吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (3): 772-780.doi: 10.13229/j.cnki.jdxbgxb20221450
• 通信与控制工程 • 上一篇
基于多模交互的车载传感器定位算法
张建1( ),刘金波1,高原1,刘梦可1,高振海2(),杨彬2
),刘金波1,高原1,刘梦可1,高振海2(),杨彬2
- 1.中国第一汽车集团智能网联开发院 智能驾驶开发部,长春 130062
2.吉林大学 汽车仿真与控制国家重点实验室,长春 130022
Localization algorithm of vehicular sensor based on multi⁃mode interaction
Jian ZHANG1(),Jin-bo LIU1,Yuan GAO1,Meng-ke LIU1,Zhen-hai GAO2(),Bin YANG2
- 1.Department of Intelligent Driving,Intelligent Connected Vehicle R&D Institute of China FAW,Changchun 130062,China
2.State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun 130022,China
摘要:
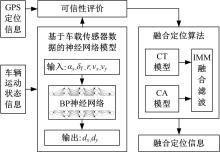
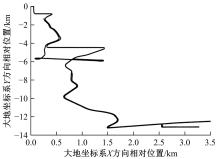
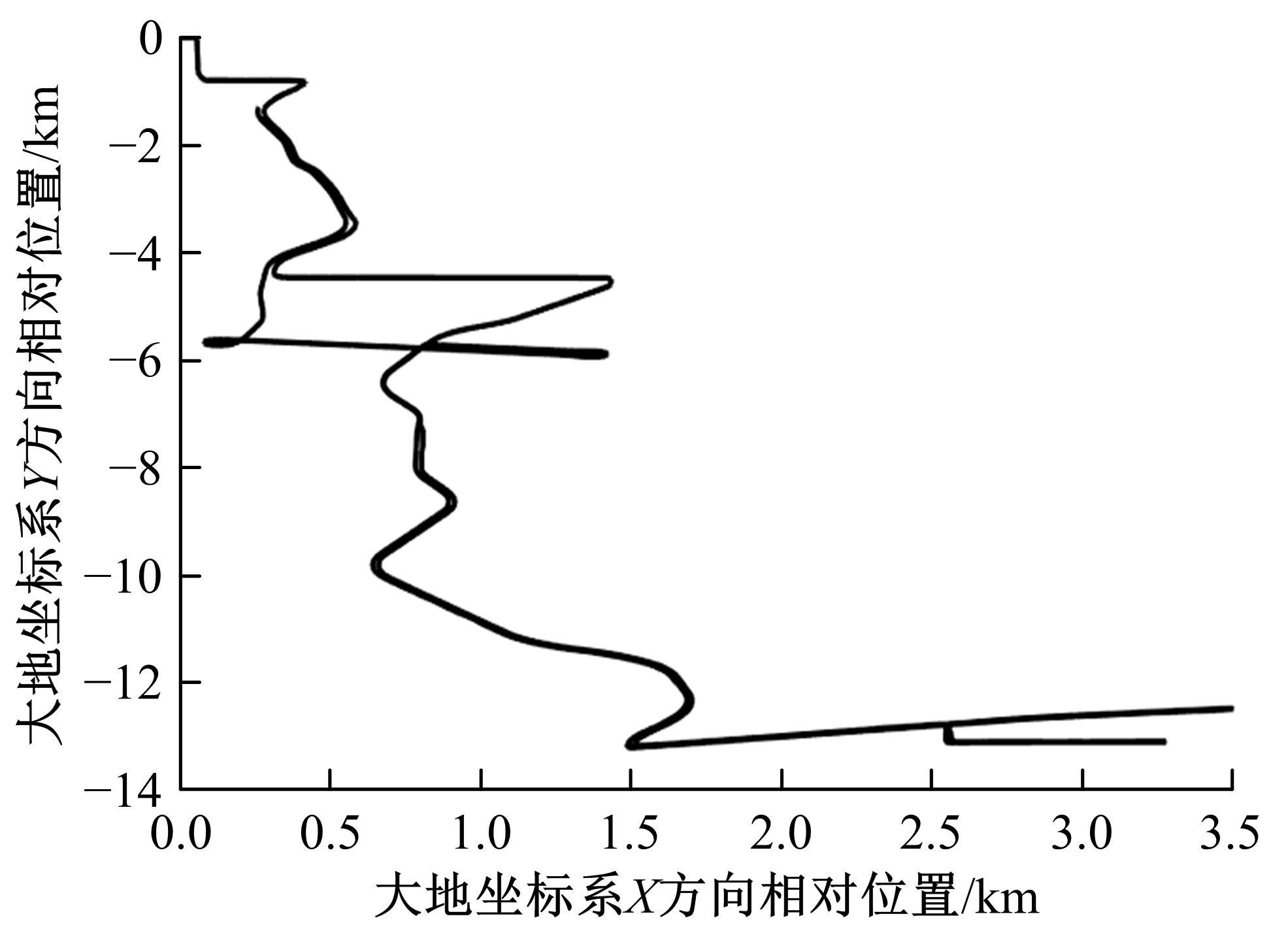
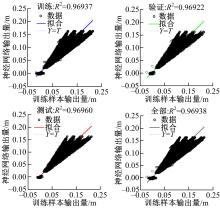
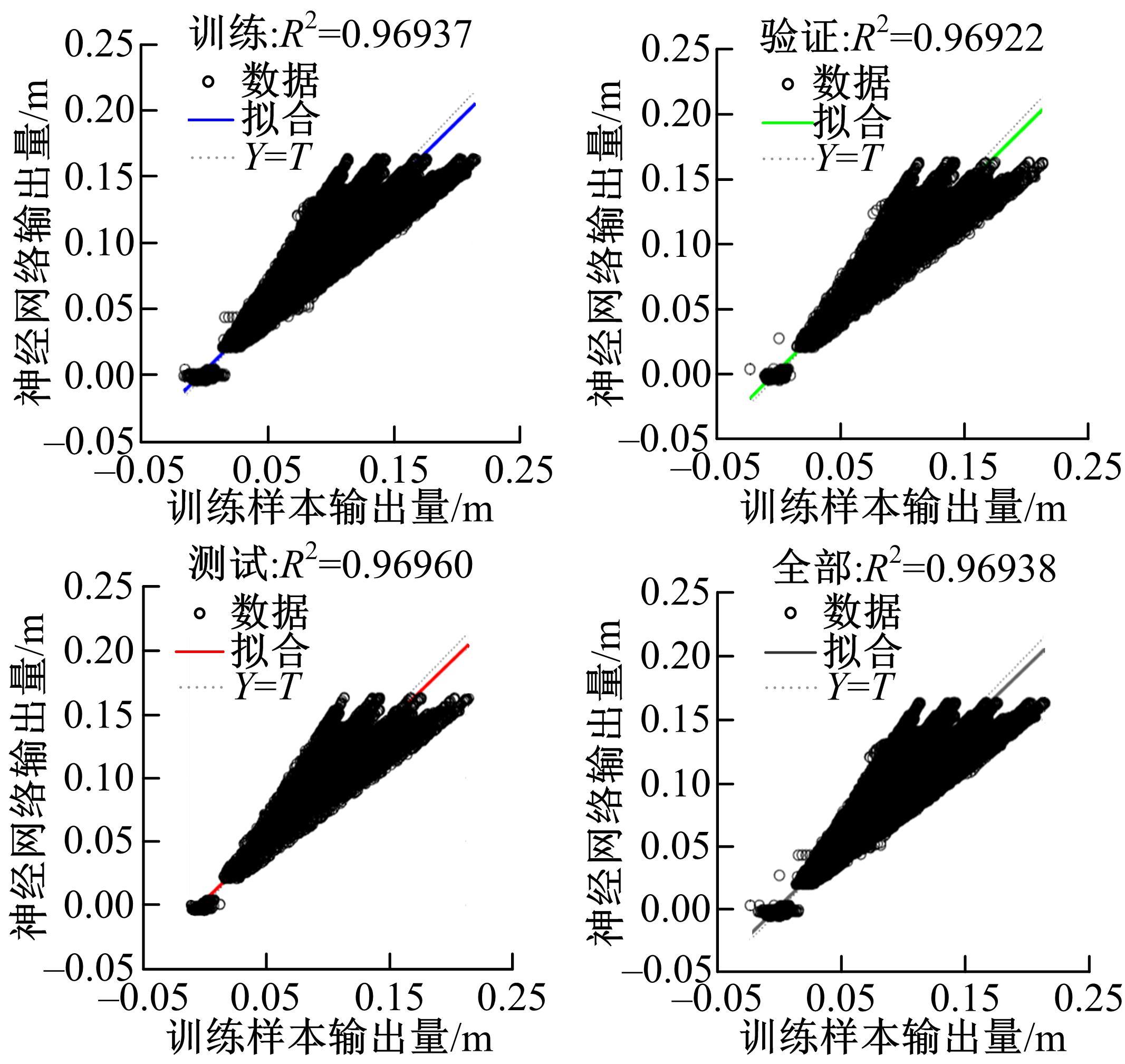
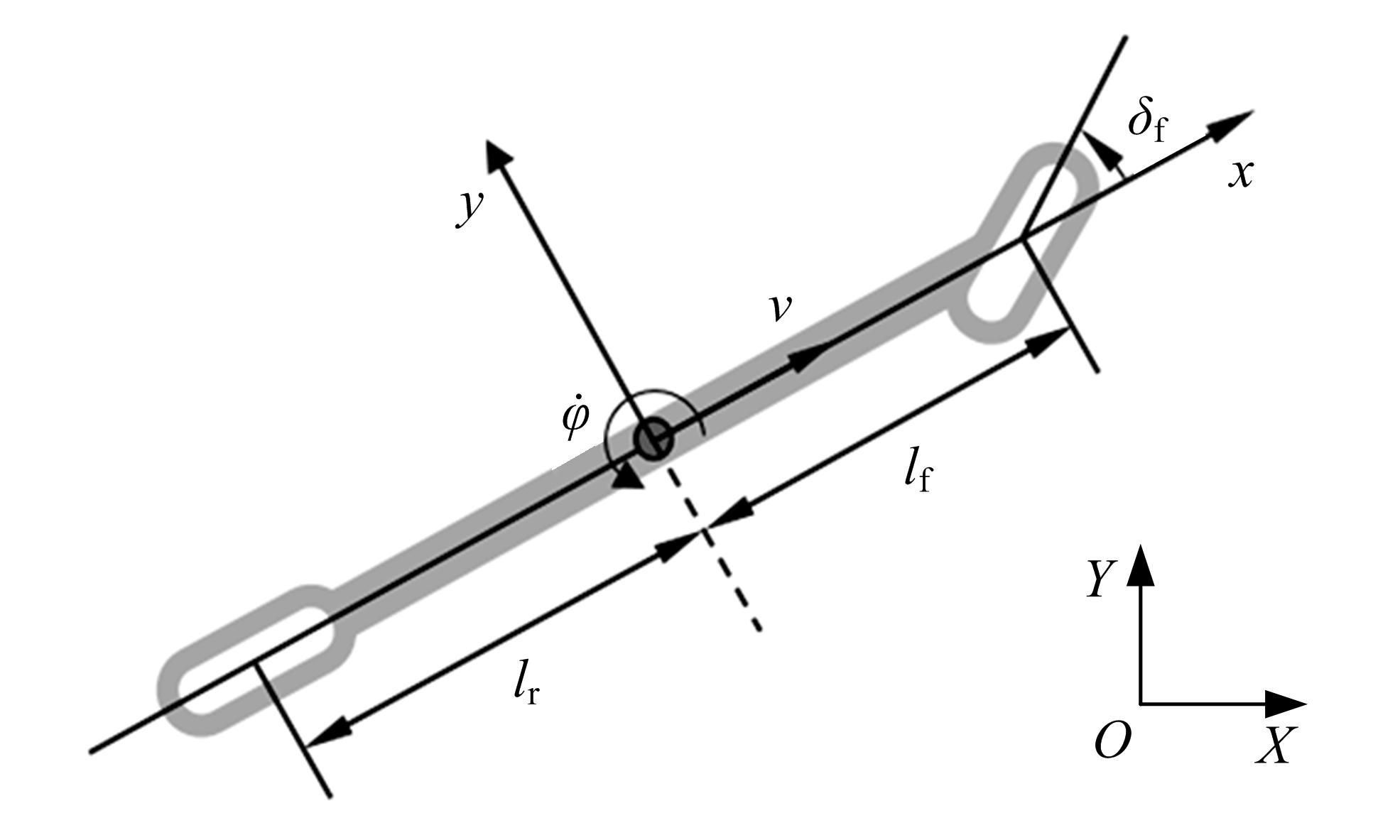
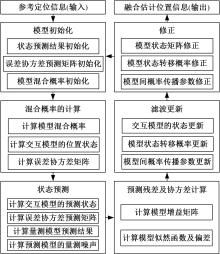
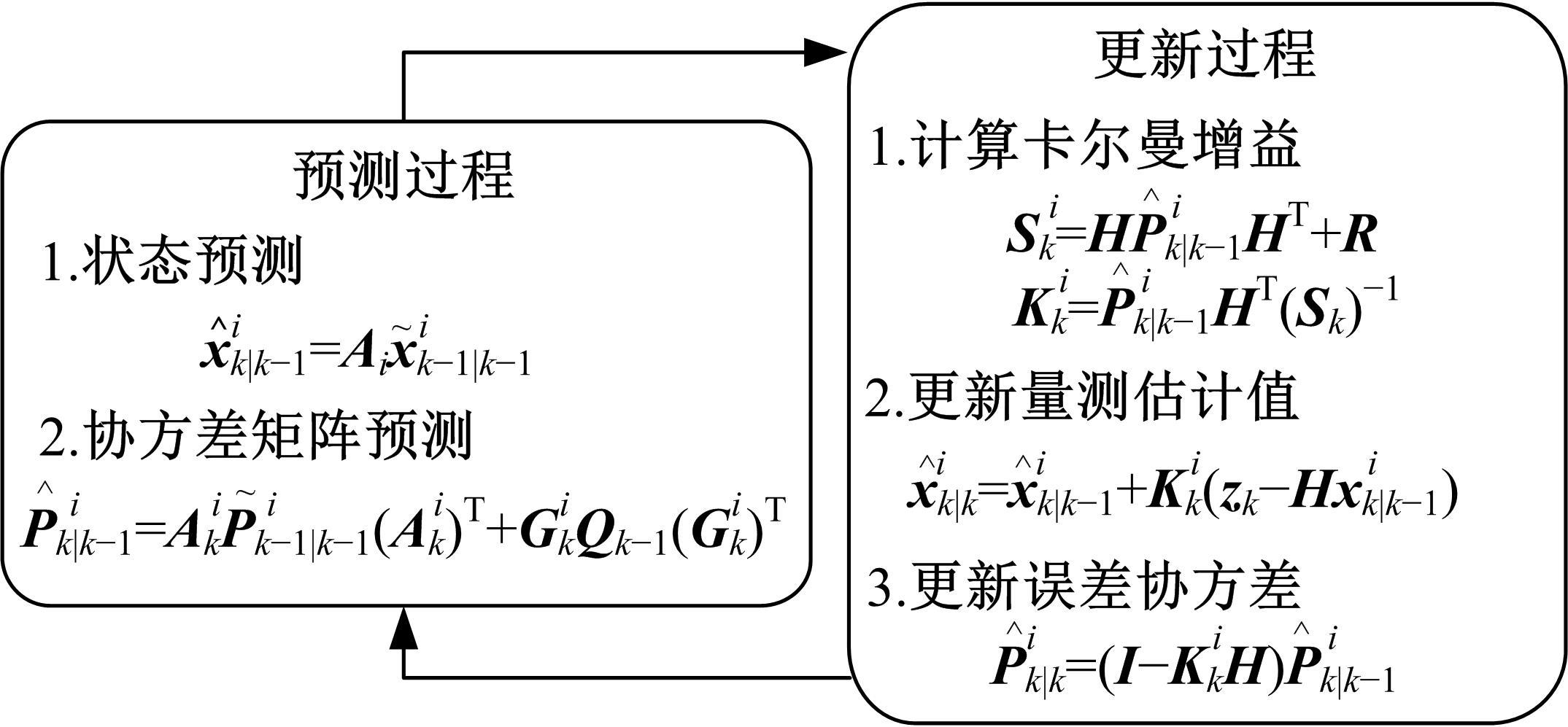
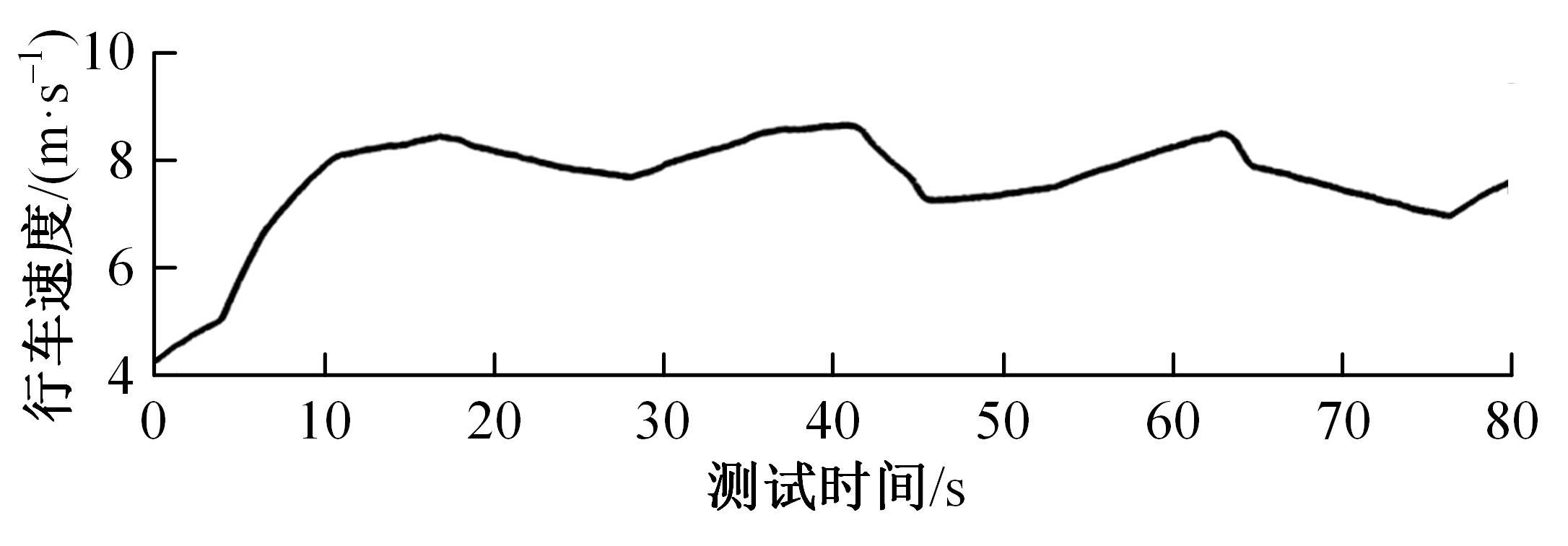
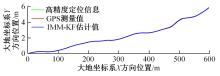
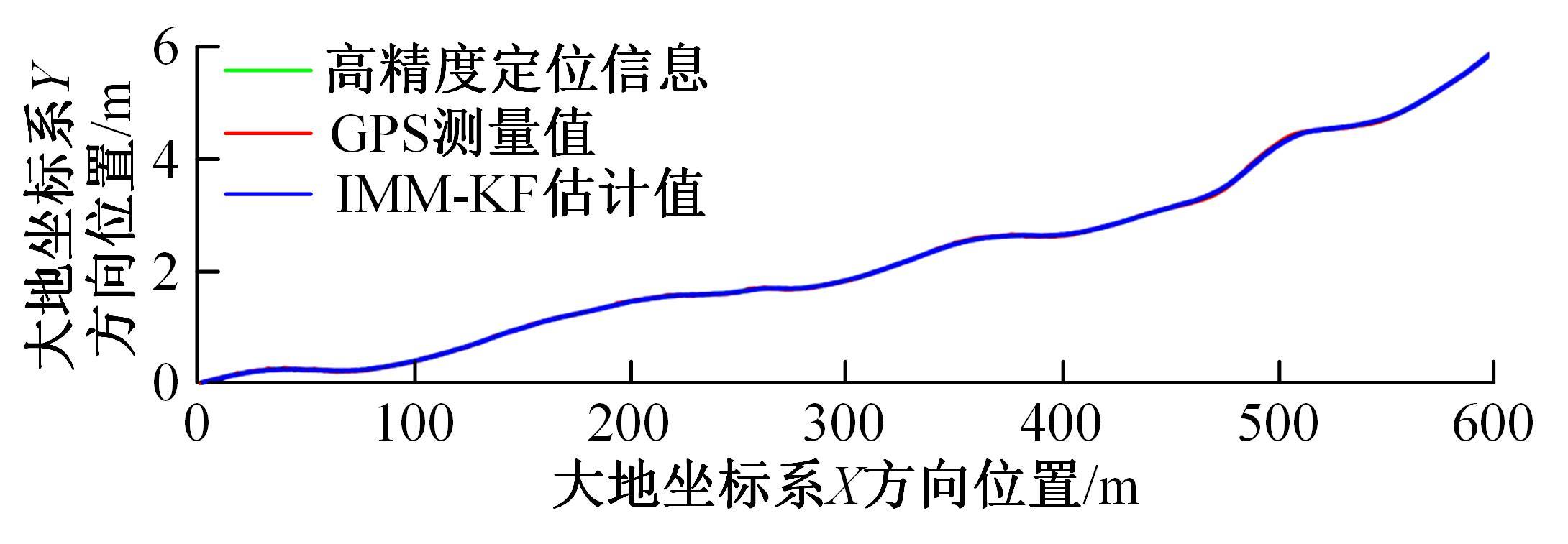
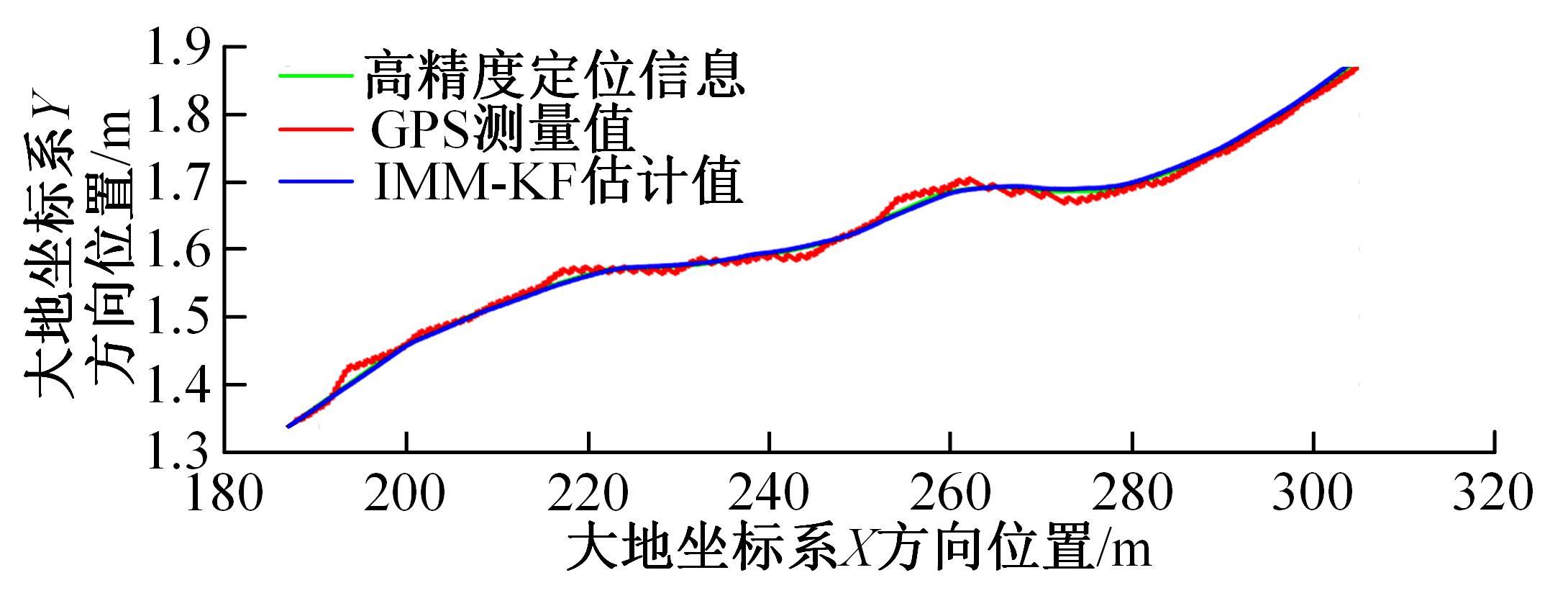
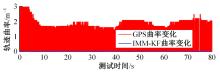
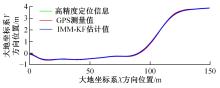
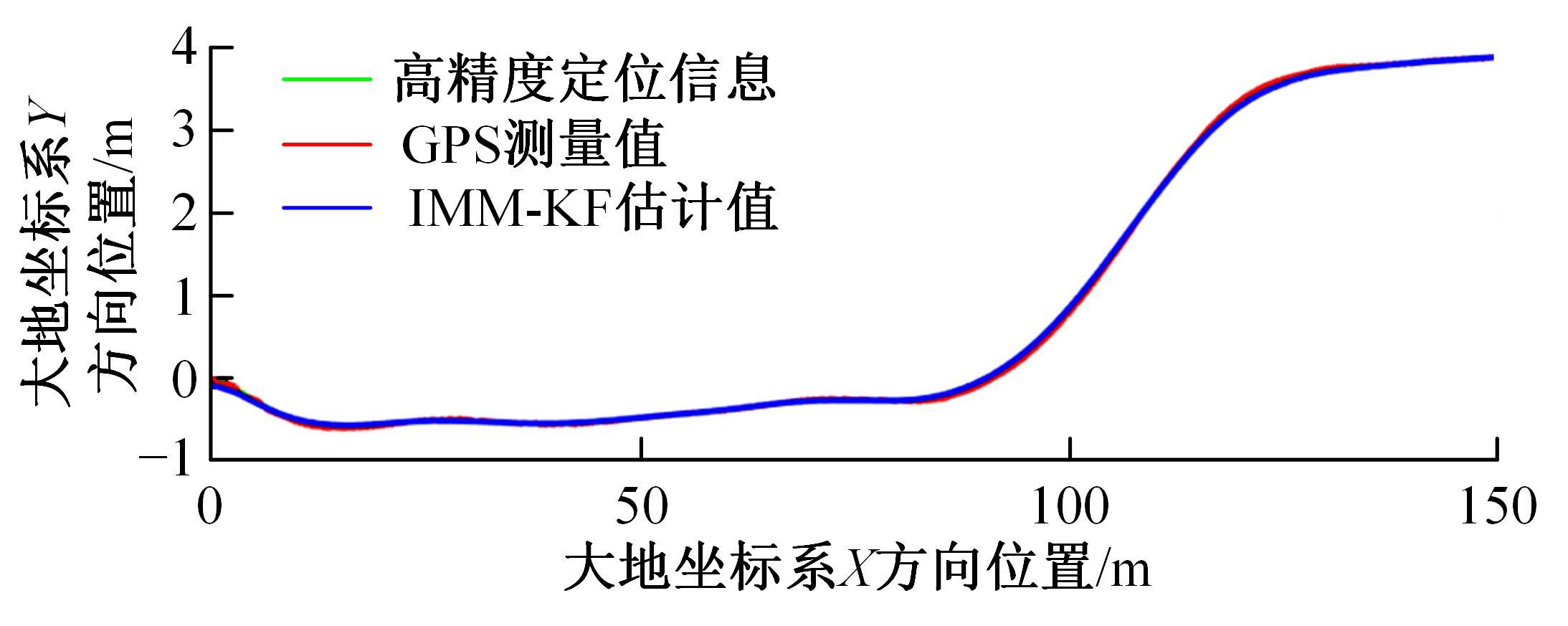
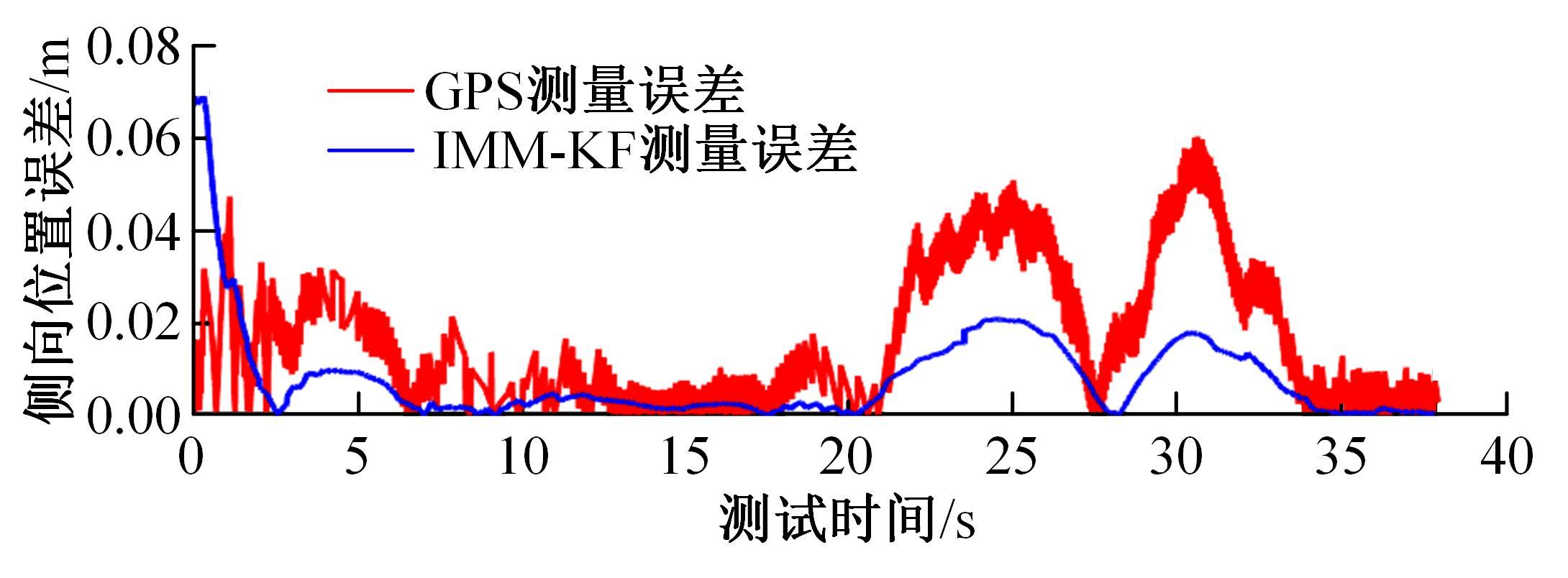
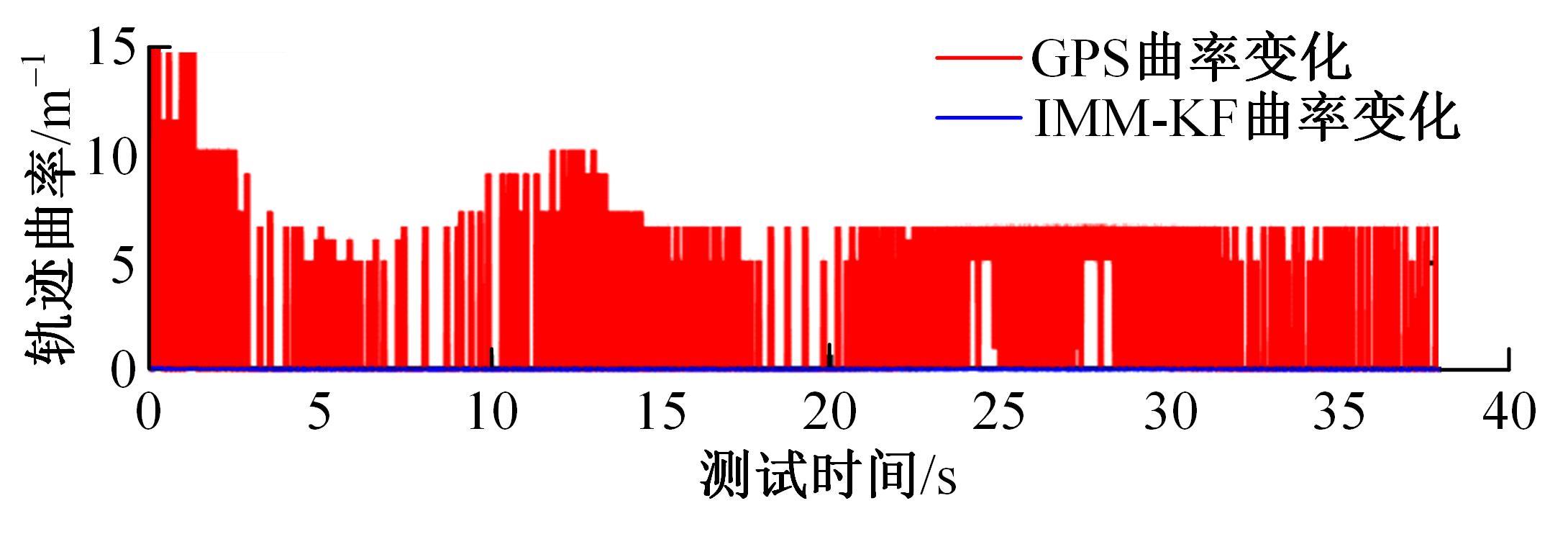
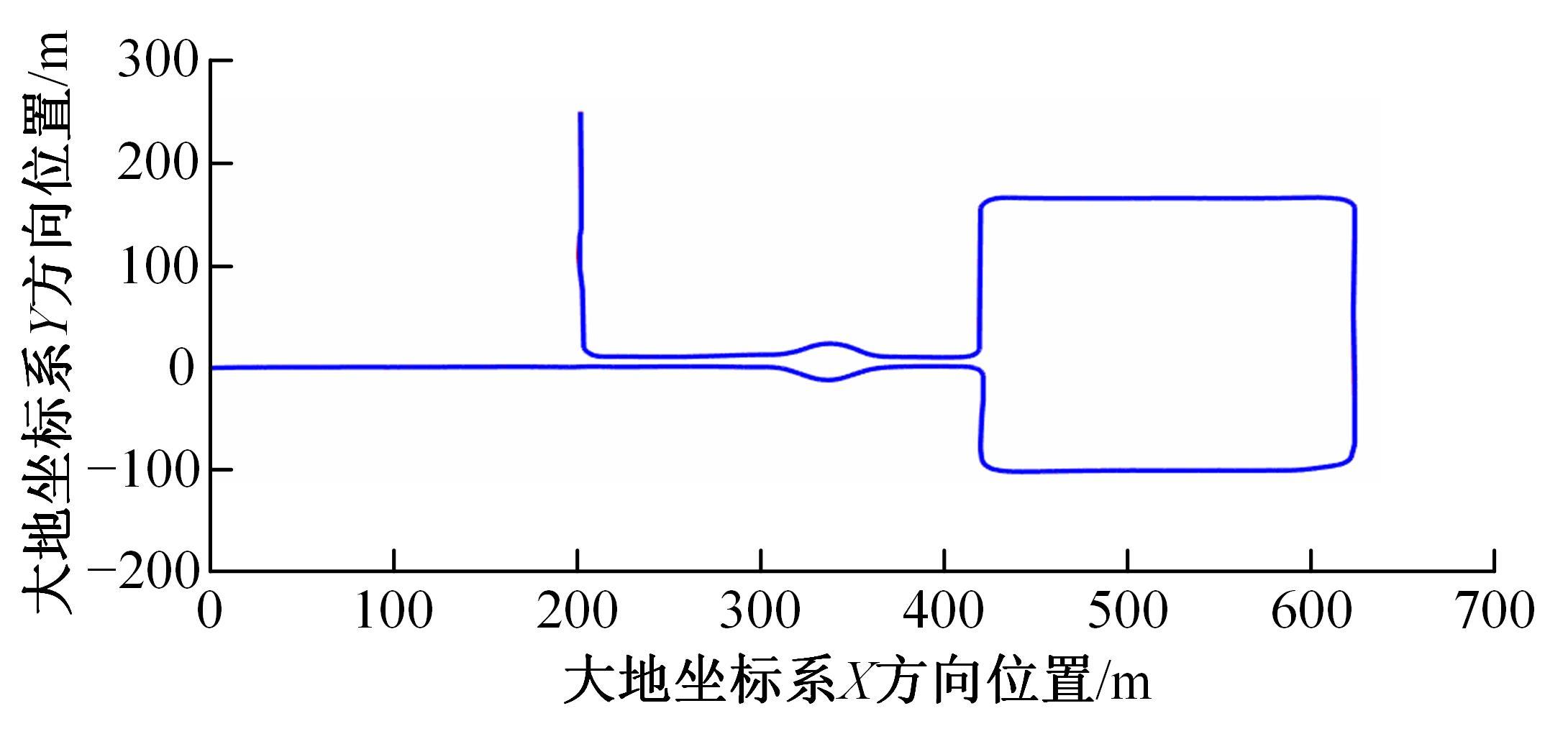
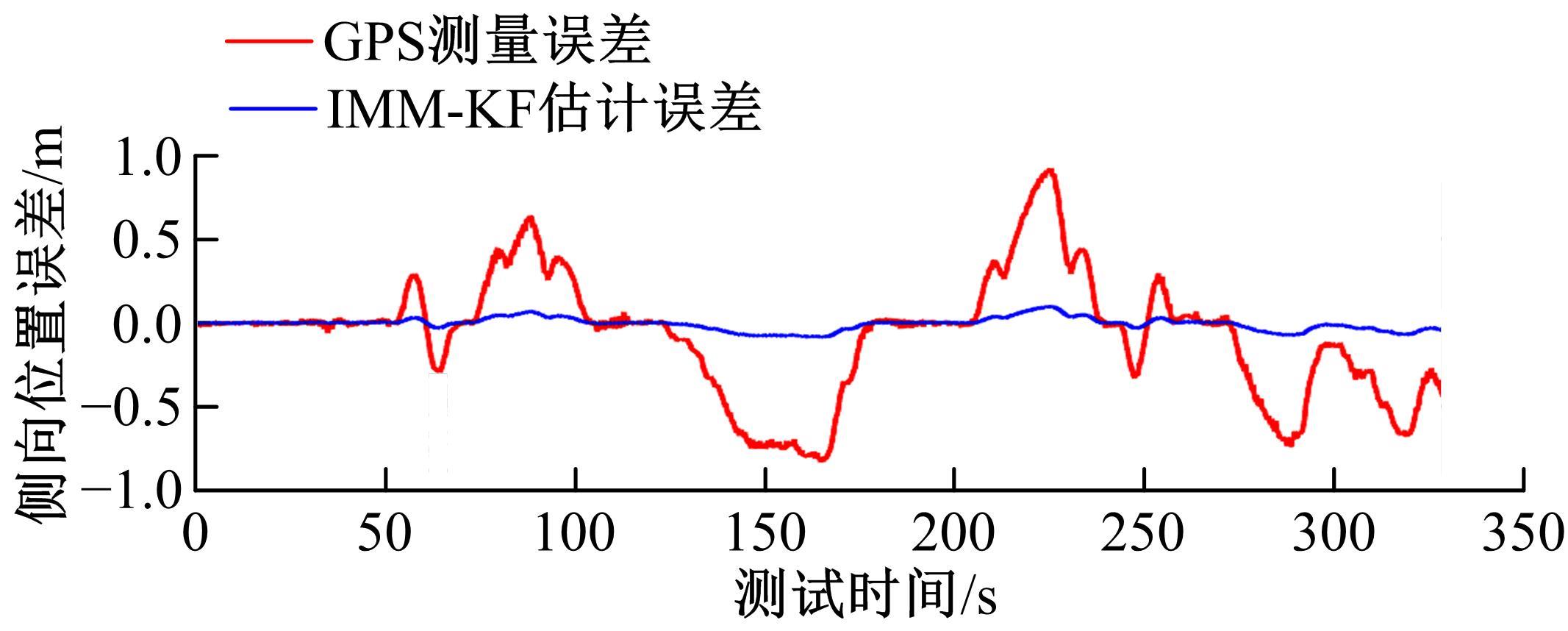
集成全球定位系统(GPS)和车载传感器信息,提出了一种多模交互滤波算法,使车辆可以适应多种驾驶工况。搭建了纵、侧向运动模型对车辆预期行驶位置进行全覆盖预测性描述;通过数据驱动的神经网络和车辆运动模型实现对GPS信号的可信性评价;利用车辆运动模型之间的交互滤波、概率更新等方式实现对过程误差和测量误差的精准估计。最后,在实车测试环境下进行定位融合算法的验证,结果表明,本文算法能够提升多传感器定位系统的定位精度,并在信号不稳定的情况下持续提供较为准确的位置估计结果。
中图分类号:
- U463.67










| 1 | 管欣, 闫冬, 高振海. 基于惯性导航和实时差分全球定位系统的汽车运动状态测试系统[J]. 吉林大学学报: 工学版, 2006, 36(1): 14-19. |
| Guan Xin, Yan Dong, Gao Zhen-hai. Vehicle motion state test system based on inertial navigation and real-time differential global positioning system[J]. Journal of Jilin University (Engineering and Technology Edition), 2006, 36(1): 14-19. | |
| 2 | 肖婷婷. 视觉里程计/IMU辅助GPS融合定位算法研究[D]. 上海: 华东师范大学通信与电子工程学院, 2019. |
| Xiao Ting-ting. Research on visual odometer /IMU assisted GPS fusion positioning algorithm[D]. Shanghai: School of Communication and Electronic Engineering, East China Normal University, 2019. | |
| 3 | 李昂,王伟,吴佳楠. 低成本IMU/GPS组合导航系统设计[J]. 测控技术, 2012, 31(8): 12-15, 18, 19. |
| Li Ang, Wang Wei, Wu Jia-nan. Design in low-cost integrated navigation system[J]. Measurement & Control Technology, 2012, 31(8): 12-15, 18, 19. | |
| 4 | 吕建新, 周翟和, 伏家杰, 等. 自适应联邦卡尔曼滤波在机器人组合导航系统中的应用研究[J]. 测控技术, 2017, 36(6): 15-19. |
| Lv Jian-xin, Zhou Zhai-he, Fu Jia-jie, et al. Application of adaptive federated Kalman filter in robot integrated navigation system[J]. Measurement and Control Technology, 2017, 36(6): 15-19. | |
| 5 | 高振海, 于泳. 提高车载GPS定位精度的IMM-KF算法及建模[C]∥2015中国汽车工程学会年会, 上海, 中国, 2015: 21-23. |
| 6 | 钱华明, 陈亮. 基于当前统计模型的机动目标自适应跟踪算法[J]. 系统工程与电子技术, 2011(11): 2154-2158. |
| Qian Hua-ming, Chen Liang. Adaptive tracking algorithm for maneuvering target based on current statistical model[J]. Systems Engineering and Electronics, 2011(11): 2154-2158. | |
| 7 | Jo K, Chu K, Sunwoo M. Interacting multiple model filter-based sensor fusion of GPS with in-vehicle sensors for real-time vehicle positioning[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(1): 329-343. |
| 8 | Han H, Wang J, Mingyi D U. GPS/BDS/INS tightly coupled integration accuracy improvement using an improved adaptive interacting multiple model with classified measurement update[J]. Chinese Journal of Aeronautics, 2018, 31(3): 142-152. |
| 9 | He Z, Bu X, Yang H, et al. Interacting multiple model cubature Kalman filter for geomagnetic/ infrared projectile attitude measurement[J]. Measurement, 2021, 174(1): No.109077. |
| 10 | Ndjeng A N, Gruyer D, Glaser S, et al. Low cost IMU-odometer-GPS ego localization for unusual maneuvers[J]. Information Fusion, 2011, 12(4): 264-274. |
| 11 | Malleswaran M, Vaidehi V, Irwin S, et al. IMM-UKF-TFS model-based approach for intelligent navigation[J]. Journal of Navigation, 2013, 66(6): 859-877. |
| 12 | Jo K, Chu K, Sunwoo M. Interacting multiple model filter-based sensor fusion of GPS with in-vehicle sensors for real-time vehicle positioning[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(1): 329-343. |
| 13 | Wang Xiang-hua, Yang Xin-yu, Qin Zheng. Hierarchical interacting multiple model algorithm based on improved current model[J]. Journal of Systems Engineering and Electronics, 2010, 21(6): 961-967. |
| 14 | 王忠军. GPS车载导航的交互式多模型算法[J]. 测绘科学技术学报, 2009, 26(3): 170-173. |
| Wang Zhong-jun. Interactive multi-model algorithm for GPS vehicle navigation [J]. Journal of Science and Technology of Surveying and Mapping, 2009, 26(3): 170-173. | |
| 15 | 吉波, 谭震, 樊建文, 等. 基于交互式多模型的飞机编队相对导航算法研究[J]. 航空计算技术, 2014, 44(2): 81-86. |
| Ji Bo, Tan Zhen, Fan Jian-wen, et al. Research on relative navigation algorithm of aircraft formation based on interactive multi-model[J]. Aeronautical Computing Technology, 2014, 44(2): 81-86. |
| [1] | 田彦涛,许富强,王凯歌,郝子绪. 考虑周车信息的自车期望轨迹预测[J]. 吉林大学学报(工学版), 2023, 53(3): 674-681. |
| [2] | 高松,王玉琼,王玉海,徐艺,周英超,王鹏伟. 智能汽车纵横向整体反馈线性化控制[J]. 吉林大学学报(工学版), 2023, 53(3): 735-745. |
| [3] | 谢波,高榕,许富强,田彦涛. 低附着路况条件下人车共享转向系统稳定控制[J]. 吉林大学学报(工学版), 2023, 53(3): 713-725. |
| [4] | 何科,丁海涛,赖宣淇,许男,郭孔辉. 基于Transformer的轮式里程计误差预测模型[J]. 吉林大学学报(工学版), 2023, 53(3): 653-662. |
| [5] | 田彦涛,季言实,唱寰,谢波. 深度强化学习智能驾驶汽车增广决策模型[J]. 吉林大学学报(工学版), 2023, 53(3): 682-692. |
| [6] | 何科,丁海涛,许男,郭孔辉. 基于摄像头和车道线的增强定位系统[J]. 吉林大学学报(工学版), 2023, 53(3): 663-673. |
| [7] | 朱冰,范天昕,赵健,张培兴,孙宇航. 基于危险边界搜索的自动驾驶系统加速测试方法[J]. 吉林大学学报(工学版), 2023, 53(3): 704-712. |
| [8] | 王登峰,陈宏利,那景新,陈鑫. 单双搭接接头经高温老化后的失效对比[J]. 吉林大学学报(工学版), 2023, 53(2): 346-354. |
| [9] | 张佩,王志伟,杜常清,颜伏伍,卢炽华. 车用质子交换膜燃料电池空气系统过氧比控制方法[J]. 吉林大学学报(工学版), 2022, 52(9): 1996-2003. |
| [10] | 隗海林,王泽钊,张家祯,刘洋. 基于Avl-Cruise的燃料电池汽车传动比及能量管理策略[J]. 吉林大学学报(工学版), 2022, 52(9): 2119-2129. |
| [11] | 刘岩,丁天威,王宇鹏,都京,赵洪辉. 基于自适应控制的燃料电池发动机热管理策略[J]. 吉林大学学报(工学版), 2022, 52(9): 2168-2174. |
| [12] | 李丞,景浩,胡广地,刘晓东,冯彪. 适用于质子交换膜燃料电池系统的高阶滑模观测器[J]. 吉林大学学报(工学版), 2022, 52(9): 2203-2212. |
| [13] | 王克勇,鲍大同,周苏. 基于数据驱动的车用燃料电池故障在线自适应诊断算法[J]. 吉林大学学报(工学版), 2022, 52(9): 2107-2118. |
| [14] | 曹起铭,闵海涛,孙维毅,于远彬,蒋俊宇. 质子交换膜燃料电池低温启动水热平衡特性[J]. 吉林大学学报(工学版), 2022, 52(9): 2139-2146. |
| [15] | 陈凤祥,伍琪,李元松,莫天德,李煜,黄李平,苏建红,张卫东. 2.5吨燃料电池混合动力叉车匹配、仿真及优化[J]. 吉林大学学报(工学版), 2022, 52(9): 2044-2054. |
|
||