吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (4): 1019-1029.doi: 10.13229/j.cnki.jdxbgxb.20210764
• 交通运输工程·土木工程 • 上一篇
基于V2I通信的交叉口车辆碰撞预警方法
赵睿1( ),李云1,胡宏宇2(),高镇海2
),李云1,胡宏宇2(),高镇海2
- 1.吉林大学 汽车工程学院,长春 130022
2.吉林大学 汽车仿真与控制国家重点实验室,长春 130022
Vehicle collision warning method at intersection based on V2I communication
Rui ZHAO1(),Yun LI1,Hong-yu HU2(),Zhen-hai GAO2
- 1.College of Automotive Engineering,Jilin University,Changchun 130022,China
2.State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun 130022,China
摘要:
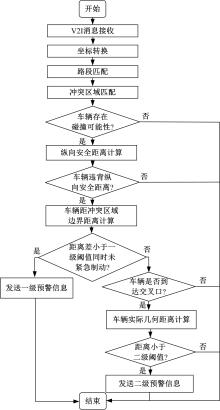
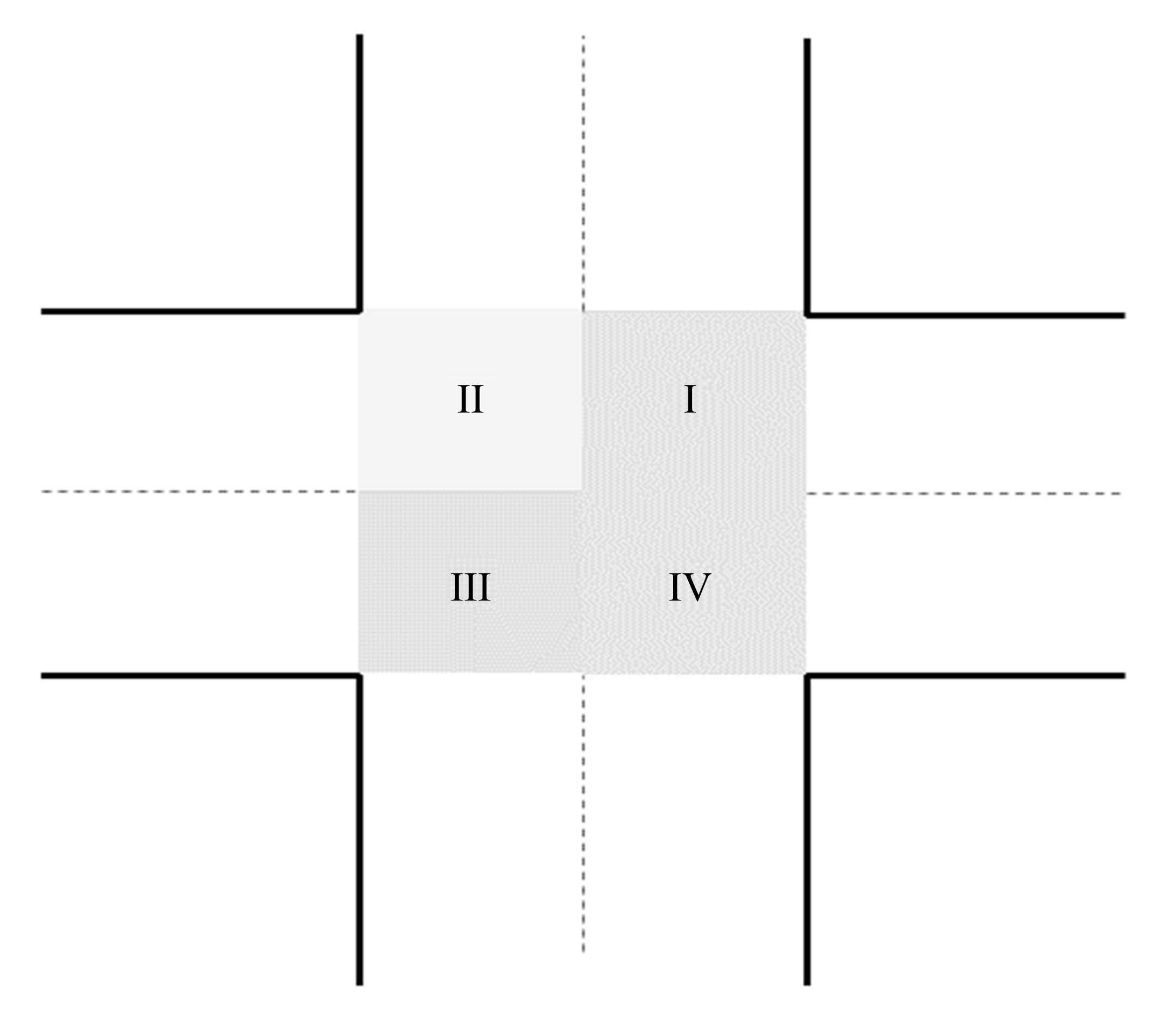
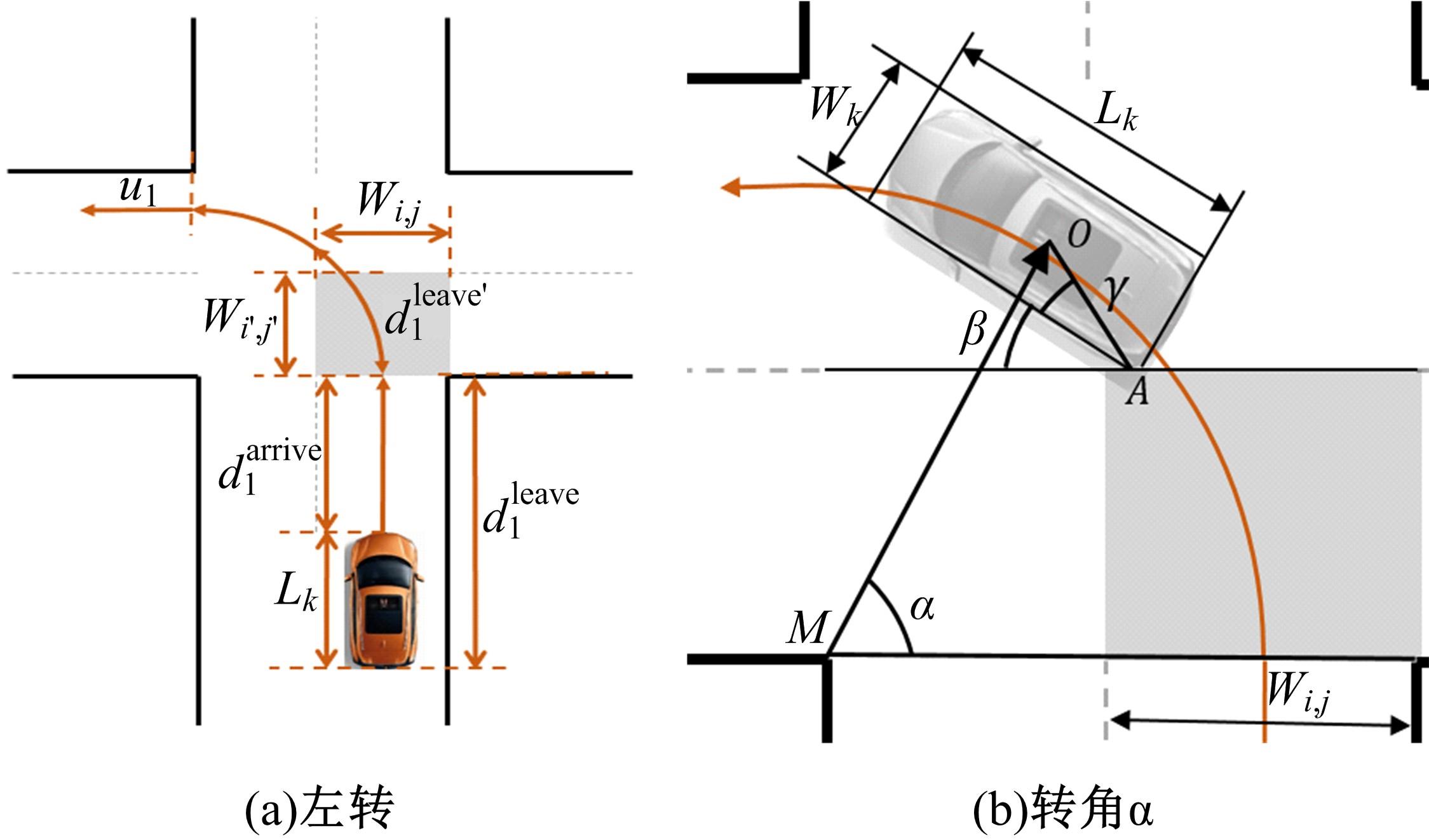
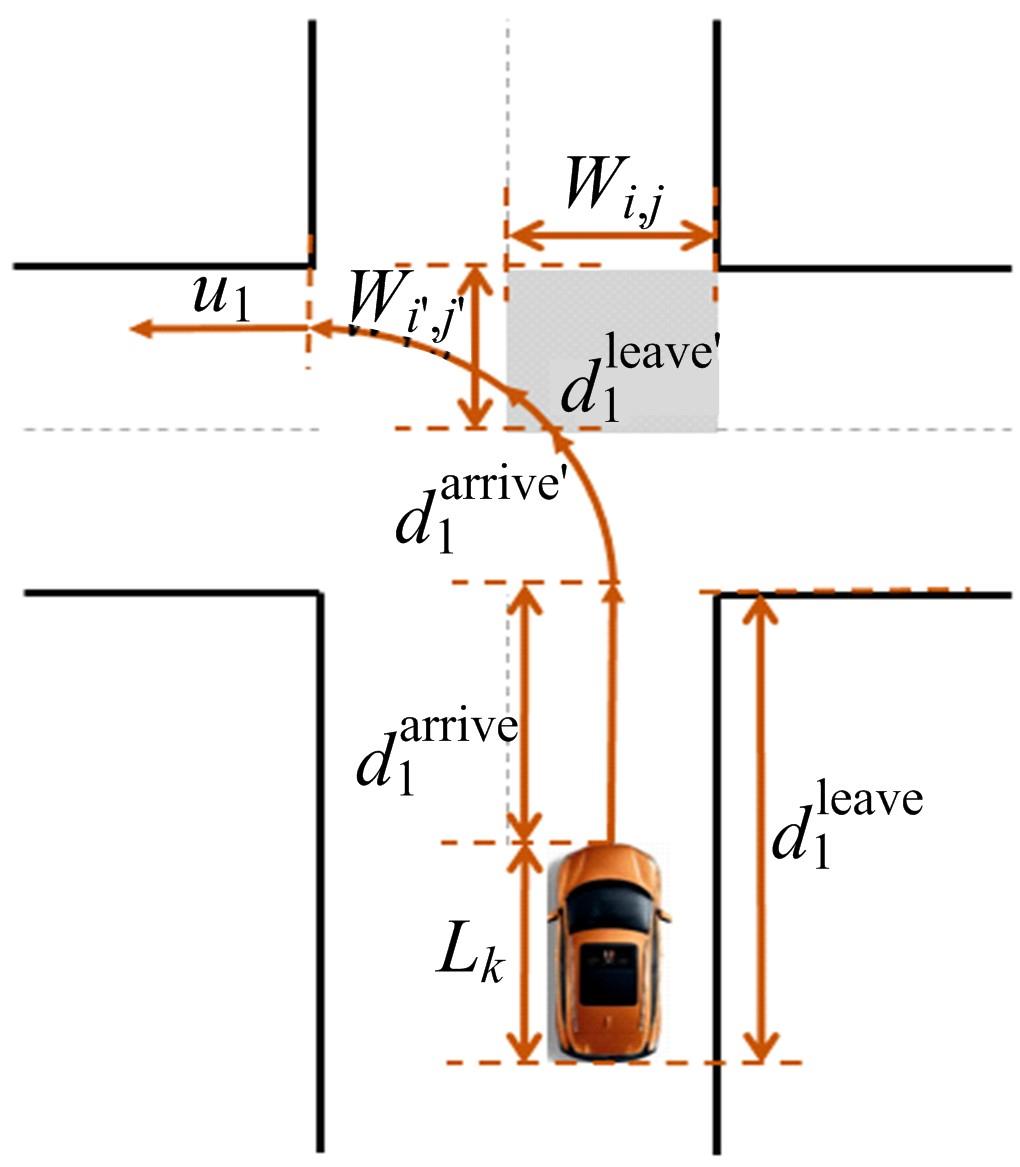
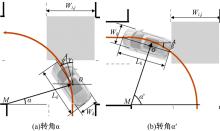
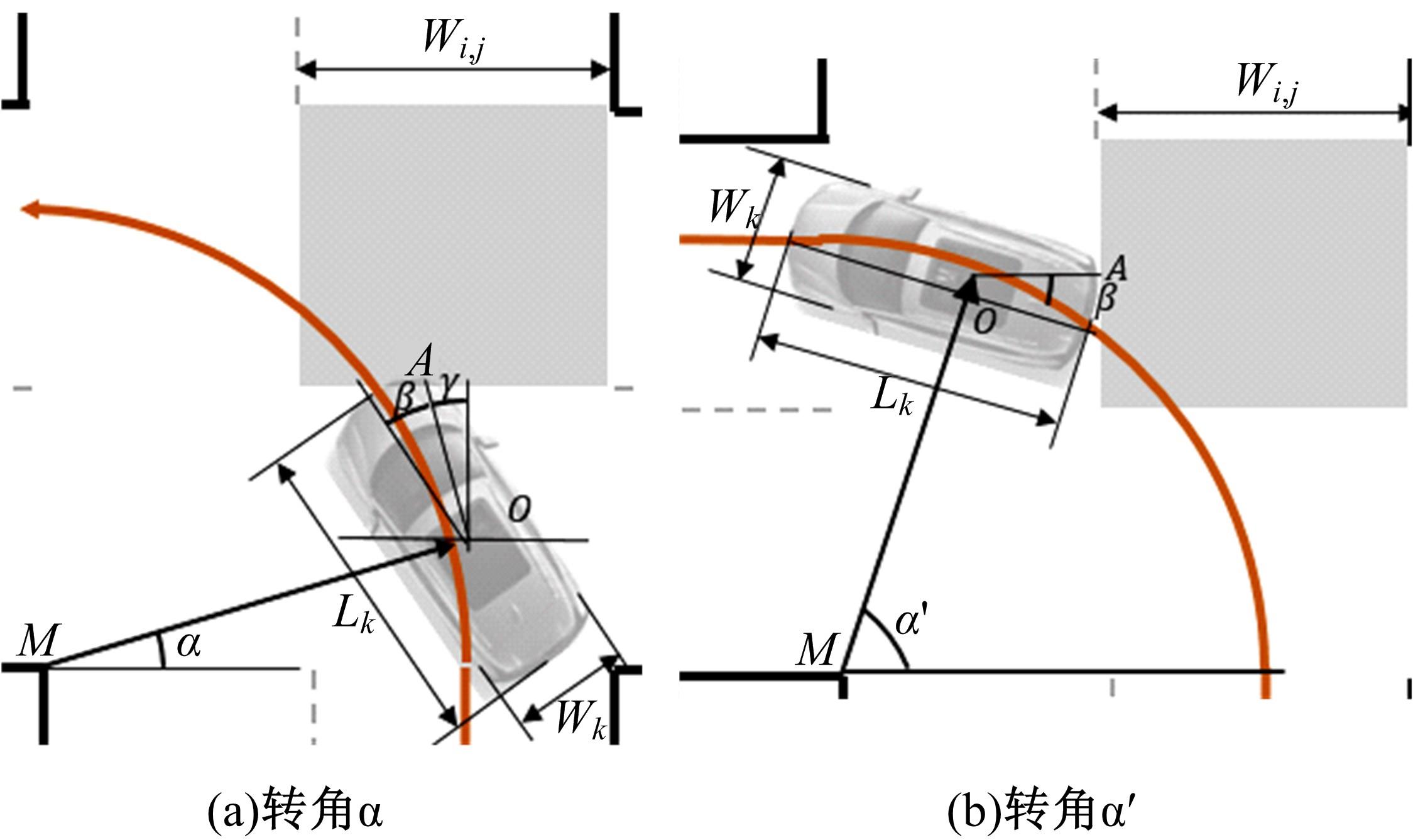
面向交通事故高发比例的无信号交叉口场景,提出了一种基于V2I通信的车辆碰撞预警方法,以保障行车安全。首先,提出路段与冲突区域匹配方法,筛选存在碰撞风险的车辆与冲突区域;在此基础上,提出两级冗余碰撞预警方法,包括用于车辆进入交叉口前的一级动态碰撞距离检测(DDTC)算法以及车辆进入交叉口后的二级圆形区域碰撞检测(CATC)算法。该方法通过网联信息弥补自车感知局限性,通过冲突区域匹配与安全距离过滤提高检测效率,通过动态距离差阈值设置提高检测准确率。基于NHTSA交叉口场景集的测试结果表明,该方法与具代表性的时间差法与距离差法相比,漏报率分别降低了约16%和6%,误报率分别降低了约88%和48%,检测时间均降低了约74%,具备更高的准确性和高效性。
中图分类号:
- U27







| 1 | 中华人民共和国国家统计局. 中华人民共和国2020年国民经济和社会发展统计公报[J]. 中国统计, 2021, 68(3): 8-22. |
| National Bureau of statistics of the People's Republic of China. Statistical bulletin of China on national economic and social development in 2020 [J]. China Statistics Press, 2021, 68(3): 8-22. | |
| 2 | 北京智研科信咨询有限公司. 2020年中国道路交通事故发生数量、死亡人数及财产损失情况分析[DB/OL]. [2021-05-27]. . |
| 3 | Chen L, Englund C. Cooperative intersection management: a survey[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(2): 570-586. |
| 4 | Xu C, Zhao W Z, Wang C Y. An integrated threat assessment algorithm for decision-making of autonomous driving vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(6): 2510-2521. |
| 5 | Kilicarslan M, Zheng J Y. Predict vehicle collision by TTC from motion using a single video camera[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(2): 522-533. |
| 6 | Yang M T, Zheng J Y. On-road collision warning based on multiple FOE segmentation using a dashboard camera[J]. IEEE Transactions on Vehicular Technology, 2015, 64(11): 4974-4984. |
| 7 | Arnold E, Fallah S, Oxtoby D, et al. A survey on 3D object detection methods for autonomous driving applications[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(10): 3782-3795. |
| 8 | Kim Y, Tak S, Kim J, et al. Identifying major accident scenarios in intersection and evaluation of collision warning system[C]∥IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 2017: 1-6. |
| 9 | Jang J A, Choi K, Cho H, et al. A fixed sensor-based intersection collision warning system in vulnerable line-of-sight and/or traffic-violation-prone environment[J]. IEEE transactions on intelligent transportation systems, 2012, 13(4): 1880-1890. |
| 10 | 吴伟, 马万经, 杨晓光. 车路协同环境下基于路径的信号协调优化模型[J]. 吉林大学学报: 工学版, 2014, 44(2): 343-351. |
| Wu Wei, Ma Wan-jing, Yang Xiao-guang. Path based signal coordination optimization model in vehicle road coordination environment[J]. Journal of Jilin University(Engineering and Technology Edition), 2014, 44 (2): 343-351. | |
| 11 | Wymeersch H, Campos G, Falcone P, et al. Challenges for cooperative ITS: Improving road safety through the integration of wireless communications, control, and positioning[C]∥2015 International Conference on Computing, Networking and Communications (ICNC). Garden Grove, CA, USA, 2015: 573⁃578. |
| 12 | Jackeline R-T, Malikopoulos A A. A survey on the coordination of connected and automated vehicles at intersections and merging at highway on-ramps[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(5): 1066⁃1077. |
| 13 | Wu Q, Xiang Q J, Lu C, et al. Traffic safety evaluation of highway intersection with the use of conflict severity concept[C]∥2008 International Conference on Intelligent Computation Technology and Automation (ICICTA). Changsha, China, 2008: 574-578. |
| 14 | Wu Q Q, Zhou S Y, Pan C, et al. Performance analysis of cooperative intersection collision avoidance with C-V2X communications[C]∥IEEE 20th International Conference on Communication Technology (ICCT), Nanning, China, 2020: 757-762. |
| 15 | Kim J H, Kum D S. Threat prediction algorithm based on local path candidates and surrounding vehicle trajectory predictions for automated driving vehicles[C]∥IEEE Intelligent Vehicles Symposium (IV), Seoul, South Korea, 2015: 1220-1225. |
| 16 | 刘玢艳. 基于V2X道路交叉出口车-车避撞预警算法研究[D]. 重庆: 重庆交通大学机电与车辆工程学院, 2018. |
| Liu Fen-yan. Research on vehicle to vehicle collision avoidance early warning algorithm based on V2X Road intersection[D]. Chongqing: School of Mechatronics and Vehicle Engineering,Chongqing Jiaotong University, 2018. | |
| 17 | Miller R, Huang Q F. An adaptive peer-to-peer collision warning system[C]∥IEEE Vehicular Technology Conference, Birmingham, USA, 2002: 317-321. |
| 18 | Tan H S, Huang J H. DGPS-Based vehicle-to-vehicle cooperative collision warning: engineering feasibility viewpoints[J]. IEEE Transactions on Intelligent Transportation Systems, 2006, 7(4): 415-428. |
| 19 | 王勤龙. 基于路侧设备的车辆定位和交叉口防撞预警方法研究[D]. 北京: 北京交通大学,2013. |
| Wang Qin-long. Research on vehicle positioning and intersection collision warning method based on roadside equipment [D]. Beijing: Beijing Jiaotong University, 2013. | |
| 20 | Katriniok A, Rosarius B, Mhnen P. Fully distributed model predictive control of connected automated vehicles in intersections: theory and vehicle experiments[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 23(10): 1-12. |
| 21 | Shai S S, Shaked S, Amnon S. On a formal model of safe and scalable self-driving cars[R/OL]. [2018-10-27]. . |
| 22 | T/CSAE 53-2017:合作式智能运输系统车用通信系统应用层及应用数据交互标准[M].北京:中国汽车工程学会, 2017. |
| 23 | Tiernan T, Toma S, Najm W, et al. Characterization test procedures for intersection collision avoidance systems based on vehicle-to-vehicle communications[M].Washingtong DC: U.S. Department of Transportation, National Highway Traffic Safety Administration, 2015. |
| [1] | 杨红波,史文库,陈志勇,郭年程,赵燕燕. 基于NSGA⁃II的斜齿轮宏观参数多目标优化[J]. 吉林大学学报(工学版), 2023, 53(4): 1007-1018. |
| [2] | 何科,丁海涛,许男,郭孔辉. 基于摄像头和车道线的增强定位系统[J]. 吉林大学学报(工学版), 2023, 53(3): 663-673. |
| [3] | 朱冰,范天昕,赵健,张培兴,孙宇航. 基于危险边界搜索的自动驾驶系统加速测试方法[J]. 吉林大学学报(工学版), 2023, 53(3): 704-712. |
| [4] | 田彦涛,许富强,王凯歌,郝子绪. 考虑周车信息的自车期望轨迹预测[J]. 吉林大学学报(工学版), 2023, 53(3): 674-681. |
| [5] | 高松,王玉琼,王玉海,徐艺,周英超,王鹏伟. 智能汽车纵横向整体反馈线性化控制[J]. 吉林大学学报(工学版), 2023, 53(3): 735-745. |
| [6] | 谢波,高榕,许富强,田彦涛. 低附着路况条件下人车共享转向系统稳定控制[J]. 吉林大学学报(工学版), 2023, 53(3): 713-725. |
| [7] | 何科,丁海涛,赖宣淇,许男,郭孔辉. 基于Transformer的轮式里程计误差预测模型[J]. 吉林大学学报(工学版), 2023, 53(3): 653-662. |
| [8] | 刘嫣然,孟庆瑜,郭洪艳,李嘉霖. 图注意力模式下融合高精地图的周车轨迹预测[J]. 吉林大学学报(工学版), 2023, 53(3): 792-801. |
| [9] | 田彦涛,季言实,唱寰,谢波. 深度强化学习智能驾驶汽车增广决策模型[J]. 吉林大学学报(工学版), 2023, 53(3): 682-692. |
| [10] | 张建,刘金波,高原,刘梦可,高振海,杨彬. 基于多模交互的车载传感器定位算法[J]. 吉林大学学报(工学版), 2023, 53(3): 772-780. |
| [11] | 王登峰,陈宏利,那景新,陈鑫. 单双搭接接头经高温老化后的失效对比[J]. 吉林大学学报(工学版), 2023, 53(2): 346-354. |
| [12] | 张佩,王志伟,杜常清,颜伏伍,卢炽华. 车用质子交换膜燃料电池空气系统过氧比控制方法[J]. 吉林大学学报(工学版), 2022, 52(9): 1996-2003. |
| [13] | 隗海林,王泽钊,张家祯,刘洋. 基于Avl-Cruise的燃料电池汽车传动比及能量管理策略[J]. 吉林大学学报(工学版), 2022, 52(9): 2119-2129. |
| [14] | 刘岩,丁天威,王宇鹏,都京,赵洪辉. 基于自适应控制的燃料电池发动机热管理策略[J]. 吉林大学学报(工学版), 2022, 52(9): 2168-2174. |
| [15] | 李丞,景浩,胡广地,刘晓东,冯彪. 适用于质子交换膜燃料电池系统的高阶滑模观测器[J]. 吉林大学学报(工学版), 2022, 52(9): 2203-2212. |
|
||