吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (4): 1225-1231.doi: 10.13229/j.cnki.jdxbgxb.20240399
热因素对线控穿刺机器人精度稳定性的影响
王冠斌1,2( ),孙椰望1,2(),高鹏凯1,2,杨鲁伟1,2
),孙椰望1,2(),高鹏凯1,2,杨鲁伟1,2
- 1.中国科学院 理化技术研究所,北京 100190
2.中国科学院大学,北京 101408
Influence of thermal factors on precision stability of wire-controlled puncture robot
Guan-bin WANG1,2(),Ye-wang SUN1,2(),Peng-kai GAO1,2,Lu-wei YANG1,2
- 1.Technical Institute of Physics and Chemistry,Chinese Academy of Sciences,Beijing 100190,China
2.University of Chinese Academy of Sciences,Beijing 101408,China
摘要:
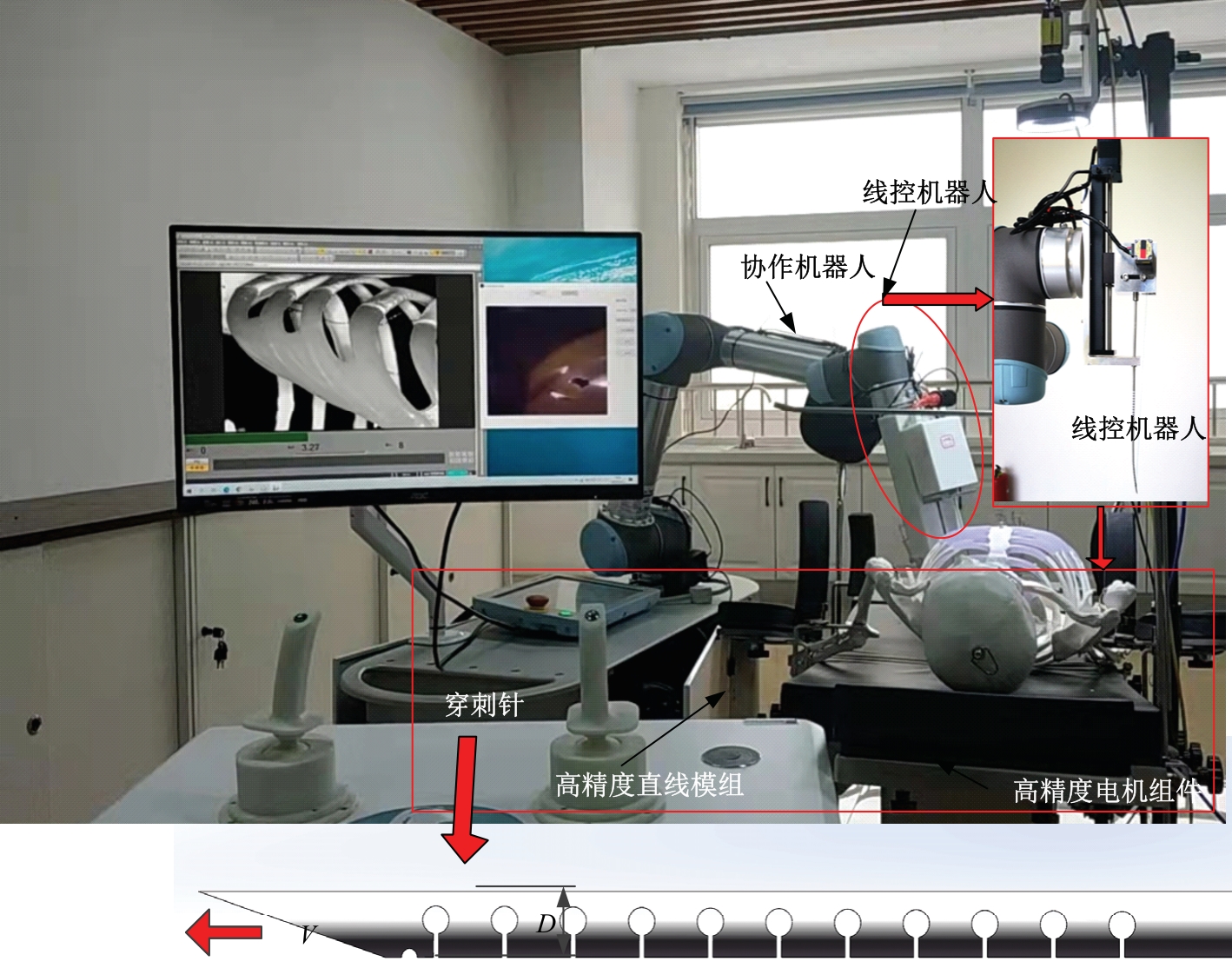
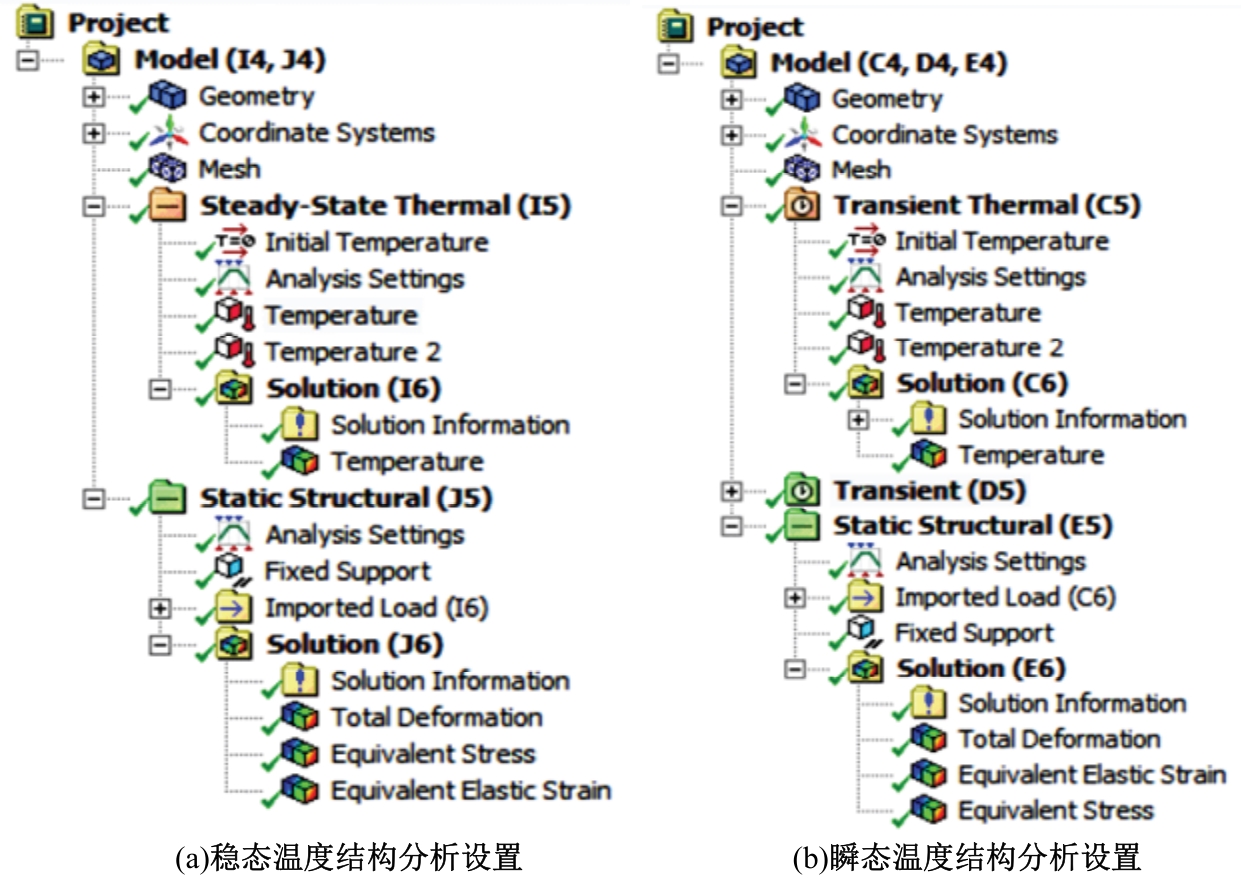
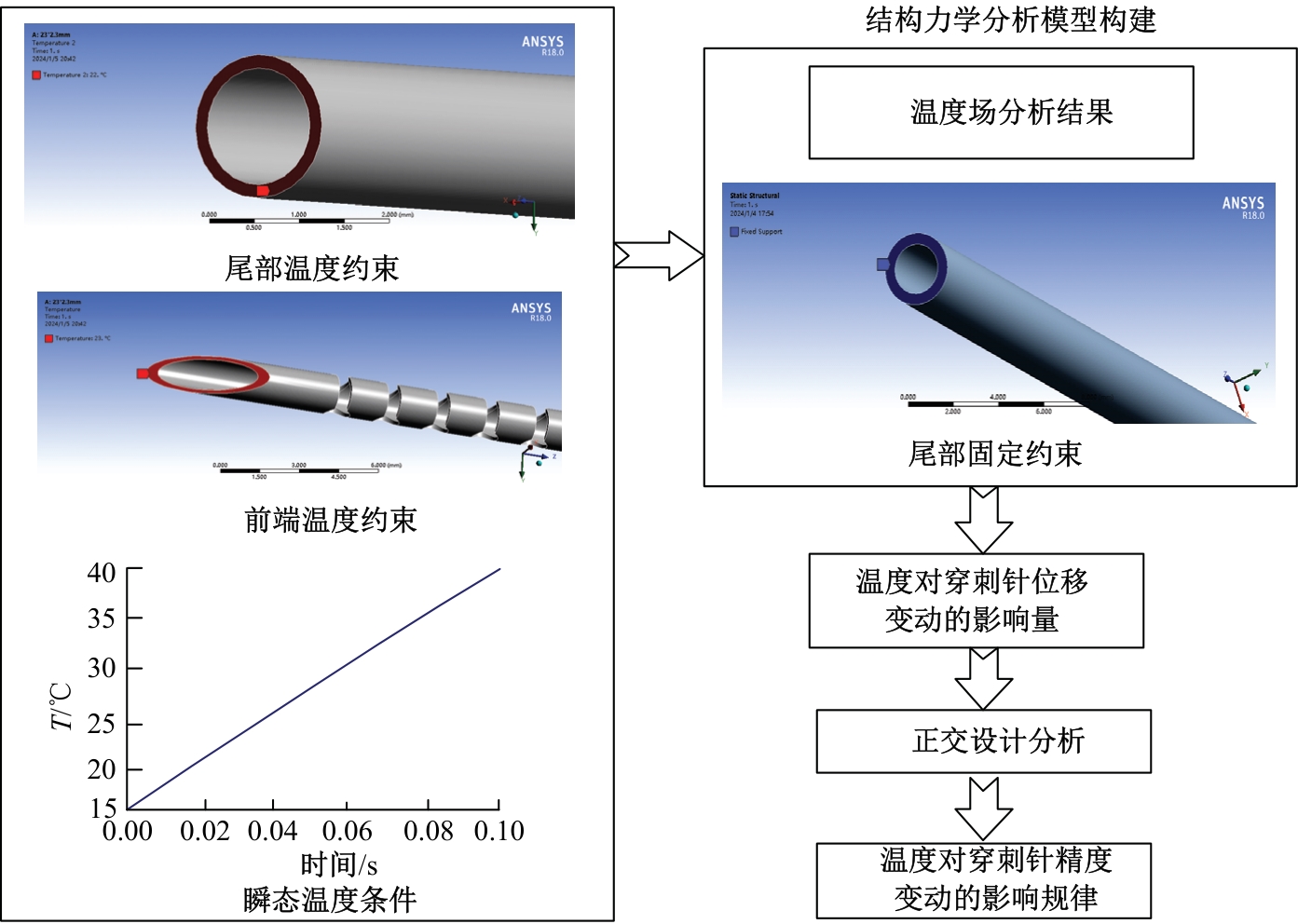
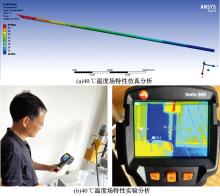
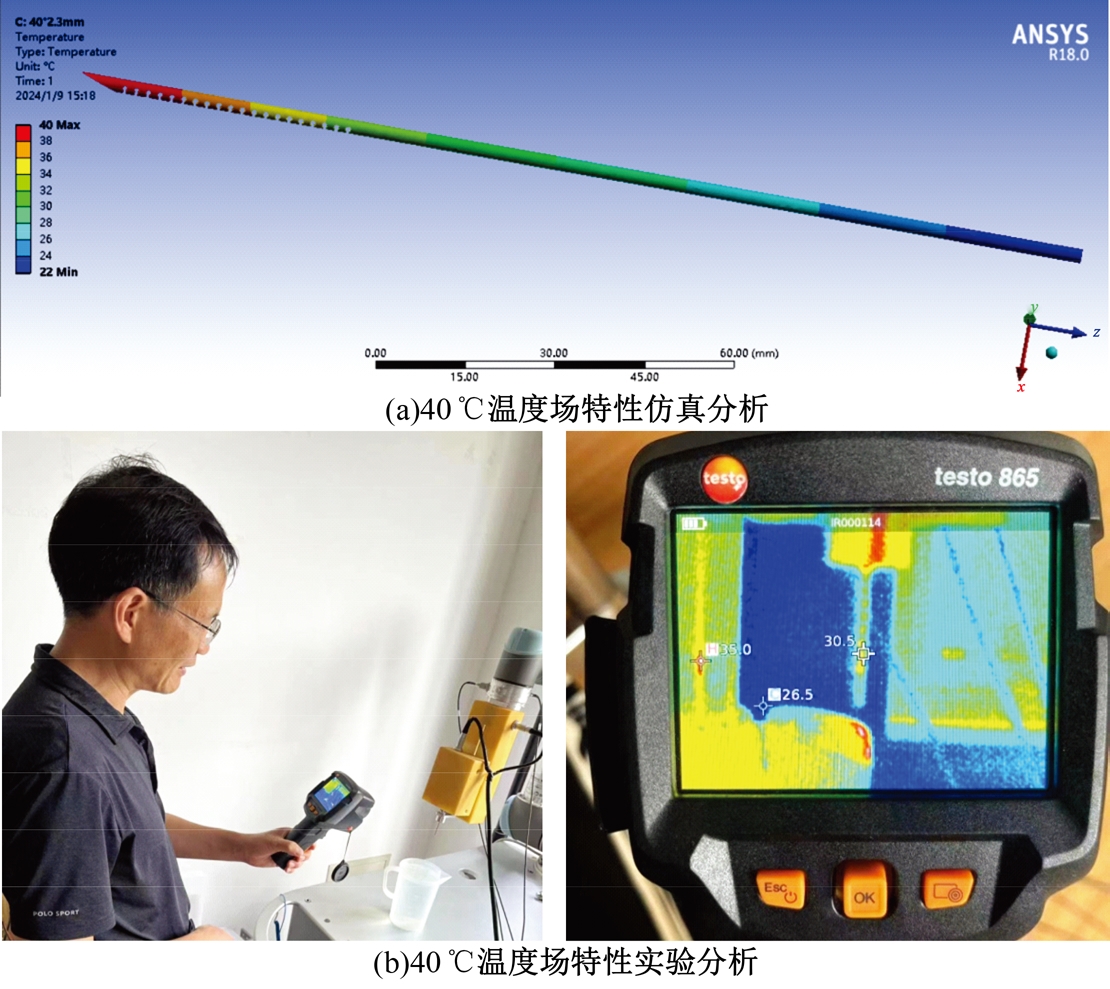
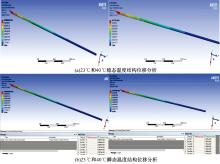
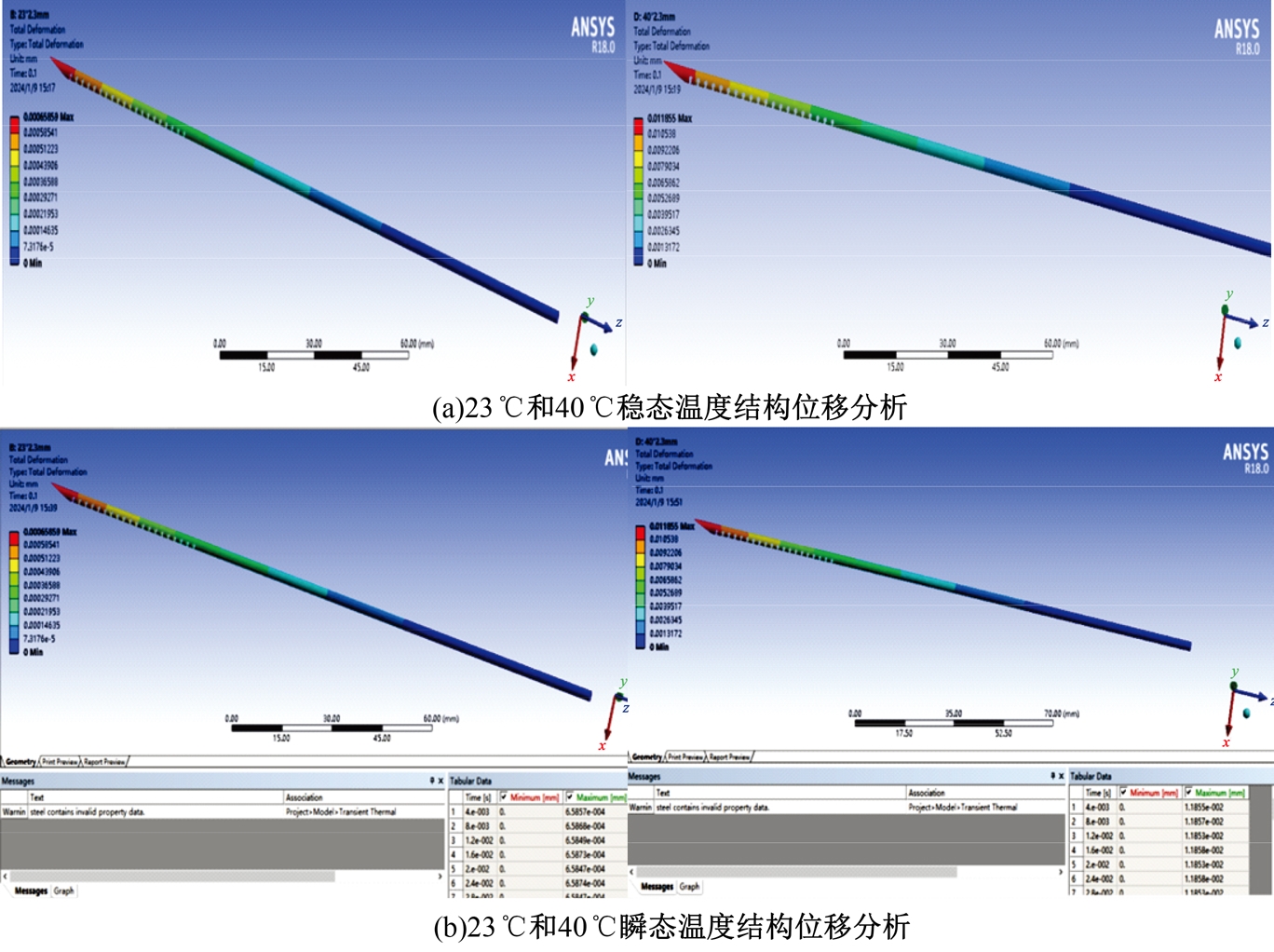
针对变路径线控机器人微米级精度微创过程,进行温度因素对穿刺精度的影响规律研究。采用热分析和结构力学分析融合的方法,获得了关键穿刺针部件非均匀温度场和结构形变特性。结合正交实验分析方法,分析了瞬态和稳态温度变化对穿刺针部件变动的影响。结果表明:23~40 ℃的瞬态和稳态温度对微米级穿刺精度影响显著,两种温度条件的精度影响指标一致:工艺参数40 ℃-3.1 mm-3 mm/s的穿刺针热变形量最大为0.012 mm,对应的系统影响量达到0.1 mm左右;另外,基于临床穿刺工艺特点,通过3因素5水平的方差分析和回归分析,揭示了钛镍合金穿刺针热因素导致的非均匀热变形规律及影响穿刺精度的温度T大于穿刺针直径D和进针速度V的影响。
中图分类号:
- TP242


| 1 | 段星光, 温浩, 何睿, 等.胸腹腔经皮穿刺机器人研究进展及关键技术分析[J]. 机器人, 2021, 43(5): 567-584. |
| Duan Xing-guang, Wen Hao, He Rui, et al. Research progress and key technology analysis of thoracoabdominal percutaneous puncture robot[J]. Robot,2021,43(5):567-584. | |
| 2 | Donder A, Baena F R. 3-D path-following control for steerable needles with fiber Bragg gratings in multi-core fibers[J]. IEEE Transactions on Biomedical Engineering, 2022, 70(3): 1072-1085. |
| 3 | 张帆, 何彦霖, 周康鹏, 等. 穿刺手术柔性针路径规划技术现状和展望[J]. 电子测量与仪器学报, 2023, 37(6): 1-13. |
| Zhang Fan, He Yan-lin, Zhou Kang-peng, et al. The current status and prospects of flexible needle path planning technology for puncture surgery[J]. Journal of Electronic Measurement and Instrumentation, 2023,37(6):1-13. | |
| 4 | Goh G S, Yue W M, Guo C M. Comparative demographics and outcomes of minimally invasive transforaminal lumbar interbody fusion in Chinese, Malays, and Indians[J]. Clinical Spine Surgery, 2021, 34(2): 66-72. |
| 5 | 王乃堃, 骆敏舟, 陆丽娟. 穿刺机器人在微创外科手术中的应用进展[J]. 中国疼痛医学杂志, 2020, 26(5): 376-380. |
| Wang Nai-kun, Luo Min-zhou, Lu Li-juan.Progress in the application of puncture robots in minimally invasive surgery[J]. Chinese Journal of Pain Medicine, 2020,26(5):376-380. | |
| 6 | Kim J E, Yoo H S, Choi D J. Comparison of minimal invasive versus biportal endoscopic transforaminal lumbar interbody fusion for single-level lumbar disease[J]. Clinical Spine Surgery, 2021, 34(2): 64-71. |
| 7 | 田伟. 我国医用机器人的研究现状及展望[J]. 骨科临床与研究杂志, 2018, 3(4): 193-197. |
| Tian Wei. The current research status and prospects of medical robots in China[J]. Journal of Clinical and Research Orthopedics, 2018, 3(4): 193-197. | |
| 8 | 李霞. 机器人辅助柔性针软组织穿刺系统研究[D].湘潭: 湘潭大学自动化与电子信息学院, 2016. |
| Li Xia. Research on robot assisted flexible needle soft tissue puncture system[D]. Xiangtan: School of Automation and Electronic Information,Xiangtan University, 2016. | |
| 9 | 王田苗, 郝雨飞, 杨兴帮, 等. 软体机器人: 结构、驱动、传感与控制[J]. 机械工程学报, 2017, 53(13): 1-12. |
| Wang Tian-miao, Hao Yu-fei, Yang Xing-bang, et al. Soft robot: structure, drive, sensing and control [J]. Journal of Mechanical Engineering, 2017, 53(13): 1-12. | |
| 10 | 霍本岩, 赵新刚, 韩建达, 等. 基于可达性决策的柔性针穿刺控制方法[J]. 控制理论与应用, 2014, 31(10):1423-1424. |
| Huo Ben-yan, Zhao Xin-gang, Han Jian-da, et al. Flexible needle puncture control method based on accessibility decision[J]. Control Theory and Application, 2014, 31(10):1423-1424. | |
| 11 | 雷静桃, 王洋, 程利亚, 等. 基于复位路径包络误差和改进人工势力场法的复位机器人安全策略[J]. 机械工程学报,2020, 56(1): 9-19. |
| Lei Jing-tao, Wang Yang, Cheng Li-ya, et al. Safety strategy for reset robots based on reset path envelope error and improved artificial force field method[J]. Journal of Mechanical Engineering, 2020, 56(1): 9-19. | |
| 12 | 张少华. 微创穿刺手术系统关键技术及穿刺定位精度实验研究[D].北京:北京理工大学机械与车辆学院, 2012. |
| Zhang Shao-hua. Experimental study on key technologies and puncture positioning accuracy of minimally invasive puncture surgery system[D].Beijing: School of Mechanical and Vehicular Engineering,Beijing Institute of Technology, 2012. | |
| 13 | 孙椰望, 刘宇行. 腰椎神经微创机器人柔性进针控制技术设计[J]. 颈腰痛杂志, 2021, 42(2): 274-278. |
| Sun Ye-wang, Liu Yu-xing. Design of flexible needle insertion control technology for lumbar spine nerve minimally invasive robot[J]. Journal of Neck and Back Pain, 2021, 42(2):274-278. | |
| 14 | 殷谦, 尚建忠. 柔性波动鳍两栖机器人鳍面结构设计与运动仿真[J]. 工程热物理学报, 2021, 42(11):2954-2960. |
| Yin Qian, Shang Jian-zhong. Design and motion simulation of fin surface structure for flexible wave fin amphibious robot[J]. Journal of Engineering Thermophysics, 2021, 42 (11): 2954-2960. | |
| 15 | 嵇建成, 王玉峰, 付建军, 等.康复助行机器人倾覆稳定性分析[J]. 工业控制计算机, 2024, 37(2): 70-72. |
| Ji Jian-cheng, Wang Yu-feng, Fu Jian-jun, et al. Stability analysis of rehabilitation walking robot overturning[J]. Industrial Control Computer, 2024, 37 (2): 70-72. | |
| 16 | 刘泽华. 柔索驱动式主动柔性针穿刺机器人机构的设计及分析[D]. 哈尔滨: 哈尔滨理工大学机械动力工程学院, 2020. |
| Liu Ze-hua. Design and analysis of a flexible cable driven active flexible needle puncture robot mechanism[D]. Harbin:School of Mechanical and Power Engineering,Harbin University of Science and Technology, 2020. | |
| 17 | 董欣勃, 魏操兵, 商晋. 冷压缩机温度场仿真及其冷却参数优化分析[J]. 工程热物理学报, 2020, 41(8): 1851-1860. |
| Dong Xin-bo, Wei Cao-bing, Shang Jin.Simulation of temperature field and optimization analysis of cooling parameters for cold compressors[J]. Journal of Engineering Thermophysics, 2020, 41 (8): 1851-1860. | |
| 18 | 王文涛. RV减速器热——结构耦合分析[D]. 北京:北方工业大学机械与材料工程学院,2016. |
| Wang Wen-tao.Thermal structural coupling analysis of RV reducer[D].Beijing:School of Mechanical and Materials Engineering, North China University of Technology,2016. | |
| 19 | 董年鑫, 王希贵, 吴哲, 等. 基于热固耦合的林区原油管道机器人壳体优化分析[J]. 森林工程, 2022, 38(1): 101-107. |
| Dong Nian-xin, Wang Xi-gui, Wu Zhe, et al. Optimization analysis of robot shell for crude oil pipeline in forest areas based on thermal solid coupling[J]. Forest Engineering, 2022,38(1): 101-107. | |
| 20 | 卢博文. 摆线针轮传动系统热分析[D]. 大连: 大连交通大学机械工程学院,2021. |
| Lu Bo-wen. Thermal analysis of cycloid needle wheel transmission system[D].Dalian:School of Mechanical Engineering, Dalian Jiaotong University, 2021. |
| [1] | 王旭. 四足机器人运动及稳定控制关键技术综述[J]. 吉林大学学报(工学版), 2025, 55(5): 1483-1496. |
| [2] | 赵彬,吴成东,张雪娇,孙若怀,姜杨. 基于注意力机制的机械臂目标抓取网络技术[J]. 吉林大学学报(工学版), 2024, 54(12): 3423-3432. |
| [3] | 郑玉坤,孙如月,李凤鸣,刘义祥,李东广,宋锐. 液压机械臂集中式驱控系统研究与应用[J]. 吉林大学学报(工学版), 2024, 54(11): 3358-3371. |
| [4] | 刘洋. 橡胶鞋底弹性打磨仿真及试验[J]. 吉林大学学报(工学版), 2024, 54(8): 2167-2173. |
| [5] | 刘洋,江涛. 计及安装角的六自由度平台虎克铰干涉计算模型[J]. 吉林大学学报(工学版), 2024, 54(6): 1519-1527. |
| [6] | 刘谦,张祝新,赵丁选,王立新,王亚非. 基于能量回收的新型电伺服作动器及其动态能耗分析[J]. 吉林大学学报(工学版), 2024, 54(5): 1196-1204. |
| [7] | 赵新刚,王桢. 基于改进MOEA/D算法的含可再生能源系统协同优化调度[J]. 吉林大学学报(工学版), 2024, 54(4): 1129-1135. |
| [8] | 孙帅帅,冯春晓,张良. 基于离散采样的多模态四足机器人路径规划[J]. 吉林大学学报(工学版), 2024, 54(4): 1120-1128. |
| [9] | 聂建军,侯军凯,解晓琳,鄢鸿桢. 新型巡检机器人移动底盘设计及越障性能分析[J]. 吉林大学学报(工学版), 2024, 54(2): 356-364. |
| [10] | 张铮,朱齐丹,吕晓龙,樊星. 冗余机械臂运动学逆解的求解优化方法[J]. 吉林大学学报(工学版), 2023, 53(12): 3379-3387. |
| [11] | 刘春晖,王思长,郑策,陈秀连,郝春蕾. 基于深度学习的室内导航机器人避障规划算法[J]. 吉林大学学报(工学版), 2023, 53(12): 3558-3564. |
| [12] | 王晓鸣,李腾. 壁面清洗水下机器人清洗性能分析与试验[J]. 吉林大学学报(工学版), 2023, 53(11): 3062-3068. |
| [13] | 张楠,史建华,亿吉,王平. 基于加权质心定位的井下移动目标实时跟踪方法[J]. 吉林大学学报(工学版), 2023, 53(5): 1458-1464. |
| [14] | 徐卓君,王耀祥,黄兴,彭程. 多无人机地面移动目标搜寻和定位[J]. 吉林大学学报(工学版), 2023, 53(3): 832-840. |
| [15] | 张帅帅,尹燕芳,肖林京,姜帅. 基于门控循环神经网络的四足机器人静步态规划方法[J]. 吉林大学学报(工学版), 2023, 53(3): 902-912. |
|