吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (3): 653-662.doi: 10.13229/j.cnki.jdxbgxb20221273
• 通信与控制工程 • 上一篇
基于Transformer的轮式里程计误差预测模型
何科( ),丁海涛,赖宣淇,许男,郭孔辉
),丁海涛,赖宣淇,许男,郭孔辉
- 吉林大学 汽车工程学院,长春 130022
Wheel odometry error prediction model based on transformer
Ke HE(),Hai-tao DING,Xuan-qi LAI,Nan XU,Kong-hui GUO
- College of Automotive Engineering,Jilin University,Changchun 130022,China
摘要:
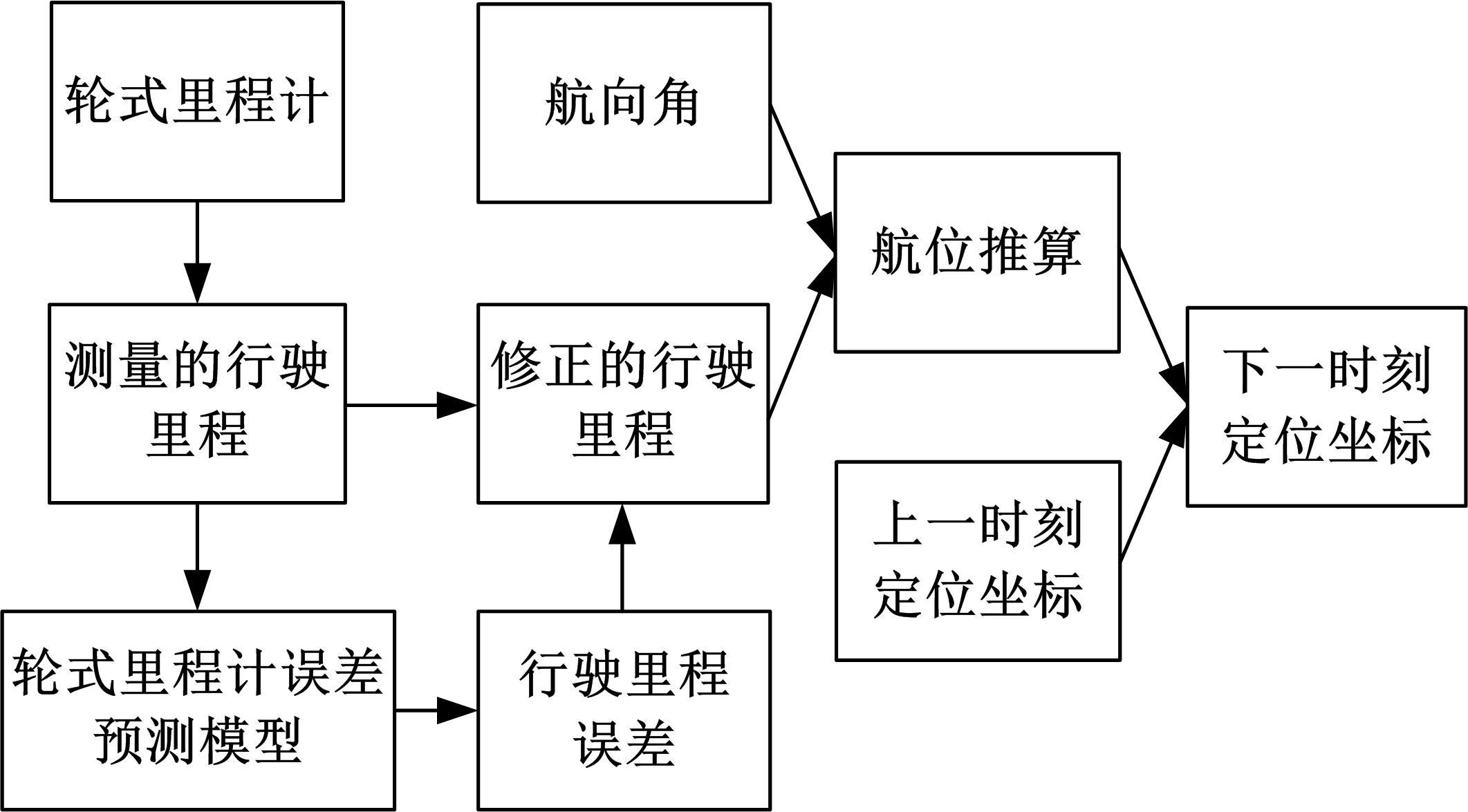
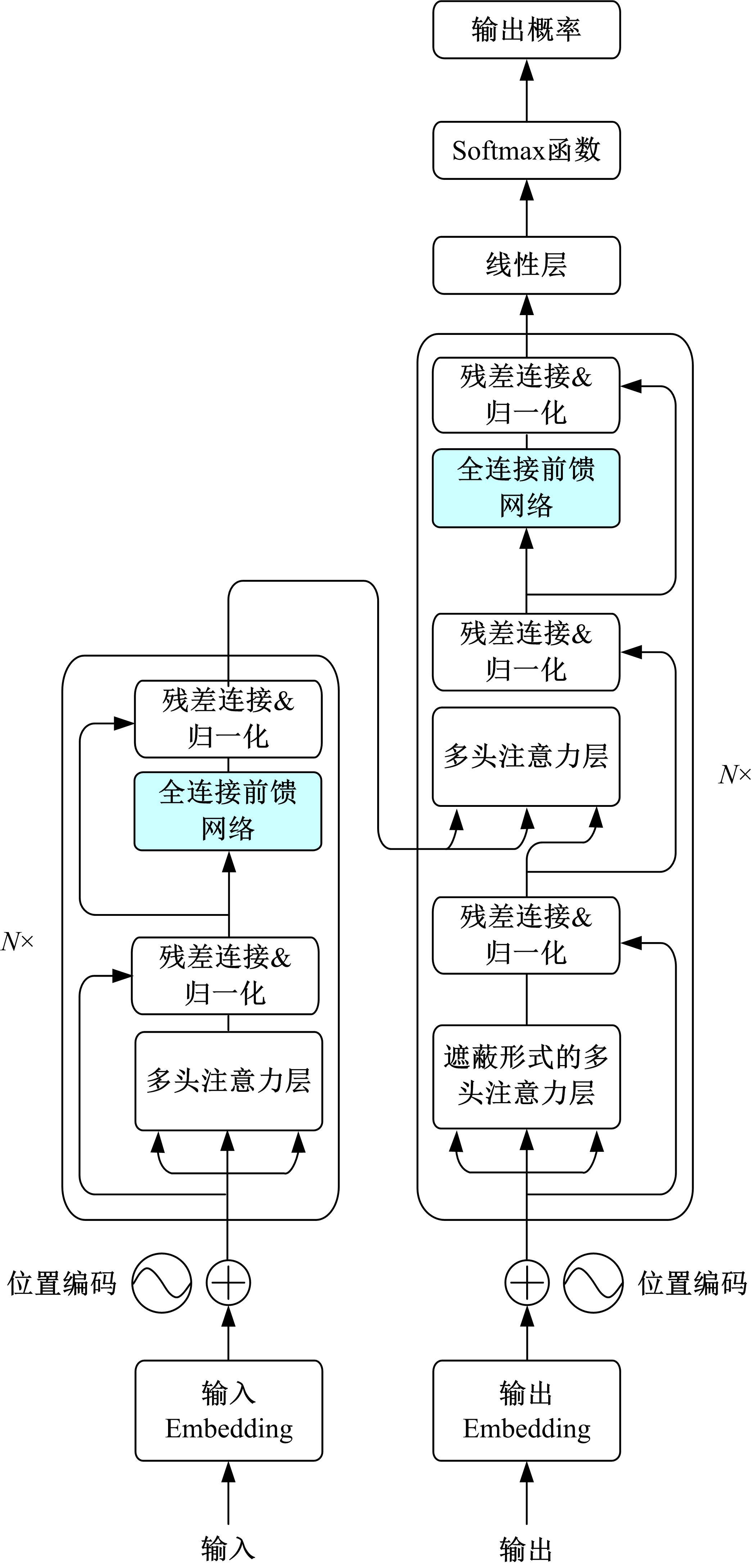
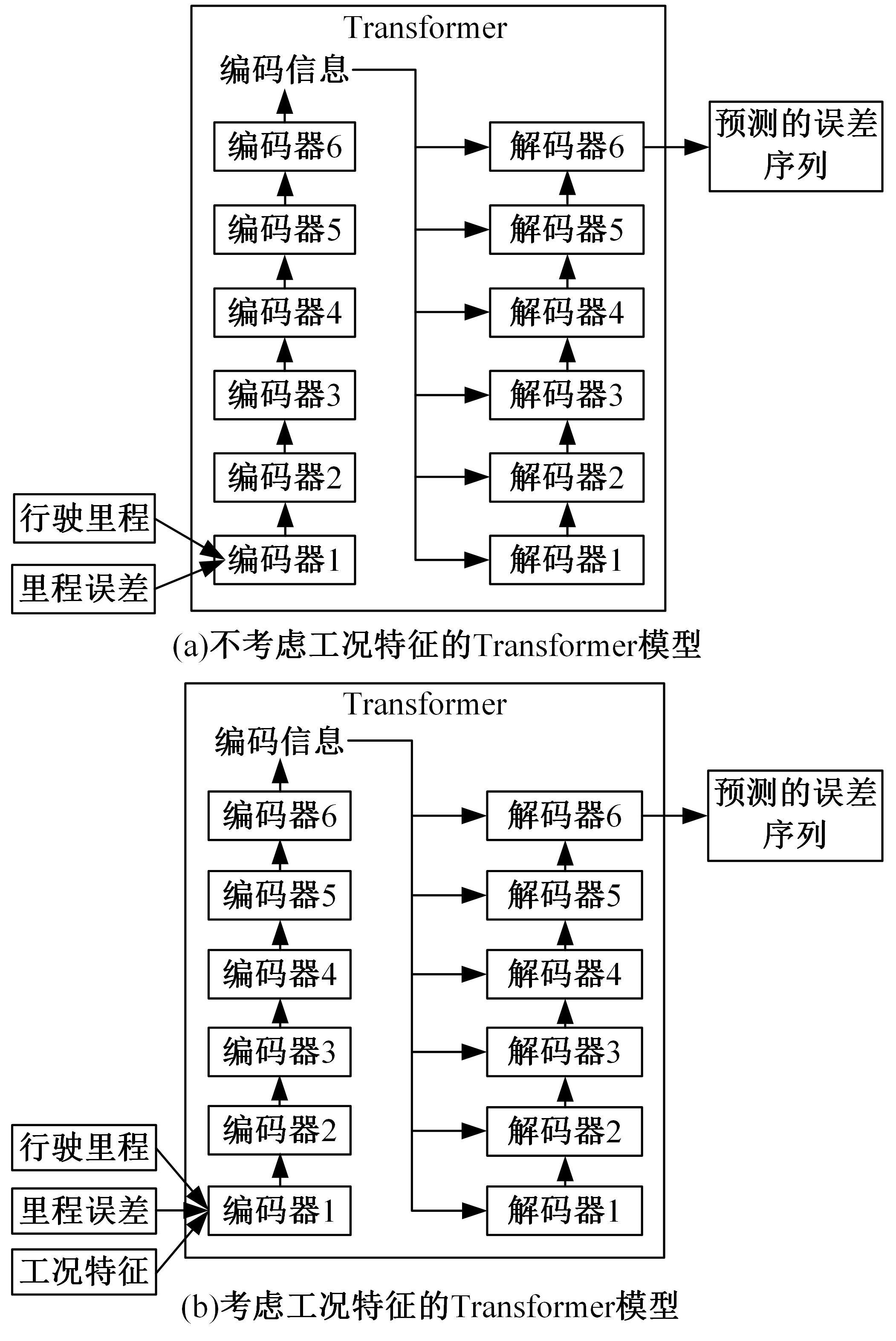
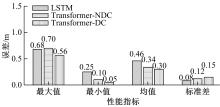
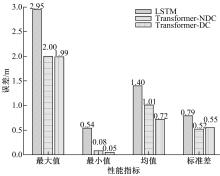
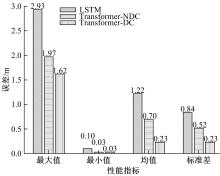
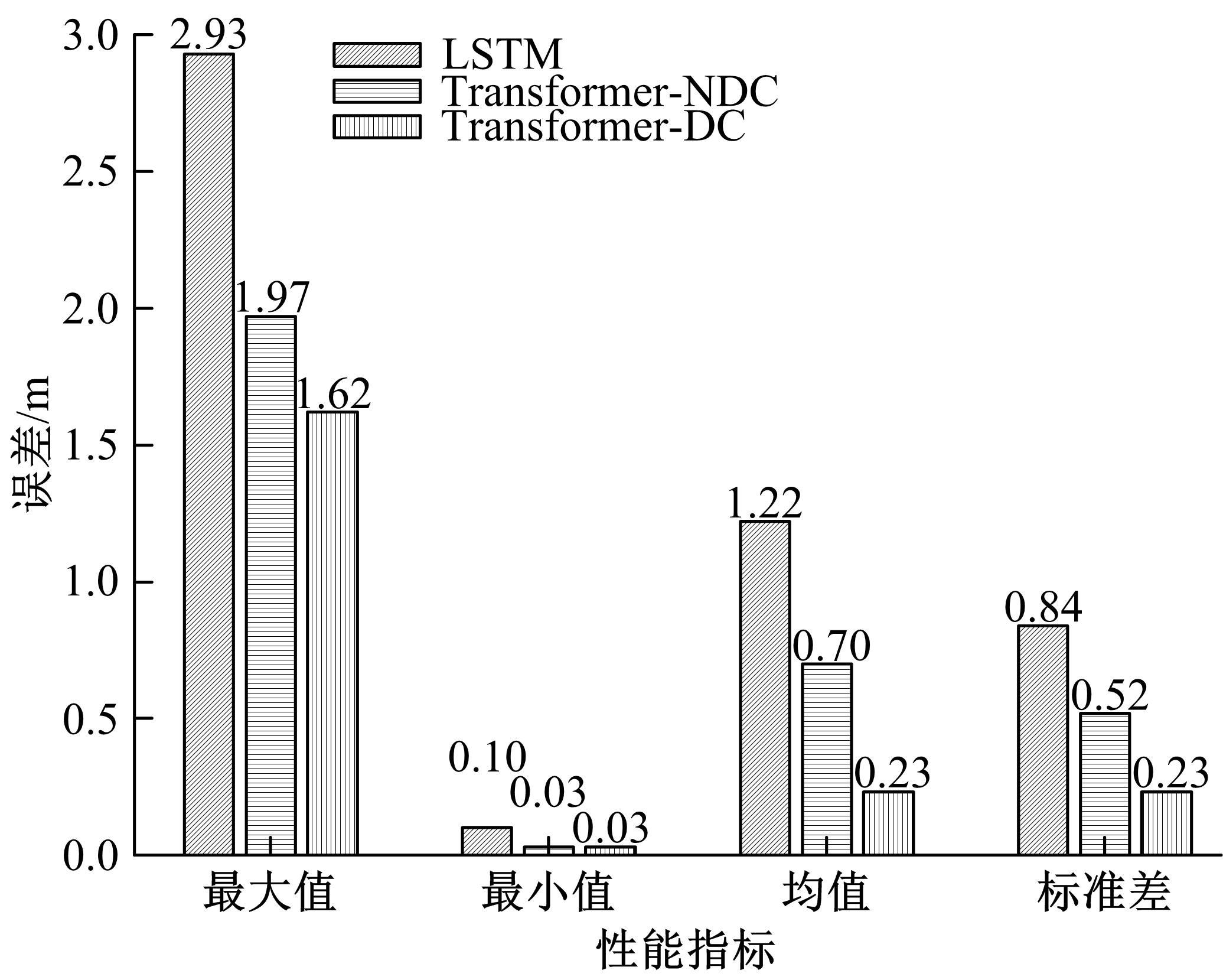
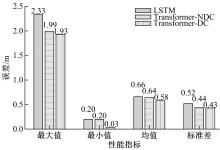
针对利用轮式里程计定位时会产生难以预测和多变误差的问题,提出了使用Transformer神经网络建立轮式里程计误差预测模型,以准确预测变化的里程误差,提高了轮式里程计的定位精度。首先,建立不考虑工况特征和考虑工况特征两种模型。然后,在多种工况下与LSTM模型进行对比实验,结果表明:在常规和挑战性工况下,本文模型相比LSTM模型具有更高的精度、稳定性和可靠性。同时,相比于不考虑工况特征,考虑工况特征能有效提高模型的整体性能。
中图分类号:
- U469.79





| 1 | 高振海,孙天骏,何磊. 汽车纵向自动驾驶的因果推理型决策[J]. 吉林大学学报: 工学版, 2019, 49(5): 1392-1404. |
| Gao Zhen-hai, Sun Tian-jun, He Lei. Causal reasoning decision⁃making for vehicle longitudinal automatic driving[J]. Journal of Jilin University (Engineering and Technology Edition), 2019, 49(5): 1392-1404. | |
| 2 | Jo K, Kim J, Kim D, et al. Development of autonomous car—part I: distributed system architecture and development process[J]. IEEE Transactions on Industrial Electronics, 2014, 61(12): 7131-7140. |
| 3 | Lu W, Rodríguez F S A, Seignez E, et al. Lane marking-based vehicle localization using low-cost GPS and open source map[J]. Unmanned Systems, 2015, 3(4): 239-251. |
| 4 | Xu L H, Hu S G, Luo Q. A new lane departure warning algorithm considering the driver's behavior characteristics[J]. Mathematical Problems in Engineering, 2015(1): No.412126. |
| 5 | Levinson J, Montemerlo M, Thrun S. Map-based precision vehicle localization in urban environments[C]∥Robotics: Science and Systems, Atlanta, Georgia, USA, 2007: No.16. |
| 6 | 秦晓辉, 王哲文, 庞涛, 等. 基于车辆模型紧耦合的封闭园区车辆定位方法[J]. 汽车工程,2021,43(9): 1328-1335. |
| Qin Xiao-hui, Wang Zhe-wen, Pang Tao, et al. Vehicle positioning method based on tight coupling of vehicle model in enclosed environments[J]. Automotive Engineering, 2021, 43(9): 1328-1335. | |
| 7 | Kubo N, Suzuki T. Performance improvement of RTK-GNSS with IMU and vehicle speed sensors in an urban environment[J]. IEICE Transactions on Fundamentals of Electronics, Communications and Computer Sciences, 2016, 99(1): 217-224. |
| 8 | 何永明, 陈世升, 冯佳, 等. 基于高精地图的超高速公路虚拟轨道系统[J/OL]. [2022-02-15]. |
| 9 | Funk N, Alatur N, Deuber R, et al. Autonomous electric race car design[J/OL]. [2022-08-26]. |
| 10 | Schwesinger U, Bürki M, Timpner J, et al. Automated valet parking and charging for e-mobility[C]∥2016 IEEE Intelligent Vehicles Symposium (IV), Gothenburg, Sweden, 2016: 157-164. |
| 11 | Schanz A, Spieker A, Kuhnert K D. Autonomous parking in subterranean garages-a look at the position estimation[C]∥IEEE IV2003 Intelligent Vehicles Symposium, OH, USA, 2003: 253-258. |
| 12 | Malleswaran M, Vaidehi V, Manjula S, et al. Performance comparison of HONNs and FFNNs in GPS and INS integration for vehicular navigation[C]∥2011 International Conference on Recent Trends in Information Technology (ICRTIT), Chennai, India, 2011: 223-228. |
| 13 | Malleswaran M, Vaidehi V, Saravanaselvan A, et al. Performance analysis of various artificial intelligent neural networks for GPS/INS integration[J]. Applied Artificial Intelligence, 2013, 27(5): 367-407. |
| 14 | Dai H, Bian H, Wang R, et al. An INS/GNSS integrated navigation in GNSS denied environment using recurrent neural network[J]. Defence Technology, 2020, 16(2): 334-340. |
| 15 | Fang W, Jiang J, Lu S, et al. A LSTM algorithm estimating pseudo measurements for aiding INS during GNSS signal outages[J]. Remote Sensing, 2020, 12(2): No.256. |
| 16 | Onyekpe U, Palade V, Kanarachos S, et al. Learning uncertainties in wheel odometry for vehicular localisation in GNSS deprived environments[C]∥2020 19th IEEE International Conference on Machine Learning and Applications (ICMLA), Miami, FL, USA, 2020: 741-746. |
| 17 | Vaswani A, Shazeer N, Parmar N, et al. Attention is all you need[J/OL]. [2022-09-28]. |
| 18 | Onyekpe U, Kanarachos S, Palade V, et al. Vehicular localisation at high and low estimation rates during gnss outages: a deep learning approach[J]. Deep Learning Applications, 2021,2: 237-256. |
| 19 | Onyekpe U, Palade V, Kanarachos S, et al. IO-VNBD: inertial and odometry benchmark dataset for ground vehicle positioning[J]. Data in Brief, 2021, 35: No.106885. |
| 20 | Onyekpe U, Palade V, Kanarachos S. Learning to localise automated vehicles in challenging environments using Inertial Navigation Systems (INS)[J]. Applied Sciences, 2021, 11(3): No.1270. |
| [1] | 王登峰,陈宏利,那景新,陈鑫. 单双搭接接头经高温老化后的失效对比[J]. 吉林大学学报(工学版), 2023, 53(2): 346-354. |
| [2] | 张佩,王志伟,杜常清,颜伏伍,卢炽华. 车用质子交换膜燃料电池空气系统过氧比控制方法[J]. 吉林大学学报(工学版), 2022, 52(9): 1996-2003. |
| [3] | 王克勇,鲍大同,周苏. 基于数据驱动的车用燃料电池故障在线自适应诊断算法[J]. 吉林大学学报(工学版), 2022, 52(9): 2107-2118. |
| [4] | 曹起铭,闵海涛,孙维毅,于远彬,蒋俊宇. 质子交换膜燃料电池低温启动水热平衡特性[J]. 吉林大学学报(工学版), 2022, 52(9): 2139-2146. |
| [5] | 隗海林,王泽钊,张家祯,刘洋. 基于Avl-Cruise的燃料电池汽车传动比及能量管理策略[J]. 吉林大学学报(工学版), 2022, 52(9): 2119-2129. |
| [6] | 刘岩,丁天威,王宇鹏,都京,赵洪辉. 基于自适应控制的燃料电池发动机热管理策略[J]. 吉林大学学报(工学版), 2022, 52(9): 2168-2174. |
| [7] | 高金武,贾志桓,王向阳,邢浩. 基于PSO-LSTM的质子交换膜燃料电池退化趋势预测[J]. 吉林大学学报(工学版), 2022, 52(9): 2192-2202. |
| [8] | 李丞,景浩,胡广地,刘晓东,冯彪. 适用于质子交换膜燃料电池系统的高阶滑模观测器[J]. 吉林大学学报(工学版), 2022, 52(9): 2203-2212. |
| [9] | 池训逞,侯中军,魏伟,夏增刚,庄琳琳,郭荣. 基于模型的质子交换膜燃料电池系统阳极气体浓度估计技术综述[J]. 吉林大学学报(工学版), 2022, 52(9): 1957-1970. |
| [10] | 裴尧旺,陈凤祥,胡哲,翟双,裴冯来,张卫东,焦杰然. 基于自适应LQR控制的质子交换膜燃料电池热管理系统温度控制[J]. 吉林大学学报(工学版), 2022, 52(9): 2014-2024. |
| [11] | 胡广地,景浩,李丞,冯彪,刘晓东. 基于高阶燃料电池模型的多目标滑模控制[J]. 吉林大学学报(工学版), 2022, 52(9): 2182-2191. |
| [12] | 陈凤祥,伍琪,李元松,莫天德,李煜,黄李平,苏建红,张卫东. 2.5吨燃料电池混合动力叉车匹配、仿真及优化[J]. 吉林大学学报(工学版), 2022, 52(9): 2044-2054. |
| [13] | 武小花,余忠伟,朱张玲,高新梅. 燃料电池公交车模糊能量管理策略[J]. 吉林大学学报(工学版), 2022, 52(9): 2077-2084. |
| [14] | 高青,王浩东,刘玉彬,金石,陈宇. 动力电池应急冷却喷射模式实验分析[J]. 吉林大学学报(工学版), 2022, 52(8): 1733-1740. |
| [15] | 王奎洋,何仁. 基于支持向量机的制动意图识别方法[J]. 吉林大学学报(工学版), 2022, 52(8): 1770-1776. |
|
||