吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (11): 3220-3230.doi: 10.13229/j.cnki.jdxbgxb.20221645
考虑多车响应的网联混行车流跟驰模型及稳态分析
宋慧1( ),曲大义1(),王少杰1,王韬1,2,杨子奕1
),曲大义1(),王少杰1,王韬1,2,杨子奕1
- 1.青岛理工大学 机械与汽车工程学院,山东 青岛 266520
2.淄博职业学院 人工智能与大数据学院,山东 淄博 255300
Connected mixed traffic flow car-following model and stability analysis considering multiple vehicles response
Hui SONG1(),Da-yi QU1(),Shao-jie WANG1,Tao WANG1,2,Zi-yi YANG1
- 1.School of Mechanical and Automotive Engineering,Qingdao University of Technology,Qingdao 266520,China
2.School of Artificial Intelligence and Big Data,Zibo Vocational Institute,Zibo 255300,China
摘要:
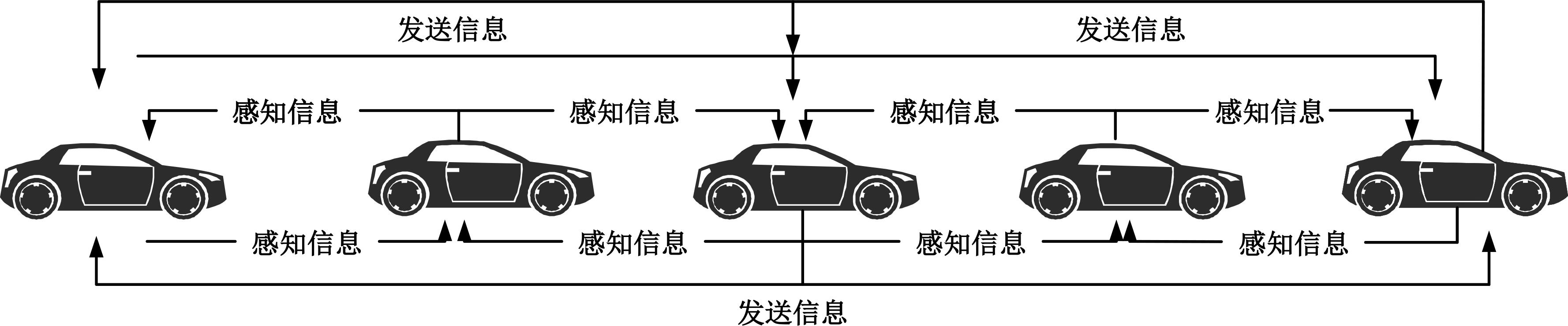
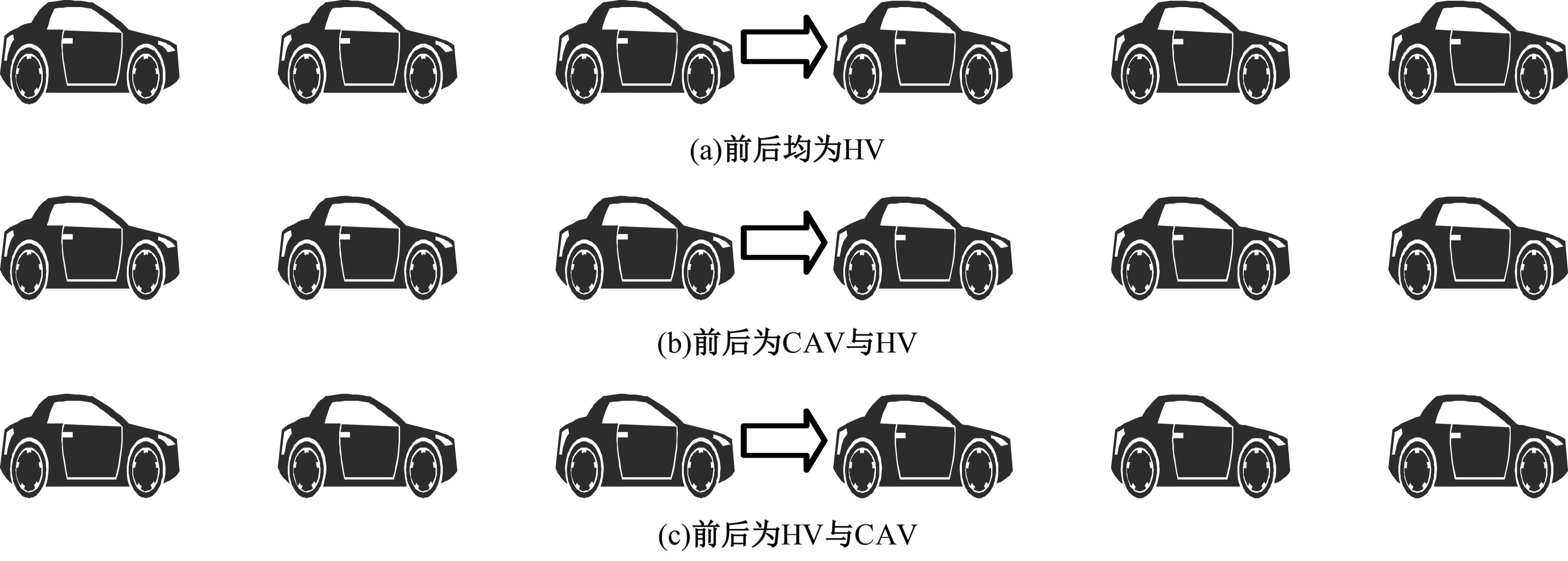
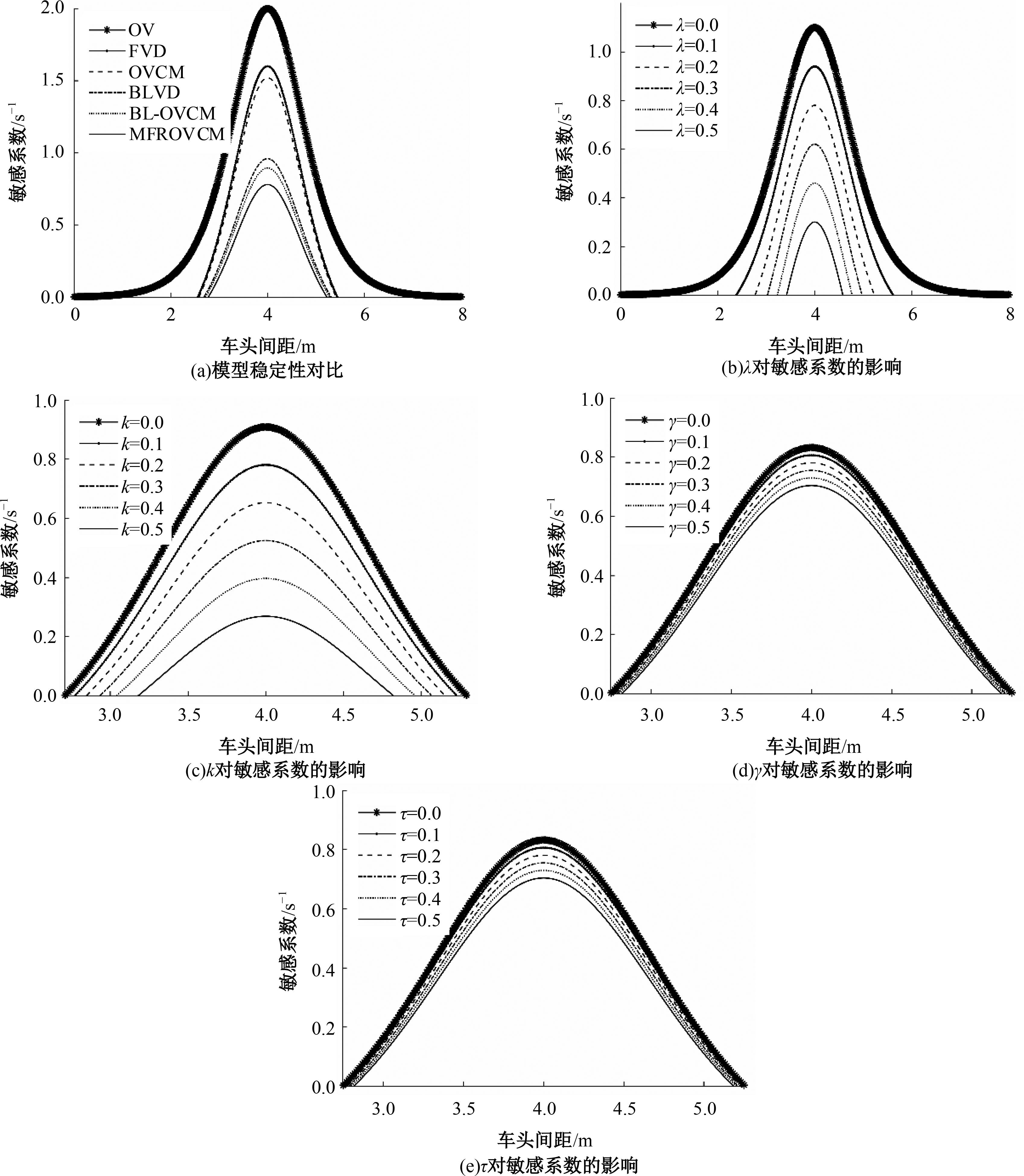
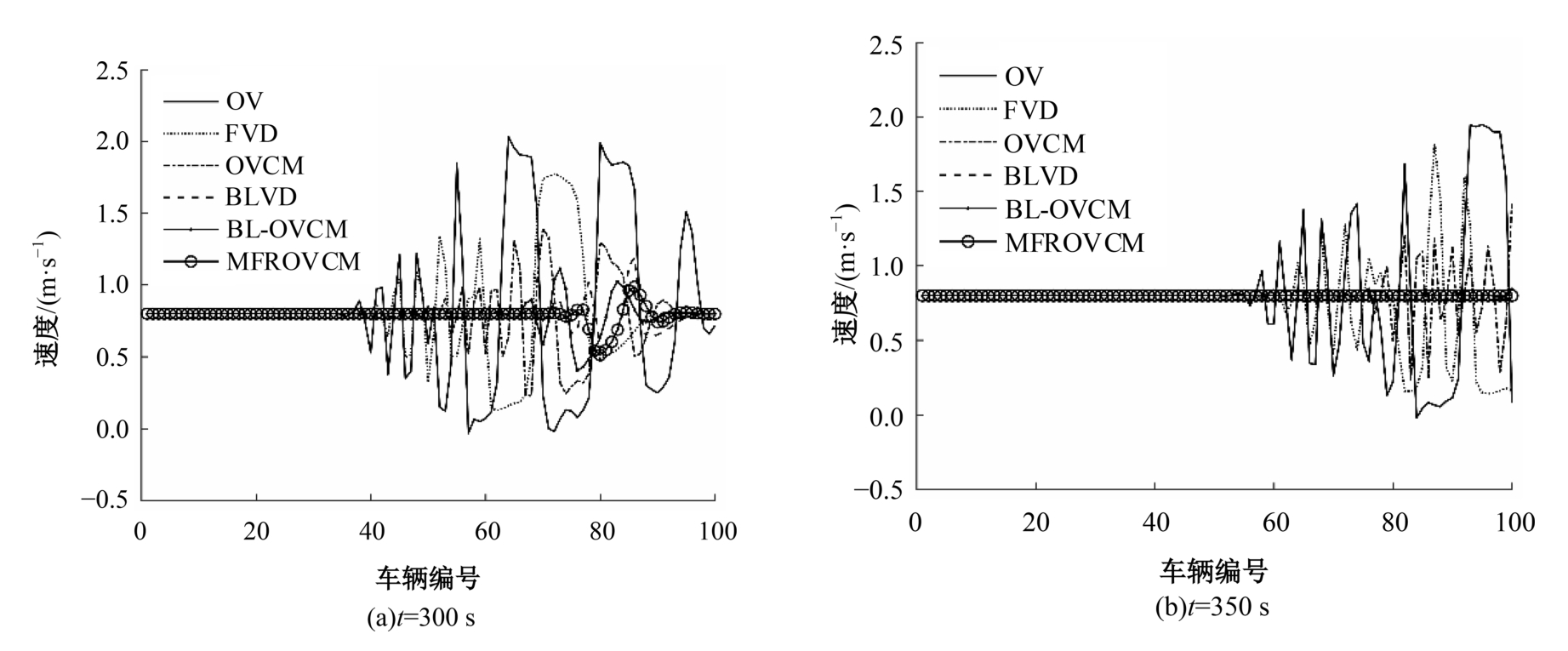
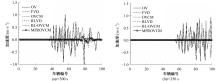
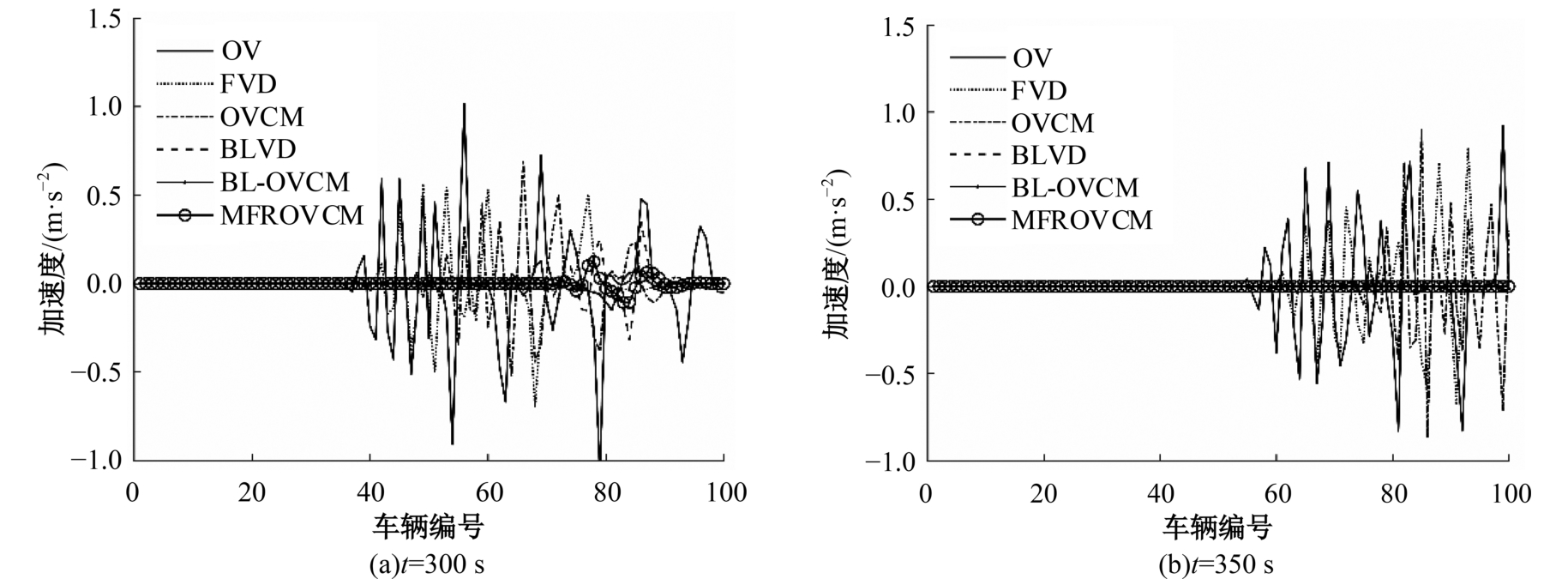
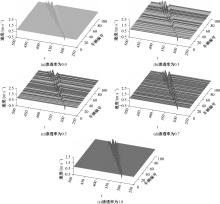
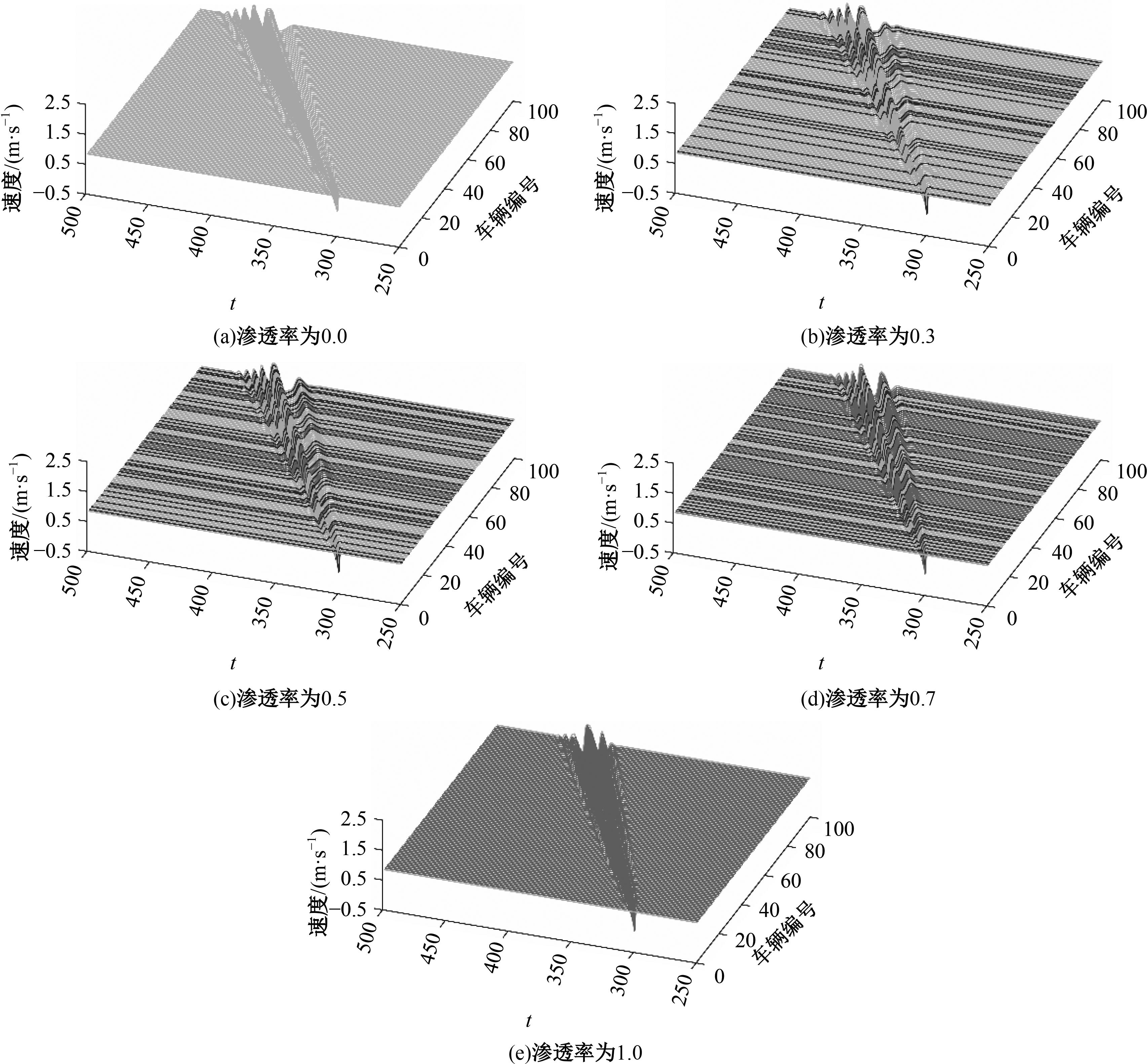
为研究网联混行车流跟驰特性,本文建立网联混行车流跟驰模型帮助理解其跟驰特性,从而提高混行车流稳定性。考虑前后车头间距最优速度与最优速度记忆项,多前车速度差与加速度差,构建适用于智能网联汽车(CAV)与人工驾驶车辆(HV)交互渗透的混行车流跟驰模型(MFROVCM)。对模型进行稳定性分析,结果显示,MFROVCM模型与OVCM模型相比,不稳定区域减少53.17%;与BL-OVCM模型相比,不稳定区域减少15.44%,模型稳定性优于其他对比模型。数值仿真结果显示:相同扰动条件下,MFROVCM模型具有更好的交通流致稳性能,随着CAV渗透率的增大,整体交通流速度波动幅度减小,且恢复稳定的时间逐渐减小。该模型可应用于CAV与HV混行的车流跟驰仿真,为网联混合车流的交通控制策略提供理论依据与模型基础。
中图分类号:
- U491




| 1 | Zhang X, Jarrett D F. Stability analysis of the classical car-following model[J]. Transportation Research B, 1997, 31: 441-462. |
| 2 | 纪艺, 史昕, 赵祥模. 基于多前车信息融合的智能网联车辆跟驰模型[J]. 计算机应用, 2019, 39(12): 3685-3690. |
| Ji Yi, Shi Xin, Zhao Xiang-mo. Car-following model for intelligent connected vehicles based on multiple headway information fusion[J]. Journal of Computer Applications, 2019, 39(12): 3685-3690. | |
| 3 | Milanes V, Shladover S E, Spring J, et al. Cooperative adaptive cruise control in real traffic situations[J]. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(1): 296-305. |
| 4 | 宗芳, 王猛, 贺正冰. 考虑多车影响的分子动力学智能网联跟驰模型[J]. 交通运输系统工程与信息, 2022, 22(1): 37-48. |
| Zong Fang, Wang Meng, He Zheng-bing. A molecular dynamics-based car-following model for connected and automated vehicles considering impact of multiple vehicles[J]. Journal of Transportation Systems Engineering and Information Technology, 2022, 22(1): 37-48. | |
| 5 | 曲大义, 杨建, 陈秀锋, 等. 车辆跟驰的分子动力学特性及其模型[J]. 吉林大学学报: 工学版, 2012, 42(5): 1198-1202. |
| Qu Da-yi, Yang Jian, Chen Xiu-feng, et al. Molecualar kinetics behavior of car-following and its model[J]. Journal of Jilin University (Engineering and Technology Edition), 2012, 42(5): 1198-1202. | |
| 6 | 李娟, 曲大义, 刘聪, 等. 基于分子动力学的跟驰特性及其模型[J]. 公路交通科技, 2018, 35(3): 130-135. |
| Li Juan, Qu Da-yi, Liu Cong, et al. Car-following characteristics and its models based on molecular dynamics[J]. Journal of Highway and Transportation Research and Development, 2018, 35(3): 130-135. | |
| 7 | 秦严严, 王昊, 王炜, 等. 混有CACC车辆和ACC车辆的异质交通流基本图模型[J]. 中国公路学报, 2017, 30(10): 127-136. |
| Qin Yan-yan, Wang Hao, Wang Wei, et al. Fundamental diagram model of heterogeneous traffic flow mixed with cooperative adaptive cruise control vehicles and adaptive cruise control vehicles[J]. China Journal of Highway and Transport, 2017, 30(10): 127-136. | |
| 8 | Xie D F, Zhao X M, He Z B. Heterogeneous traffic mixing regular and connected vehicles: modeling and stabilization[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(6): 2060-2071. |
| 9 | 吴兵, 王文璇, 李林波, 等. 多前车影响的智能网联车辆纵向控制模型[J]. 交通运输工程学报, 2020, 20(2): 184-194. |
| Wu Bing, Wang Wen-xuan, Li Lin-bo, et al. Longitudinal control model for connected autonomous vehicles influenced by multiple preceding vehicles[J]. Journal of Traffic and Transportation Engineering, 2020, 20(2): 184-194. | |
| 10 | 宗芳, 石佩鑫, 王猛, 等. 考虑前后多车的网联自动驾驶车辆混流跟驰模型[J]. 中国公路学报, 2021, 34(7): 105-117. |
| Zong Fang, Shi Pei-xin, Wang Meng, et al. Connected and automated vehicle mixed-traffic car-following model considering states of multiple front and rear vehicles[J]. China Journal of Highway and Transport, 2021, 34(7): 105-117. | |
| 11 | 宗芳, 王猛, 曾梦, 等. 考虑多前车作用势的混行交通流车辆跟驰模型[J]. 交通运输工程学报, 2022, 22(1): 250-262. |
| Zong Fang, Wang Meng, Zeng Meng, et al. Vehicle following modeling mixed traffic flow considering interaction potential of multiple front vehicles[J]. Journal of Traffic and Transportation Engineering, 2022, 22(1): 250-262. | |
| 12 | Peng G, Lu W, He H, et al. Nonlinear analysis of a new car-following model accounting for the optimal velocity changes with memory[J]. Communications in Nonlinear Science & Numerical Simulation, 2016, 40: 197-205. |
| 13 | 李腾龙, 惠飞. 考虑后视和最优速度记忆的跟驰模型及仿真[J]. 计算机工程与应用, 2017, 53(12): 249-254. |
| Li Teng-long, Hui Fei. Numerical simulation of car-following model considering optimal velocity changes with memory and backward looking effect[J]. Computer Engineering and Applications, 2017, 53(12): 249-254. | |
| 14 | Nakayama A, Sugiyama Y, Hasebe K. Effect of looking at the car that follows in an optimal velocity model of traffic flow[J]. Physical Review E Statistical Nonlinear & Soft Matter Physics, 2002, 65(1): 016112. |
| 15 | 高青海. 智能网联车辆跟驰模型及交通流特性研究[J]. 公路, 2021, 66(10): 229-235. |
| Gao Qing-hai. Research on car-following model and traffic flow characteristics of intelligent and connected vehicle[J]. Highway, 2021, 66(10): 229-235. | |
| 16 | 孙棣华, 张建厂, 赵敏, 等. 考虑后视效应和速度差信息的跟驰模型[J]. 四川大学学报: 自然科学版, 2012, 49(1): 115-120. |
| Sun Di-hua, Zhang Jian-chang, Zhao Min, et al. Effect of backward looking and velocity difference in an extended car following model[J]. Journal of Sichuan University (Natural Science Edition), 2012, 49(1): 115-120. | |
| 17 | Lerner N D, Huey R W, Mcgee H W, et al. Older driver perception-reaction time for intersection sight distance and object detection. volume i: final report[J]. Gap Acceptance, 1995, 1: 33-40. |
| 18 | 蔡晓禹, 蔡明, 张有节, 等. 基于车联网环境的驾驶员反应时间研究[J]. 计算机应用, 2017, 37(): 270-273. |
| Cai Xiao-yu, Cai Ming, Zhang You-jie, et al. Research on driver reaction time in Internet of vehicles environment[J]. Journal of Computer Applications, 2017, 37(Sup.2): 270-273. | |
| 19 | Tang T, Shi W, Shang H, et al. A new car-following model with consideration of inter-vehicle communication[J]. Nonlinear Dynamics, 2014, 76(4): 2017-2023. |
| 20 | Li Y, Sun D, Liu W, et al. Modeling and simulation for microscopic traffic flow based on multiple headway, velocity and acceleration difference[J]. Nonlinear Dynamics, 2011, 66(1/2): 15-28. |
| 21 | Peng G H. Stabilisation analysis of multiple car-following model in traffic flow[J]. Chinese Physics B, 2010, 19(5): 438-445. |
| 22 | Bando M, Hasebe K, Nakayama A, et al. Dynamical model of traffic congestion and numerical simulation[J]. Physical Review E, 1995, 51(2): 1035-1042. |
| 23 | Jiang R, Wu Q S, Zhu Z J. Full velocity difference model for a car-following theory[J]. Physical Review E Statistcal Nonlinear and Soft Matter Physics, 2001, 64(1): 017010. |
| [1] | 陈永恒,杨家伟,孙经宇. 借道左转交叉口的网联左转车辆最佳轨迹控制[J]. 吉林大学学报(工学版), 2025, 55(2): 614-622. |
| [2] | 马书红,张俊杰,陈西芳,廖国美. 利用出租车时序数据识别城市功能区[J]. 吉林大学学报(工学版), 2025, 55(2): 603-613. |
| [3] | 何永明,冯佳,魏堃,万亚楠. 超高速公路曲线路段车辆制动侧滑影响因素分析[J]. 吉林大学学报(工学版), 2025, 55(2): 591-602. |
| [4] | 金盛,李博林,薛炜. 智能网联车借用公交专用道的轨迹与信号协同优化[J]. 吉林大学学报(工学版), 2025, 55(2): 566-576. |
| [5] | 吴娇蓉,刘旭东. 不同住房类型空间单元的建成环境对通勤方式选择的影响分析[J]. 吉林大学学报(工学版), 2025, 55(2): 554-565. |
| [6] | 高天洋,胡大伟,姜瑞森,吴雪,刘慧甜. 基于模块化车辆的区域灵活接驳公交线路优化[J]. 吉林大学学报(工学版), 2025, 55(2): 537-545. |
| [7] | 潘义勇,尤逸文,吴静婷. 换道事故严重程度影响因素异质性和可转移性分析[J]. 吉林大学学报(工学版), 2025, 55(2): 520-528. |
| [8] | 孙峣,姚宝珍,白子建. 基于随机森林模型的交通拥堵疏导效果评估[J]. 吉林大学学报(工学版), 2025, 55(2): 512-519. |
| [9] | 陈发城,鲁光泉,林庆峰,张浩东,马社强,刘德志,宋会军. 有条件自动驾驶下驾驶人接管行为综述[J]. 吉林大学学报(工学版), 2025, 55(2): 419-433. |
| [10] | 姚荣涵,祁文彦,胡宏宇,杜筱婧,乔延峰,王立冰. 考虑公交-合乘车道的多车道元胞自动机模型[J]. 吉林大学学报(工学版), 2025, 55(1): 162-174. |
| [11] | 李德林,陈俊先,王永岗,王露,沈照庆. 基于潜在类别模型的急陡弯路段驾驶行为辨析[J]. 吉林大学学报(工学版), 2024, 54(12): 3526-3533. |
| [12] | 魏丽英,彭欢欢. 城市群内部出行强度的距离衰减效应[J]. 吉林大学学报(工学版), 2024, 54(11): 3199-3208. |
| [13] | 常玉林,王逸杰,王建,孙超,张鹏,徐文倩. 考虑定制公交及公交专用道的混合逐日均衡模型[J]. 吉林大学学报(工学版), 2024, 54(11): 3209-3219. |
| [14] | 徐进,陈正欢,廖祺硕,郑展骥,张河山. 基于心电数据的高速公路高密度互通立交驾驶负荷[J]. 吉林大学学报(工学版), 2024, 54(10): 2807-2818. |
| [15] | 潘义勇,吴静婷,缪炫烨. 老年驾驶员事故严重程度影响因素时间不稳定性分析[J]. 吉林大学学报(工学版), 2024, 54(10): 2819-2826. |
|
||