吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (11): 3221-3228.doi: 10.13229/j.cnki.jdxbgxb.20220976
在障碍物检测时对斜坡点云的检测处理算法
蒋林1,2( ),杨立1,张文俊3,张琼玉3,吴艳霞3
),杨立1,张文俊3,张琼玉3,吴艳霞3
- 1.武汉科技大学 冶金装备及其控制教育部重点实验室,武汉 430081
2.武汉科技大学 机器人与智能系统研究院,武汉 430081
3.立得空间信息技术股份有限公司,武汉 430073
Detection and processing algorithm of slope point cloud in obstacle detection
Lin JIANG1,2(),Li YANG1,Wen-jun ZHANG3,Qiong-yu ZHANG3,Yan-xia WU3
- 1.Key Laboratory of Metallurgical Equipment and Control Technology,Ministry of Education,Wuhan University of Science and Technology,Wuhan 430081,China
2.Institute of Robotics and Intelligent Systems,Wuhan University of Science and Technology,Wuhan 430081,China
3.Leador Spatial Information Technology Co. ,Ltd. ,Wuhan 430073,China
摘要:
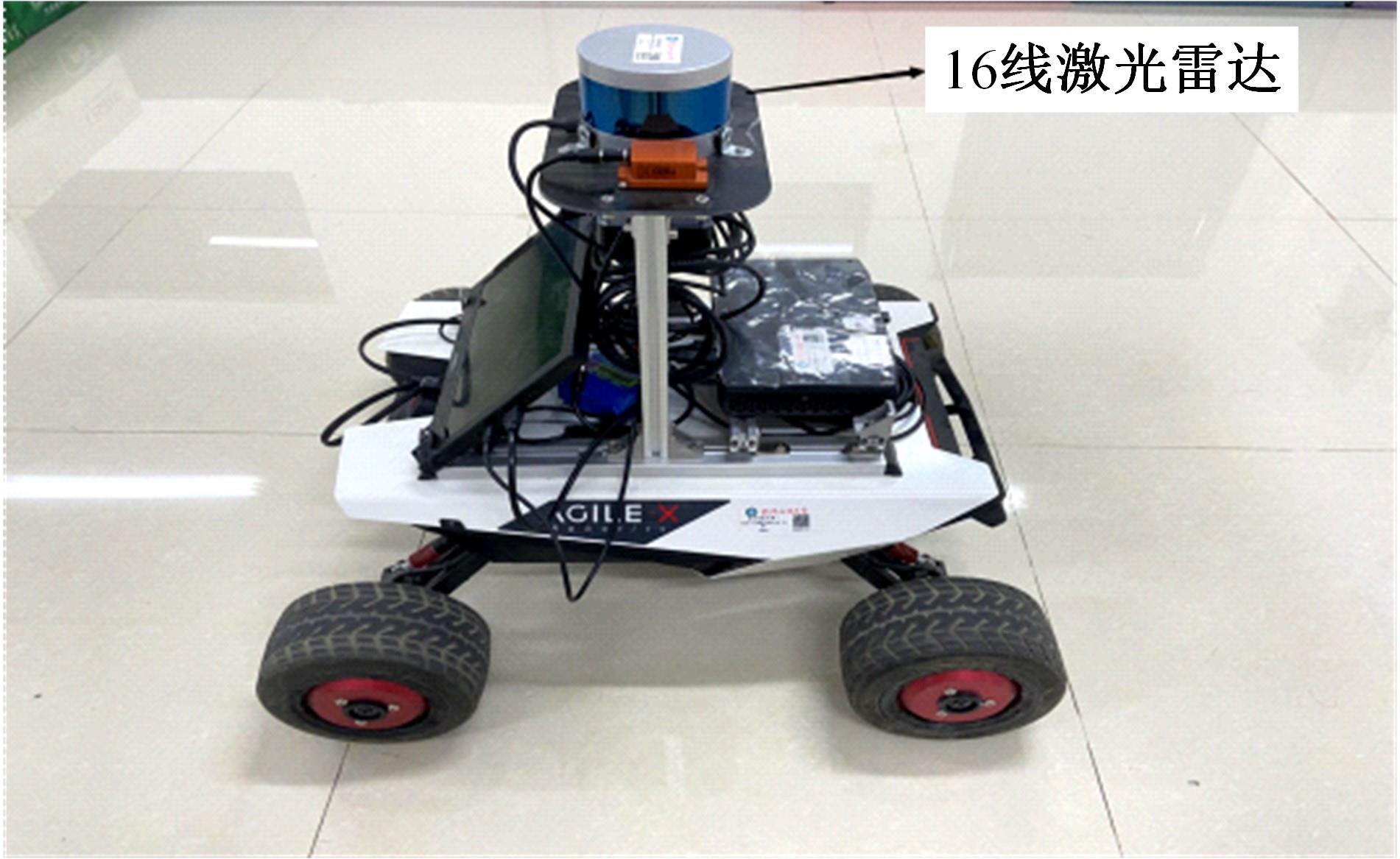
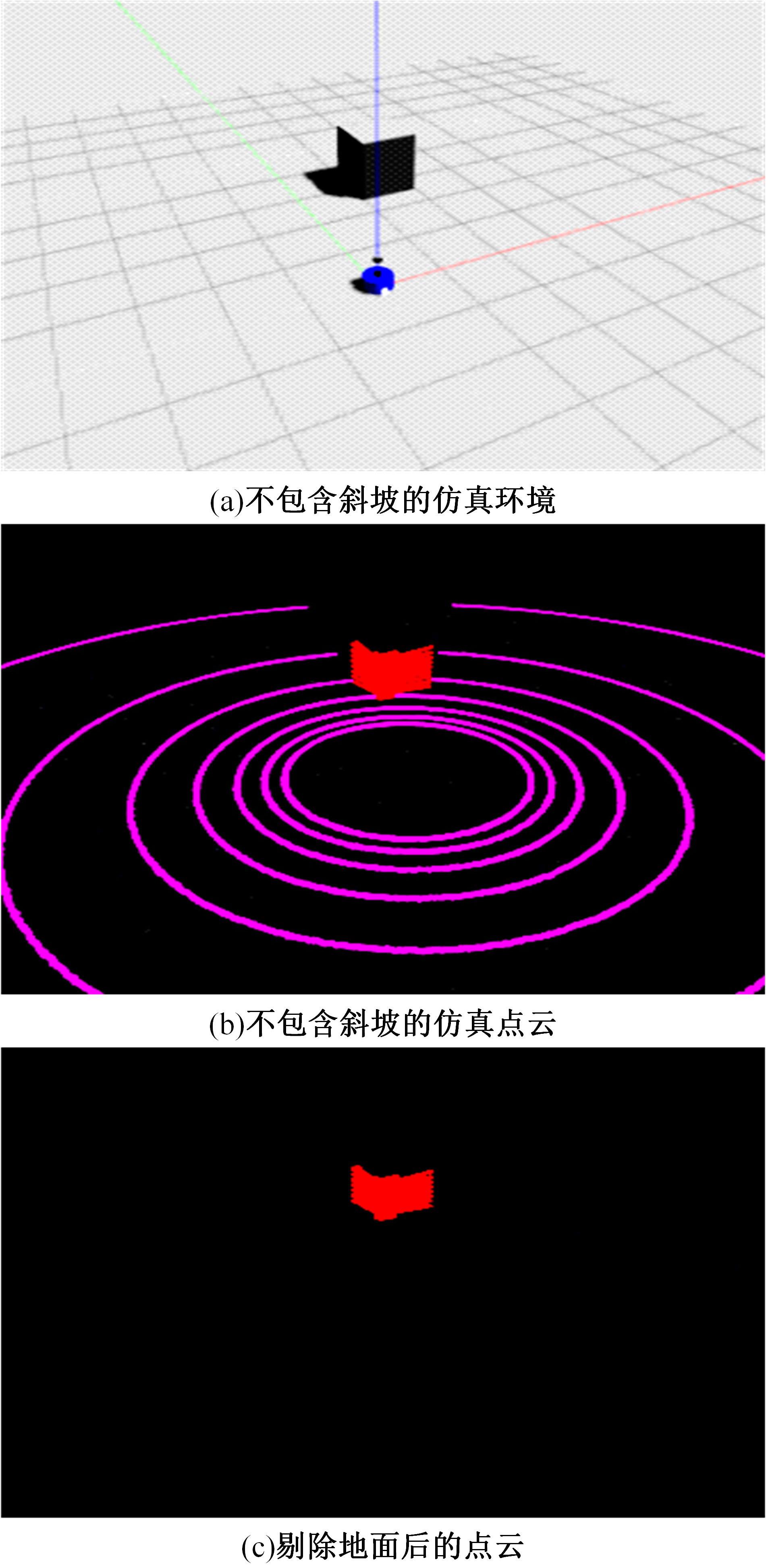
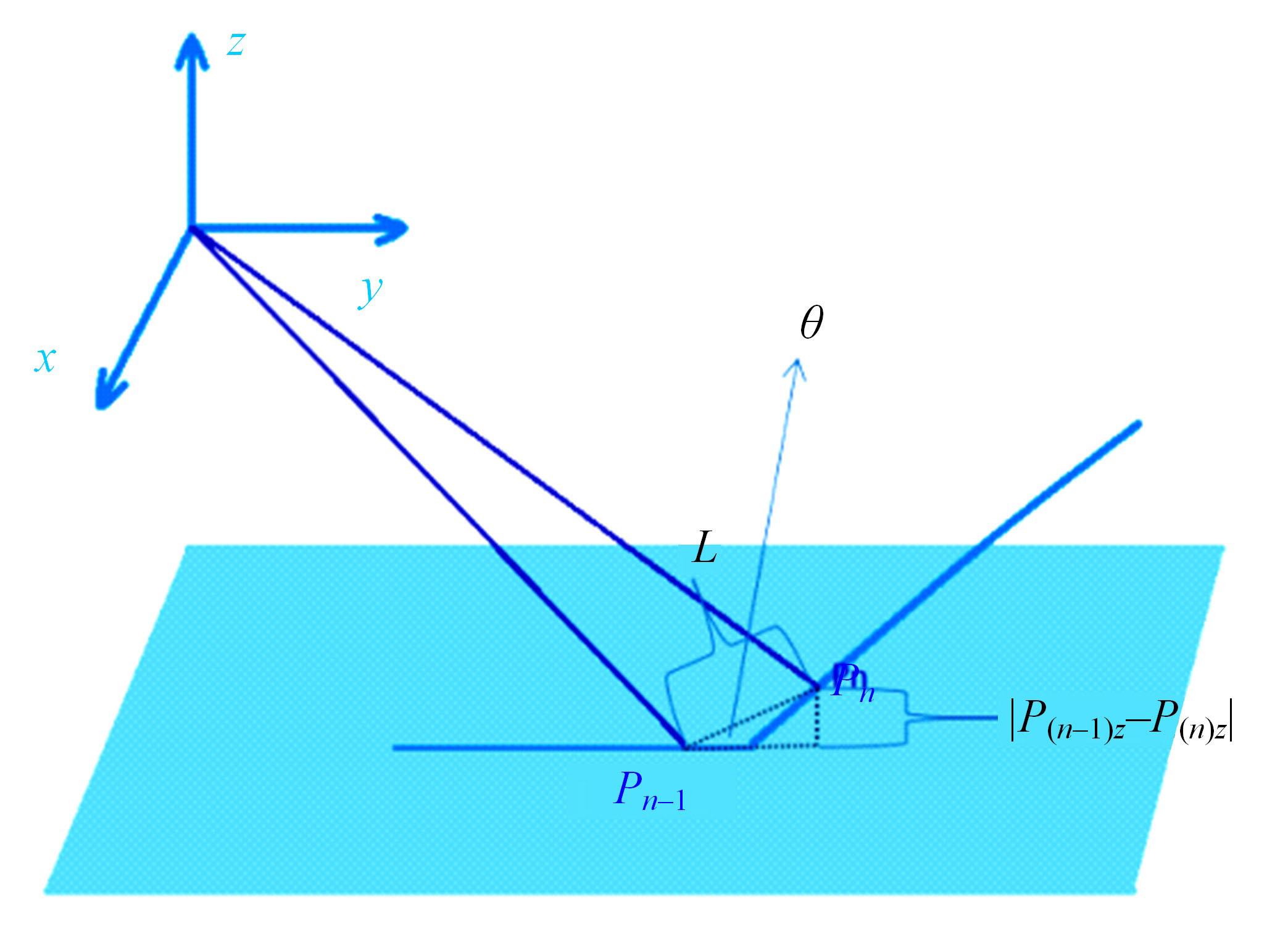
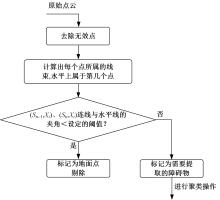
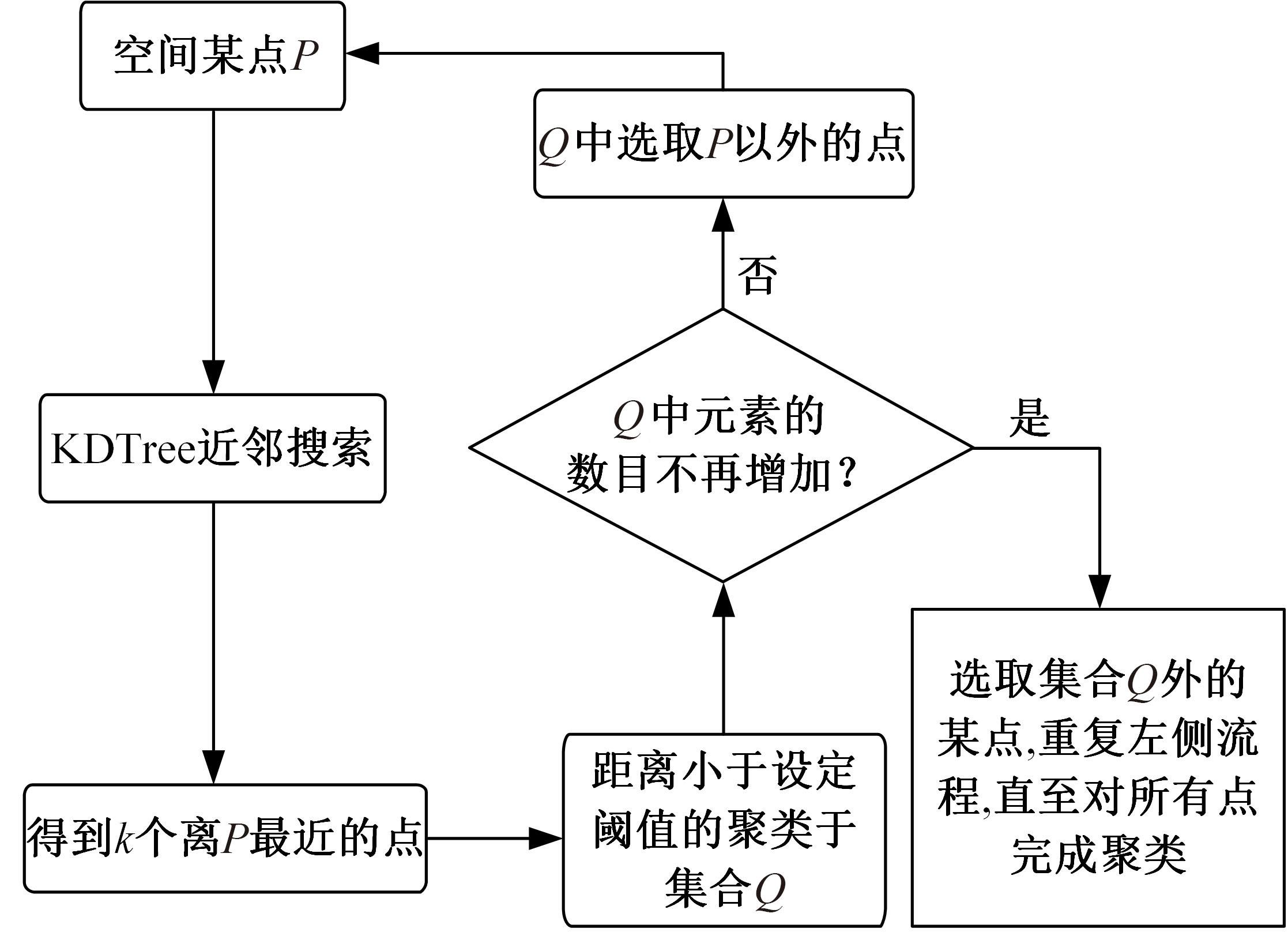
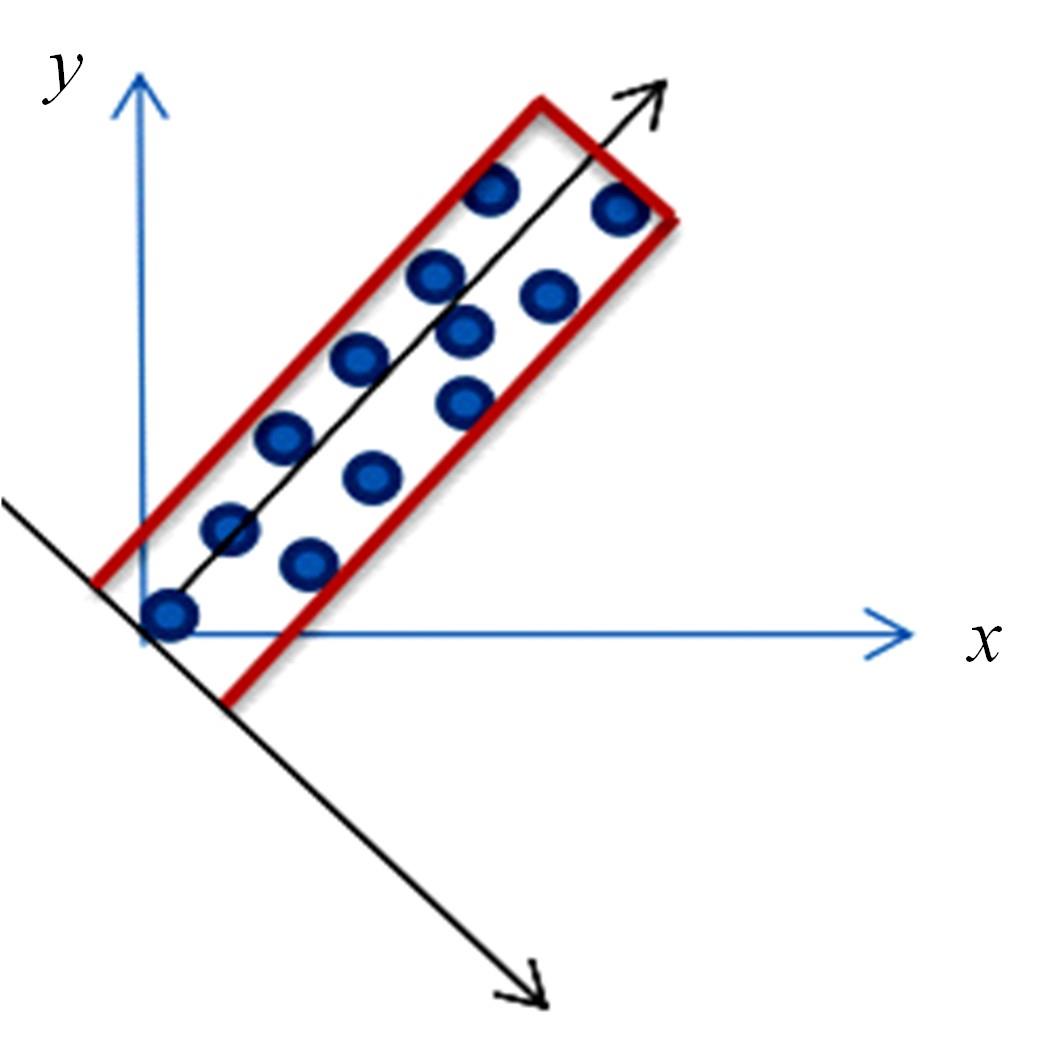
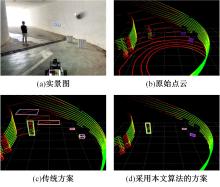
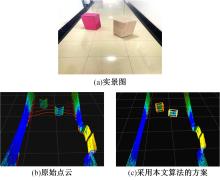
室外移动机器人在包含斜坡路面的环境下进行障碍物检测时,采用传统的RANSAC地面点云剔除算法会出现无法剔除斜坡点云的现象,导致后续将斜坡识别成障碍物。针对这一情况,本文提出了一种相邻线束算法来检测和剔除斜坡点云,并基于欧式聚类对障碍物进行检测。该方案首先对三维激光点云进行预处理,根据三维激光雷达相邻线束之间的几何关系分割出包含斜坡的地面点云,再经过体素滤波进行下采样后,对分割出的障碍物点云进行基于KDTree的欧式聚类,并通过PCA主成分分析计算出外接包围框的尺寸和方向来对障碍物进行检测。经过实验表明:采用本文提出的障碍物检测算法能有效分割出环境中的斜坡路面,在聚类过程中能够避免将斜坡路面识别为障碍物,为机器人自主行走避障策略提供基础。
中图分类号:
- TP391.9
















| 1 | 王金强, 黄航, 郅朋, 等. 自动驾驶发展与关键技术综述[J]. 电子技术应用, 2019, 45(6): 28-36. |
| Wang Jin-qiang, Huang Hang, Zhi Peng, et al. Overview of autonomous driving development and key technologies[J]. Applications of Electronics, 2019,45(6): 28-36. | |
| 2 | Xiang Y, Yang X Q, Yang W W, et al. Localization and mapping algorithm for the indoor mobile robot based on lidar[J]. IOP Conference Series Materials Science and Engineering, 2020, 831(1): 012021. |
| 3 | Atiyah A N, Adzhar N, Jaini N I. An overview: onpath planning optimization criteria and mobile robot navigation[J]. Journal of Physics: Conference Series, 2021, 1988: 012036. |
| 4 | 孔德明, 段呈新, 巴特·古森斯, 等. 基于车载16线激光雷达的障碍物检测方法[J]. 计量学报, 2021, 42(7): 846-852. |
| Kong De-ming, Duan Cheng-xin, Goossens Butter, et al. Obstacle detection method based on vehicle-borne 16-line lidar[J]. Journal of Metrology, 2021, 42(7): 846-852. | |
| 5 | 邓淇天. 基于激光雷达和视觉传感器融合的障碍物识别技术研究[D]. 南京: 东南大学仪器科学与工程学院, 2019. |
| Deng Qi-tian. Research on obstacle recognition technology based on fusion of lidar and vision sensor[D]. Nanjing: School of Instrument Science and Engineering, Southeast University, 2019. | |
| 6 | 赵夫群, 马玉, 戴翀. 基于改进随机抽样一致的点云分割算法[J]. 科学技术与工程, 2021, 21(22): 9455-9460. |
| Zhao Fu-qun, Ma Yu, Dai Chong. Point cloud segmentation algorithm based on improved RANSAC[J]. Science, Technology and Engineering, 2021, 21(22): 9455-9460. | |
| 7 | Zermas D, Izzat I, Papanikolopoulos N. Fast segmentation of 3D point clouds: a paradigm on lidar data for autonomous vehicle applications[C]∥IEEE International Conference on Robotics and Automation, Singapore, 2017: 79-86. |
| 8 | Wen M Y, Cho S, Chae J, et al. Range image-based density-based spatial clustering of applicationwith noise clustering method of three-dimensional point clouds[J]. International Journal of Advanced Robotic Systems, 2018, 15(2): 18762302. |
| 9 | Liu S X, Liu X D. Research on density-based k-means clustering algorithm[J]. Journal of Physics: Conference Series, 2021, 2137: 012071. |
| 10 | 孔栋, 王晓原, 刘亚奇, 等. 基于车载32线激光雷达点云的车辆目标识别算法[J]. 科学技术与工程, 2018, 18(5): 81-85. |
| Kong Dong, Wang Xiao-yuan, Liu Ya-qi, et al. Vehicle target recognition algorithm based on 32-line lidar point cloud[J]. Science, Technology and Engineering, 2018,18(5): 81-85. | |
| 11 | Schnabel R, Wahl R, Klein R. Eifficient RANSAC for point cloud shapedetection[J]. Computer Graphics Forum, 2007, 26(2): 214-226. |
| 12 | 范晶晶, 王力, 褚文博, 等. 基于KDTree树和欧式聚类的越野环境下行人识别的研究[J]. 汽车工程, 2019, 41(12): 1410-1415. |
| Fan Jing-jing, Wang Li, Chu Wen-bo, et al. Research on pedestrian recognition in off-road environment based on KDTree tree and European clustering[J]. Automotive Engineering, 2019, 41(12): 1410-1415. | |
| 13 | 王育坚, 廉腾飞, 吴明明, 等. 基于八叉树与KD树索引的点云配准方法[J]. 测绘工程, 2017, 26(8): 35-40. |
| Wang Yu-jian, Lian Teng-fei, Wu Ming-ming, et al. Point cloud registration method based on Octree and KD tree index[J]. Mapping Engineering, 26(8): 35-40. | |
| 14 | 杨帆. 基于B+树存储的AABB包围盒碰撞检测算法[J]. 计算机科学, 2021, 48(): 331-333. |
| Yang Fan. Collision detection algorithm of AABB bounding box based on B-tree storage[J]. Computer Science, 2021, 48(Sup.1): 331-333. | |
| 15 | 王晓洁, 周元峰, 潘晓, 等. 一种鲁棒的三维点云骨架提取方法[J]. 中国科学: 信息科学, 2017, 47(7): 832-845. |
| Wang Xiao-jie, Zhou Yuan-feng, Pan Xiao, et al. A robust method for 3D point cloud skeleton extraction[J]. Chinese Science: Information Science, 2017, 47(7): 832-845. |
| [1] | 陈淑江,徐春望,路长厚,王康. 嵌入控制油腔的静压主轴轴心运动主动控制分析与试验[J]. 吉林大学学报(工学版), 2023, 53(4): 973-981. |
| [2] | 蒋林,周玲,赵慧. 液压伺服柔驱机构设计及其刚度连续可调分析[J]. 吉林大学学报(工学版), 2022, 52(7): 1499-1508. |
| [3] | 杨志军,高忠义,王丽君,黄观新,危宇泰. 面向刚柔耦合定位平台的模型预测控制算法[J]. 吉林大学学报(工学版), 2022, 52(12): 2806-2815. |
| [4] | 胡鹏,朱建新,刘昌盛,张大庆. 液压挖掘机动臂势能交互回收利用系统特性[J]. 吉林大学学报(工学版), 2022, 52(10): 2256-2264. |
| [5] | 李学勇,赵仲秋,张春松,路长厚. 基于有限元的人体⁃机械手交互力计算方法[J]. 吉林大学学报(工学版), 2021, 51(5): 1612-1619. |
| [6] | 施昕昕,黄家才,高芳征. 基于分数阶BICO滤波器的运动控制测量噪声抑制[J]. 吉林大学学报(工学版), 2021, 51(5): 1873-1878. |
| [7] | 于萍,穆特,朱黎辉,周子业,宋杰. 钻具输送装置非线性动力学分析及稳定性控制[J]. 吉林大学学报(工学版), 2021, 51(3): 820-830. |
| [8] | 姜继海,赵存然,张冠隆,车明阳. 航空煤油柱塞泵摩擦副涂层材料摩擦性能[J]. 吉林大学学报(工学版), 2021, 51(1): 147-153. |
| [9] | 胡明伟,王洪光,潘新安. 基于正交设计的协作机器人全域结构优化设计[J]. 吉林大学学报(工学版), 2021, 51(1): 370-378. |
| [10] | 宗长富,文龙,何磊. 基于欧几里得聚类算法的三维激光雷达障碍物检测技术[J]. 吉林大学学报(工学版), 2020, 50(1): 107-113. |
| [11] | 王新竹, 李骏, 李红建, 尚秉旭. 基于三维激光雷达和深度图像的自动驾驶汽车障碍物检测方法[J]. 吉林大学学报(工学版), 2016, 46(2): 360-365. |
| [12] | 刘昌盛, 何清华, 张大庆, 李铁辉, 龚俊, 赵喻明. 混合动力挖掘机势能回收系统参数优化与试验[J]. 吉林大学学报(工学版), 2014, 44(2): 379-386. |
| [13] | 龚俊, 何清华, 张大庆, 张云龙, 刘昌盛, 唐中勇. 混合动力叉车节能效果评价及能量回收系统试验[J]. 吉林大学学报(工学版), 2014, 44(01): 29-34. |
|