吉林大学学报(工学版) ›› 2019, Vol. 49 ›› Issue (6): 2027-2037.doi: 10.13229/j.cnki.jdxbgxb20180592
机器人末端执行器自更换机构设计及对接策略
马常友1,2( ),高海波1(),丁亮1,于海涛1,邢宏军1,邓宗全1
),高海波1(),丁亮1,于海涛1,邢宏军1,邓宗全1
- 1. 哈尔滨工业大学 机器人技术与系统国家重点实验室,哈尔滨 150080
2. 佳木斯大学 机械工程学院,黑龙江 佳木斯 154007
Mechanism design and docking strategy forend⁃effectors exchange of robot
Chang-you MA1,2(),Hai-bo GAO1(),Liang DING1,Hai-tao YU1,Hong-jun XING1,Zong-quan DENG1
- 1. State Key Laboratory of Robotics and System, Harbin Institute of Technology, Harbin 150080, China
2. College of Mechanical Engineering, Jiamusi University, Jiamusi 154007, China
摘要:
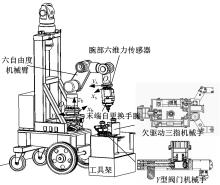
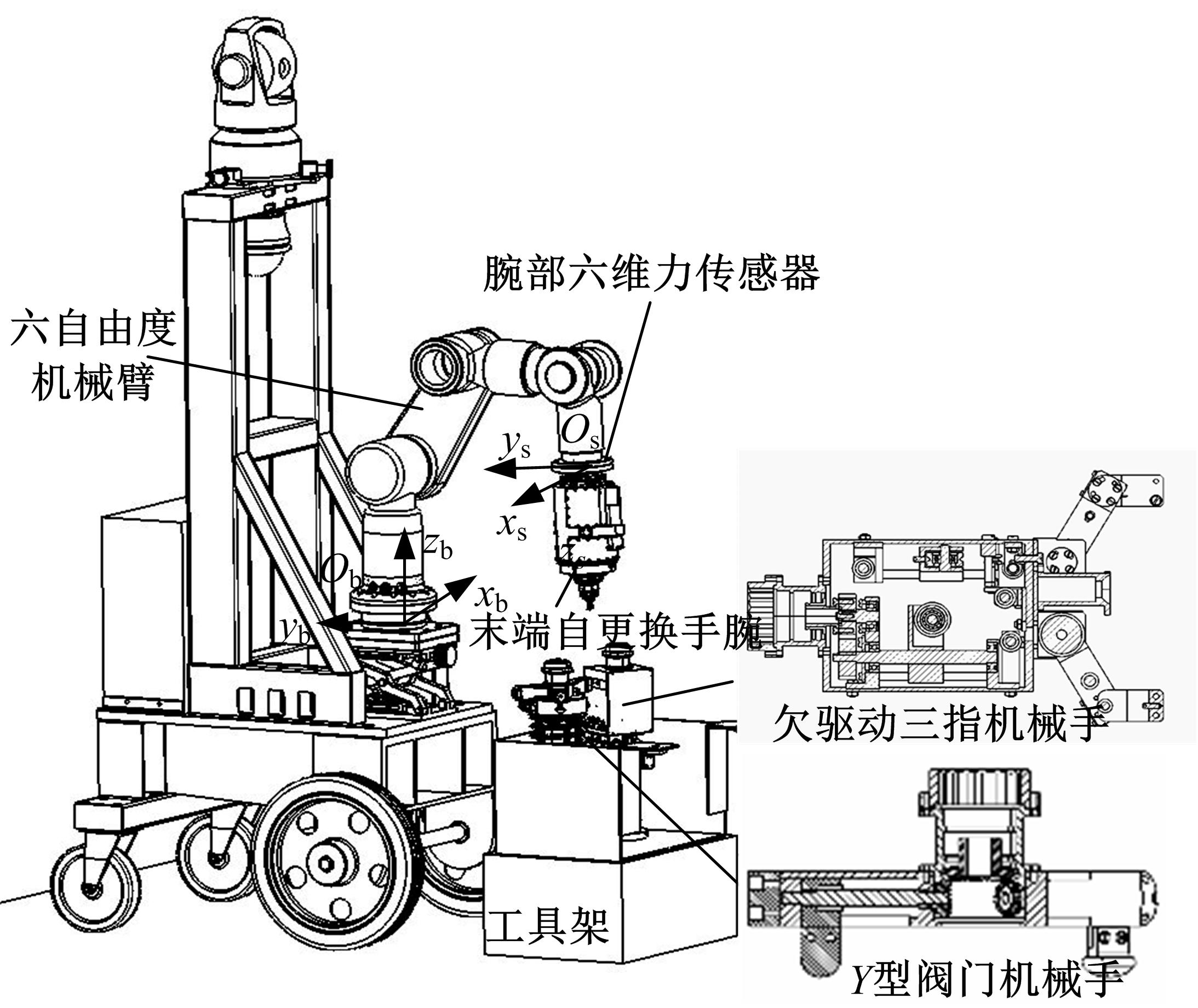
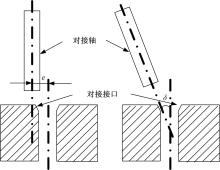
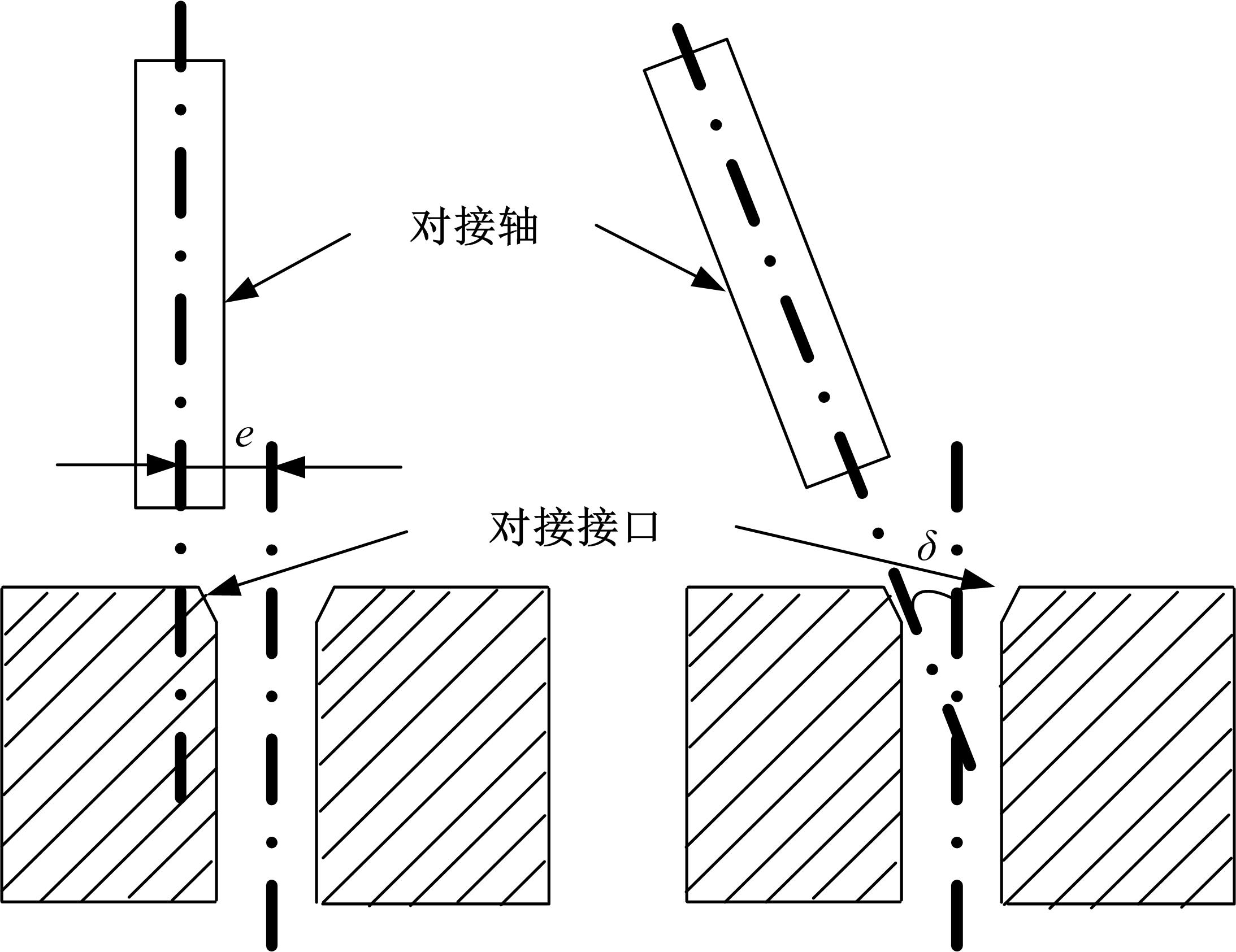
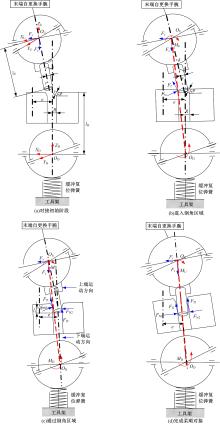
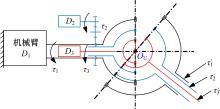
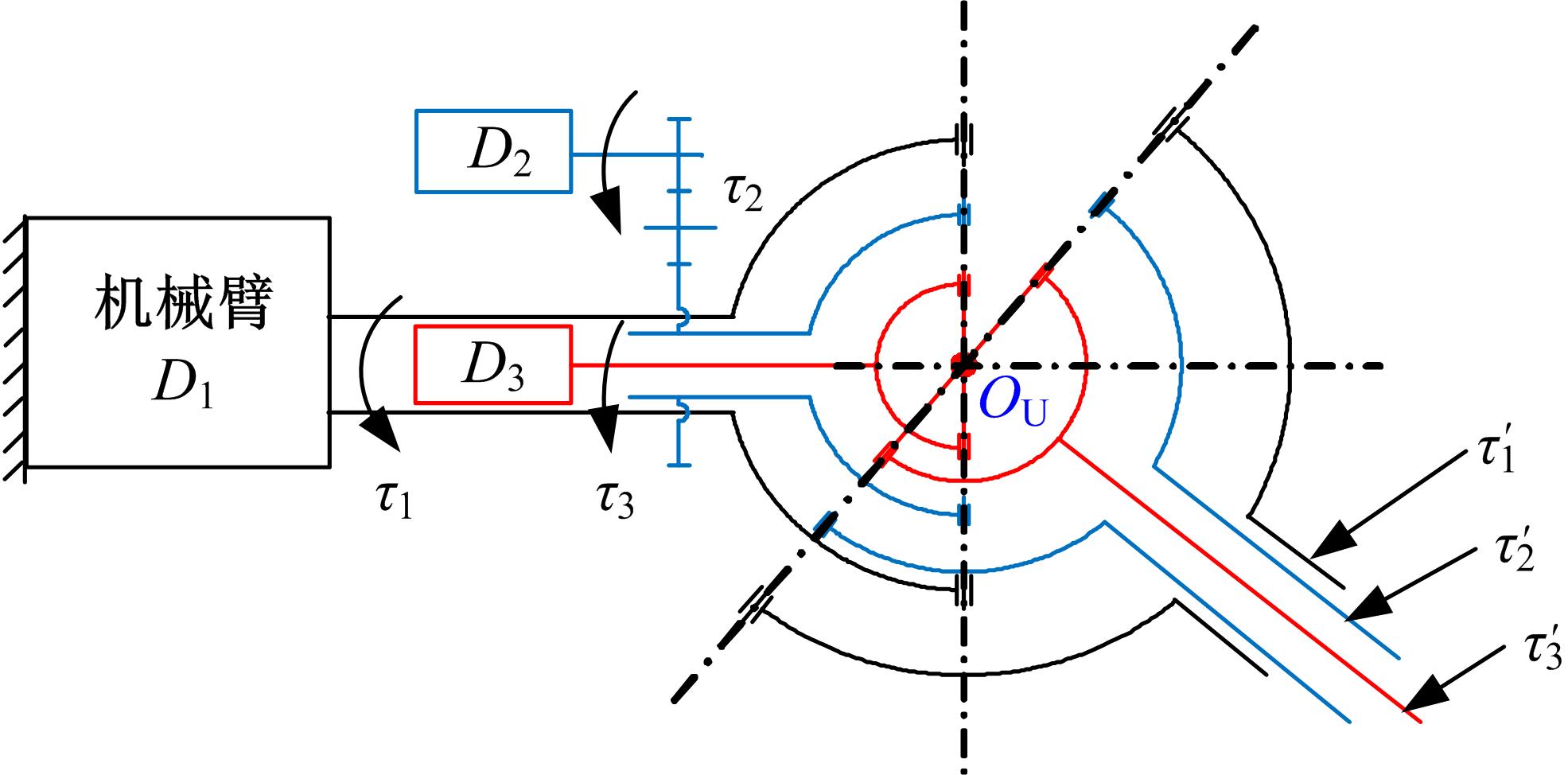
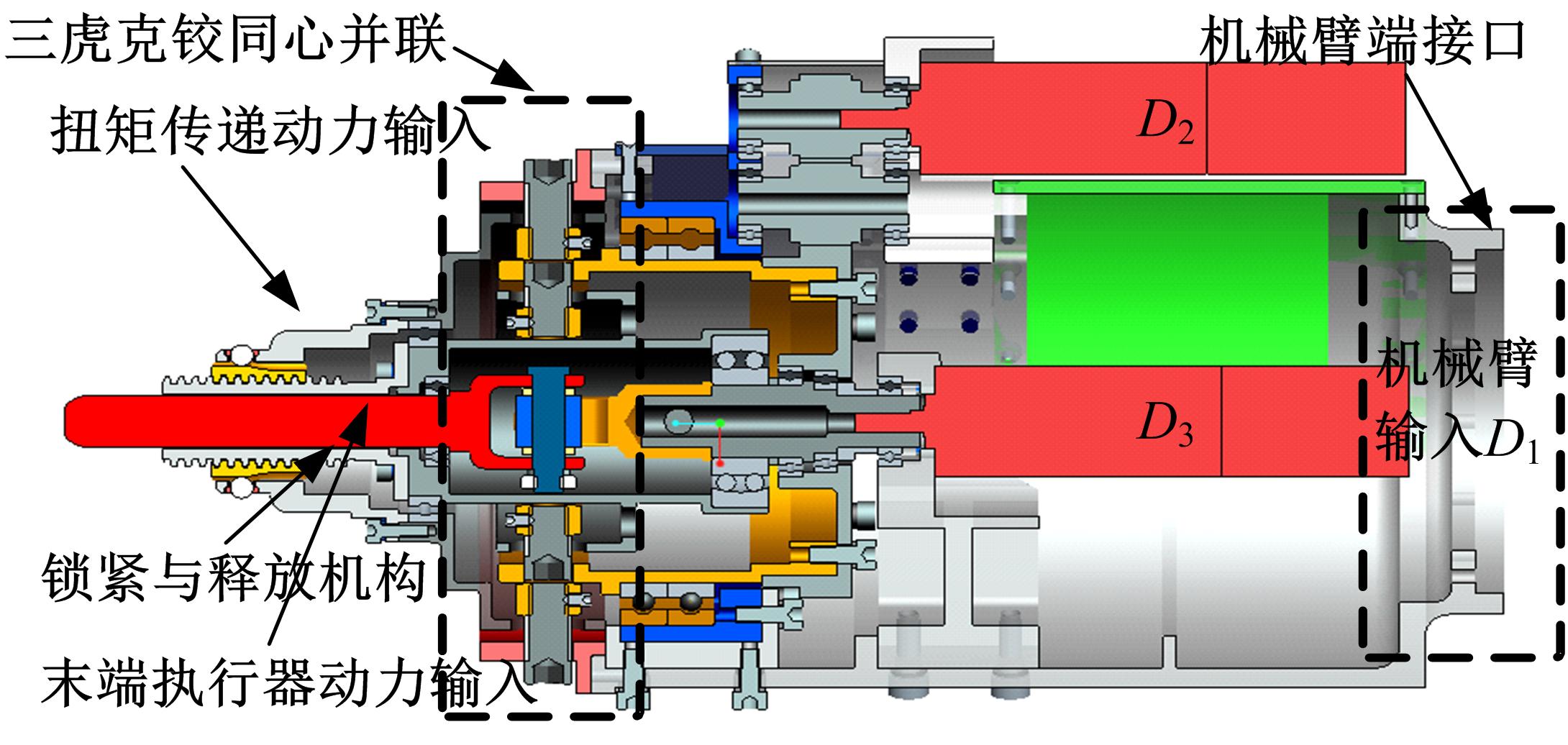
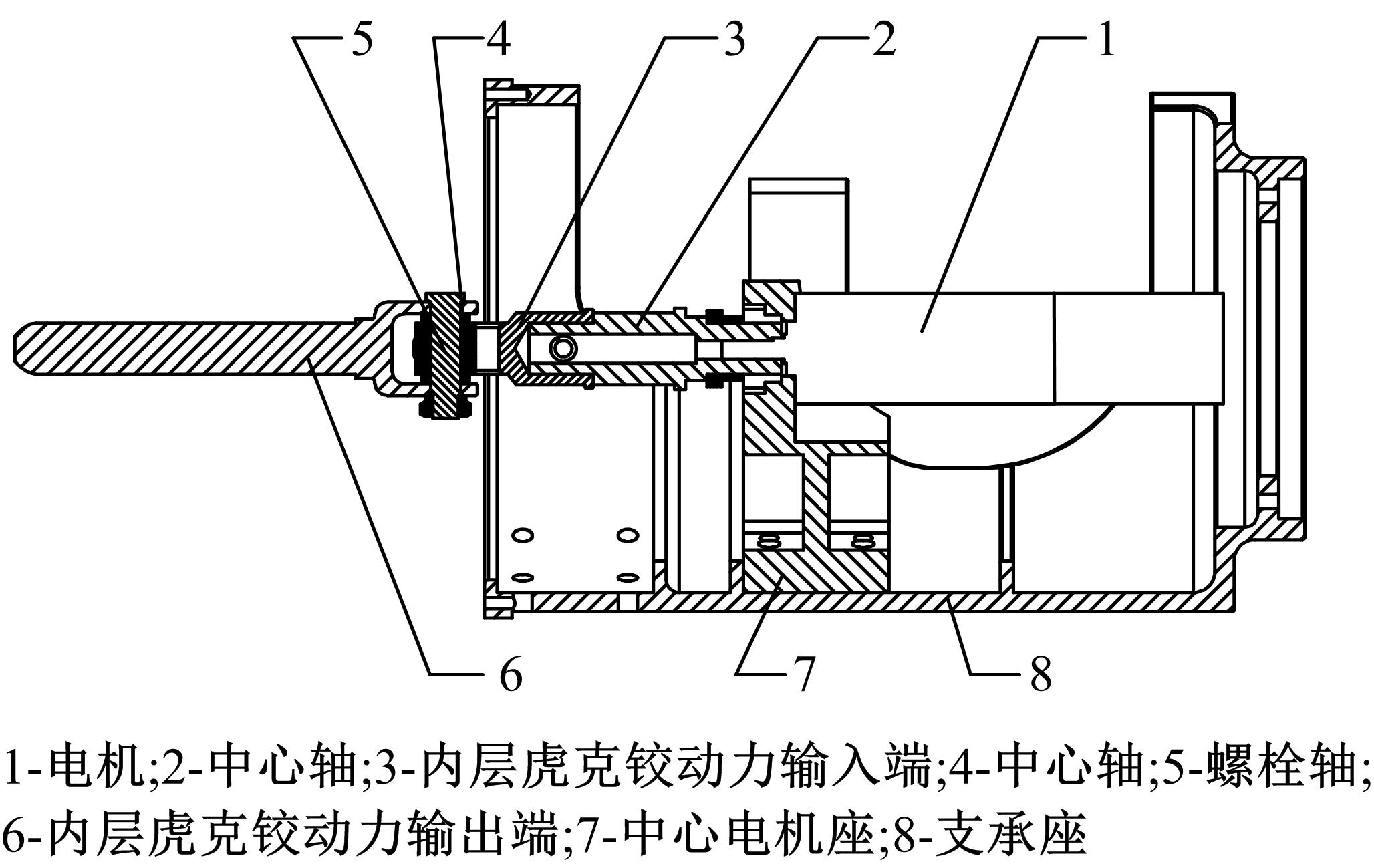
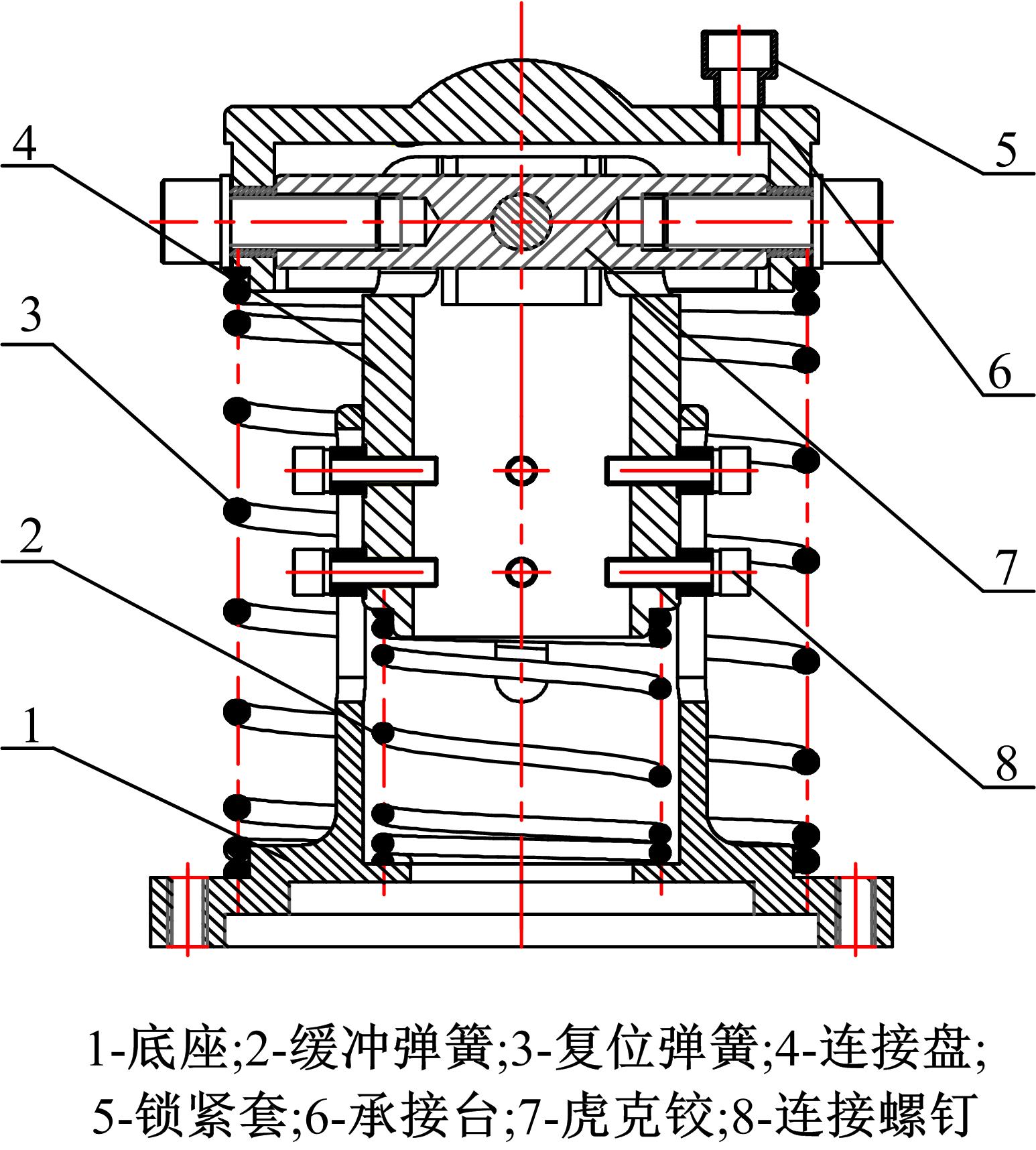
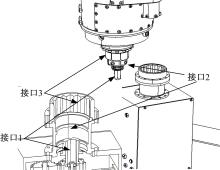
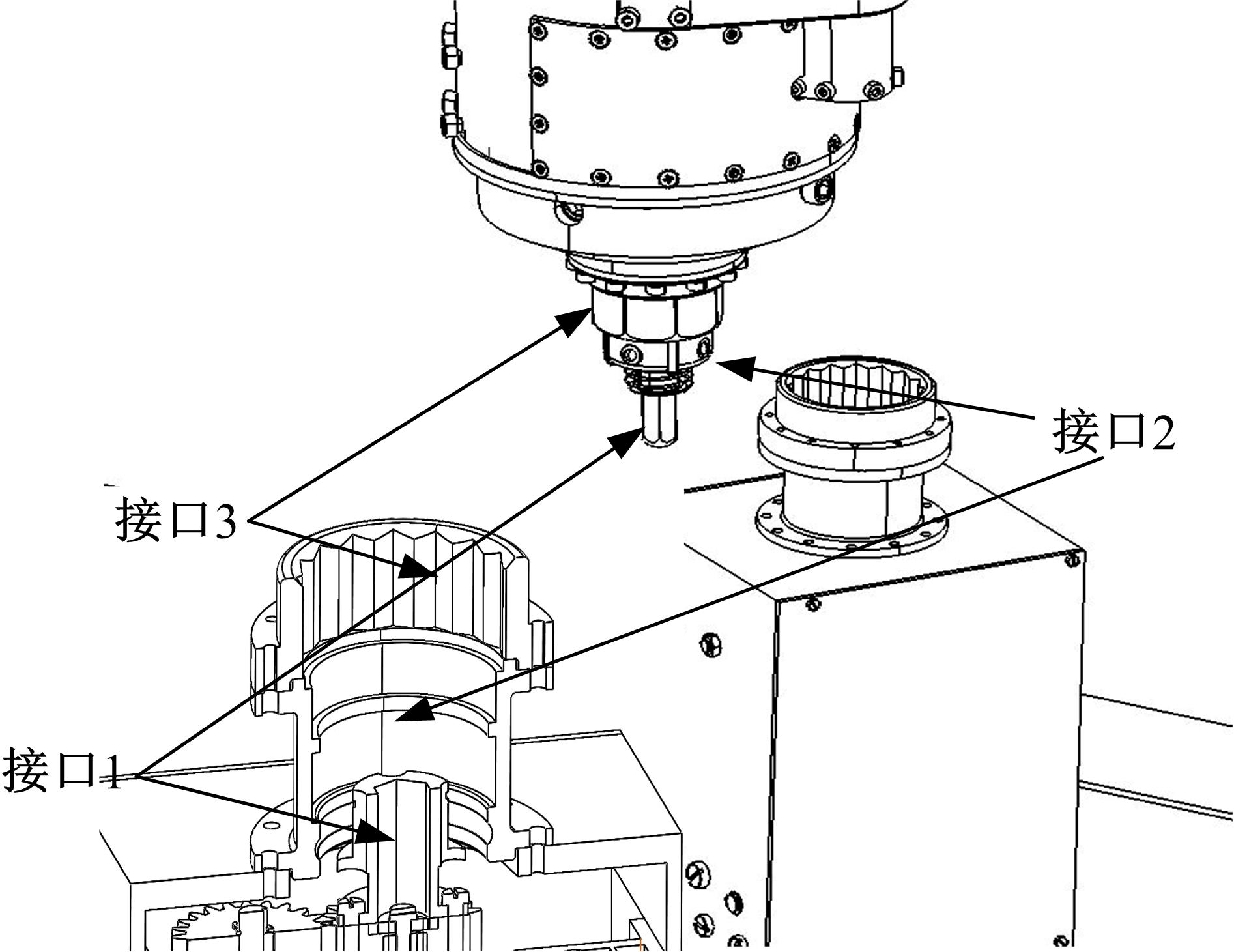
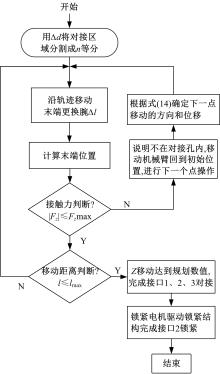
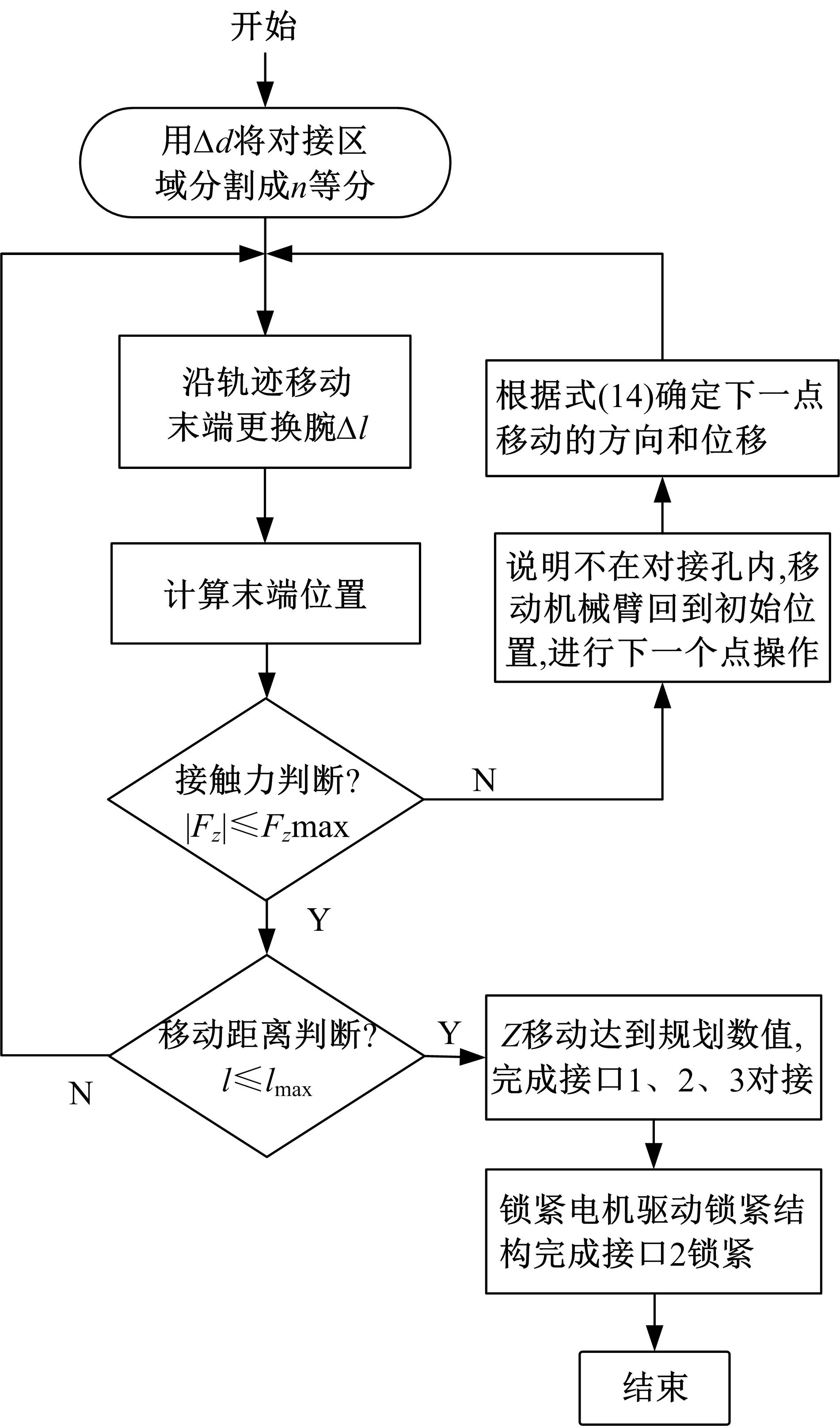
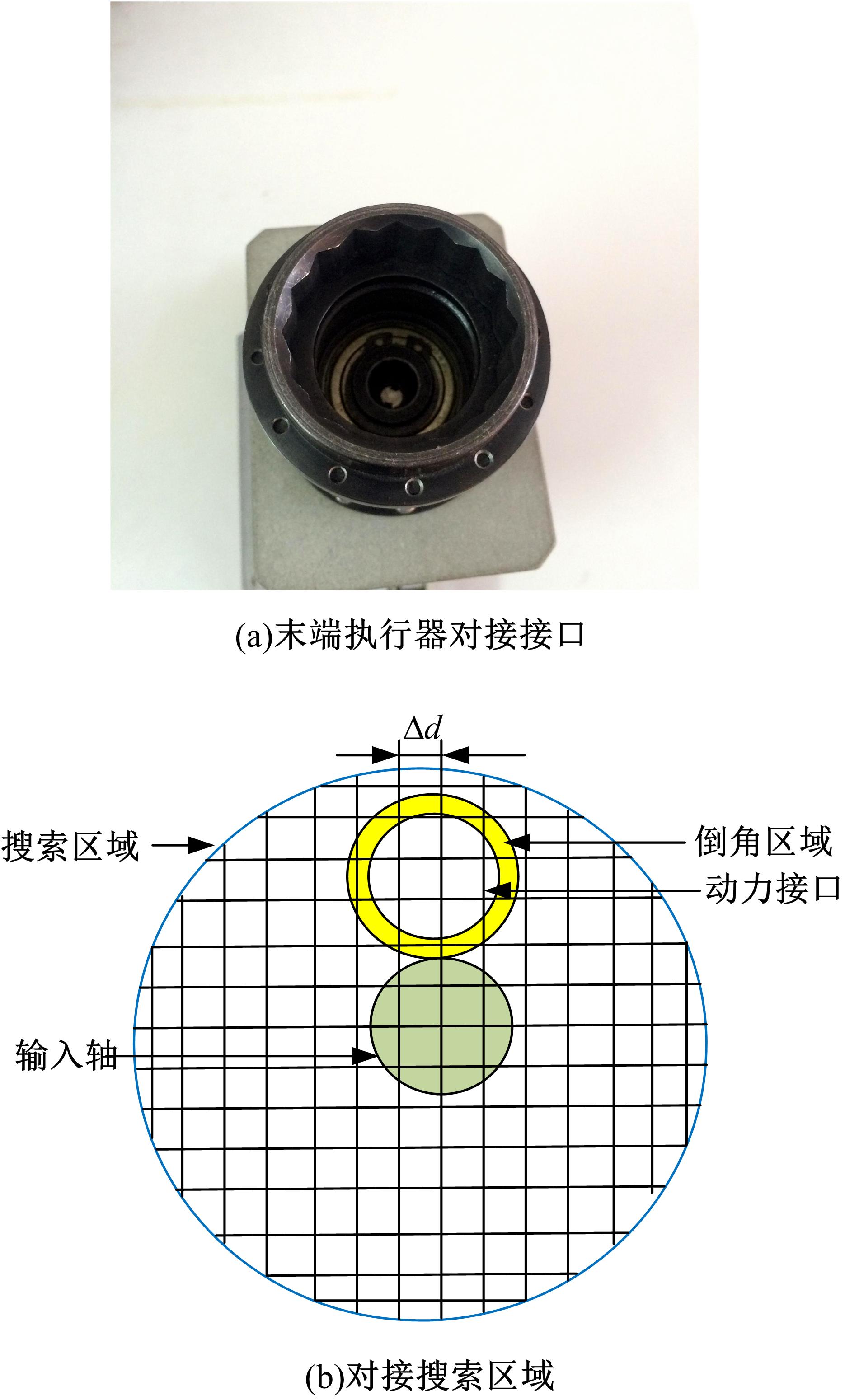
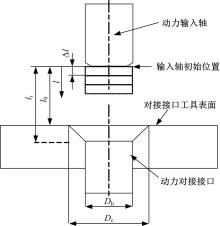
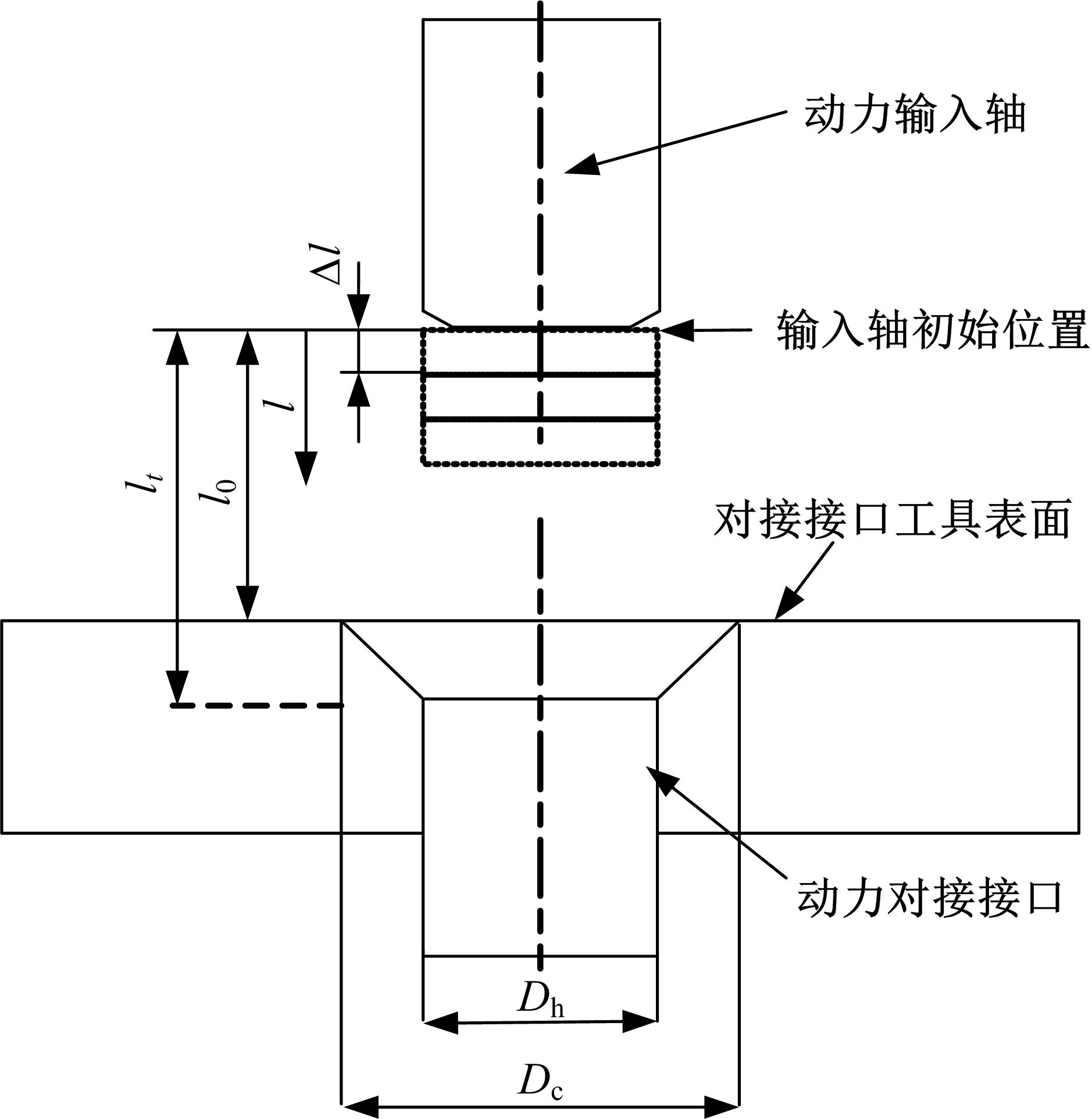
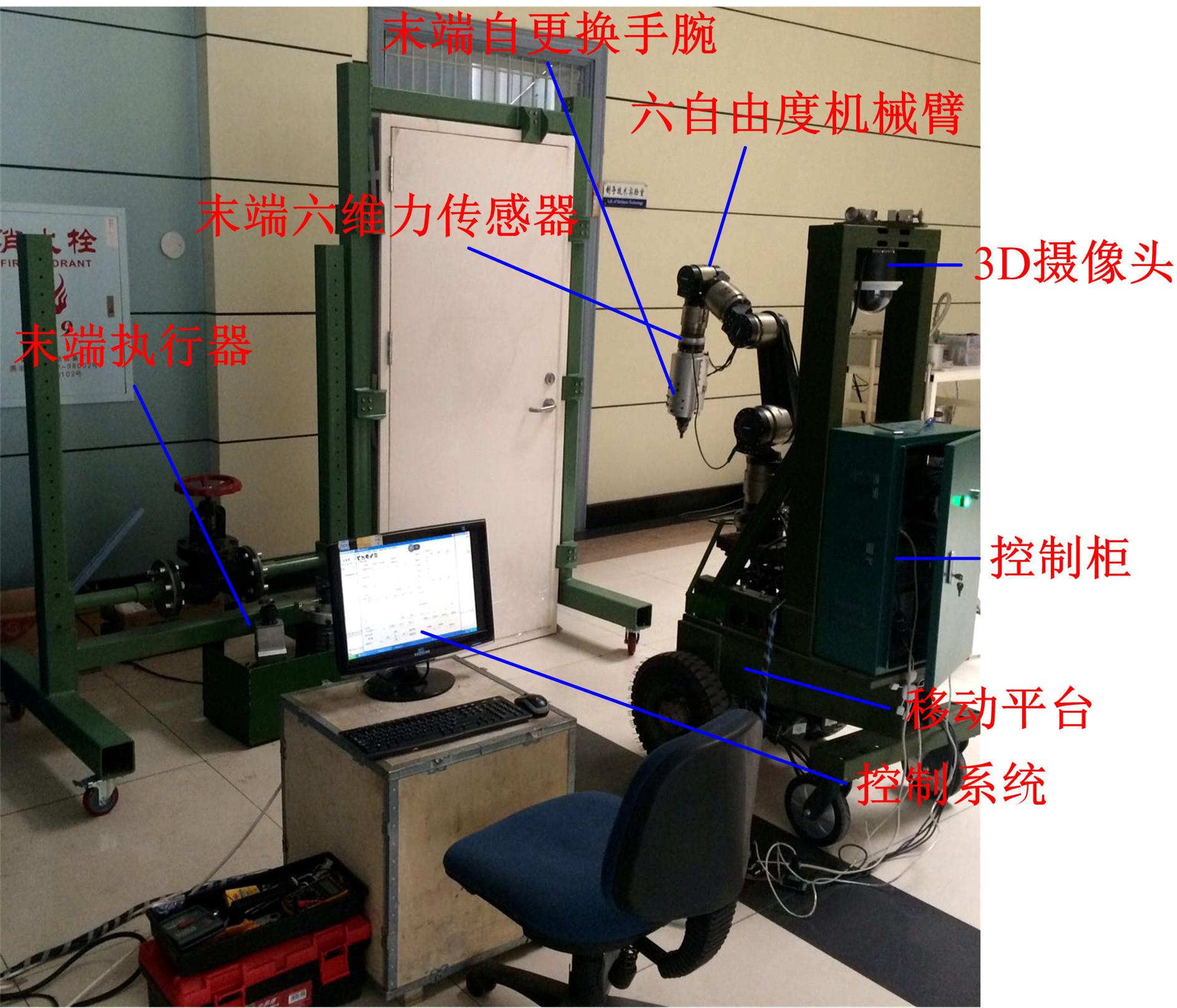
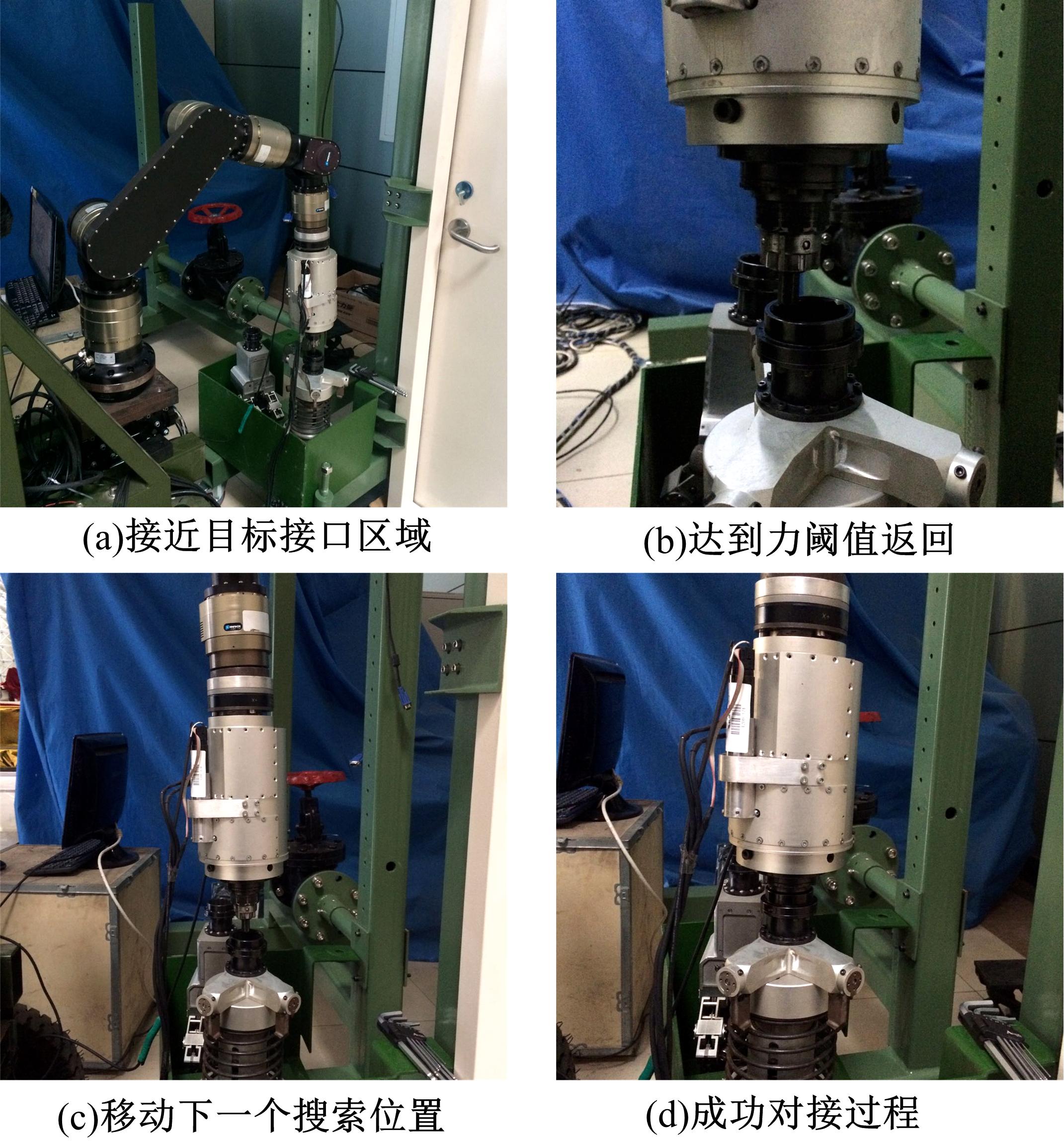
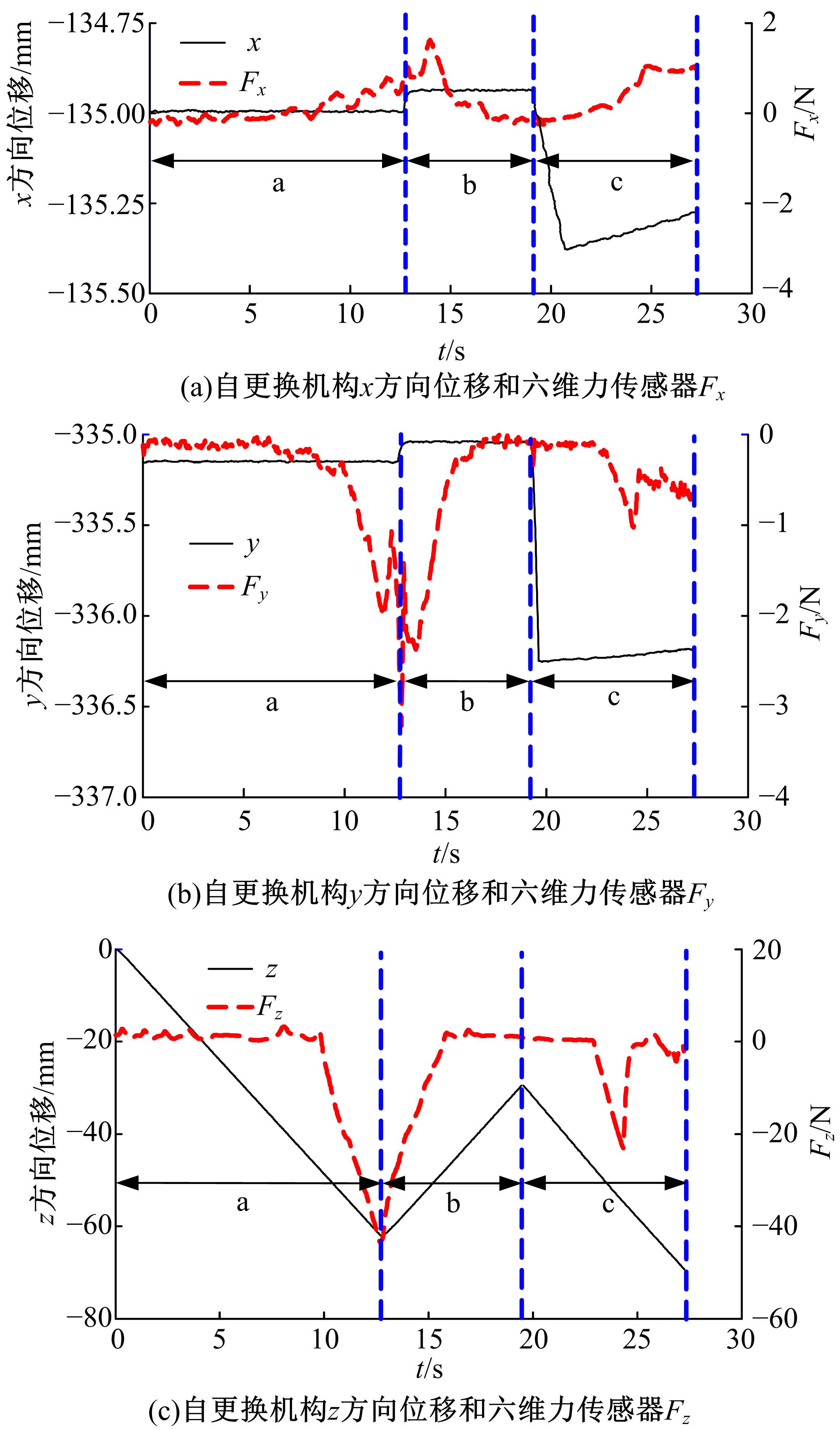
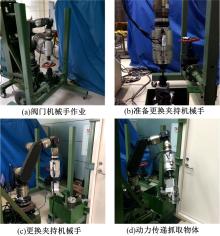
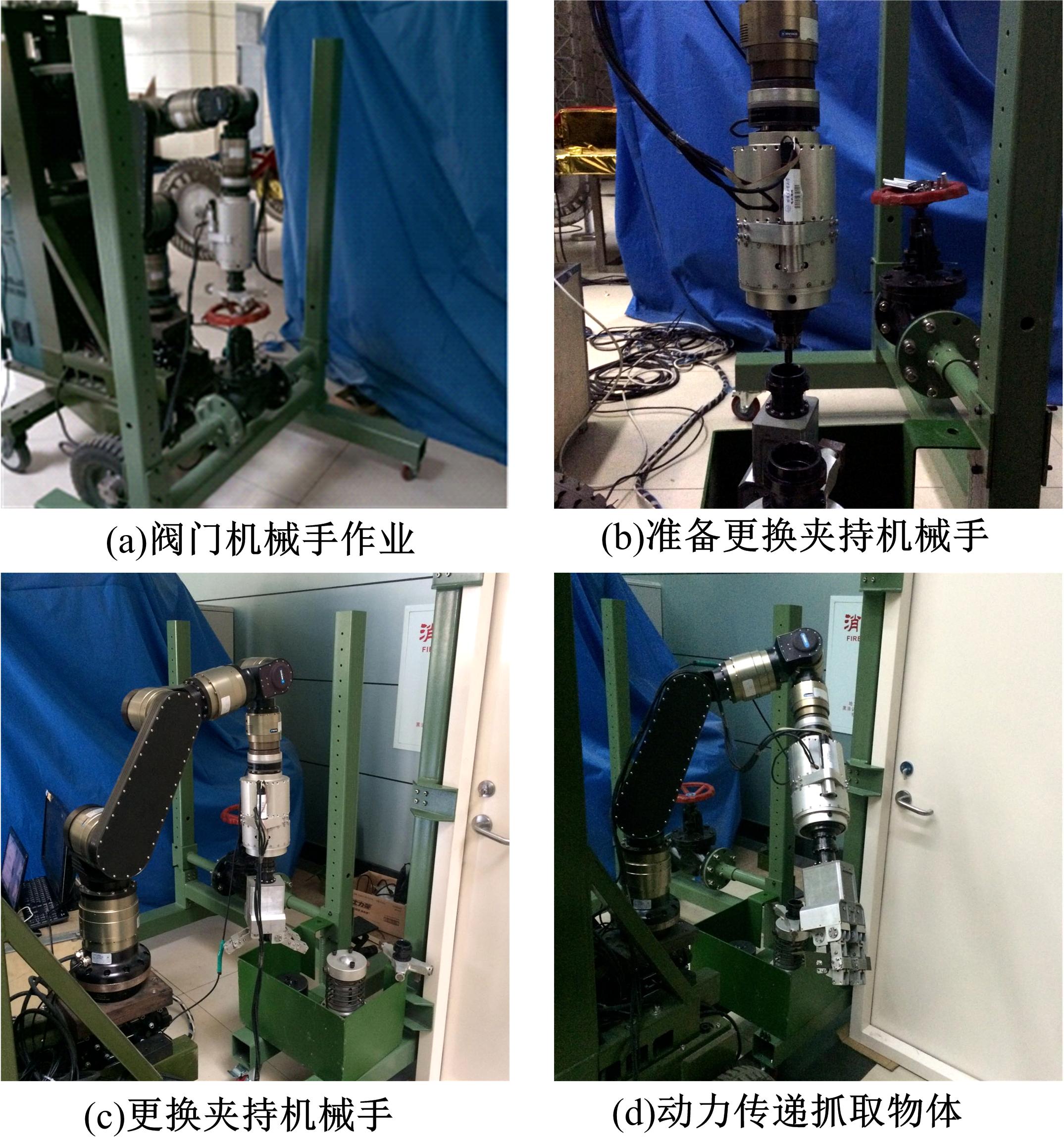
为解决核电站机器人作业功能单一性的问题,研制了一种机器人末端执行器自更换机构。该机构采用同心三虎克铰并联的多力矩输出接口形式,为末端执行器及相关作业提供动力输入。在分析末端执行器自更换端与工具架之间双虎克铰被动柔顺对接特性以及容差条件的基础上,提出了一种基于接触力阈值的末端执行器自更换机构自动对接控制策略;完成了末端执行器自更换机构样机设计,利用SCHUNK 6自由度机械臂移动平台进行多种末端执行器的自动更换试验,验证了控制策略的有效性和机构的容差特性。试验结果表明:该机构能够完成较大容差柔顺对接并可以实现末端执行器动力传递功能。
中图分类号:
- TH165




|
| [1] | 马苗苗,潘军军,刘向杰. 含电动汽车的微电网模型预测负荷频率控制[J]. 吉林大学学报(工学版), 2019, 49(5): 1644-1652. |
| [2] | 温海营,任翔,徐卫良,丛明,秦文龙,胡书海. 咀嚼机器人颞下颌关节仿生设计及试验测试[J]. 吉林大学学报(工学版), 2019, 49(3): 943-952. |
| [3] | 于树友,谭雷,王伍洋,陈虹. 基于三步法的汽车主动四轮转向控制[J]. 吉林大学学报(工学版), 2019, 49(3): 934-942. |
| [4] | 顾万里,王萍,胡云峰,蔡硕,陈虹. 具有H∞性能的轮式移动机器人非线性控制器设计[J]. 吉林大学学报(工学版), 2018, 48(6): 1811-1819. |
| [5] | 李战东,陶建国,罗阳,孙浩,丁亮,邓宗全. 核电水池推力附着机器人系统设计[J]. 吉林大学学报(工学版), 2018, 48(6): 1820-1826. |
| [6] | 赵爽,沈继红,张刘,赵晗,陈柯帆. 微细电火花加工表面粗糙度快速高斯评定[J]. 吉林大学学报(工学版), 2018, 48(6): 1838-1843. |
| [7] | 王德军, 魏薇郦, 鲍亚新. 考虑侧风干扰的电子稳定控制系统执行器故障诊断[J]. 吉林大学学报(工学版), 2018, 48(5): 1548-1555. |
| [8] | 闫冬梅, 钟辉, 任丽莉, 王若琳, 李红梅. 具有区间时变时滞的线性系统稳定性分析[J]. 吉林大学学报(工学版), 2018, 48(5): 1556-1562. |
| [9] | 董惠娟, 于震, 樊继壮. 基于激光测振仪的非轴对称超声驻波声场的识别[J]. 吉林大学学报(工学版), 2018, 48(4): 1191-1198. |
| [10] | 张茹斌, 占礼葵, 彭伟, 孙少明, 刘骏富, 任雷. 心肺功能评估训练系统的恒功率控制[J]. 吉林大学学报(工学版), 2018, 48(4): 1184-1190. |
| [11] | 田彦涛, 张宇, 王晓玉, 陈华. 基于平方根无迹卡尔曼滤波算法的电动汽车质心侧偏角估计[J]. 吉林大学学报(工学版), 2018, 48(3): 845-852. |
| [12] | 张士涛, 张葆, 李贤涛, 王正玺, 田大鹏. 基于零相差轨迹控制方法提升快速反射镜性能[J]. 吉林大学学报(工学版), 2018, 48(3): 853-858. |
| [13] | 王林, 王洪光, 宋屹峰, 潘新安, 张宏志. 输电线路悬垂绝缘子清扫机器人行为规划[J]. 吉林大学学报(工学版), 2018, 48(2): 518-525. |
| [14] | 胡云峰, 王长勇, 于树友, 孙鹏远, 陈虹. 缸内直喷汽油机共轨系统结构参数优化[J]. 吉林大学学报(工学版), 2018, 48(1): 236-244. |
| [15] | 朱枫, 张葆, 李贤涛, 王正玺, 张士涛. 基于强跟踪卡尔曼滤波的陀螺信号处理[J]. 吉林大学学报(工学版), 2017, 47(6): 1868-1875. |
|