吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (3): 663-673.doi: 10.13229/j.cnki.jdxbgxb20220895
• 通信与控制工程 • 上一篇
基于摄像头和车道线的增强定位系统
何科( ),丁海涛,许男,郭孔辉
),丁海涛,许男,郭孔辉
- 吉林大学 汽车工程学院,长春 130022
Enhanced localization system based on camera and lane markings
Ke HE(),Hai-tao DING,Nan XU,Kong-hui GUO
- College of Automotive Engineering,Jilin University,Changchun 130022,China
摘要:
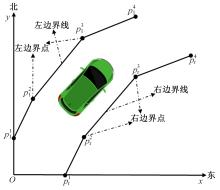
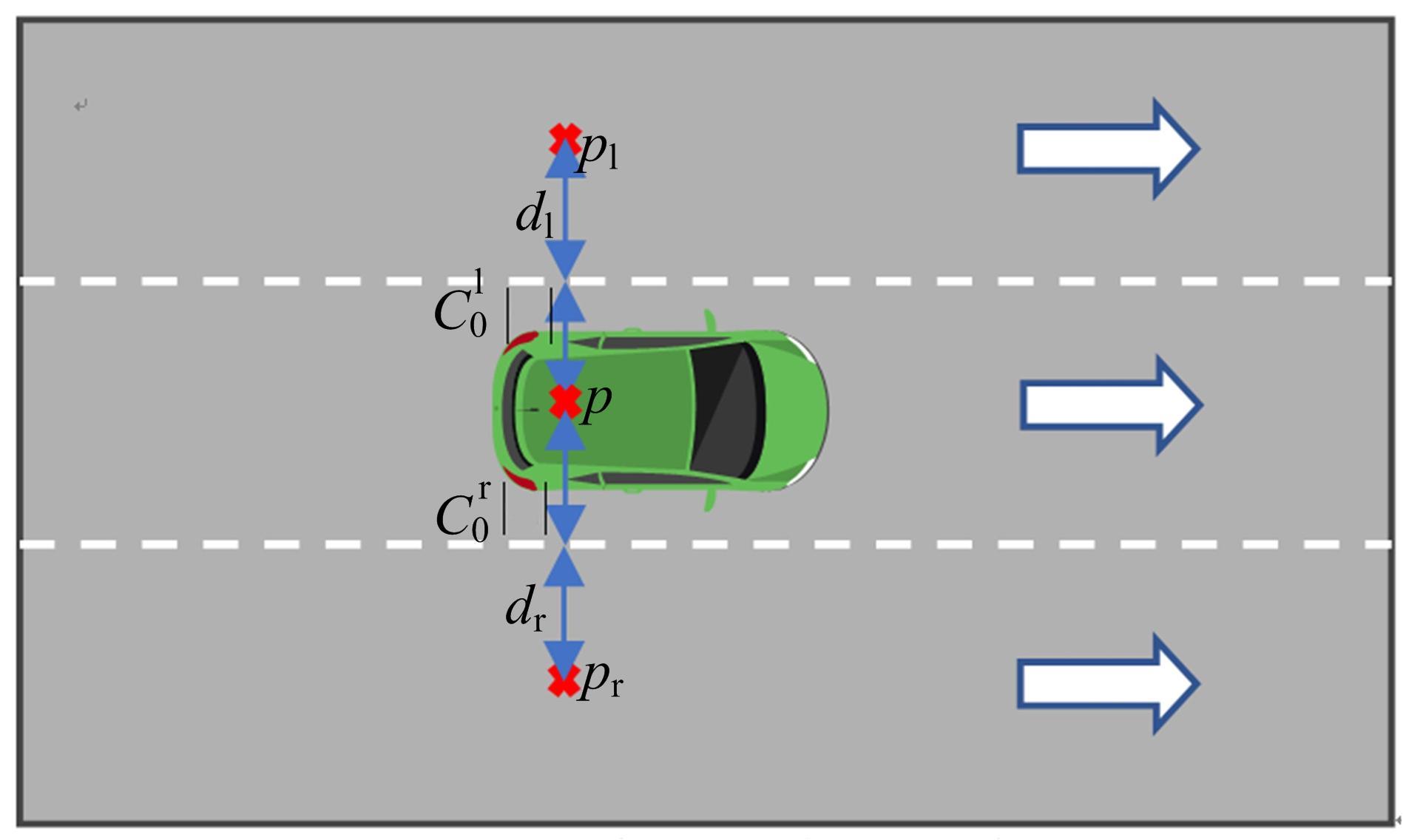
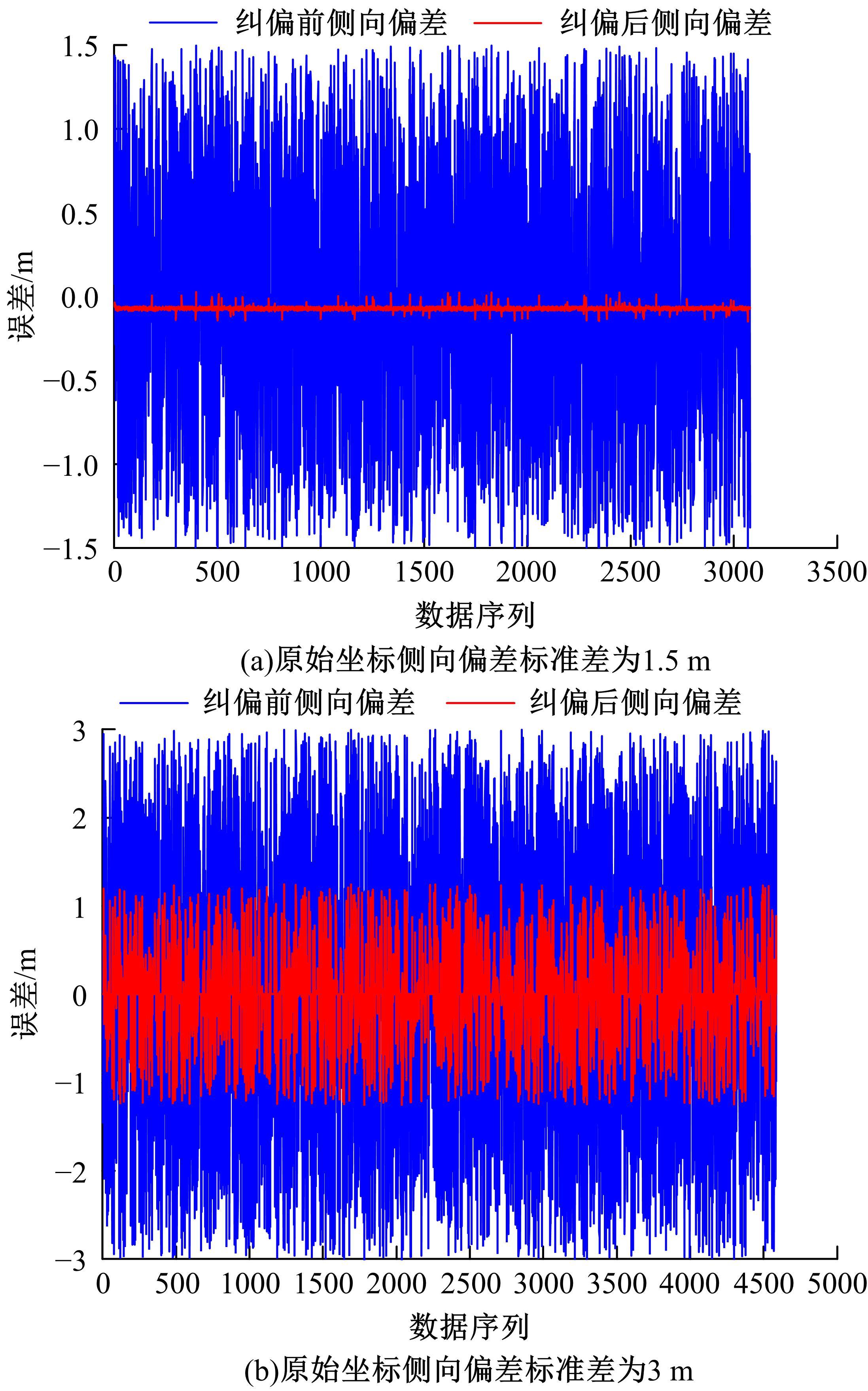
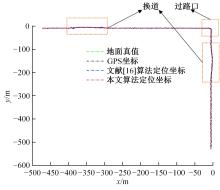
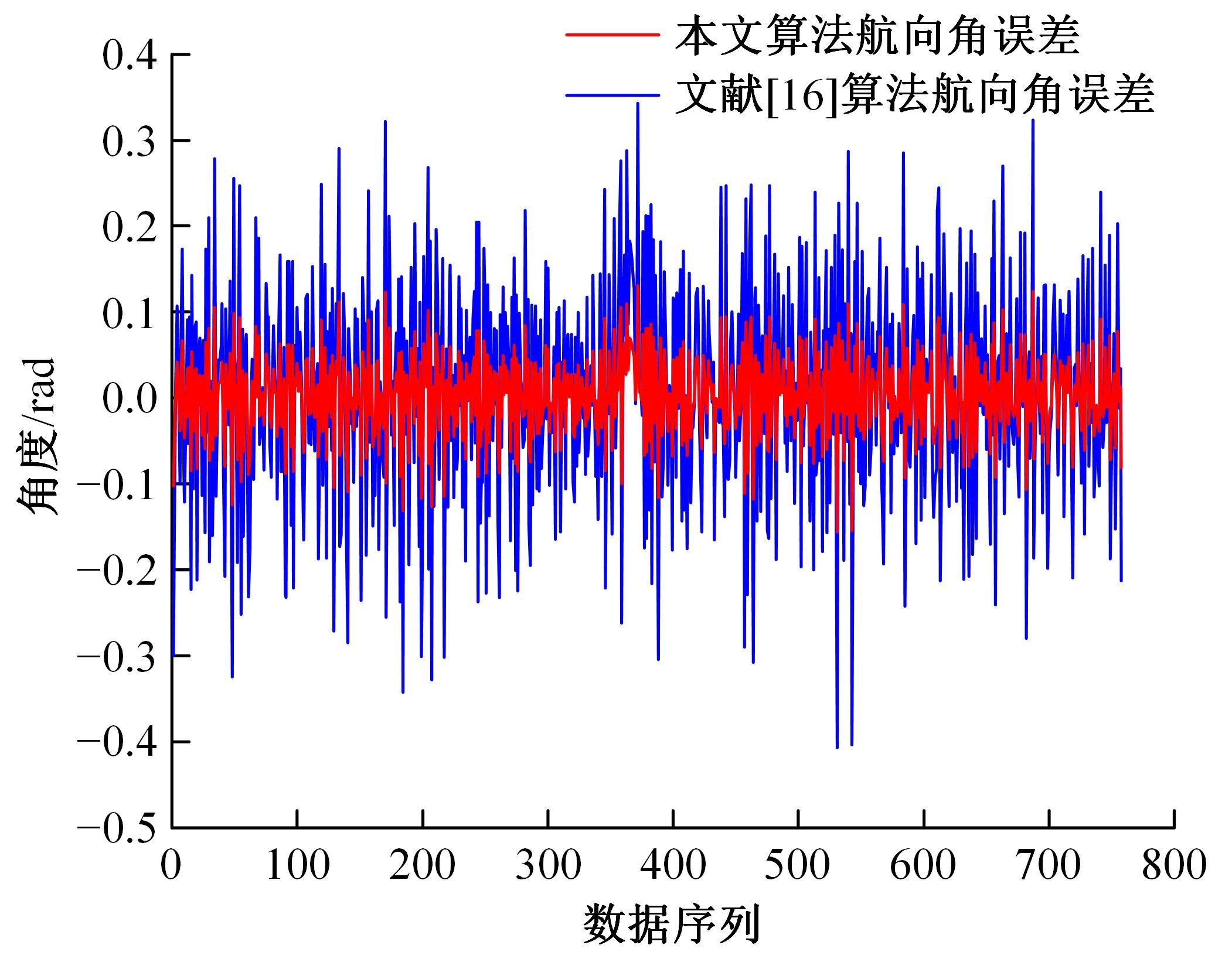
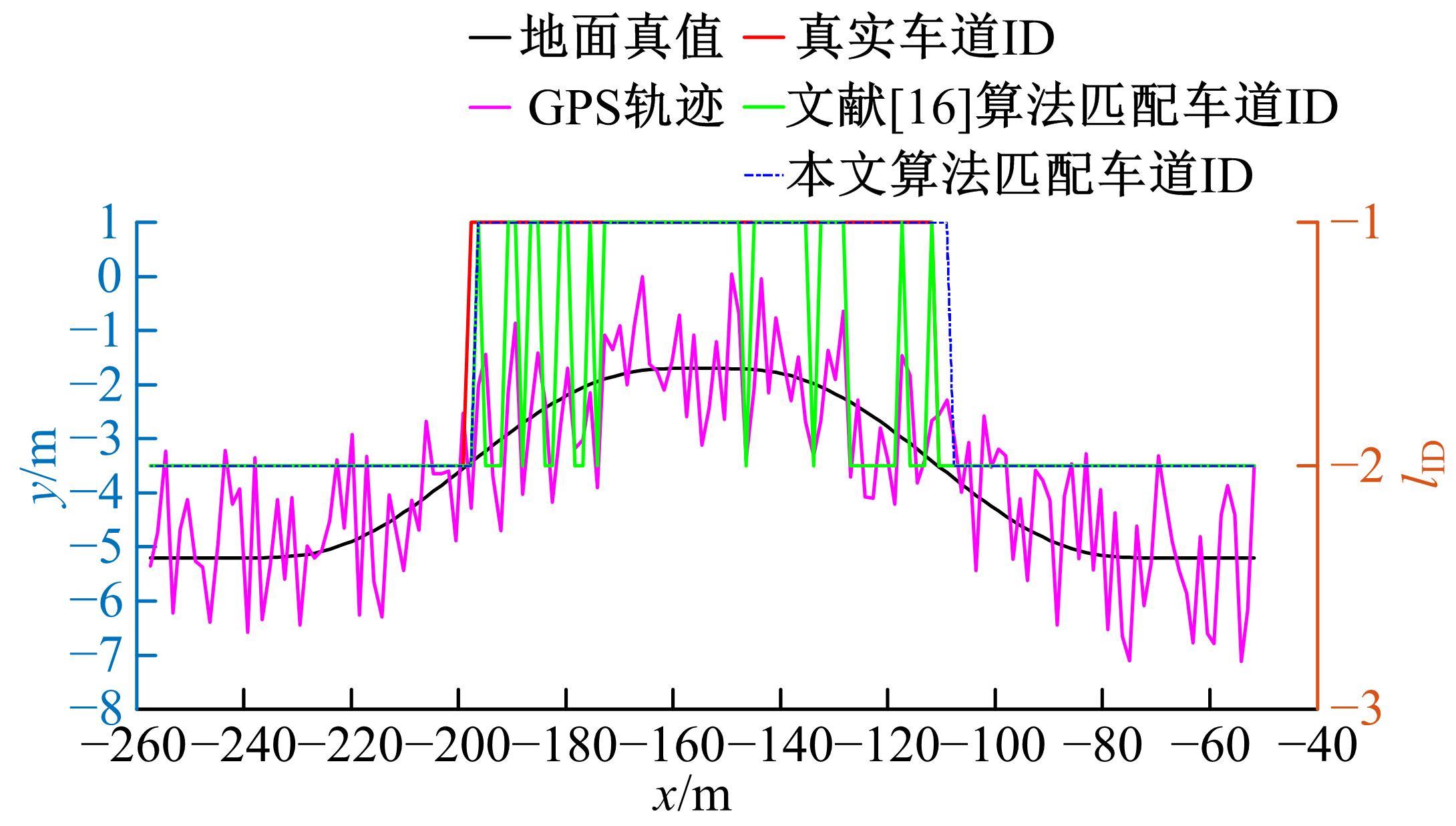
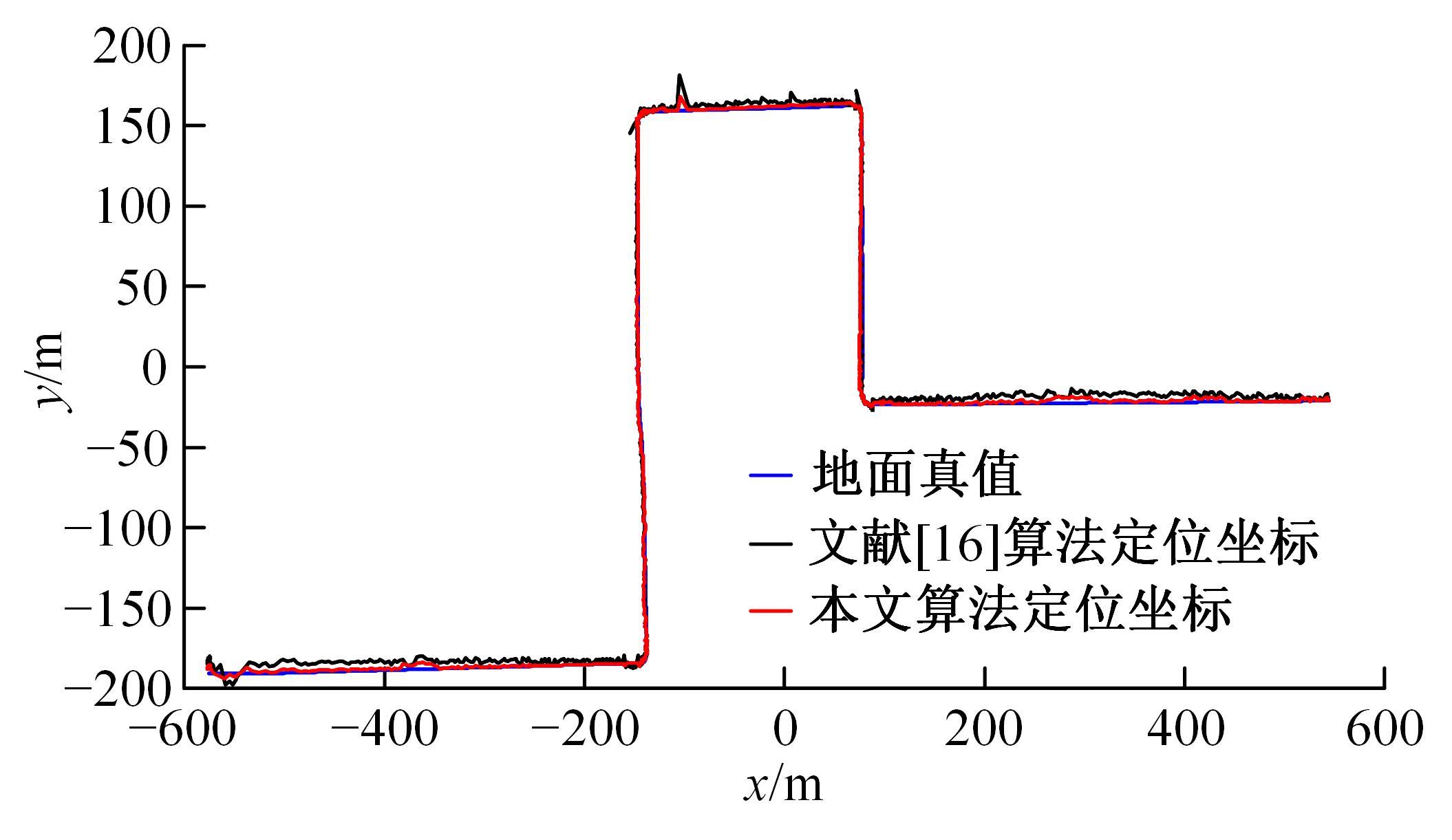
针对传统利用摄像头识别的车道线侧向定位技术中,因车道或者其左右边界点匹配错误导致换道等工况下行驶易造成较大定位误差的问题,本文结合换道识别方法,首先提出了多指标加权评价地图匹配算法,设计了车道左右边界点确定方法;然后,在准确匹配到车道和其边界点的基础上,提出了一种基于摄像头的双边界线侧向定位方法,提高了车辆相对车道的侧向定位精度;最后,将摄像头与全球定位系统(GPS)、惯性测量单元(IMU)、轮式里程计和轻量化车道级地图融合形成一个完整的定位系统。实验结果表明,与传统利用摄像头与车道线融合定位方法相比,本文设计的定位系统精度和稳定性有了明显提升,为自动驾驶定位提供了一种低成本、高精度的解决方案。
中图分类号:
- U469.79













| 1 | 高振海, 孙天骏, 何磊. 汽车纵向自动驾驶的因果推理型决策[J]. 吉林大学学报: 工学版, 2019, 49(5): 1392-1404. |
| Gao Zhen-hai, Sun Tian-jun, He Lei. Causal reasoning decision⁃making for vehicle longitudinal automatic driving[J]. Journal of Jilin University (Engineering and Technology Edition), 2019, 49(5): 1392-1404. | |
| 2 | Jo K, Kim J, Kim D, et al. Development of autonomous car-part I: distributed system architecture and development process[J]. IEEE Transactions on Industrial Electronics, 2014, 61(12): 7131-7140. |
| 3 | Lu W, Rodríguez F S A, Seignez E, et al. Lane marking-based vehicle localization using low-cost GPS and open source map[J]. Unmanned Systems, 2015, 3(4): 239-251. |
| 4 | Xu L H, Hu S G, Luo Q. A new lane departure warning algorithm considering the driver's behavior characteristics[J]. Mathematical Problems in Engineering, 2015, 8: 1-11. |
| 5 | Levinson J, Montemerlo M, Thrun S.Map-based precision vehicle localization in urban environments[J]. Robotics: Science and Systems, 2007, 3: 121-128. |
| 6 | 秦晓辉, 王哲文, 庞涛, 等. 基于车辆模型紧耦合的封闭园区车辆定位方法[J]. 汽车工程, 2021, 43(9):1328-1335. |
| Qin Xiao-hui, Wang Zhe-wen, Pang Tao, et al. Vehicle positioning method based on tight coupling of vehicle model in enclosed environments[J]. Automotive Engineering, 2021, 43(9): 1328-1335. | |
| 7 | Kubo N, Suzuki T. Performance improvement of RTK-GNSS with IMU and vehicle speed sensors in an urban environment[J]. IEICE Transactions on Fundamentals of Electronics, Communications and Computer Sciences, 2016, 99(1): 217-224. |
| 8 | 何永明, 陈世升, 冯佳, 等. 基于高精地图的超高速公路虚拟轨道系统[J/OL]. [2022-07-03]. |
| 9 | Hata A Y, Wolf D F. Feature detection for vehicle localization in urban environments using a multilayer LIDAR[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 17(2): 420-429. |
| 10 | Castorena J, Agarwal S. Ground-edge-based LIDAR localization without a reflectivity calibration for autonomous driving[J]. IEEE Robotics and Automation Letters, 2017, 3(1): 344-351. |
| 11 | Wolcott R W, Eustice R M. Robust LIDAR localization using multiresolution Gaussian mixture maps for autonomous driving[J]. The International Journal of Robotics Research, 2017, 36(3): 292-319. |
| 12 | Rose C, Britt J, Allen J, et al. An integrated vehicle navigation system utilizing lane-detection and lateral position estimation systems in difficult environments for GPS[J]. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(6): 2615-2629. |
| 13 | Tao Z, Bonnifait P, Fremont V, et al. Mapping and localization using GPS, lane markings and proprioceptive sensors[C]∥2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 2013: 406-412. |
| 14 | Tao Z, Bonnifait P, Fremont V, et al. Lane marking aided vehicle localization[C]∥16th International IEEE Conference on Intelligent Transportation Systems, Hague, Netherlands, 2013: 1509-1515. |
| 15 | El Najjar M E, Bonnifait P. A road-matching method for precise vehicle localization using belief theory and kalman filtering[J]. Autonomous Robots, 2005, 19(2): 173-191. |
| 16 | Tao Z, Bonnifait P, Frémont V, et al. Road‐centered map‐aided localization for driverless cars using single‐frequency GNSS receivers[J]. Journal of Field Robotics, 2017, 34(5): 1010-1033. |
| 17 | Mohamed S A S, Haghbayan M H, Westerlund T, et al. A survey on odometry for autonomous navigation systems[J]. IEEE Access, 2019, 7: 97466-97486. |
| 18 | Hashemi M, Karimi H A. A critical review of real-time map-matching algorithms: current issues and future directions[J]. Computers, Environment and Urban Systems, 2014, 48: 153-165. |
| 19 | Zhao X, Cheng X, Zhou J, et al. Advanced topological map matching algorithm based on D-S theory[J]. Arabian Journal for Science and Engineering, 2018, 43(8): 3863-3874. |
| 20 | Hansson A, Korsberg E, Maghsood R, et al. Lane-level map matching based on HMM[J]. IEEE Transactions on Intelligent Vehicles, 2020, 6(3): 430-439. |
| 21 | That T N, Casas J. An integrated framework combining a traffic simulator and a driving simulator[J]. Procedia-Social and Behavioral Sciences, 2011, 20: 648-655. |
| 22 | Kanakagiri A. Development of a virtual simulation environment for autonomous driving using digital twins[D]. Ingolstadt: Technische Hochschule Ingolstadt International Automotive Engineering, 2021. |
| [1] | 何科,丁海涛,赖宣淇,许男,郭孔辉. 基于Transformer的轮式里程计误差预测模型[J]. 吉林大学学报(工学版), 2023, 53(3): 653-662. |
| [2] | 王登峰,陈宏利,那景新,陈鑫. 单双搭接接头经高温老化后的失效对比[J]. 吉林大学学报(工学版), 2023, 53(2): 346-354. |
| [3] | 时小虎,吴佳琦,吴春国,程石,翁小辉,常志勇. 基于残差网络的弯道增强车道线检测方法[J]. 吉林大学学报(工学版), 2023, 53(2): 584-592. |
| [4] | 张佩,王志伟,杜常清,颜伏伍,卢炽华. 车用质子交换膜燃料电池空气系统过氧比控制方法[J]. 吉林大学学报(工学版), 2022, 52(9): 1996-2003. |
| [5] | 王克勇,鲍大同,周苏. 基于数据驱动的车用燃料电池故障在线自适应诊断算法[J]. 吉林大学学报(工学版), 2022, 52(9): 2107-2118. |
| [6] | 曹起铭,闵海涛,孙维毅,于远彬,蒋俊宇. 质子交换膜燃料电池低温启动水热平衡特性[J]. 吉林大学学报(工学版), 2022, 52(9): 2139-2146. |
| [7] | 隗海林,王泽钊,张家祯,刘洋. 基于Avl-Cruise的燃料电池汽车传动比及能量管理策略[J]. 吉林大学学报(工学版), 2022, 52(9): 2119-2129. |
| [8] | 刘岩,丁天威,王宇鹏,都京,赵洪辉. 基于自适应控制的燃料电池发动机热管理策略[J]. 吉林大学学报(工学版), 2022, 52(9): 2168-2174. |
| [9] | 李丞,景浩,胡广地,刘晓东,冯彪. 适用于质子交换膜燃料电池系统的高阶滑模观测器[J]. 吉林大学学报(工学版), 2022, 52(9): 2203-2212. |
| [10] | 池训逞,侯中军,魏伟,夏增刚,庄琳琳,郭荣. 基于模型的质子交换膜燃料电池系统阳极气体浓度估计技术综述[J]. 吉林大学学报(工学版), 2022, 52(9): 1957-1970. |
| [11] | 裴尧旺,陈凤祥,胡哲,翟双,裴冯来,张卫东,焦杰然. 基于自适应LQR控制的质子交换膜燃料电池热管理系统温度控制[J]. 吉林大学学报(工学版), 2022, 52(9): 2014-2024. |
| [12] | 胡广地,景浩,李丞,冯彪,刘晓东. 基于高阶燃料电池模型的多目标滑模控制[J]. 吉林大学学报(工学版), 2022, 52(9): 2182-2191. |
| [13] | 陈凤祥,伍琪,李元松,莫天德,李煜,黄李平,苏建红,张卫东. 2.5吨燃料电池混合动力叉车匹配、仿真及优化[J]. 吉林大学学报(工学版), 2022, 52(9): 2044-2054. |
| [14] | 武小花,余忠伟,朱张玲,高新梅. 燃料电池公交车模糊能量管理策略[J]. 吉林大学学报(工学版), 2022, 52(9): 2077-2084. |
| [15] | 高青,王浩东,刘玉彬,金石,陈宇. 动力电池应急冷却喷射模式实验分析[J]. 吉林大学学报(工学版), 2022, 52(8): 1733-1740. |
|
||