吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (11): 3745-3750.doi: 10.13229/j.cnki.jdxbgxb.20240112
• 通信与控制工程 • 上一篇
基于改进蜻蜓算法的快反镜积分终端滑模控制
冯建鑫( ),李昊阳,巩建雄,龚柏春
),李昊阳,巩建雄,龚柏春
- 南京航空航天大学 航天学院,南京 210016
Integral terminal sliding mode controller of fast steering mirror based on improved dragonfly algorithm
Jian-xin FENG(),Hao-yang LI,Jian-xiong GONG,Bai-chun GONG
- Academy of Astronautics,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China
摘要:
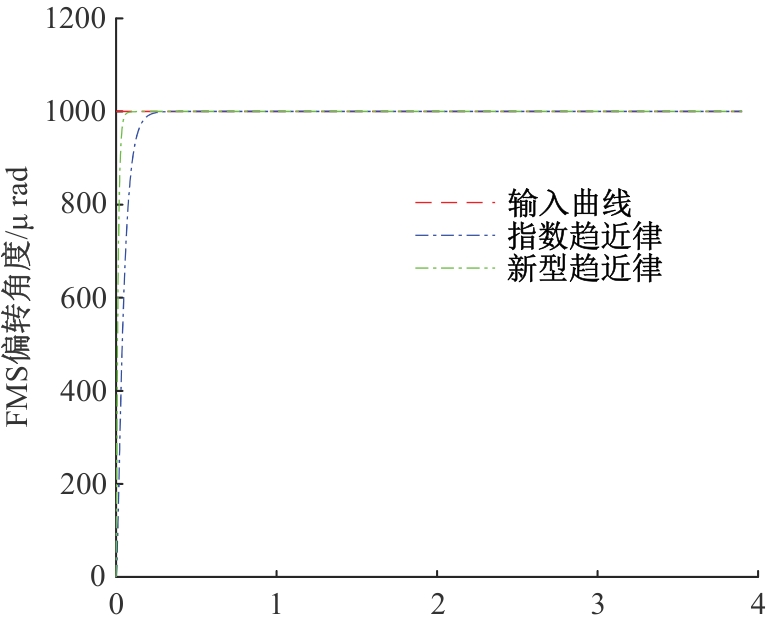
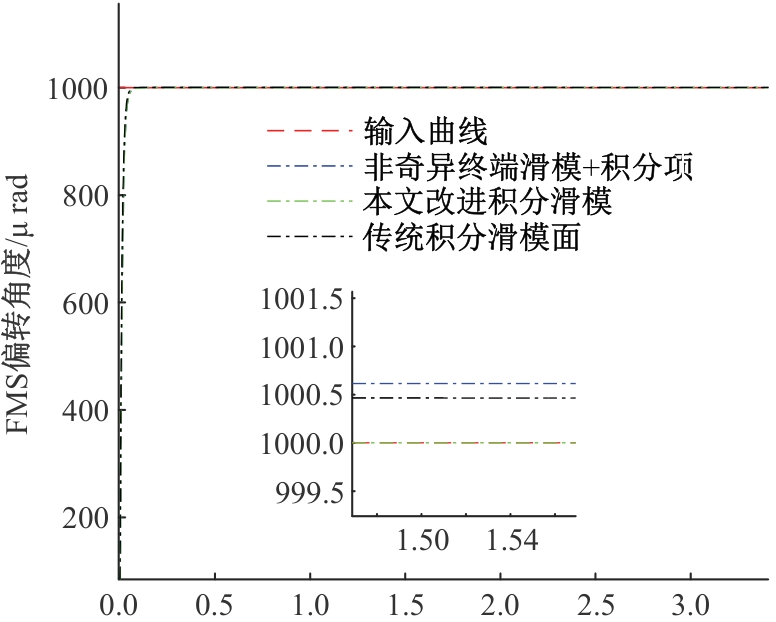
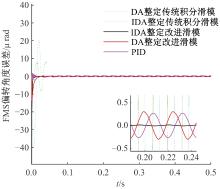
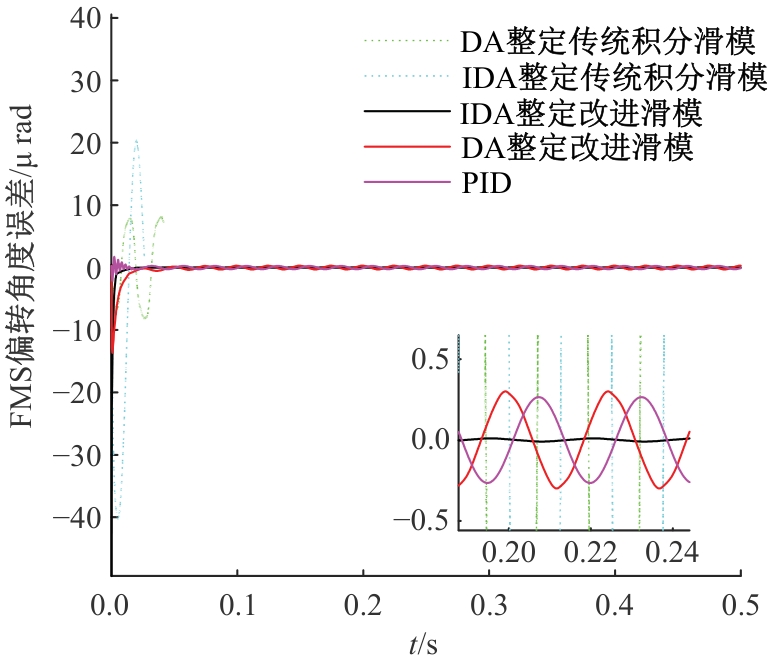
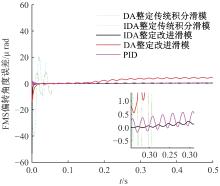
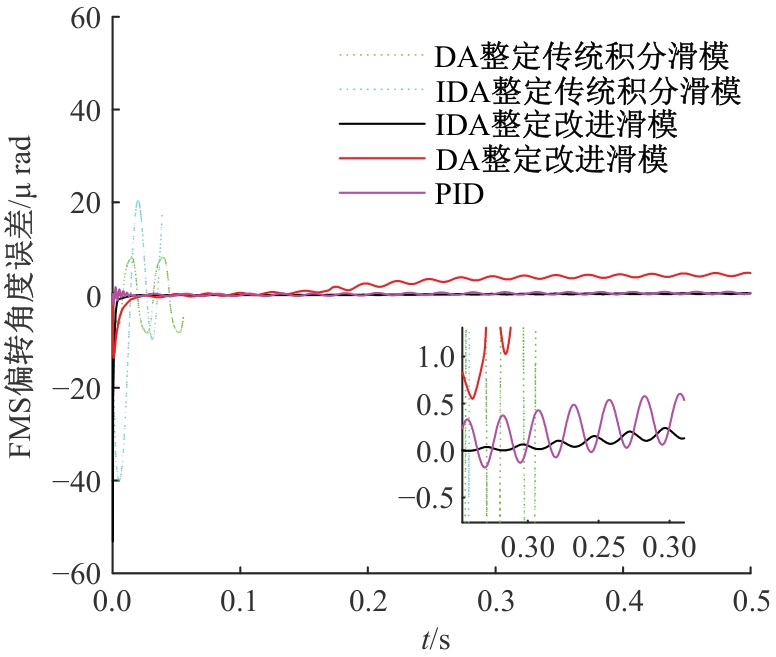
为提高空间激光通信跟瞄系统中快反镜(FSM)的跟踪精度和抗干扰能力,设计了新型积分快速非奇异终端滑模控制器。通过设计积分快速非奇异终端滑模面,提高了滑动模态阶段性能,同时设计新型的指数型趋近率,提高趋近阶段动态品质。利用蜻蜓算法(DA)对控制器参数进行优化,以提高系统的动态性能并保证较强的鲁棒性。针对传统蜻蜓算法的不足,对蜻蜓算法的惯性因子、队列权重、聚集权重的调整方式进行改进,并引入逐维评价机制及改进正余弦算法的位置更新机制,进一步提高蜻蜓算法的寻优能力。最后,通过仿真验证了本文方法在快反镜控制过程中的有效性。
中图分类号:
- TP 273
| [1] | 张士涛, 张葆, 李贤涛,等. 基于零相差轨迹控制方法提升快速反射镜性能[J]. 吉林大学学报: 工学版, 2018, 48(3): 853-858. |
| Zhang Shi-tao, Zhang Bao, Li Xian-tao, et al. Enhancing performance of FSM based on zero phase error tracking control[J]. Journal of Jilin University (Engineering and Technology Edition), 2018, 48(3): 853-858. | |
| [2] | 崔宁, 陈兴林, 曹开锐, 等. 空间光通信精跟踪系统的模糊自抗扰控制[J]. 光学精密工程, 2015, 23(5): 1394-1400. |
| Cui Ning, Chen Xing-lin, Cao Kai-rui, et al. Fuzzy active disturbance rejection control of fine tracking system for free space optical communication[J]. Optics and Precision Engineering, 2015, 23(5): 1394-1400. | |
| [3] | Alvi A B, Asif M, Siddiqui A F, et al. Fast steering mirror control using embedded self-learning fuzzy controller for free space optical communication[J]. Wireless Personal Communications, 2014, 76(3): 643-656. |
| [4] | 王瑞, 苏秀琴, 乔永明, 等. 基于双前馈+双神经网络自适应快速反射镜的解耦控制[J]. 红外与激光工程, 2021, 50(11): 231-237. |
| Wang Rui, Su Xiu-qin, Qiao Yong-ming, et al. Decoupling control of fast steering mirror based on dual feedforward + dual neural network adaptive[J]. Infrared and Laser Engineering, 2021, 50(11): 231-237. | |
| [5] | 田福庆, 李克玉, 王珏, 等. 压电驱动快速反射镜的自适应反演滑模控制[J]. 强激光与粒子束, 2014, 26(1): 65-69. |
| Tian Fu-qing, Li Ke-yu, Wang Jue, et al. Adaptive backstepping sliding mode control of fast steering mirror driven by piezoelectric actuator[J]. High Power Laser and Particle Beams, 2014, 26(1): 65-69. | |
| [6] | 吴爱国, 韩俊庆, 董娜. 基于极局部模型的机械臂自适应滑模控制[J]. 吉林大学学报: 工学版, 2020, 50(5): 1905-1912. |
| Wu Ai-guo, Han Jun-qing, Dong Na. Adaptive sliding mode control based on ultra⁃local model for robotic manipulator[J]. Journal of Jilin University (Engineering and Technology Edition), 2020, 50(5): 1905-1912. | |
| [7] | 冯勇, 鲍晟, 余星火. 非奇异终端滑模控制系统的设计方法[J]. 控制与决策, 2002(2): 194-198. |
| Feng Yong, Bao Sheng, Yu Xing-huo. Design method of non-singular terminal sliding mode control systems[J]. Control and Decision, 2002(2): 194-198. | |
| [8] | Xin L J, Wang Q L, Li Y. A new fast nonsingular terminal sliding mode control for a class of second-order uncertain systems[J]. Mathematical Problems in Engineering, 2016, 12: 1743861. |
| [9] | 冯建鑫, 王雅雷, 王强, 等. 改进蜻蜓算法的快速反射镜自抗扰控制[J]. 光学精密工程, 2021, 29(6): 1301-1310. |
| Feng Jian-xin, Wang Ya-lei, Wang Qiang, et al. Active disturbance rejection controller of fast steering mirror based on improved dragonfly algorithm[J]. Optics and Precision Engineering, 2021, 29(6): 1301-1310. | |
| [10] | 马芳武, 韩丽, 吴量, 等. 基于遗传与粒子群算法的隔振平台减振性能优化[J].吉林大学学报: 工学版, 2020, 50(5): 1608-1616. |
| Ma Fang-wu, Han Li, Wu Liang, et al. Damping optimization of heavy⁃loaded anti⁃vibration platform based on genetic algorithm and particle swarm algorithm[J]. Journal of Jilin University (Engineering and Technology Edition), 2020, 50(5): 1608-1616. | |
| [11] | 王蕾, 丁正生. 融合正弦余弦算法和精英算子的花授粉算法[J]. 计算机工程与应用, 2020, 56(6): 159-164. |
| Wang Lei, Ding Zheng-sheng. Improved flower pollination algorithm combining sine cosine algorithm and elite operator[J]. Computer Engineering and Applications, 2020, 56(6): 159-164. |
| [1] | 李健,刘欢,李艳秋,王海瑞,关路,廖昌义. 基于THGS算法优化ResNet-18模型的图像识别[J]. 吉林大学学报(工学版), 2025, 55(5): 1629-1637. |
| [2] | 顿国强,吴星澎,纪欣鑫,张福利,纪文义,朱礼贵. 玉米条带摆管式撒肥装置设计及试验[J]. 吉林大学学报(工学版), 2024, 54(9): 2697-2707. |
| [3] | 余萍,赵康,曹洁. 基于优化A-BiLSTM的滚动轴承故障诊断[J]. 吉林大学学报(工学版), 2024, 54(8): 2156-2166. |
| [4] | 李房云,夏容,张怡欣. 考虑电池荷电状态的混合动力汽车复合电源协同控制[J]. 吉林大学学报(工学版), 2024, 54(4): 1114-1119. |
| [5] | 刘玉梅,胡婷,庄娇娇,盛佳香,周殿买. 基于主成分分析赋权的变轨距列车悬挂参数优化[J]. 吉林大学学报(工学版), 2024, 54(11): 3158-3167. |
| [6] | 于贵申,陈鑫,武子涛,陈轶雄,张冠宸. AA6061⁃T6铝薄板无针搅拌摩擦点焊接头结构及性能分析[J]. 吉林大学学报(工学版), 2023, 53(5): 1338-1344. |
| [7] | 顿国强,刘文辉,吴星澎,毛宁,纪文义,马洪岩. 螺旋挤压式精量排肥器的仿真优化及试验[J]. 吉林大学学报(工学版), 2023, 53(10): 3026-3037. |
| [8] | 陈兵,马凯璇,刘洋,任江,张晨曦,赵韬硕. 双电机驱动履带车辆直驶稳定性分层控制策略[J]. 吉林大学学报(工学版), 2023, 53(10): 2752-2760. |
| [9] | 史瑞杰,戴飞,赵武云,刘小龙,瞿江飞,张锋伟. 丘陵山地胡麻联合收割机作业参数优化与试验[J]. 吉林大学学报(工学版), 2022, 52(11): 2746-2755. |
| [10] | 耿端阳,牟孝栋,张国栋,王宗源,朱俊科,徐海刚. 小麦联合收获机清选机理分析与优化试验[J]. 吉林大学学报(工学版), 2022, 52(1): 219-230. |
| [11] | 张斌,程国赞,洪昊岑,赵春晓,白大鹏,杨华勇. 基于SVR的轴向柱塞泵配流盘三角槽结构优化[J]. 吉林大学学报(工学版), 2021, 51(4): 1213-1221. |
| [12] | 杜常清,曹锡良,何彪,任卫群. 基于混合粒子群算法的双离合变速器参数优化设计[J]. 吉林大学学报(工学版), 2020, 50(5): 1556-1564. |
| [13] | 何仁,涂琨. 基于温度补偿气隙宽度的电磁制动器[J]. 吉林大学学报(工学版), 2019, 49(6): 1777-1785. |
| [14] | 谷远利, 张源, 芮小平, 陆文琦, 李萌, 王硕. 基于免疫算法优化LSSVM的短时交通流预测[J]. 吉林大学学报(工学版), 2019, 49(6): 1852-1857. |
| [15] | 张士涛, 张葆, 李贤涛, 王正玺, 田大鹏. 基于零相差轨迹控制方法提升快速反射镜性能[J]. 吉林大学学报(工学版), 2018, 48(3): 853-858. |
|
||