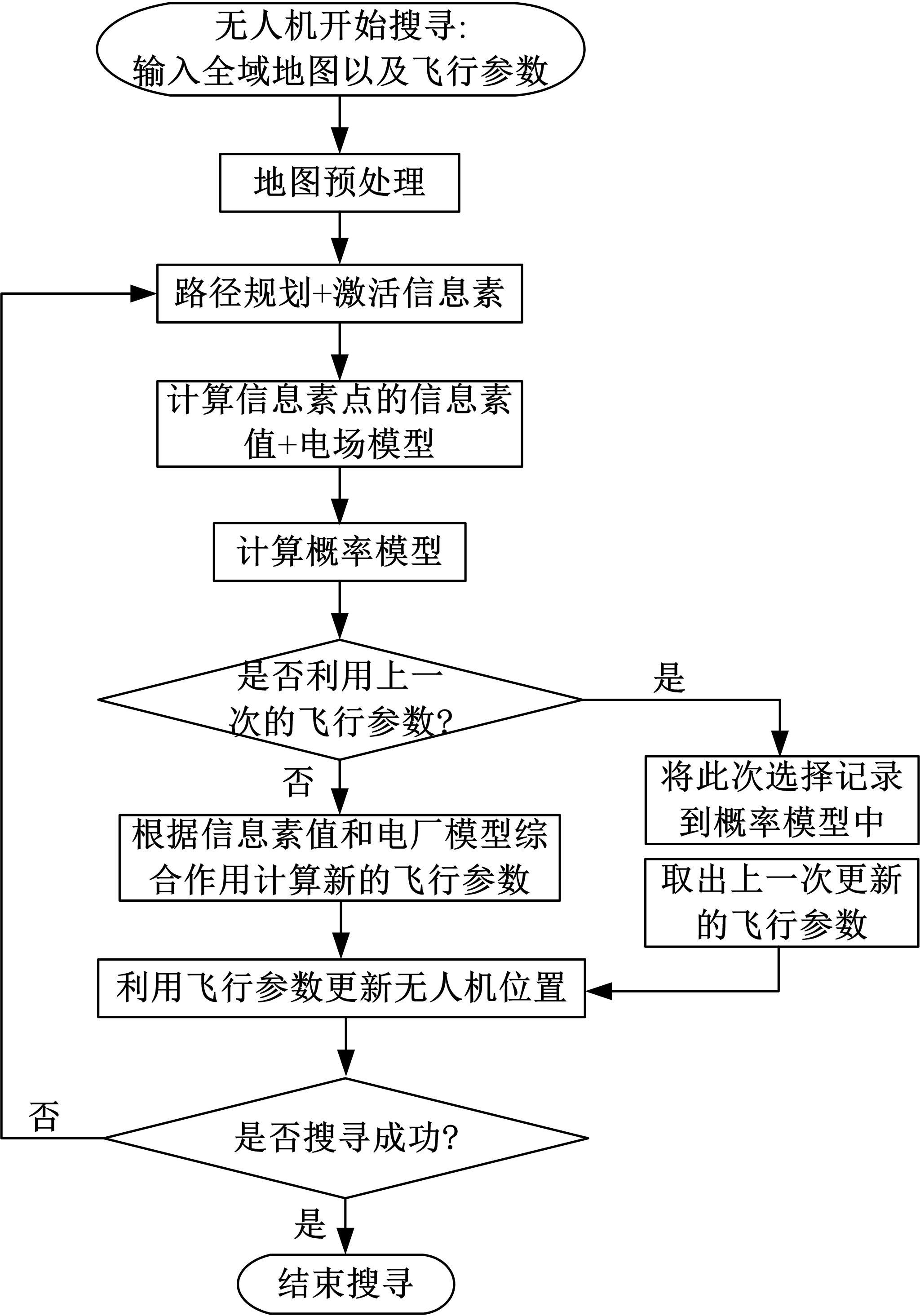
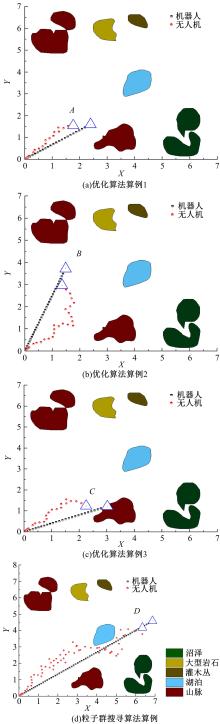
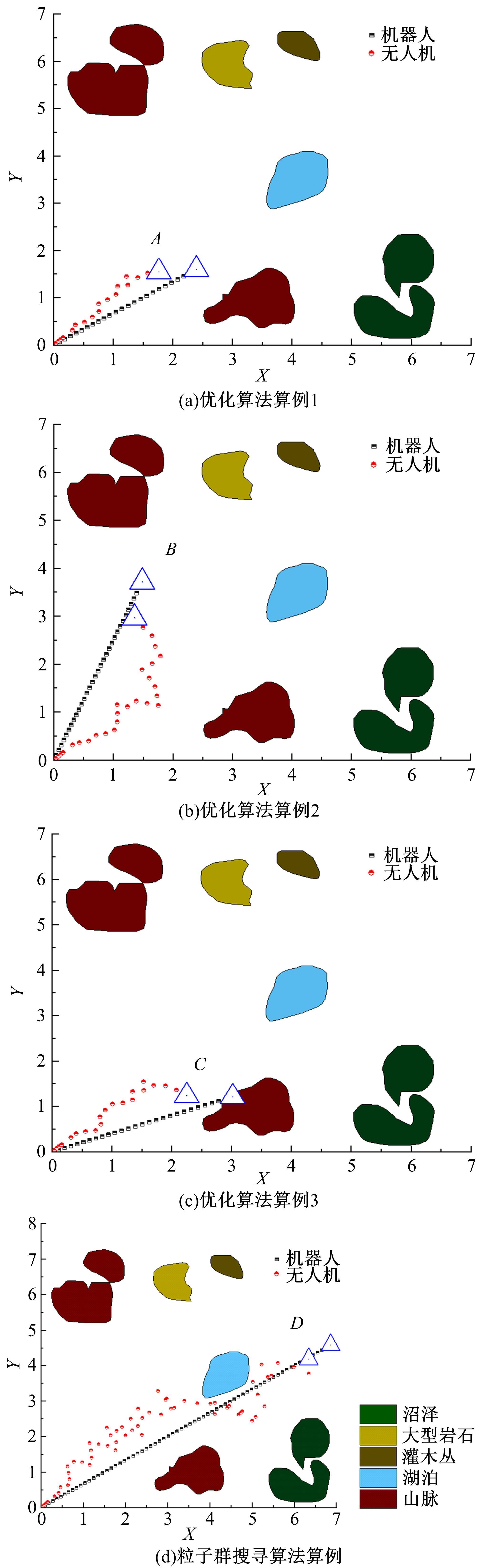
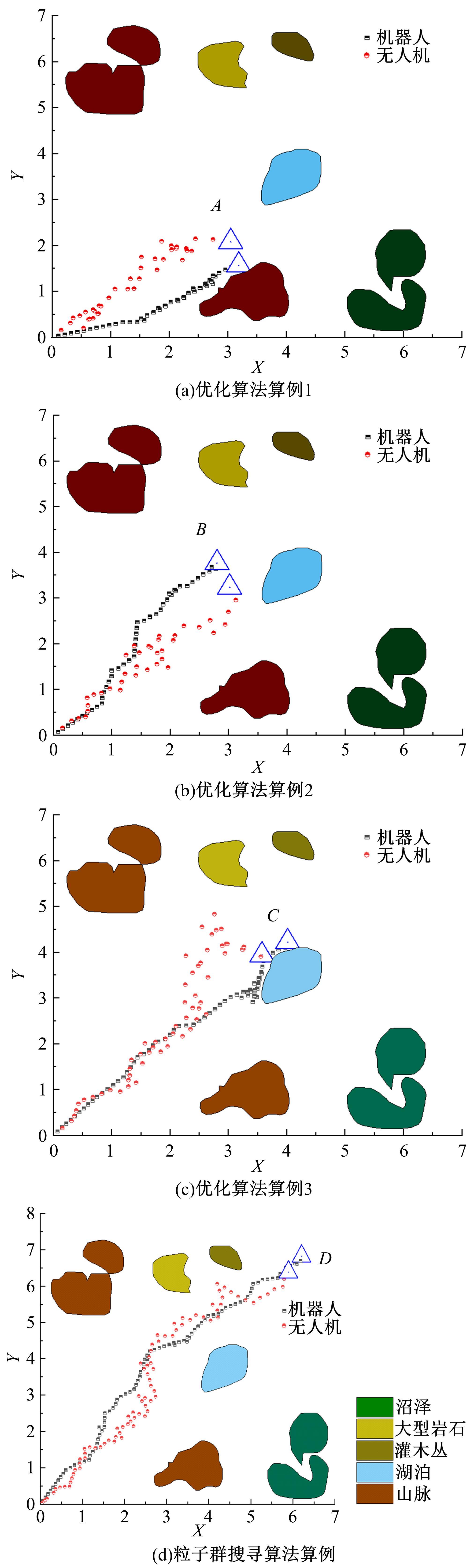
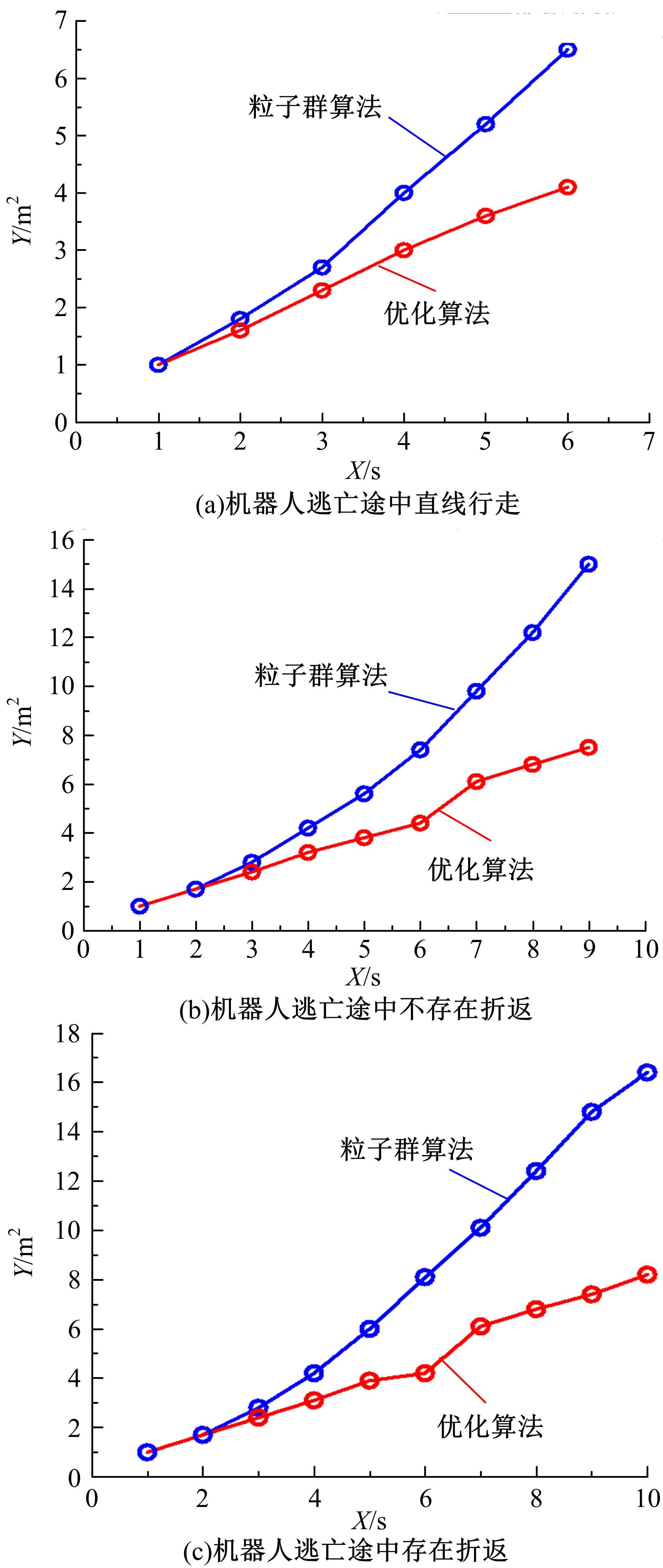
针对单一无人机视觉导航进行地面移动目标搜索的问题,提出了一种基于物理电场模型的改进蚁群算法。定义复杂搜索区域并进行网格划分,网格节点定义为可激活的信息素点,基于物理电场模型规则优化蚁群算法,引入概率模型,建立基于电场模型的无人机搜索改进粒子群算法控制无人机位姿和速度。仿真实验结果表明:改进蚁群算法搜索移动目标的平均成功率为67.3%,算例的平均计算时间为8.33 s,均优于粒子群算法,为单一无人机在区域快速跟踪搜索提供了一种简单、高效的方法。
中图分类号:
- V249






| 1 | Goerzen C, Kong Z, Mettler B. A survey of motion planning algorithms from the perspective of autonomous UAV guidance[J]. Journal of Intelligent and Robotic Systems, 2010, 57(11): 65-100. |
| 2 | Huang Li-wei, Hong Qu, Peng Ji, et al. A novel coordinated path planning method using k-degree smoothing for multi-UAVs[J]. Applied Soft Computing, 2016, 48(11): 182-192. |
| 3 | Duan Hai-bin, Zhang Xiang-yin, Wu Jiang, et al. Max-min adaptive ant colony optimization approach to multi-UAVs coordinated trajectory replanning in dynamic and uncertain environments[J]. Journal of Bionic Engineering, 2009, 6(2): 161-173. |
| 4 | Dong Shi-you, Zhu Xiao-ping, Long Guo-qing. Cooperative planning method for swarm UAVs based on hierarchical strategy[C]∥3rd International Conference on System Science, Engineering Design and Manufacturing Informatization, Pacific Grove, USA, 2012: 304-307. |
| 5 | Liu Yang, Zhan Xue-jun, Guan Xiang-min, et al. Potential odor intensity grid based UAV path planning algorithm with particle swarm optimization approach[J]. Mathematical Problems in Engineering, 2016, 21(2): 1-16. |
| 6 | Moon S W, Oh E, David H S. An integral framework of task assignment and path planning for multiple unmanned aerial vehicles in dynamic environments[J]. Journal of Intelligent & Robotic Systems, 2013, 70(1-4): 303-313. |
| 7 | Mehrez B, Ahmed B. A novel UAV path planning algorithm to search for floating objects on the ocean surface based on object's trajectory prediction by regression[J]. Robotics and Autonomous Systems, 2021, 135(1): 1-18. |
| 8 | Cheng Ze, Wang Er-gan, Tang Yi-xin, et al. Real-time path planning strategy for UAV based on improved particle swarm optimization[J]. Journal of Computers, 2014, 9(1): 209-214. |
| 9 | Shin J J, Bang H, Morlier J. UAV path planning under dynamic threats using an improved PSO algorithm[J]. International Journal of Aerospace Engineering, 2020, 13(6): 1-17. |
| 10 | Liu Yang, Zhan Xue-jun, Guan Xiang-min, et al. Potential odor intensity grid based UAV path planning algorithm with particle swarm optimization approach[J]. Mathematical Problems in Engineering, 2016, 21(9): 1-16. |
| 11 | Dorigo M, Maniezzo V, Colorni A. Ant system: optimization by a colony of cooperating agents[J]. IEEE Transactions on Cybernetics, 1996, 26(1): 29-41. |
| 12 | Perez-Carabaza S, Besada-Portas E, Lopez-Orozco J A, et al. Ant colony optimization for multi-UAV minimum time search in uncertain domains[J]. Applied Soft Computing, 2018, 62(9): 789-806. |
| 13 | Zhen Zi-yang, Yan Chen, Wen Liang-dong, et al. An intelligent cooperative mission planning scheme of UAV swarm in uncertain dynamic environment[J]. Aerospace Science and Technology, 2020, 100(1): 1-16. |
| 14 | Zhang Lin, Zhu Yi-an, Shi Xian-chen. A hierarchical decision-making method with a fuzzy ant colony algorithm for mission planning of multiple UAVs[J]. Information, 2020, 11(4): No.226. |
| 15 | Michael Faraday. Experimental Researches in Electricity[M]. London: Dover Publications, 2004. |
| 16 | 朱磊,樊继壮,赵杰, 等. 基于栅格法的矿难搜索机器人全局路径规划与局部避障[J]. 中南大学学报:自然科学版, 2011, 42(11): 3421-3428. |
| Zhu Lei, Fan Ji-zhuang, Zhao Jie, et al. Global path planning and local obstacle avoidance of searching robot in mine disasters based on grid method[J]. Journal of Central South University (Science and Technology), 2011, 42(11): 3421-3428. | |
| 17 | Marco D, Gianni D C, Luca M G. Ant algorithms for discrete optimization[J]. Artificial Life, 1999, 5(2): 137-172. |
| 18 | 车翔玖,张孙旻. 基于异步更新策略的蚁群边缘提取算法[J]. 吉林大学学报:工学版, 2017, 47(5): 1577-1582. |
| Che Xiang-jiu, Zhang Sun-min. Edge extraction method based on ant colony asynchronous update strategy[J]. Journal of Jilin University (Engineering and Technology Edition), 2017, 47(5): 1577-1582. | |
| 19 | Yu B, Yang Z Z, Yao B Z. An improved ant colony optimization for vehicle routing problem[J]. Euro-pean Journal of Operational Research, 2009, 196(1): 171-176. |
| 20 | Sande H V, Henrotte F, Hameyer K. The Newton-Raphson method for solving non-linear and anisotropic time-harmonic problems[J]. Compel International Journal for Computation and Mathematics in Electrical and Electronic Engineering, 2004, 23(4): 950-958. |
| 21 | Chen Yong-bo, Luo Guan-chen, Mei Yue-song, et al. UAV path planning using artificial potential field method updated by optimal control theory[J]. International Journal of Systems Science, 2016, 47(5-8): 1407-1420. |
| 22 | Mahamed O, Salah A S. Improved continuous ant colony optimization algorithms for real-world engineering optimization problems[J]. Engineering Applications of Artificial Intelligence, 2019, 85(5): 818-829. |
| 23 | Trivedi R R, Pawaskar D N, Shimpi R P. Enhancement of travel range of electrostatically driven fixed-fixed microbeam in static and dynamic mode using mutated particle swarm optimization[J]. Structural and Multidisciplinary Optimization, 2021, 63(6): 2989-3005. |
| 24 | Chao Luo, Jiang Zhi-peng, Zheng Yuan-jie. A novel reconstructed training-set SVM with roulette cooperative coevolution for financial time series classification[J]. Expert Systems with Applications, 2019, 123(1):283-298. |
| 25 | Mo Pin-qiang, Ma Dan-yang, Zhu Qi-yin. Interpretation of heating and cooling data from thermal cone penetration test using a 1D numerical model and a PSO algorithm[J]. Computers and Geotechnics, 2021, 130(2): 236-248. |
| 26 | Cao Guang-hui, Wang Xing-yuan. Image encryption based on the combination of roulette wheel selection with linear congruence pixel transformation[J]. Multimedia Tools and Applications, 2019, 78(8): 10625-10647. |
| 27 | Qian Wu-wen, Chai Jun-rui, Xu Zeng-guang, et al. Differential evolution algorithm with multiple mutation strategies based on roulette wheel selection[J]. Applied Intelligence, 2018, 48(10): 3612-3629. |
| 28 | Kennedy J, Eberhart R C. Particle swarm optimization[C]∥IEEE International Conference on Neural Networks, Orlando, USA, 1997: 1942-1948. |
| 29 | Kennedy J, Eberhart R C. A discrete binary version of the particle swarm algorithm[C]∥IEEE International Conference on Computational Cybernetics and Simulation, Piscataway, USA, 1997: 4104-4109. |
| 30 | Shorakaei H, Vahdani M, Imani B, et al. Optimal cooperative path planning of unmanned aerial vehicle by a parallel genetic algorithm[J]. Robotic, 2016, 34 (4): 823-836. |
| 31 | Richter C A, Bry A, Roy N. Polynomial trajectory planning for aggressive quadrotor flight in dense in door environments[C]∥Robotics Research, Berlin, Germany, 2016: 649-666. |
| 32 | Wang Bai-lin, Li Tie-ke, Wang Hai-feng, et al. Partheno-genetic algorithm for the permutation flow-shop scheduling problem with maximum waiting times[J]. Applied Mechanics and Materials, 2014, 65(5): 631-632. |
| 33 | Liu L Y, Robin P G. A geometry-independent fine-mesh-based monte carlo importance generator[J]. Nuclear Science and Engineering, 1997, 125(2): 188-195. |
| 34 | Chu Yan-li, Yao Fan, He Yu-yao, et al. An improved multi-node newton iteration search method based on PSO[J]. OPTIK, 2021, 232(5): 169-177. |
| 35 | Cristian D C, Carlos V S, Jesus A L, et al. A cascade hybrid PSO feed-forward neural network model of a biomass gasification plant for covering the energy demand in an AC microgrid[J]. Energy Conversion and Management, 2021, 232(2): 322-338. |
| 36 | Chakraborty T, Banik S K, Bhadra A K, et al. Dynamically learned PSO based neighborhood influenced fuzzy c-means for pre-treatment and post-treatment organ segmentation from CT images[J]. Computer Methods and Programs in Biomedicine, 2021, 202(2): 196-204. |
| 37 | Song Bao-ye, Wang Zi-dong, Zou Lei. An improved PSO algorithm for smooth path planning of mobile robots using continuous high-degree Bezier curve[J]. Applied Soft Computing, 2021, 100(1): 162-174. |
| [1] | 高金武,贾志桓,王向阳,邢浩. 基于PSO-LSTM的质子交换膜燃料电池退化趋势预测[J]. 吉林大学学报(工学版), 2022, 52(9): 2192-2202. |
| [2] | 高金武,王义琳,刘华洋,王艺达. 基于滑模观测器的质子交换膜燃料电池阴极进气系统解耦控制[J]. 吉林大学学报(工学版), 2022, 52(9): 2156-2167. |
| [3] | 李昂,杨泓渊,雷小萌,宋凯文,千承辉. 基于等效连杆模型的六足机器人行进姿态闭环控制[J]. 吉林大学学报(工学版), 2022, 52(7): 1696-1708. |
| [4] | 韩光信,赵聚乐,胡云峰. 控制输入受限的板球系统滚动线性二次型调节器控制[J]. 吉林大学学报(工学版), 2021, 51(6): 1982-1989. |
| [5] | 鲜斌,张诗婧,韩晓薇,蔡佳明,王岭. 基于强化学习的无人机吊挂负载系统轨迹规划[J]. 吉林大学学报(工学版), 2021, 51(6): 2259-2267. |
| [6] | 许芳,张君明,胡云峰,曲婷,曲逸,刘奇芳. 智能车辆路径跟踪横纵向耦合实时预测控制器[J]. 吉林大学学报(工学版), 2021, 51(6): 2287-2294. |
| [7] | 于树友,常欢,孟凌宇,郭洋,曲婷. 基于扰动观测器的轮式移动机器人滚动时域路径跟踪控制[J]. 吉林大学学报(工学版), 2021, 51(3): 1097-1105. |
| [8] | 吴爱国,韩俊庆,董娜. 基于极局部模型的机械臂自适应滑模控制[J]. 吉林大学学报(工学版), 2020, 50(5): 1905-1912. |
| [9] | 王伟,赵健廷,胡宽荣,郭永仓. 基于快速非奇异终端滑模的机械臂轨迹跟踪方法[J]. 吉林大学学报(工学版), 2020, 50(2): 464-471. |
| [10] | 刘富,安毅,董博,李元春. 基于ADP的可重构机械臂能耗保代价分散最优控制[J]. 吉林大学学报(工学版), 2020, 50(1): 342-350. |
| [11] | 曲兴田,王学旭,孙慧超,张昆,闫龙威,王宏一. 熔融沉积成型技术3D打印机加热系统的模糊自适应PID控制[J]. 吉林大学学报(工学版), 2020, 50(1): 77-83. |
| [12] | 马常友, 高海波, 丁亮, 于海涛, 邢宏军, 邓宗全. 机器人末端执行器自更换机构设计及对接策略[J]. 吉林大学学报(工学版), 2019, 49(6): 2027-2037. |
| [13] | 马苗苗,潘军军,刘向杰. 含电动汽车的微电网模型预测负荷频率控制[J]. 吉林大学学报(工学版), 2019, 49(5): 1644-1652. |
| [14] | 于树友,谭雷,王伍洋,陈虹. 基于三步法的汽车主动四轮转向控制[J]. 吉林大学学报(工学版), 2019, 49(3): 934-942. |
| [15] | 温海营,任翔,徐卫良,丛明,秦文龙,胡书海. 咀嚼机器人颞下颌关节仿生设计及试验测试[J]. 吉林大学学报(工学版), 2019, 49(3): 943-952. |
|