吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (12): 3508-3517.doi: 10.13229/j.cnki.jdxbgxb.20220080
• 通信与控制工程 • 上一篇
基于快速非奇异终端滑模的三维天车负载摆动控制
王守瑞1( ),靳伍银1(),芮执元1,张霞2
),靳伍银1(),芮执元1,张霞2
- 1.兰州理工大学 机电工程学院,兰州 730050
2.陇东学院 电气工程学院,甘肃 庆阳 745000
Payload swing control for 3D overhead crane based on fast non⁃singular terminal sliding mode
Shou-rui WANG1(),Wu-yin JIN1(),Zhi-yuan RUI1,Xia ZHANG2
- 1.School of Mechanical and Electrical Engineering,Lanzhou University of Technology,Lanzhou 730050,China
2.College of Electrical Engineering,Longdong University,Qingyang 745000,China
摘要:
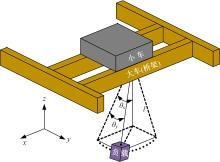
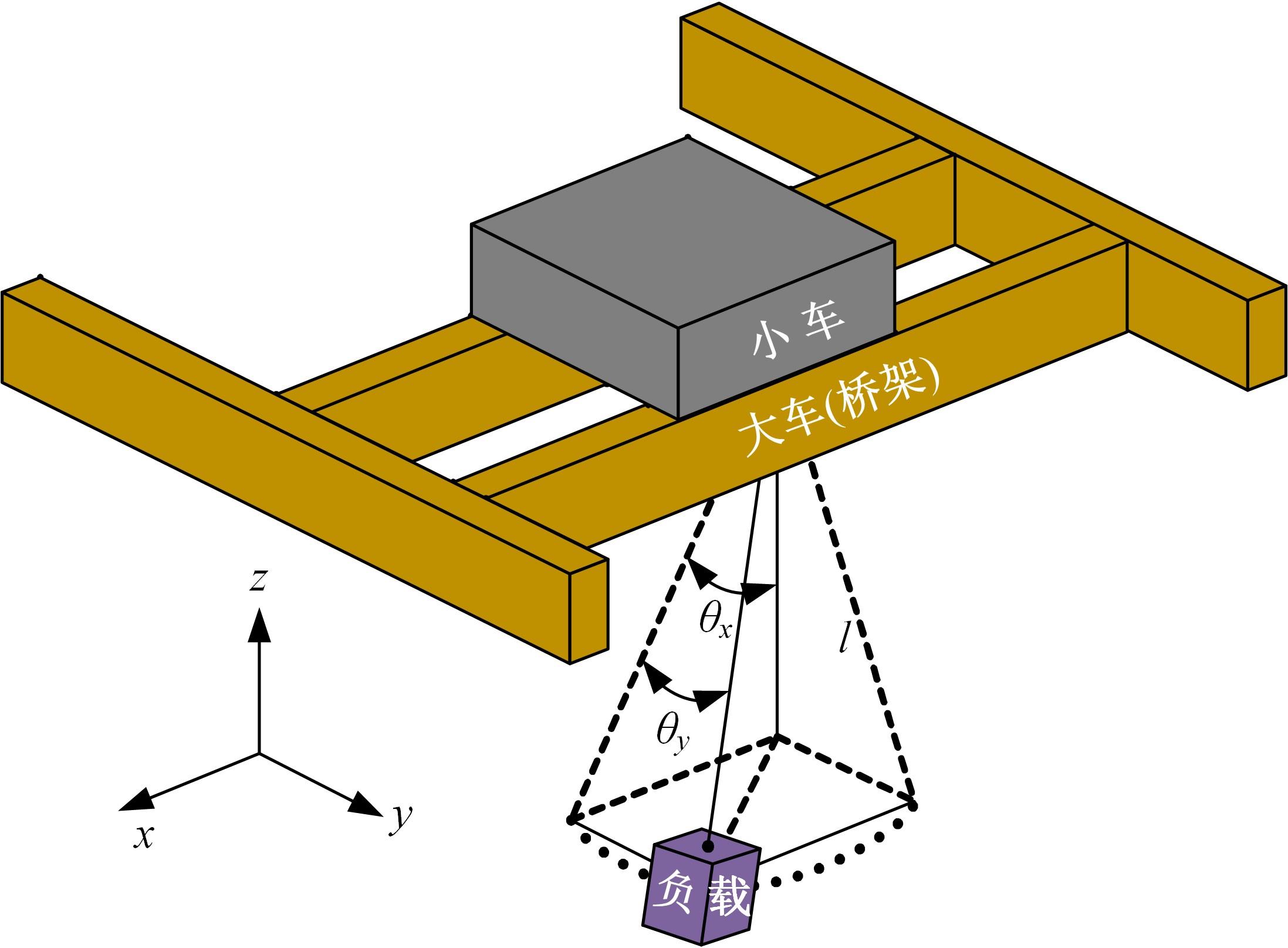
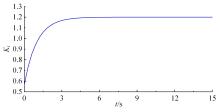
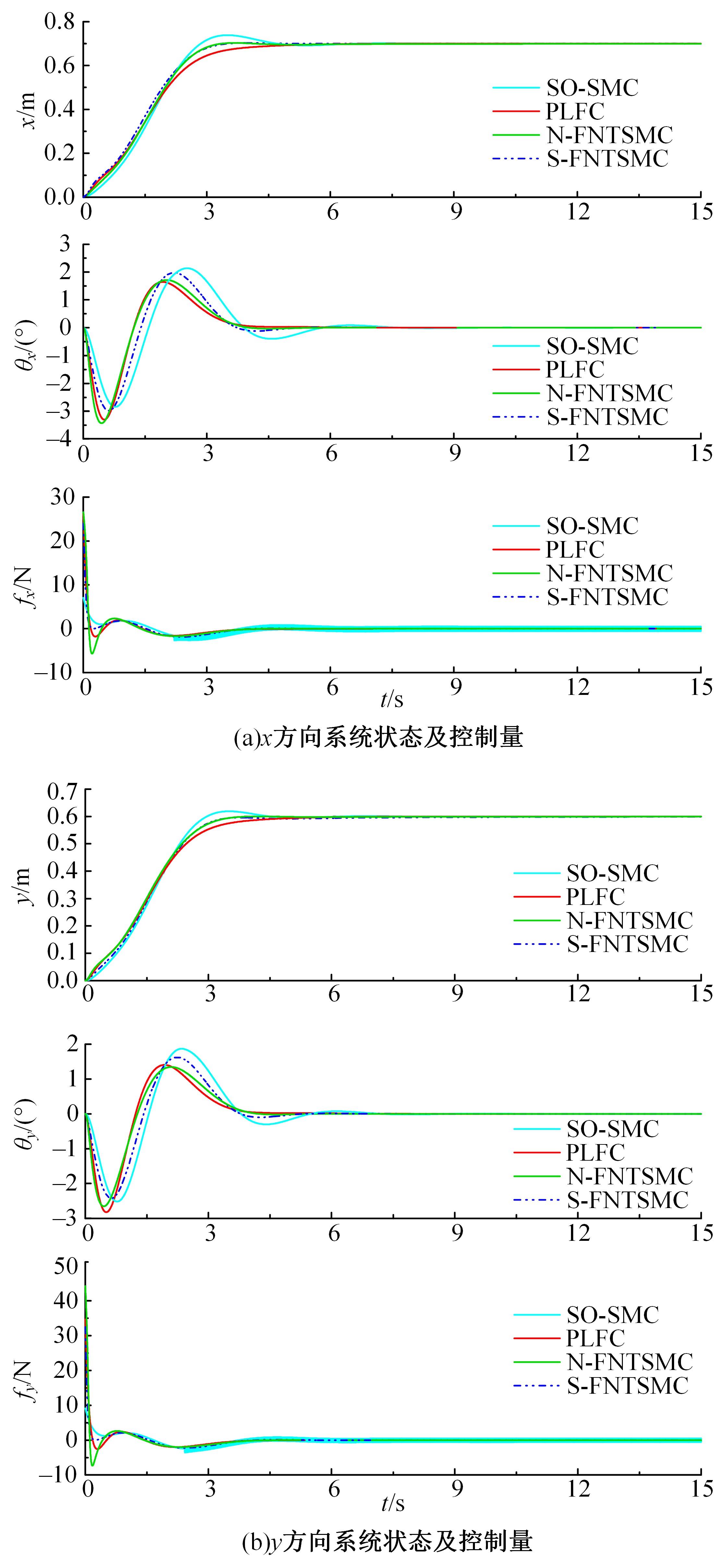
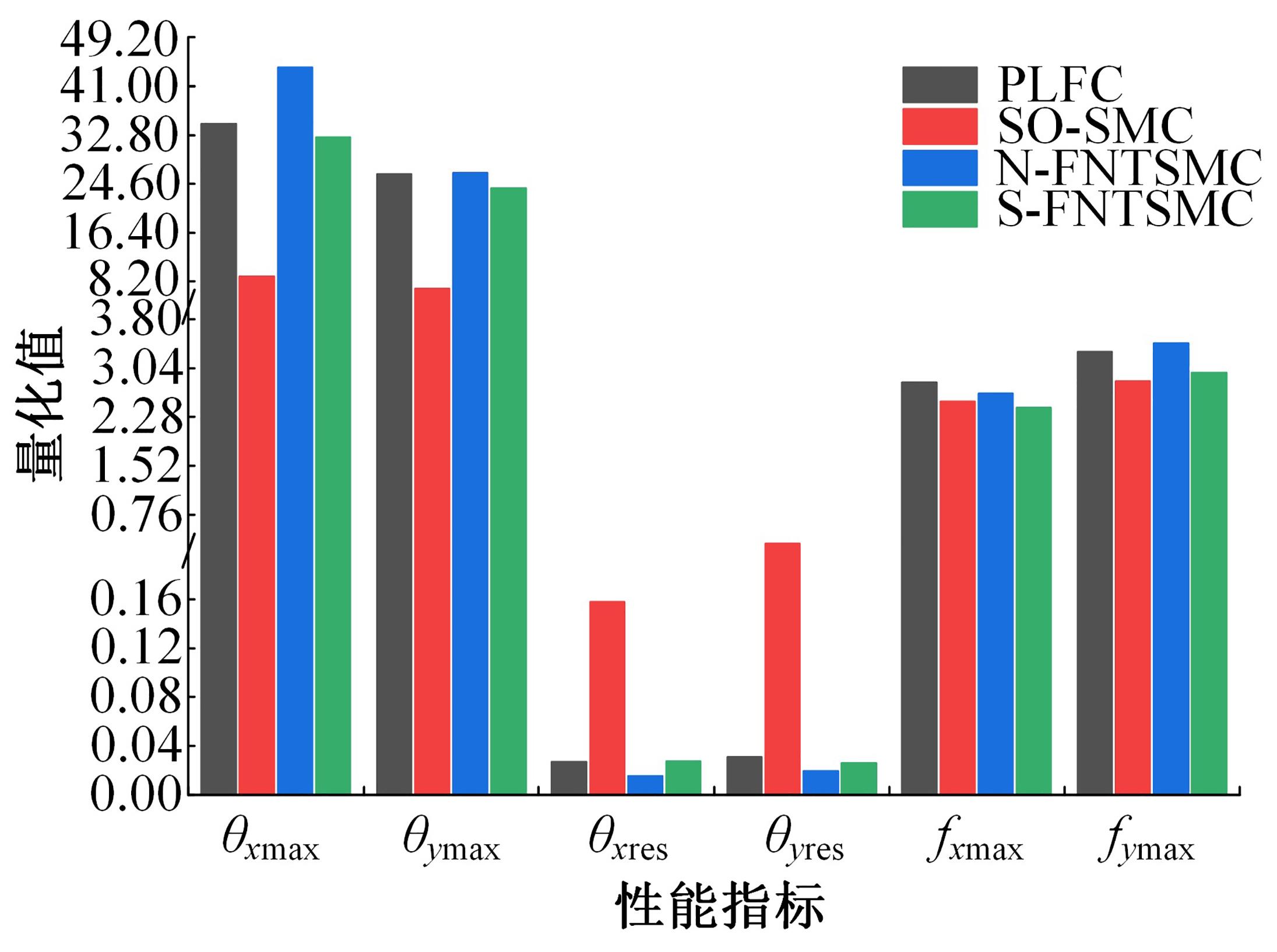
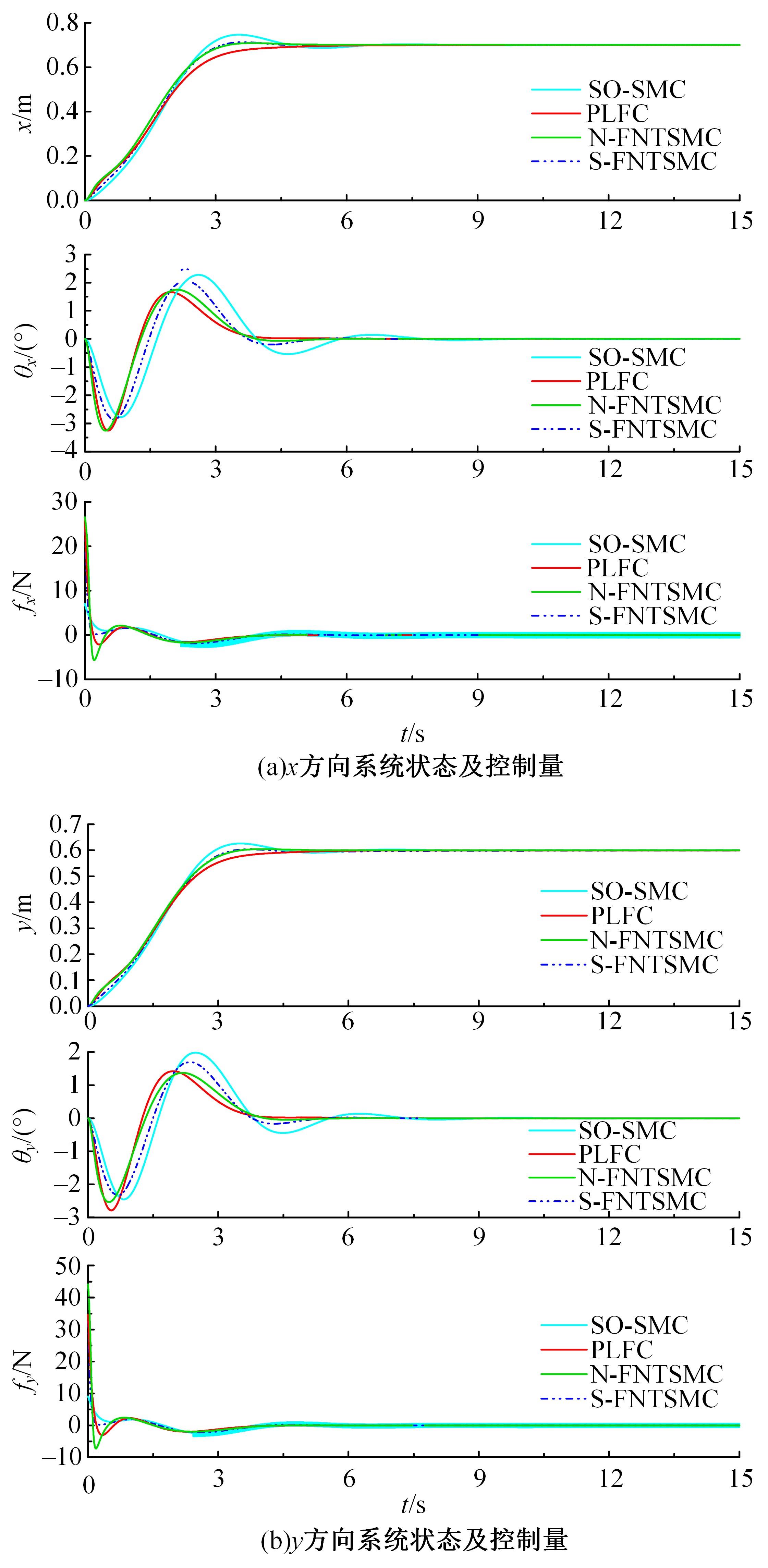
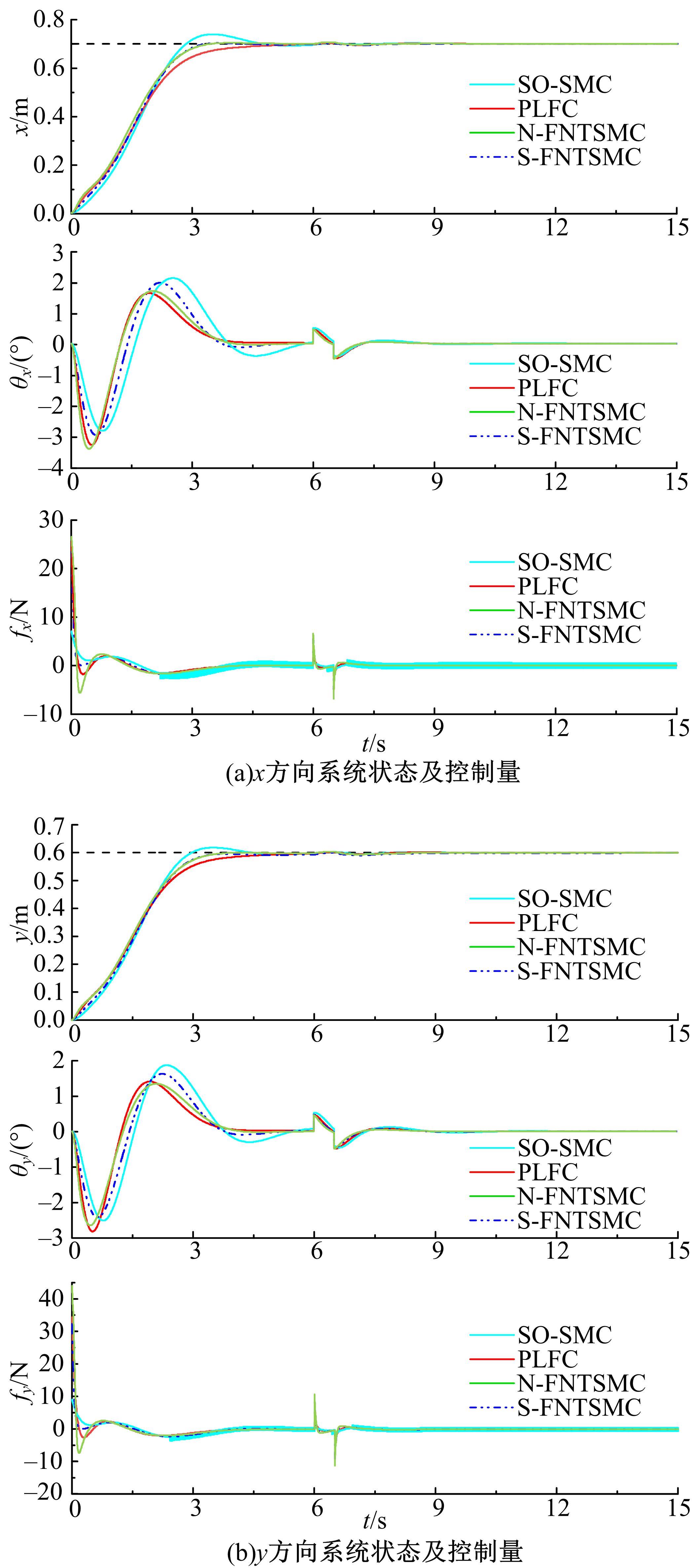
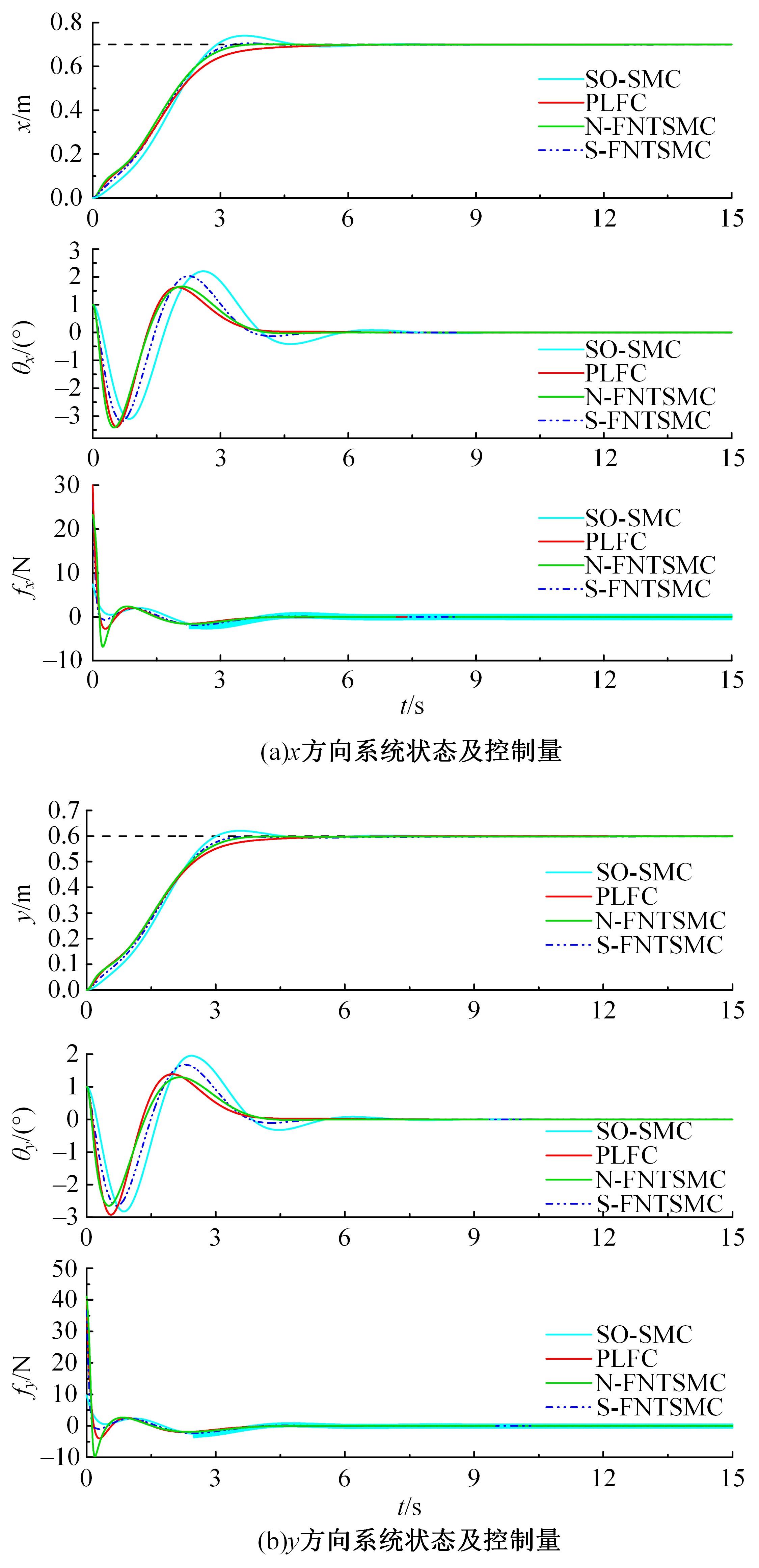
对于三维天车防摆控制系统易受参数摄动、外部未知干扰等不确定因素影响的问题,提出了一种基于参数自适应的快速非奇异终端滑模控制方法。针对三维天车系统动力学模型,考虑负载质量和缆绳长度时变、外部干扰等不确定性因素,基于滑模控制理论,构造了含有位移偏差和负载摆动角度的复合滑模面,设计了滑模参数自适应律,实现了控制器增益根据系统误差自动整定,保证了位移误差和摆动角度在有限时间内收敛到零。与现有控制方法仿真对比,本文控制方法可以使天车在3.5 s内到达目标位置且不发生超调,有效抑制了负载摆动,最大摆动角度不超过3°,快速消除了负载的残余摆动。结果表明,该方法改善了天车系统的动态响应性能,增强了控制系统的鲁棒性和抗干扰性。
中图分类号:
- TP273




| 1 | Zhang S, Zhu H, He X, et al. Passivity-based coupling control for underactuated three-dimensional overhead cranes[J]. ISA Transactions, 2022, 126: 352-360. |
| 2 | 何博, 方勇纯, 卢彪. 针对输入时滞的桥式起重机鲁棒控制[J]. 自动化学报, 2019, 45(6): 1065-1073. |
| He Bo, Fang Yong-chun, Lu Biao. Robust control for an overhead crane with input delay[J]. Acta Automatica Sinica, 2019, 45(6): 1065-1073. | |
| 3 | 孙宁, 方勇纯, 王鹏程, 等. 欠驱动三维桥式吊车系统自适应跟踪控制器设计[J]. 自动化学报, 2010, 36(9): 1287-1294. |
| Sun Ning, Fang Yong-chun, Wang Peng-cheng, et al. Adaptive trajectory tracking control of underactuated 3-dimensional overhead crane systems[J]. Acta Automatica Sinica, 2010, 36(9): 1287-1294. | |
| 4 | 孙宁, 方勇纯, 陈鹤. 欠驱动桥式吊车消摆跟踪控制[J]. 控制理论与应用, 2015, 32(3): 326-333. |
| Sun Ning, Fang Yong-chun, Chen He. Antiswing tracking control for underactuated bridge cranes[J]. Control Theory & Applications, 2015, 32(3): 326-333. | |
| 5 | Ramli L, Mohamed Z, Abdullahi A M, et al. Control strategies for crane systems: a comprehensive review[J]. Mechanical Systems and Signal Processing, 2017, 95: 1-23. |
| 6 | Jaafar H I, Mohamed Z, Ahmad M A, et al. Control of an underactuated double-pendulum overhead crane using improved model reference command shaping: design, simulation and experiment[J]. Mechanical Systems and Signal Processing, 2021, 151(1): No. 107358. |
| 7 | Xia X, Wu Z. Optimal motion planning for overhead cranes[J]. IET Control Theory & Applications, 2014, 8(17): 1833-1842. |
| 8 | Aguiar C, Leite D, Pereira D, et al. Nonlinear modeling and robust LMI fuzzy control of overhead crane systems[J]. Journal of the Franklin Institute, 2021, 358(2): 1376-1402. |
| 9 | Lu B, Fang Y, Sun N. Adaptive output-feedback control for dual overhead crane system with enhanced anti-swing performance[J]. IEEE Transactions on Control Systems Technology, 2020, 28(6): 2235-2248. |
| 10 | Zhang S, He X, Chen Q. Energy coupled-dissipation control for 3-dimensional overhead cranes[J]. Nonlinear Dynamics, 2020, 99(3): 2097-2107. |
| 11 | 刘金琨. 滑模变结构控制Matlab仿真: 基本理论与设计方法[M]. 北京: 清华大学出版社, 2015. |
| 12 | Gu X, Xu W. Moving sliding mode controller for overhead cranes suffering from matched and unmatched disturbances[J]. Transactions of the Institute of Measurement and Control, 2022, 44(1): 60-75. |
| 13 | Tuan L A, Kim J J, Lee S G, et al. Second-order sliding mode control of a 3D overhead crane with uncertain system parameters[J]. International Journal of Precision Engineering and Manufacturing, 2014, 15(5): 811-819. |
| 14 | Le V-A, Le H-X, Nguyen L, et al. An efficient adaptive hierarchical sliding mode control strategy using neural networks for 3D overhead cranes[J]. International Journal of Automation and Computing, 2019, 16(5): 614-627. |
| 15 | Anh L V, Hai L X, Thuan V D, et al. Designing an adaptive controller for 3D overhead cranes using hierarchical sliding mode and neural network[C]∥International Conference on System Science and Engineering, Taipei, China, 2018: No.18202192. |
| 16 | Park M S, Chwa D, Eom M. Adaptive sliding-mode antisway control of uncertain overhead cranes with high-speed hoisting motion[J]. IEEE Transactions on Fuzzy Systems, 2014, 22(5): 1262-1271. |
| 17 | Tuan L A, Lee S G, Nho L C, et al. Model reference adaptive sliding mode control for three dimensional overhead cranes[J]. International Journal of Precision Engineering & Manufacturing, 2013, 14(8): 1329-1338. |
| 18 | Tsai C C, Wu H L, Chuang K H. Intelligent sliding-mode motion control using fuzzy wavelet networks for automatic 3D overhead cranes[C]∥SICE Annual Conference, Akita, Japan, 2012: No. 3055903. |
| 19 | Zhang M, Zhang Y, Chen H, et al. Model-independent PD-SMC method with payload swing suppression for 3D overhead crane systems[J]. Mechanical Systems and Signal Processing, 2019, 129: 381-393. |
| 20 | Chwa D. Sliding mode control-based robust finite-time anti-sway tracking control of 3-D overhead cranes[J]. IEEE Transactions on Industrial Electronics, 2017, 64(8): 6775-6784. |
| 21 | Ouyang H, Hu J, Zhang G, et al. Sliding-mode-based trajectory tracking and load sway suppression control for double-pendulum overhead cranes[J]. IEEE Access, 2019, 7: 4371-4379. |
| 22 | Zhang M, Zhang Y, Cheng X. An enhanced coupling PD with sliding mode control method for underactuated double-pendulum overhead crane systems[J]. International Journal of Control, Automation and Systems, 2019, 17(6): 1579-1588. |
| 23 | Wang T, Tan N, Zhang X, et al. A time-varying sliding mode control method for distributed-mass double pendulum bridge crane with variable parameters[J]. IEEE Access, 2021, 9: 75981-75992. |
| 24 | Almutairi N B, Zribi M. Sliding mode control of a three-dimensional overhead crane[J]. Journal of Vibration & Control, 2009, 15(11): 1679-1730. |
| 25 | 刘洋, 井元伟, 刘晓平, 等. 非线性系统有限时间控制研究综述[J]. 控制理论与应用, 2020, 37(1): 1-12. |
| Liu Yang, Jing Yuan-wei, Liu Xiao-ping, et al. Survey on finite-time control for nonlinear systems[J]. Control Theory & Applications, 2020, 37(1): 1-12. | |
| 26 | 王伟, 赵健廷, 胡宽荣, 等. 基于快速非奇异终端滑模的机械臂轨迹跟踪方法[J].吉林大学学报: 工学版, 2020, 50(2): 464-471. |
| Wang Wei, Zhao Jian-ting, Hu Kuan-rong, et al. Trajectory tracking of robotic manipulators based on fast nonsingular terminal sliding mode[J]. Journal of Jilin University (Engineering and Technology Edition), 2020, 50(2): 464-471. | |
| 27 | Zhou M, Sun N, Chen H, et al. A novel sliding mode control method for underactuated overhead cranes[C]∥Chinese Automation Congress, Jinan, China, 2017: No. 17469598. |
| 28 | Wu X, He X. Partial feedback linearization control for 3-D underactuated overhead crane systems[J]. ISA Transactions, 2016, 65: 361-370. |
| [1] | 孙耀,胡云峰,周杰敏,程欢,曲婷,赵靖华,陈虹. 基于分层控制器的SCR系统滚动时域优化控制方法[J]. 吉林大学学报(工学版), 2023, 53(1): 61-71. |
| [2] | 高金武,贾志桓,王向阳,邢浩. 基于PSO-LSTM的质子交换膜燃料电池退化趋势预测[J]. 吉林大学学报(工学版), 2022, 52(9): 2192-2202. |
| [3] | 高金武,王义琳,刘华洋,王艺达. 基于滑模观测器的质子交换膜燃料电池阴极进气系统解耦控制[J]. 吉林大学学报(工学版), 2022, 52(9): 2156-2167. |
| [4] | 李昂,杨泓渊,雷小萌,宋凯文,千承辉. 基于等效连杆模型的六足机器人行进姿态闭环控制[J]. 吉林大学学报(工学版), 2022, 52(7): 1696-1708. |
| [5] | 朱航,于瀚博,梁佳辉,李宏泽. 基于电场模型的无人机搜寻改进算法及仿真分析[J]. 吉林大学学报(工学版), 2022, 52(12): 3029-3038. |
| [6] | 陈菲,杨峥,张志成,罗巍. 面向无标签数据的旋转机械故障诊断方法[J]. 吉林大学学报(工学版), 2022, 52(11): 2514-2522. |
| [7] | 鲜斌,张诗婧,韩晓薇,蔡佳明,王岭. 基于强化学习的无人机吊挂负载系统轨迹规划[J]. 吉林大学学报(工学版), 2021, 51(6): 2259-2267. |
| [8] | 许芳,张君明,胡云峰,曲婷,曲逸,刘奇芳. 智能车辆路径跟踪横纵向耦合实时预测控制器[J]. 吉林大学学报(工学版), 2021, 51(6): 2287-2294. |
| [9] | 韩光信,赵聚乐,胡云峰. 控制输入受限的板球系统滚动线性二次型调节器控制[J]. 吉林大学学报(工学版), 2021, 51(6): 1982-1989. |
| [10] | 董延华,刘靓葳,赵靖华,李亮,解方喜. 基于BPNN在线学习预测模型的扭矩实时跟踪控制[J]. 吉林大学学报(工学版), 2021, 51(4): 1405-1413. |
| [11] | 于树友,常欢,孟凌宇,郭洋,曲婷. 基于扰动观测器的轮式移动机器人滚动时域路径跟踪控制[J]. 吉林大学学报(工学版), 2021, 51(3): 1097-1105. |
| [12] | 吴爱国,韩俊庆,董娜. 基于极局部模型的机械臂自适应滑模控制[J]. 吉林大学学报(工学版), 2020, 50(5): 1905-1912. |
| [13] | 王伟,赵健廷,胡宽荣,郭永仓. 基于快速非奇异终端滑模的机械臂轨迹跟踪方法[J]. 吉林大学学报(工学版), 2020, 50(2): 464-471. |
| [14] | 刘富,安毅,董博,李元春. 基于ADP的可重构机械臂能耗保代价分散最优控制[J]. 吉林大学学报(工学版), 2020, 50(1): 342-350. |
| [15] | 曲兴田,王学旭,孙慧超,张昆,闫龙威,王宏一. 熔融沉积成型技术3D打印机加热系统的模糊自适应PID控制[J]. 吉林大学学报(工学版), 2020, 50(1): 77-83. |
|
||