吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (3): 700-710.doi: 10.13229/j.cnki.jdxbgxb.20220465
• 交通运输工程·土木工程 • 上一篇
自动驾驶车辆换道决策行为分析及分子动力学建模
曲大义1( ),张可琨1,顾原2,王韬1,3,宋慧1,戴守晨1
),张可琨1,顾原2,王韬1,3,宋慧1,戴守晨1
- 1.青岛理工大学 机械与汽车工程学院,山东 青岛 266520
2.中国第一汽车集团有限公司 营销中心,长春 130012
3.淄博职业技术大学 人工智能与大数据学院,山东 淄博 255300
Analysis of lane⁃changing decision⁃making behavior and molecular dynamics modeling for autonomous vehicles
Da-yi QU1(),Ke-kun ZHANG1,Yuan GU2,Tao WANG1,3,Hui SONG1,Shou-chen DAI1
- 1.School of Mechanical and Automotive Engineering,Qingdao University of Technology,Qingdao 266520,China
2.Marketing Center,China FAW Group Co. ,Ltd. ,Changchun 130012,China
3.School of Artificial Intelligence and Big Data,Zibo Vocational and Technical College,Zibo 255300,China
摘要:
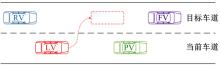
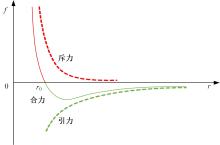
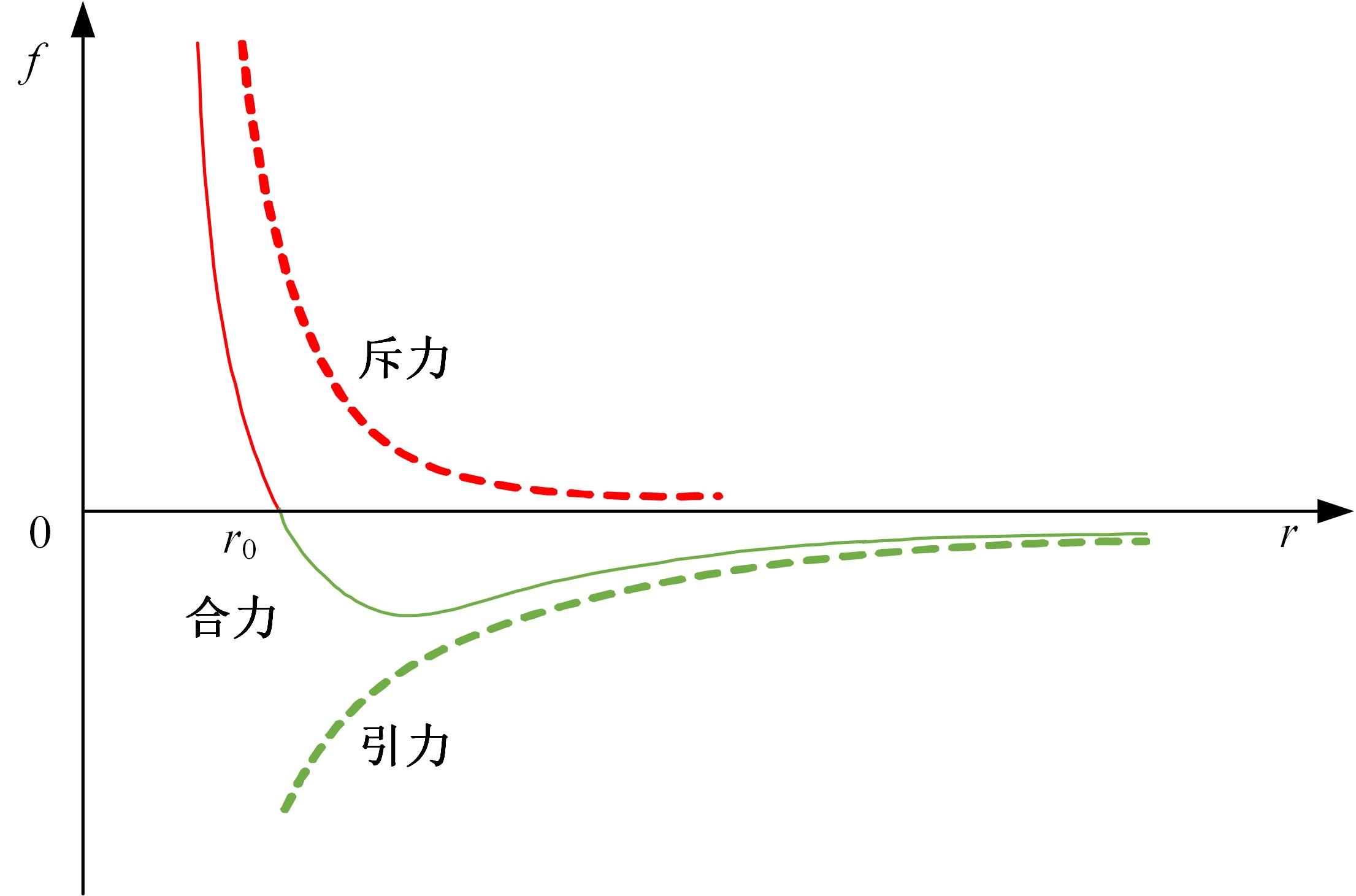
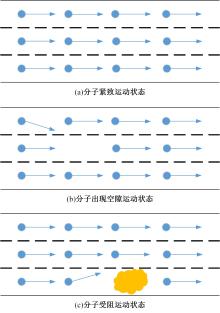
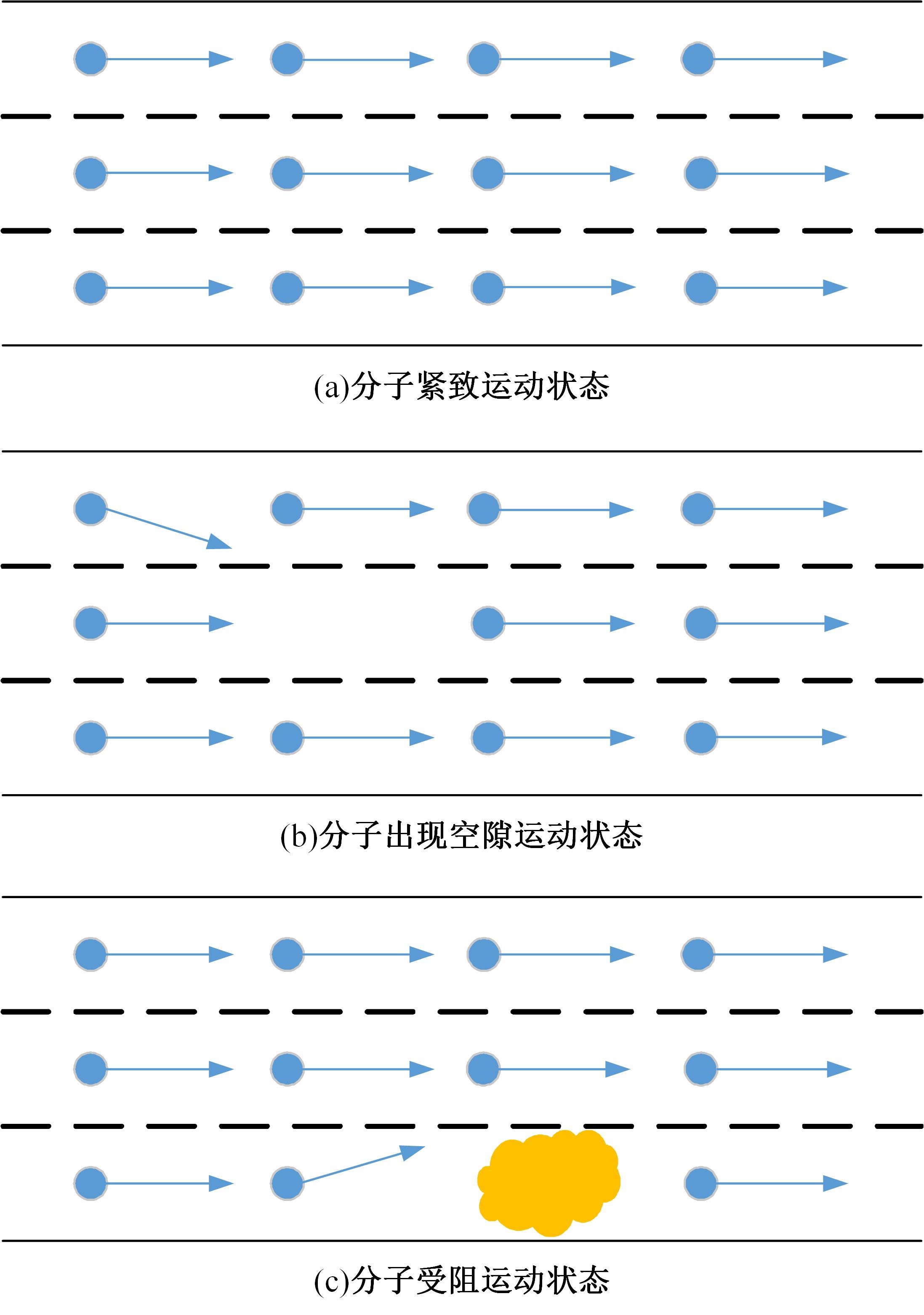
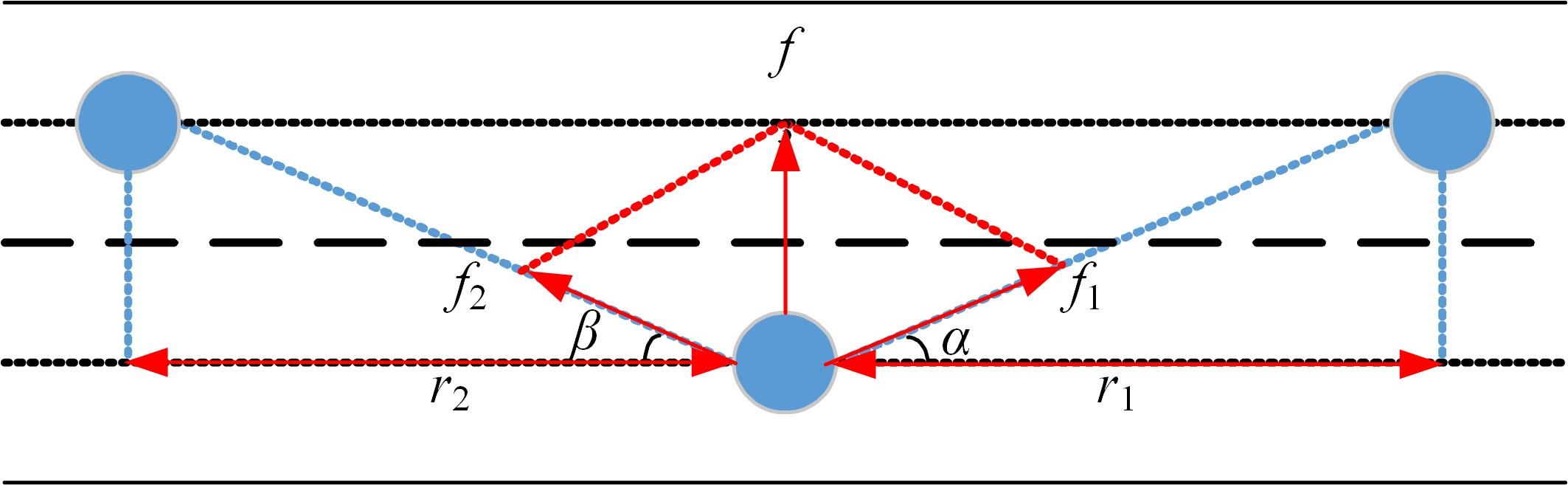
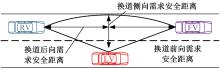
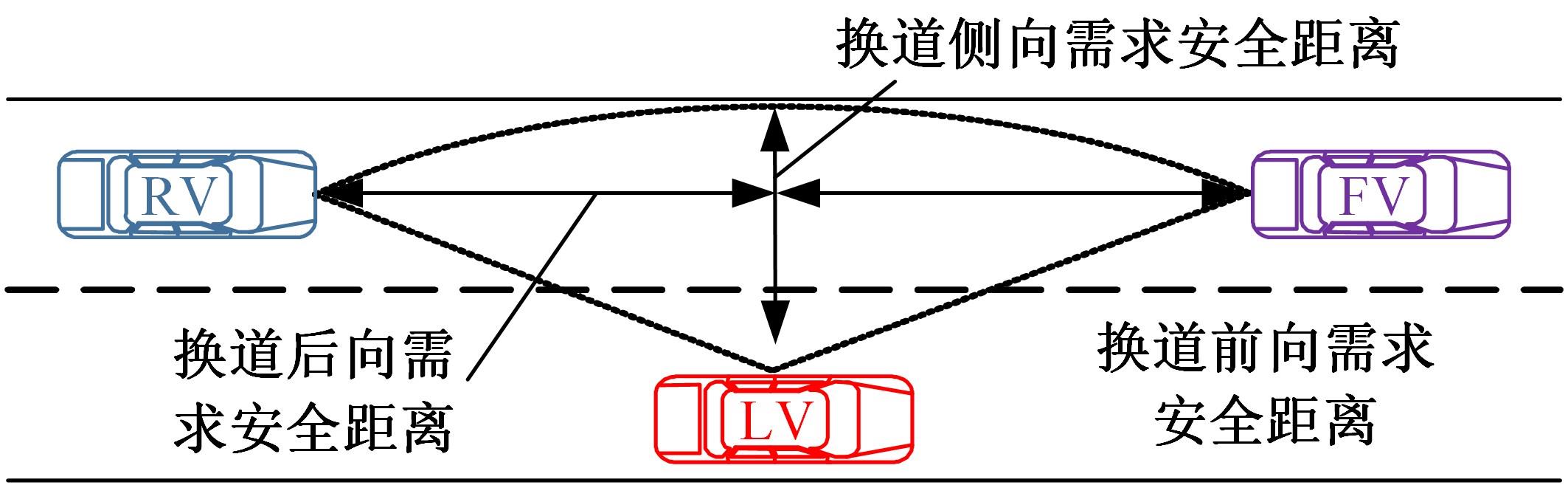
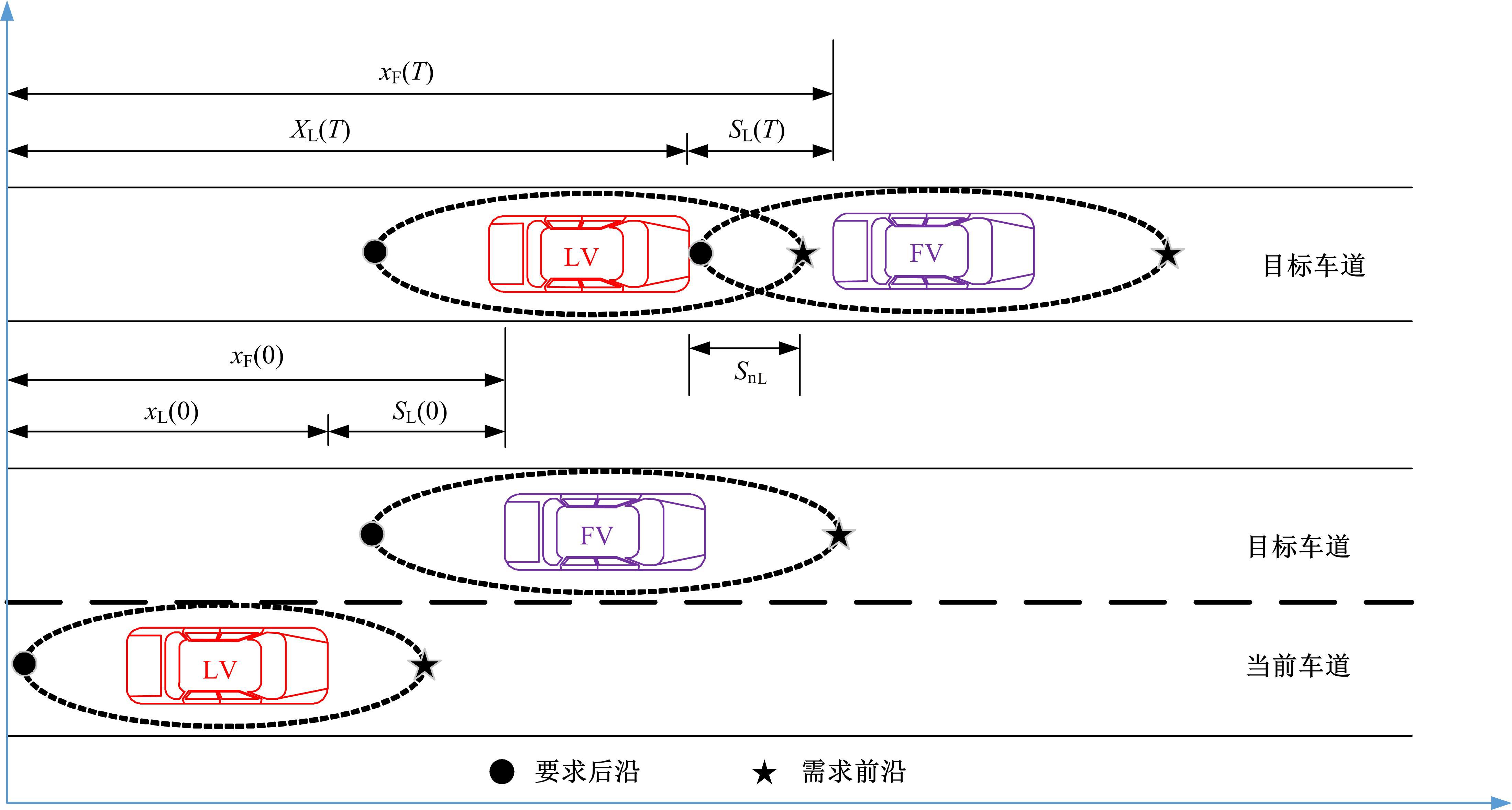
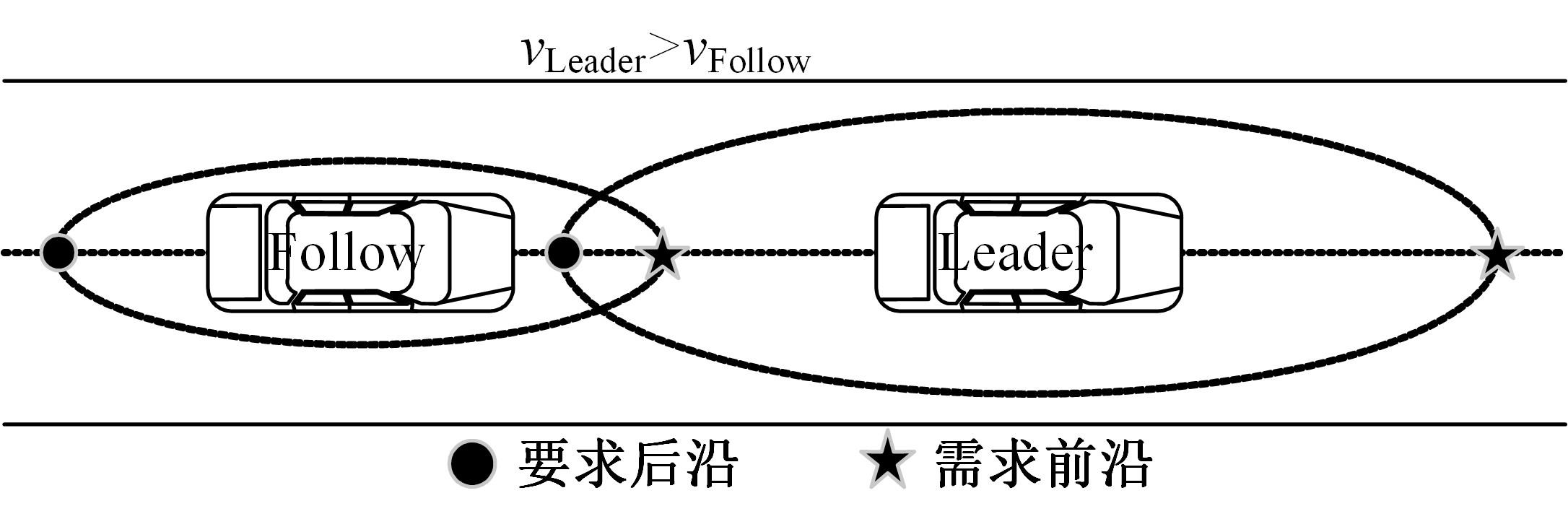
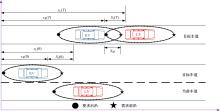
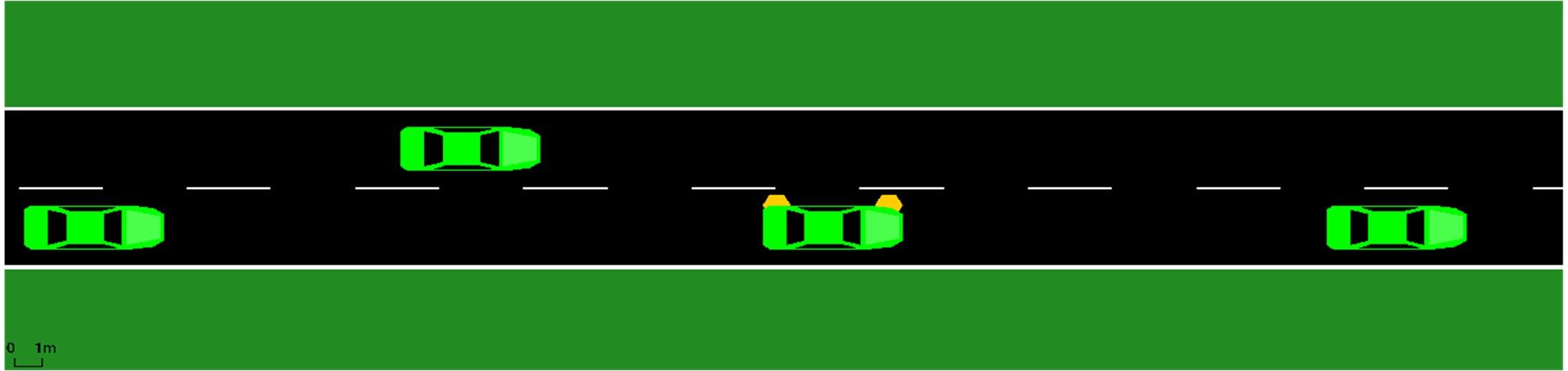
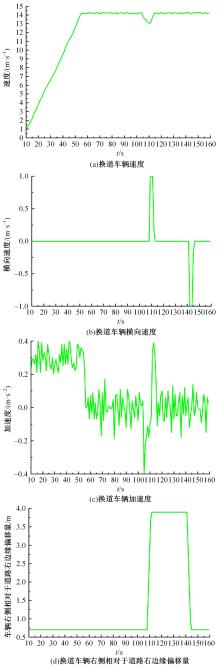
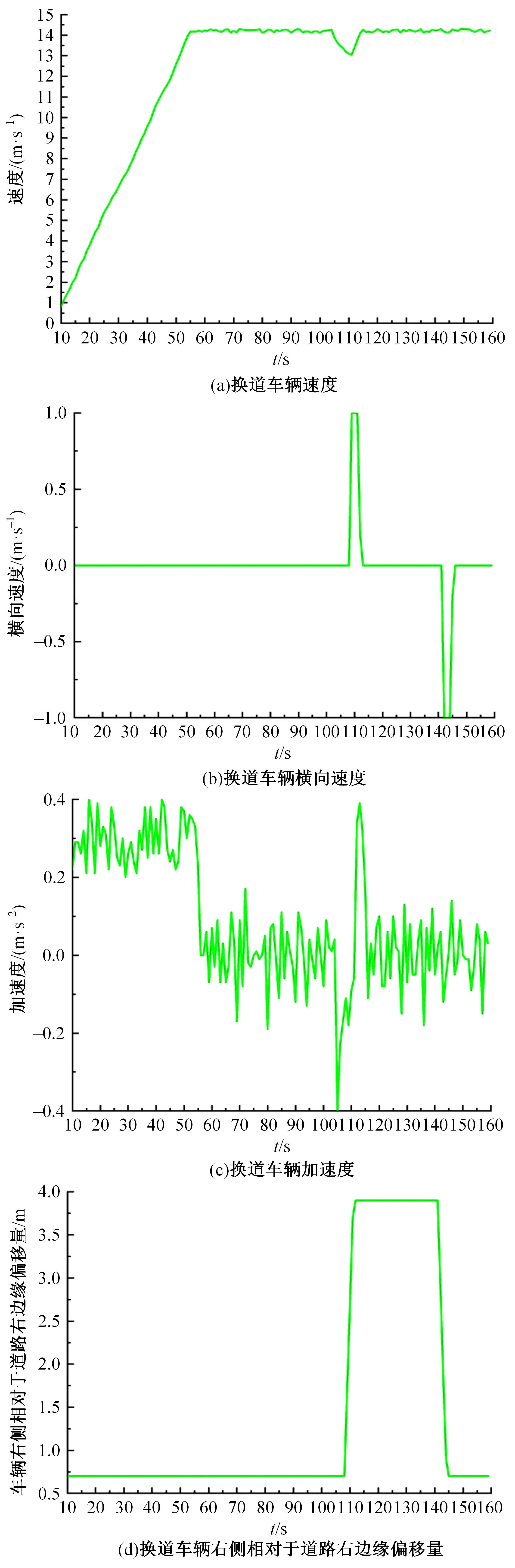
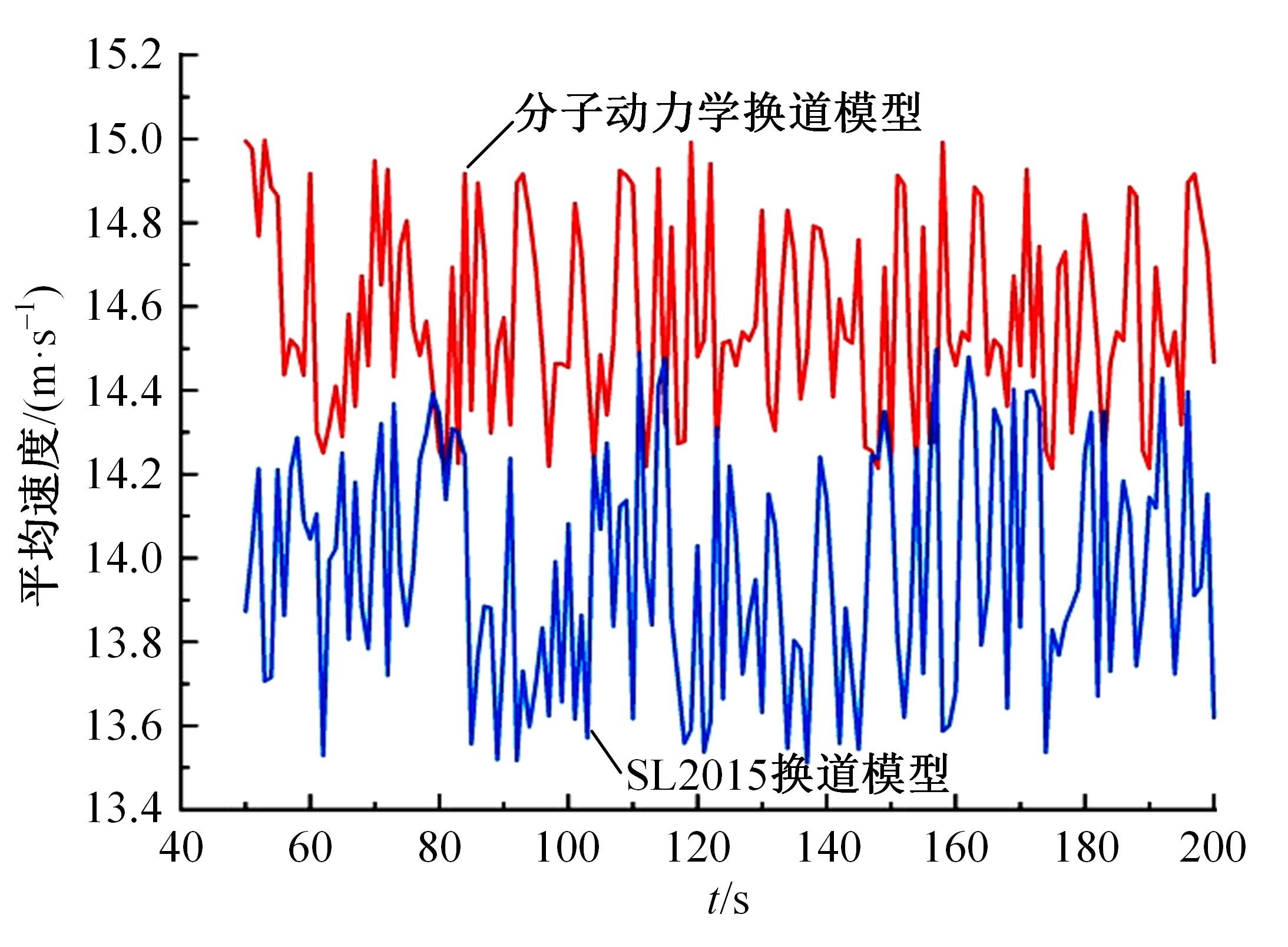
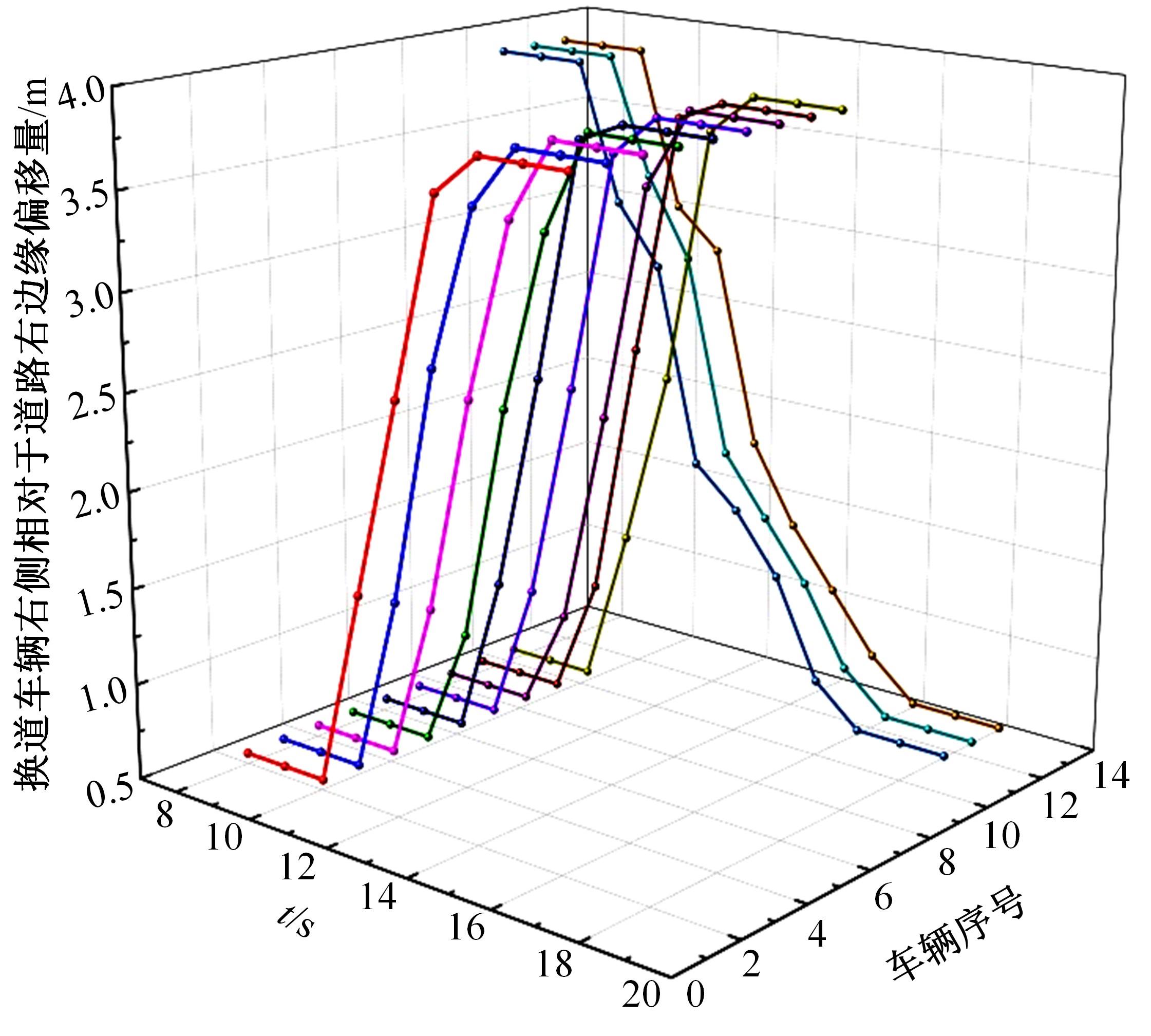
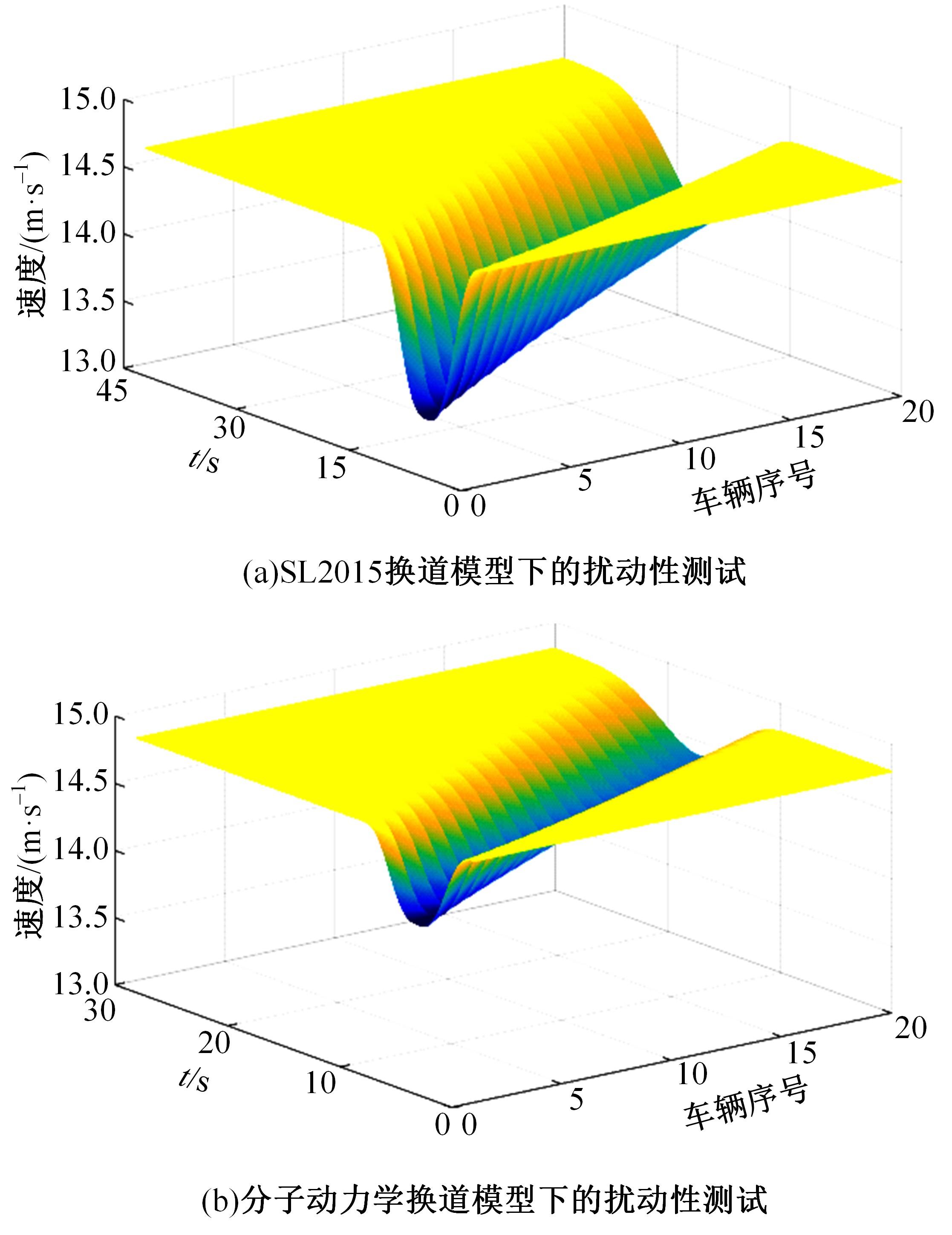
针对自动驾驶车辆的换道决策行为,首先基于分子动力学理论研究了车辆的微观换道行为,在对换道意图进行客观性量化的基础上,进一步引入车辆间的相互作用势建立了换道决策行为的分子动力学模型。然后,系统分析了车辆换道初始时刻与换道完成时刻的关系以及车辆换道的动态影响因素,探究了微观车辆的换道行为对宏观车流的影响。最后,使用SUMO软件将SL2015换道模型与分子动力学换道模型进行仿真对比分析。结果表明,分子动力学换道模型具有较好的安全性、稳定性和实用性;本文自动驾驶车辆换道决策行为的分子动力学建模综合考虑了交通场景中的动态影响因素,能够更客观、合理地展现自动驾驶车辆的换道行为特性。
中图分类号:
- U491.2




| 1 | Gipps P G. A model for the structure of lane changing decisions[J]. Transportation Research Part B: Methodological, 1986, 20(5): 403-414. |
| 2 | Jula H, Kosmatopoulos E B, Ioannou P A. Collision avoidance analysis for lane changing and merging[J]. IEEE Transactions on Vehicular Technology, 2000, 49(6): 2295-2308. |
| 3 | Kanaris A, Kosmatopoulos E B, Loannou P A. Strategies and spacing requirements for lane changing and merging in automated highway systems[J]. IEEE Transactions on Vehicular Technology, 2001, 50(6): 1568-1581. |
| 4 | 郭海兵, 曲大义, 洪家乐, 等. 基于效用理论的车辆换道交互行为及决策模型[J]. 科学技术与工程, 2020, 20(29): 12185-12190. |
| Guo Hai-bing, Qu Da-yi, Hong Jia-le, et al. Vehicle lane changing interaction behavior and decision model based on utility theory[J]. Science Technology and Engineering, 2020, 20(29): 12185-12190. | |
| 5 | 李传友. 高速公路环境下智能车辆自动换道研究[D]. 西安: 长安大学汽车学院, 2019. |
| Li Chuan-you. Research on intelligent vehicle automatic lane change in expressway environment[D]. Xi'an: College of Automobile, Chang'an University, 2019. | |
| 6 | 曲大义, 黑凯先, 郭海兵, 等. 车联网环境下车辆换道博弈行为及模型[J]. 吉林大学学报:工学版, 2022, 52(1): 101-109. |
| Qu Da-yi, Kai-xian Hei, Guo Hai-bing, et al. Game behavior and model of lane-changing on the Internet of vehicles environment[J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(1): 101-109. | |
| 7 | Reuschel A. Vehicle movements in a platoon[J]. Oesterreichisches Ingenieeur-Atchir, 1950, 4(1): 193-215. |
| 8 | 杨晶茹. 车路协同环境下驾驶行为特性及其模型[D]. 青岛: 青岛理工大学机械与汽车工程学院, 2019. |
| Yang Jing-ru. Driving behavior characteristics and models under vehicle-infrastructure cooperation[D]. Qingdao: School of Mechanical and Automotive Engineering, Qingdao University of Technology, 2019. | |
| 9 | 黑凯先, 曲大义, 郭海兵, 等. 网联混合车流车辆换道博弈行为及模型[J]. 科学技术与工程, 2021, 21(6): 2495-2501. |
| Kai-xian Hei, Qu Da-yi, Guo Hai-bing, et al. Modeling lane-changing behavior in mixed traffic flow connected environment based on game behavior[J]. Science Technology and Engineering, 2021, 21(6): 2495-2501. | |
| 10 | 文成. 耦合博弈论—运动学的自动驾驶换道决策研究[D]. 成都: 西南交通大学交通运输与物流学院, 2019. |
| Wen Cheng. Coupled game theory-kinematics decision making for automatic driving lane change[D]. Chengdu: School of Transportation and Logistics of Southwest Jiaotong University, 2019. | |
| 11 | 杨龙海, 王晖, 李帅, 等. 改进分子动力学的车辆跟驰模型[J]. 重庆大学学报, 2021, 44(7): 26-33. |
| Yang Long-hai, Wang Hui, Li Shuai, et al. Car-following model with improved molecular dynamics[J]. Journal of Chongqing University, 2021, 44(7): 26-33. | |
| 12 | 黎宇科, 刘宇. 国内智能网联汽车发展现状及建议[J]. 汽车与配件, 2016, 2016(41): 56-59. |
| Li Yu-ke, Liu Yu. Development status and suggestions of domestic intelligent connected vehicles[J]. Automobile and Parts, 2016, 2016(41): 56-59. | |
| 13 | 孟鑫. 混合车流环境下城市快速路交织区仿真研究[D]. 长春: 吉林大学交通学院, 2019. |
| Meng Xin. Research on the simulation of the weaving area on the urban expressway under the mixed traffic environment[D]. Changchun: College of Transportation, Jilin University, 2019. | |
| 14 | 时柏营, 杨晓光, 于晓斐. 考虑与跟驰模型结合的自由换道模型及仿真[J]. 交通科学与工程, 2009, 25(4): 91-96. |
| Shi Bai-ying, Yang Xiao-guang, Yu Xiao-fei. Modeling and simulation of discretionary lane-change considering the combination with the car-following model[J]. Journal of Transport Science and Engineering, 2009, 25(4): 91-96. | |
| 15 | 曲大义, 邴其春, 贾彦峰, 等. 基于分子动力学的车辆换道交互行为特性及其模型[J]. 交通运输系统工程与信息, 2019, 19(3): 68-74. |
| Qu Da-yi, Bing Qi-chun, Jia Yan-feng, et al. Molecular dynamics characteristics and models of vehicle lane changing interaction behavior[J]. Journal of Transportation Systems Engineering and Information Technology, 2019, 19(3): 68-74. | |
| 16 | 李娟, 曲大义, 刘聪, 等. 基于分子动力学的跟驰特性及其模型[J]. 公路交通科技, 2018, 35 (03): 126-131. |
| Li Juan, Qu Da-yi, Liu Cong, et al. Car-following characteristics and its models based on molecular dynamics[J]. Journal of Highway and Transportation Research and Development, 2018, 35(3): 126-131. | |
| 17 | 曲大义, 赵梓旭, 贾彦峰, 等. 基于Lennard-Jones势的车辆跟驰动力学特性及模型[J]. 吉林大学学报:工学版, 2022, 52(11): 2549-2557. |
| Qu Da-yi, Zhao Zi-xu, Jia Yan-feng, et al. Car-following dynamics characteristics and model based on Lennard-Jones potential[J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(11): 2549-2557. | |
| 18 | 李娟. 基于分子动力学的车流运行特性及其模型研究[D]. 青岛: 青岛理工大学汽车与交通学院, 2018. |
| Li Juan. Study on traffic flow characteristics and its model based on molecular dynamics[D]. Qingdao: School of Automobile and Transportation, Qingdao University of Technology, 2018. | |
| 19 | Erdmann Jakob. Modeling Mobility with Open Data[M]. USA: Springer International Publishing, 2015: 105-123. |
| 20 | 包智鹏, 支永帅, 张素民, 等. 基于BiGRU的多模态驾驶行为及轨迹预测[J]. 大连理工大学学报, 2021, 61(3): 246-254. |
| Bao Zhi-peng, Zhi Yong-shuai, Zhang Su-min, et al. BIGRU based multi-modal maneuvers and trajectory prediction[J]. Journal of Dalian University of Technology, 2021, 61(3): 246-254. | |
| 21 | 曲大义, 杨建, 陈秀锋, 等. 车辆跟驰的分子动力学特性及其模型[J]. 吉林大学学报:工学版, 2012, 42(5): 1198-1202. |
| Qu Da-yi, Yang Jian, Chen Xiu-feng, et al. Molecular kinetics behavior of car-following and its model[J]. Journal of Jilin University(Engineering and Technology Edition), 2012, 42(5): 1198-1202. |
| [1] | 严利鑫,冯进培,郭军华,龚毅轲. 不同险态情景下共驾型智能车辆接管行为特征分析[J]. 吉林大学学报(工学版), 2024, 54(3): 683-691. |
| [2] | 赵胜前,丛卓红,游庆龙,李源. 沥青-集料黏附和剥落研究进展[J]. 吉林大学学报(工学版), 2023, 53(9): 2437-2464. |
| [3] | 张健,李青扬,李丹,姜夏,雷艳红,季亚平. 基于深度强化学习的自动驾驶车辆专用道汇入引导[J]. 吉林大学学报(工学版), 2023, 53(9): 2508-2518. |
| [4] | 郑植,袁佩,金轩慧,魏思斯,耿波. 桥墩复合材料柔性防撞护舷试验[J]. 吉林大学学报(工学版), 2023, 53(9): 2581-2590. |
| [5] | 李洪涛,王琳虹,李俊达. 公路交叉口照明和限速对视觉搜索能力的影响[J]. 吉林大学学报(工学版), 2023, 53(8): 2287-2297. |
| [6] | 李建华,王泽鼎. 考虑路径耗时的城市汽车分布式充电桩选点规划[J]. 吉林大学学报(工学版), 2023, 53(8): 2298-2303. |
| [7] | 巫威眺,曾坤,周伟,李鹏,靳文舟. 基于多源数据和响应面优化的公交客流预测深度学习方法[J]. 吉林大学学报(工学版), 2023, 53(7): 2001-2015. |
| [8] | 何永明,陈世升,冯佳,万亚楠. 基于高精地图的超高速公路虚拟轨道系统[J]. 吉林大学学报(工学版), 2023, 53(7): 2016-2028. |
| [9] | 程国柱,盛林,赵浩,冯天军. 基于危险度分析的信号交叉口专用相位设置条件[J]. 吉林大学学报(工学版), 2023, 53(7): 1962-1969. |
| [10] | 刘振亮,赵存宝,吴云鹏,马迷娜,马龙双. 数据驱动的公路桥梁网络全寿命抗震韧性评估[J]. 吉林大学学报(工学版), 2023, 53(6): 1695-1701. |
| [11] | 薛志佳,王召阳,张久鹏,晏长根,许子凯,张英立,黄晓明,马涛. 泥石流作用下道路结构韧性分析及提升[J]. 吉林大学学报(工学版), 2023, 53(6): 1773-1781. |
| [12] | 贾洪飞,徐英俊,杨丽丽,王楠. 商品车多式联运联盟成员选择及利益分配[J]. 吉林大学学报(工学版), 2023, 53(4): 1060-1069. |
| [13] | 孙超,尹浩为,汤文蕴,褚昭明. 交通需求估计下的检测器布局和手机数据扩样推断[J]. 吉林大学学报(工学版), 2023, 53(4): 1070-1077. |
| [14] | 常玉林,徐文倩,孙超,张鹏. 车联网环境下考虑遵从程度的混合流量逐日均衡[J]. 吉林大学学报(工学版), 2023, 53(4): 1085-1093. |
| [15] | 肖雪,李克平,彭博,昌满玮. 基于决策-规划迭代框架的智驾车换道行为建模[J]. 吉林大学学报(工学版), 2023, 53(3): 746-757. |
|
||