吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (3): 704-712.doi: 10.13229/j.cnki.jdxbgxb20211177
• 通信与控制工程 • 上一篇
基于危险边界搜索的自动驾驶系统加速测试方法
朱冰( ),范天昕,赵健(),张培兴,孙宇航
),范天昕,赵健(),张培兴,孙宇航
- 吉林大学 汽车仿真与控制国家重点实验室,长春 130022
Accelerate test method of automated driving system based on hazardous boundary search
Bing ZHU(),Tian-xin FAN,Jian ZHAO(),Pei-xing ZHANG,Yu-hang SUN
- State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun 130022,China
摘要:
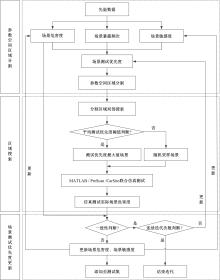
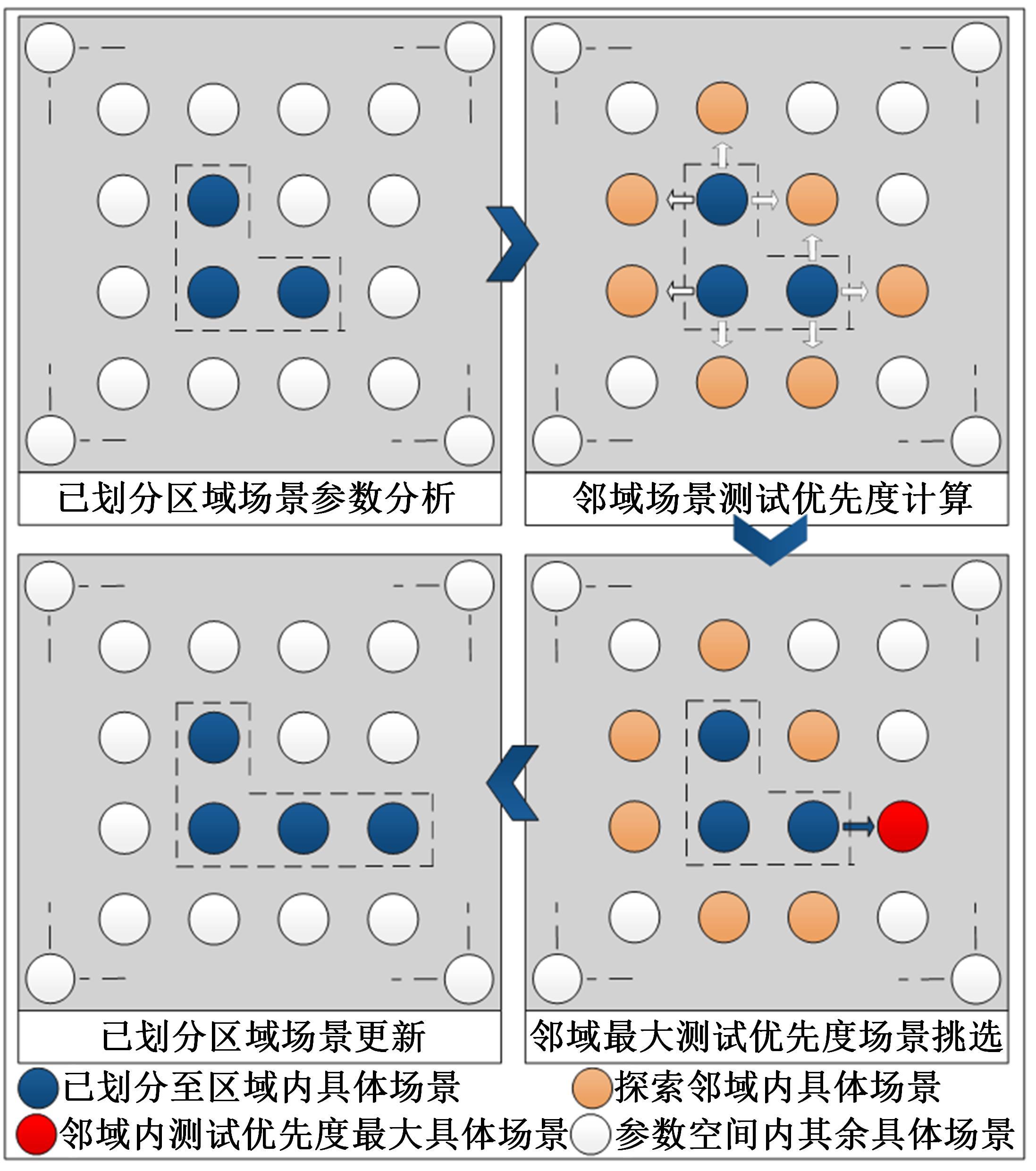
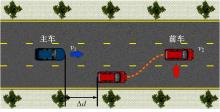
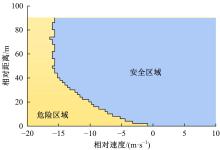
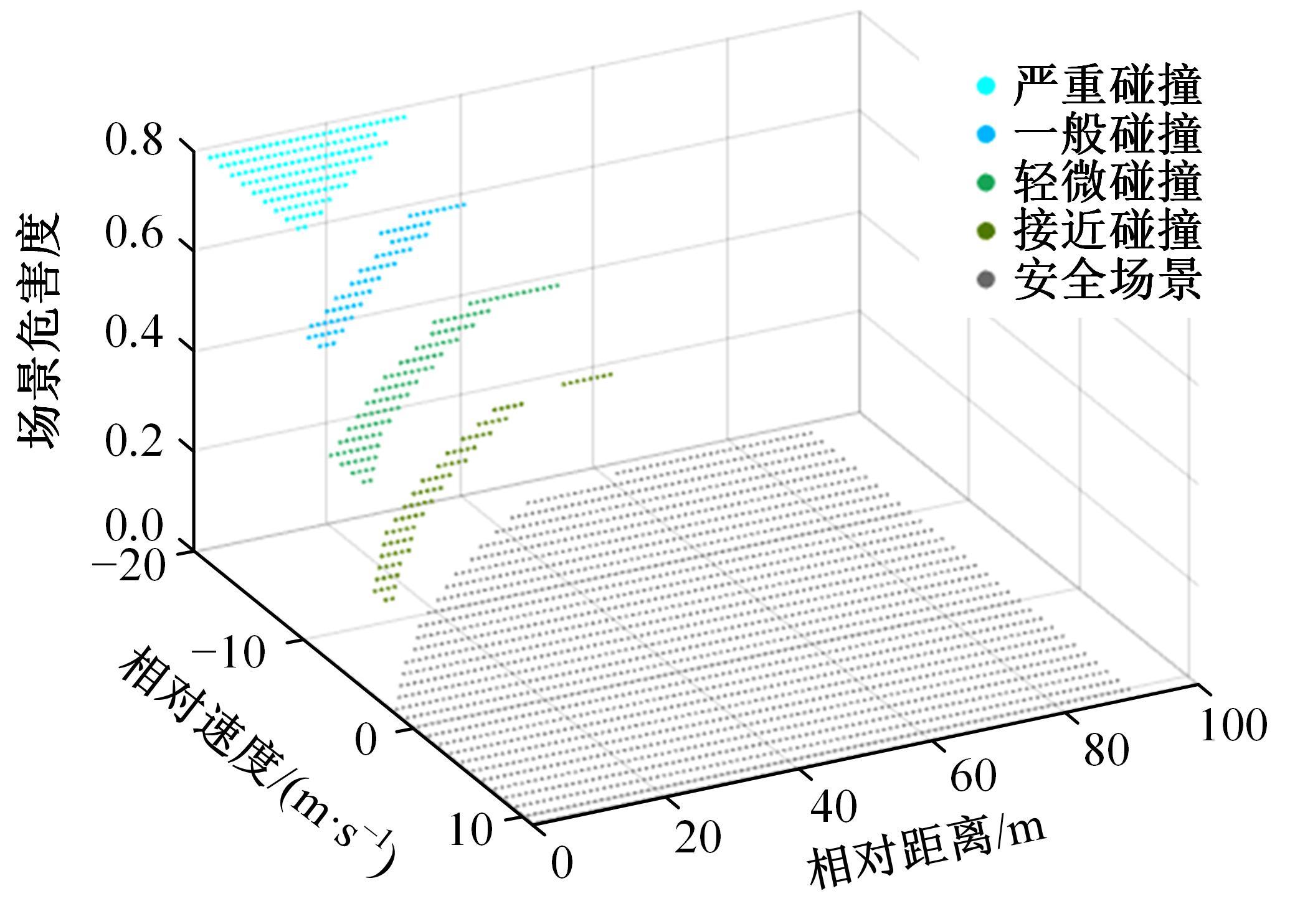
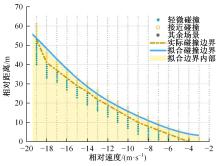
针对现有基于危险场景强化生成的自动驾驶系统加速测试方法探索初期算力浪费、测试过程存在重复等问题,提出了一种基于危险边界搜索的自动驾驶系统加速测试方法。首先,定义场景危害度、场景暴露频次、场景敏感度三类场景固有属性,采用场景测试优先度作为参数空间划分和场景搜索的基础。其次,根据场景测试优先度进行具体场景提取;根据场景实际危害度进行场景测试优先度更新实现实验流程迭代。然后,利用支持向量回归对实验结果进行危险边界拟合。最后,搭建了Matlab/PreScan/CarSim联合仿真平台,选取前车切入典型场景对某黑盒自动驾驶系统进行仿真测试以验证加速测试方法的有效性。结果表明,本文方法可有效搜索被测算法的危险场景边界并提升测试效率。
中图分类号:
- U461.91






| 1 | 余荣杰, 田野, 孙剑. 高等级自动驾驶汽车虚拟测试:研究进展与前沿[J]. 中国公路学报, 2020, 33(11): 125-138. |
| Yu Rong-jie, Tian Ye, Sun Jian. Highly automated vehicle virtual testing: a review of recent developmentsand research frontiers[J]. China Journal of Highway and Transport, 2020, 33(11): 125-138. | |
| 2 | 朱冰, 张培兴, 赵健. 面向多维度逻辑场景的自动驾驶安全性聚类评价方法[J]. 汽车工程, 2020, 316(11): 13-18. |
| Zhu Bing, Zhang Pei-xing, Zhao Jian. Clustering evaluation method of autonomous driving safety for multi-dimensional logical scenario[J]. Automotive Engineering, 2020, 316(11): 13-18. | |
| 3 | Wang C, Storms K, Winner H. Online safety assessment of automated vehicles using silent testing[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 23(8): 13069-13083. |
| 4 | 朱冰, 张培兴, 赵健, 等.基于场景的自动驾驶汽车虚拟测试研究进展[J]. 中国公路学报, 2019, 32(6): 1-19. |
| Zhu Bing, Zhang Pei-xing, Zhao Jian,et al. Research progress on scene-based virtual test of autonomous driving vehicles[J]. China Journal of Highway and Transport, 2019, 32(6): 1-19. | |
| 5 | Riedmaier S, Ponn T, D Ludwig et al. Survey on scenario-based safety assessment of automated vehicles[J]. IEEE Access, 2020, 8: 87456-87477. |
| 6 | Chen W, Kloul L. An advanced driver assistance test cases generation methodology based on highway traffic situation description ontologies[C]∥Knowledge Discovery, Knowledge Engineering and Knowledge Management, Berlin, Germany, 2020:93-113. |
| 7 | 白雪松, 邓伟文, 任秉韬, 等. 一种自动驾驶仿真场景要素的提取方法[J]. 汽车工程, 2021, 43(7): 1030-1036. |
| Bai Xue-song, Deng Wei-wen, Ren Bing-tao, et al. Anextraction method of scenario elements for autonomous driving simulation[J]. Automotive Engineering, 2021, 43(7): 1030-1036. | |
| 8 | Krajewski R, Moers T, Nerger D, et al. Data-driven maneuver modeling using generative adversarial networks and variational autoencoders for safety validation of highly automated vehicles[C]∥The 21st IEEE International Conference on Intelligent Transportation Systems, New York, America, 2018:2383-2390. |
| 9 | Khastgir S, Dhadyalla G, Birrell S, et al. Test scenariogeneration for driving simulators using constrained randomization technique[C]∥SAE World Congress Experience, New York, America, 2017-01-1672. |
| 10 | Huang Z, Lam H, Zhao D. Towards affordable on track testing for autonomous vehicle—a Kriging-based statistical approach[C]∥2017 IEEE 20th International Conference on Intelligent Transportation Systems, NewYork, America, 2017: 1-6. |
| 11 | Schwalb E. Accelerated evaluation of autonomous drivers using neural network quantile generators[C]∥2020 IEEE International Conference on Big Data, New York, America, 2020: 4751-4758. |
| 12 | Zhu B, Zhang P, Zhao J, et al. Hazardous scenario enhanced generation for automated vehicle testing based on optimization searching method[J]. IEEE Transactions on Intelligent Transportation Systems,2021, 99: 1-11. |
| 13 | Zhao D, Lam H, Peng H, et al. Accelerated evaluation of automated vehicles safety in lane-change scenarios based on importance sampling techniques[J]. Transactions on Intelligent Transportation Systems, 2017, 18(3): 595-607. |
| 14 | Jonathan M, Hankey, Miguel A, et al.Dscription of the SHRP 2 naturalistic database and the crash, near-crash, and baseline data sets[R]. New York: Virginia Tech Transportation Institute, 2016. |
| 15 | Minderhoud M M, Bovy P H L. Extended time-to-collision measures for road traffic safety assessment[J]. Accident Analysis and Prevention, 2001, 33(1): 89-97. |
| 16 | Balas V E, Balas M M. Driver assisting by inverse time to collision[C]∥2006 World Automation Congress, Budapest, Hungary, 2006: No.376059. |
| 17 | Butakov V A, Ioannou P A. Driver/vehicle response diagnostic system for the vehicle-following case[J]. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(5): 1947-1957. |
| 18 | 李霖,朱西产,董小飞. 自主紧急制动系统避撞策略的研究[J]. 汽车工程, 2015, 37(2): 168-174. |
| Li Lin, Zhu Xi-chan, Dong Xiao-fei. A research on the collision avoidance strategy for autonomous emergency braking system[J]. Automotive Engineering, 2015, 37(2):168-174. | |
| 19 | Quante L, Zhang M, Preuk K, et al. Human performance in critical scenarios as a benchmark for highly automated vehicles[J]. Automotive Innovation, 2021, 4(3): 274-283. |
| 20 | 吴坚,赵阳,何睿.基于支持向量机回归算法的电子机械制动传感器系统故障诊断[J].吉林大学学报: 工学版, 2013, 43(5):1178-1183. |
| Wu Jian, Zhao Yang, He Rui. Fault detection and diagnosis of EMB sensor system based on SVR[J]. Journalof Jilin University(Engineering and Technology Edition), 2013, 43(5): 1178-1183. | |
| 21 | Feng S, Feng Y, Yu C, et al. Testing scenario librarygeneration for connected and automated vehicles, part I: methodology[J]. IEEE Transactions on Intelligent Transportation Systems, 2021,22(3): 1573-1582. |
| 22 | Doecke S D, Baldock M R J, Kloeden C N,et al. Impact speed and the risk of serious injury in vehicle crashes[J]. Accident Analysis and Prevention, 2020,144:1-7. |
| 23 | Doecke S D, Dutschke J K, Baldock M R J,et al. Travel speed and the risk of serious injury in vehicle crashes[J]. Accident Analysis and Prevention, 2021,161:1-8. |
| 24 | Yong P, Wang X, Peng S, et al. Investigation on the injuries of drivers and copilots in rear-end crashes between trucks based on real world accident data in china[J]. Future Generation Computer Systems, 2017, 86(9):1251-1258. |
| [1] | 田彦涛,许富强,王凯歌,郝子绪. 考虑周车信息的自车期望轨迹预测[J]. 吉林大学学报(工学版), 2023, 53(3): 674-681. |
| [2] | 何科,丁海涛,赖宣淇,许男,郭孔辉. 基于Transformer的轮式里程计误差预测模型[J]. 吉林大学学报(工学版), 2023, 53(3): 653-662. |
| [3] | 田彦涛,季言实,唱寰,谢波. 深度强化学习智能驾驶汽车增广决策模型[J]. 吉林大学学报(工学版), 2023, 53(3): 682-692. |
| [4] | 何科,丁海涛,许男,郭孔辉. 基于摄像头和车道线的增强定位系统[J]. 吉林大学学报(工学版), 2023, 53(3): 663-673. |
| [5] | 王登峰,陈宏利,那景新,陈鑫. 单双搭接接头经高温老化后的失效对比[J]. 吉林大学学报(工学版), 2023, 53(2): 346-354. |
| [6] | 张佩,王志伟,杜常清,颜伏伍,卢炽华. 车用质子交换膜燃料电池空气系统过氧比控制方法[J]. 吉林大学学报(工学版), 2022, 52(9): 1996-2003. |
| [7] | 王克勇,鲍大同,周苏. 基于数据驱动的车用燃料电池故障在线自适应诊断算法[J]. 吉林大学学报(工学版), 2022, 52(9): 2107-2118. |
| [8] | 曹起铭,闵海涛,孙维毅,于远彬,蒋俊宇. 质子交换膜燃料电池低温启动水热平衡特性[J]. 吉林大学学报(工学版), 2022, 52(9): 2139-2146. |
| [9] | 隗海林,王泽钊,张家祯,刘洋. 基于Avl-Cruise的燃料电池汽车传动比及能量管理策略[J]. 吉林大学学报(工学版), 2022, 52(9): 2119-2129. |
| [10] | 刘岩,丁天威,王宇鹏,都京,赵洪辉. 基于自适应控制的燃料电池发动机热管理策略[J]. 吉林大学学报(工学版), 2022, 52(9): 2168-2174. |
| [11] | 李丞,景浩,胡广地,刘晓东,冯彪. 适用于质子交换膜燃料电池系统的高阶滑模观测器[J]. 吉林大学学报(工学版), 2022, 52(9): 2203-2212. |
| [12] | 陈凤祥,伍琪,李元松,莫天德,李煜,黄李平,苏建红,张卫东. 2.5吨燃料电池混合动力叉车匹配、仿真及优化[J]. 吉林大学学报(工学版), 2022, 52(9): 2044-2054. |
| [13] | 武小花,余忠伟,朱张玲,高新梅. 燃料电池公交车模糊能量管理策略[J]. 吉林大学学报(工学版), 2022, 52(9): 2077-2084. |
| [14] | 池训逞,侯中军,魏伟,夏增刚,庄琳琳,郭荣. 基于模型的质子交换膜燃料电池系统阳极气体浓度估计技术综述[J]. 吉林大学学报(工学版), 2022, 52(9): 1957-1970. |
| [15] | 裴尧旺,陈凤祥,胡哲,翟双,裴冯来,张卫东,焦杰然. 基于自适应LQR控制的质子交换膜燃料电池热管理系统温度控制[J]. 吉林大学学报(工学版), 2022, 52(9): 2014-2024. |
|
||