吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (12): 3558-3564.doi: 10.13229/j.cnki.jdxbgxb.20221013
• 计算机科学与技术 • 上一篇
基于深度学习的室内导航机器人避障规划算法
刘春晖( ),王思长,郑策,陈秀连,郝春蕾
),王思长,郑策,陈秀连,郝春蕾
- 山东科技大学 电气与自动化工程学院,山东 青岛 266590
Obstacle avoidance planning algorithm for indoor navigation robot based on deep learning
Chun-hui LIU(),Si-chang WANG,Ce ZHENG,Xiu-lian CHEN,Chun-lei HAO
- College of Electrical Engineering and Automation,Shandong University of Science and Technology,Qingdao 266590,China
摘要:
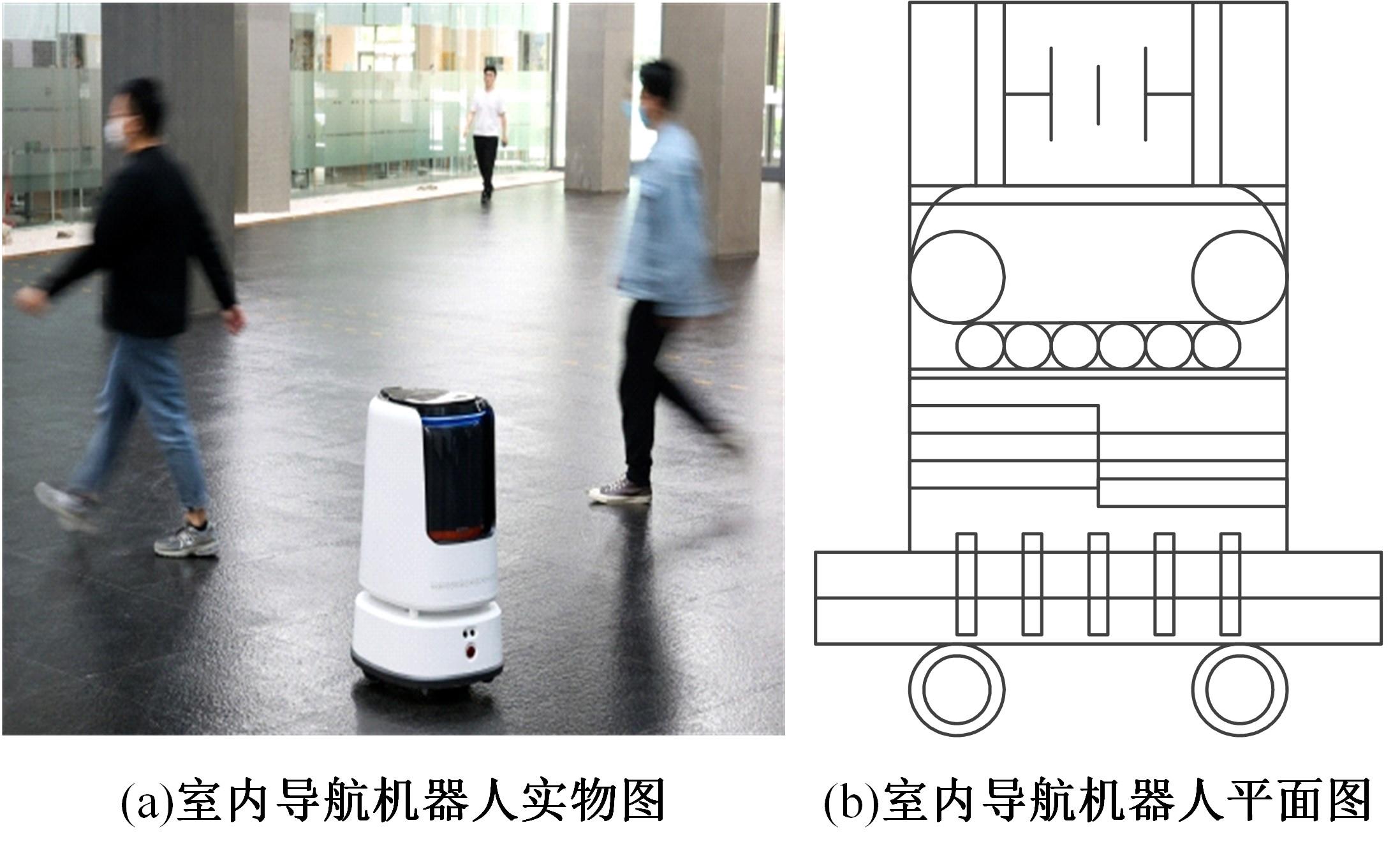
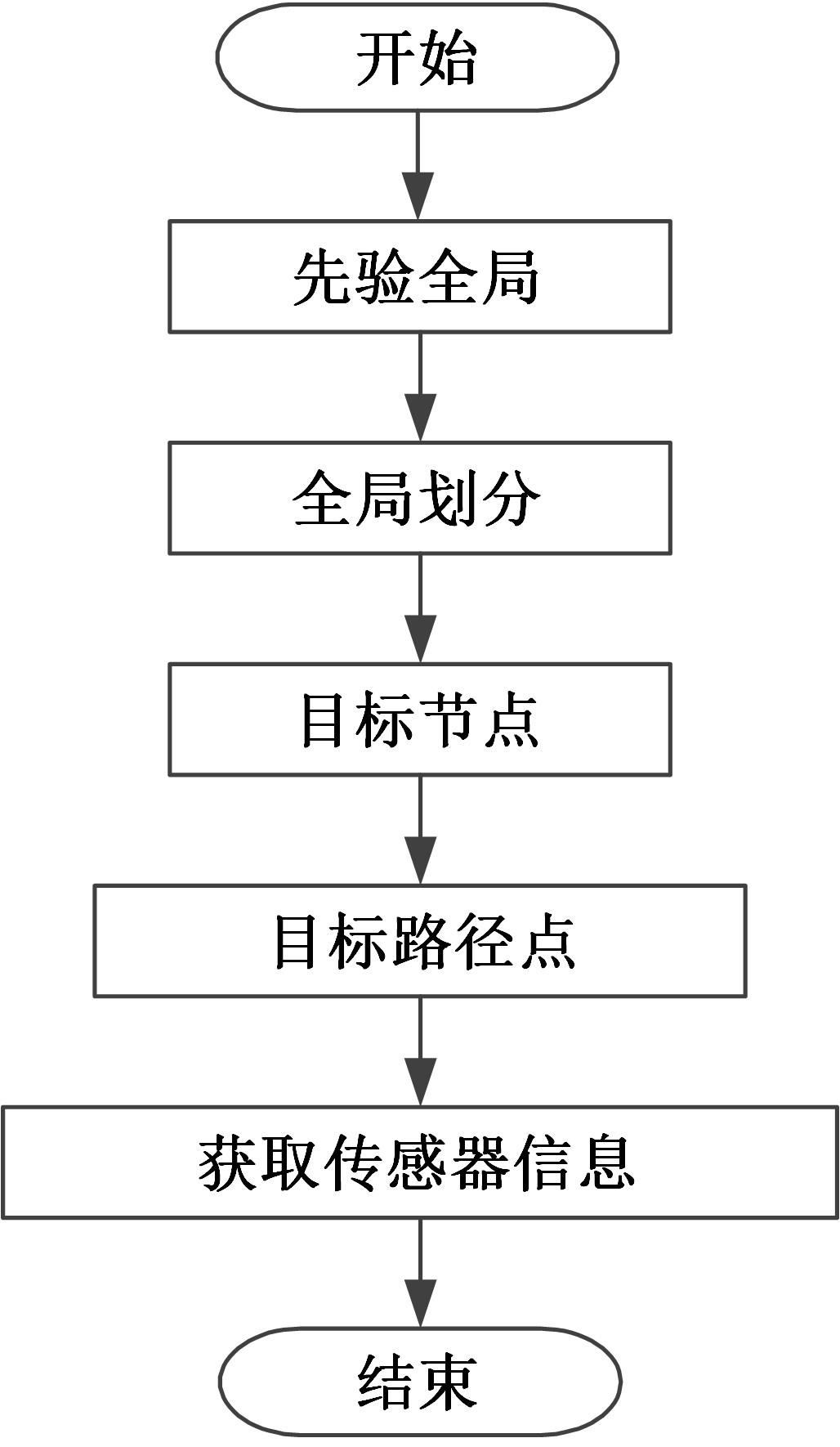
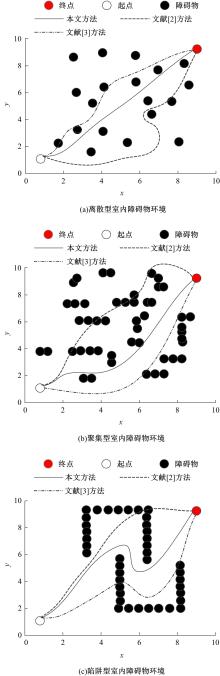
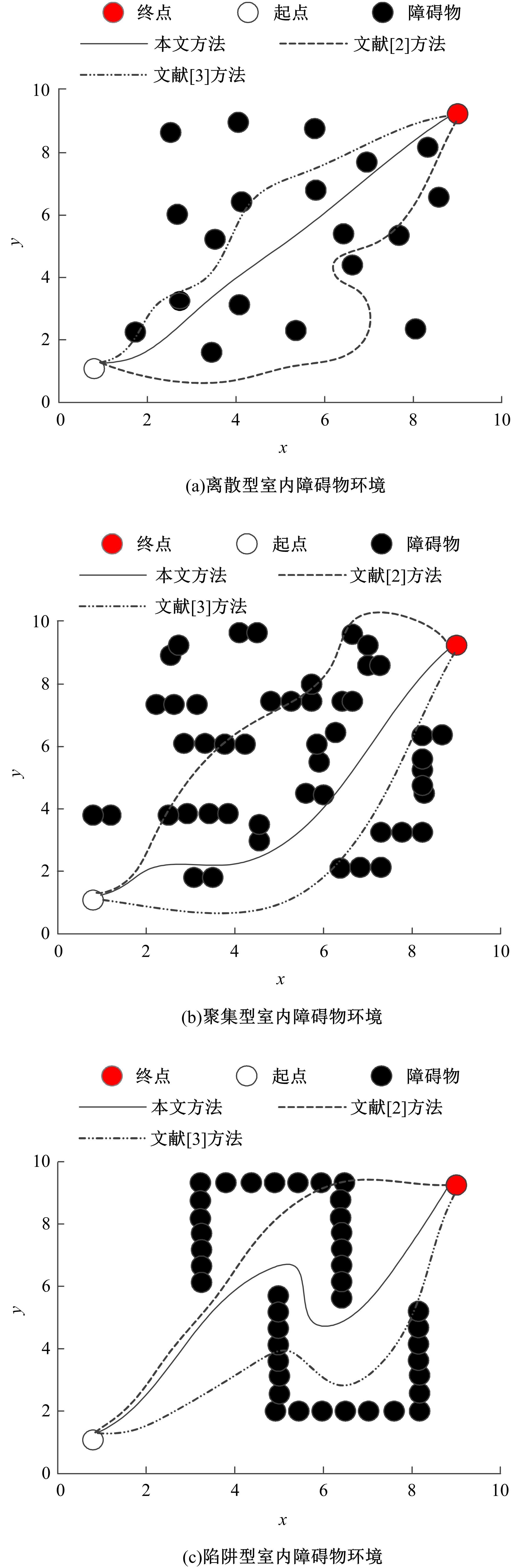
为降低机器人与障碍物的碰撞几率,提高机器人工作效率,提出了一种基于深度学习的室内导航机器人避障规划算法。首先,通过室内导航机器人导航系统,结合深度学习提高机器人对所处环境中移动障碍物与非移动障碍物的检测和识别能力,进而获取与实际场景更加吻合的反应式避障导航实用信息。然后,利用该信息构建仿真地图,通过在仿真地图内筛选出一条最优任务执行路线,解决了由于障碍物杂乱无规则导致的避障规划难度大的问题,实现了室内导航机器人避障规划。实验结果表明,本文方法避障路径更加可靠、避障规划时间不超过1.2 s,有效提升了室内导航机器人的避障精度及工作效率。
中图分类号:
- TP242




| 1 | 华英杰, 王艳, 纪志成. 基于无轨导航的室内机器人路径规划及实现[J]. 扬州大学学报: 自然科学版, 2020, 23(6): 34-38. |
| Hua Ying-jie, Wang Yan, Ji Zhi-cheng. Path planning and implementation of indoor robot based on trackless navigation[J]. Journal of Yangzhou University (Natural Science Edition), 2020,23(6): 34-38. | |
| 2 | 万俊, 姚佳烽, 余亮, 等. 基于伪距离的冗余机器人避障算法[J].机械工程学报, 2020, 56(17): 59-70. |
| Wan Jun, Yao Jia-feng, Yu Liang, et al. Obstacle avoidance algorithm for redundant manipulators based on pseudo-distance method[J]. Journal of Mechanical Engineering, 2020, 56(17): 59-70. | |
| 3 | 孙立香, 孙晓娴, 刘成菊, 等. 人群环境中基于深度强化学习的移动机器人避障算法[J]. 信息与控制, 2022, 51(1): 107-118. |
| Sun Li-xiang, Sun Xiao-xian, Liu Cheng-ju, et al. Obstacle avoidance algorithm for mobile robot based on deep reinforcement learning in crowd environment[J]. Information and Control, 2022, 51(1): 107-118. | |
| 4 | 卞永明, 季鹏成, 周怡和,等. 基于改进型DWA的移动机器人避障路径规划[J].中国工程机械学报, 2021, 19(1): 44-49. |
| Bian Yong-ming, Ji Peng-cheng, Zhou Yi-he, et al. Obstacle avoidance path planning of mobile robot based on improved DWA[J]. Chinese Journal of Construction Machinery, 2021, 19(1): 44-49. | |
| 5 | 孙顺远, 于敬源. 一种针对异构设备和环境变化的室内定位算法[J].吉林大学学报: 理学版, 2023, 61(4): 915-921. |
| Sun Shun-yuan, Yu Jing-yuan. An indoor location algorithm for heterogeneous devices and environmental changes[J]. Journal of Jilin University (Science Edition), 2023, 61(4): 915-921. | |
| 6 | 王闯, 屠晓伟. 基于三线阵CCD的室内导航方法研究[J].燕山大学学报,2021,45(4):312-320, 327. |
| Wang Chuang, Tu Xiao-wei. Research on indoor navigation method based on three linear CCDs[J]. Journal of Yanshan University, 2021, 45(4): 312-320, 327. | |
| 7 | 吴东明, 王丽娟. 采摘机器人避障控制系统研究——基于ARM+DSP和视觉传感器[J]. 农机化研究, 2020, 42(4): 218-222. |
| Wu Dong-ming, Wang Li-juan. Research on obstacle avoidance control system of picking robot-based on ARM+DSP and visual sensor[J]. Journal of Agricultural Mechanization Research, 2020, 42(4): 218-222. | |
| 8 | 张香竹, 张立家, 宋逸凡, 等. 基于深度学习的无人机单目视觉避障算法[J].华南理工大学学报: 自然科学版, 2022,50(1): 101-108, 131. |
| Zhang Xiang-zhu, Zhang Li-jia, Song Yi-fan, et al. Obstacle avoidance algorithm for unmanned aerial vehicle vision based on deep learning[J]. Journal of South China University of Technology (Natural Science Edition), 2022, 50(1): 101-108, 131. | |
| 9 | 揭吁菡, 熊丽婷. 机器人视觉导航传感器光栅投射误差校正仿真[J]. 计算机仿真, 2021, 38(9): 381-385. |
| Xu-han Jie, Xiong Li-ting. Simulation of grating projection error correction of robot vision navigation sensor[J]. Computer Simulation, 2021, 38(9): 381-385. | |
| 10 | 李晓峰, 任杰, 李东. 基于深度强化学习的移动机器人视觉图像分级匹配算法[J]. 吉林大学学报: 理学版, 2023, 61(1): 127-135. |
| Li Xiao-feng, Ren Jie, Li Dong. Hierarchical matching algorithm of visual image for mobile robots based on deep reinforcement learning[J]. Journal of Jilin University (Science Edition), 2023, 61(1): 127-135. |
| [1] | 霍光,林大为,刘元宁,朱晓冬,袁梦,盖迪. 基于多尺度特征和注意力机制的轻量级虹膜分割模型[J]. 吉林大学学报(工学版), 2023, 53(9): 2591-2600. |
| [2] | 金小俊,孙艳霞,于佳琳,陈勇. 基于深度学习与图像处理的蔬菜苗期杂草识别方法[J]. 吉林大学学报(工学版), 2023, 53(8): 2421-2429. |
| [3] | 耿庆田,刘植,李清亮,于繁华,李晓宁. 基于一种深度学习模型的土壤湿度预测[J]. 吉林大学学报(工学版), 2023, 53(8): 2430-2436. |
| [4] | 巫威眺,曾坤,周伟,李鹏,靳文舟. 基于多源数据和响应面优化的公交客流预测深度学习方法[J]. 吉林大学学报(工学版), 2023, 53(7): 2001-2015. |
| [5] | 李健,熊琦,胡雅婷,刘孔宇. 基于Transformer和隐马尔科夫模型的中文命名实体识别方法[J]. 吉林大学学报(工学版), 2023, 53(5): 1427-1434. |
| [6] | 张振海,季坤,党建武. 基于桥梁裂缝识别模型的桥梁裂缝病害识别方法[J]. 吉林大学学报(工学版), 2023, 53(5): 1418-1426. |
| [7] | 吴飞,农皓业,马晨浩. 基于粒子群优化算法⁃长短时记忆模型的刀具磨损预测方法[J]. 吉林大学学报(工学版), 2023, 53(4): 989-997. |
| [8] | 何科,丁海涛,赖宣淇,许男,郭孔辉. 基于Transformer的轮式里程计误差预测模型[J]. 吉林大学学报(工学版), 2023, 53(3): 653-662. |
| [9] | 吕晓琪,李浩,谷宇. 基于深度学习算法的人脸图像活体特征变换尺度提取[J]. 吉林大学学报(工学版), 2023, 53(11): 3201-3206. |
| [10] | 王军,王华琳,黄博文,付强,刘俊. 基于联邦学习和自注意力的工业物联网入侵检测[J]. 吉林大学学报(工学版), 2023, 53(11): 3229-3237. |
| [11] | 孙舒杨,程玮斌,张浩桢,邓向萍,齐红. 基于深度学习的两阶段实时显式拓扑优化方法[J]. 吉林大学学报(工学版), 2023, 53(10): 2942-2951. |
| [12] | 曲优,李文辉. 基于多任务联合学习的多目标跟踪方法[J]. 吉林大学学报(工学版), 2023, 53(10): 2932-2941. |
| [13] | 高金武,贾志桓,王向阳,邢浩. 基于PSO-LSTM的质子交换膜燃料电池退化趋势预测[J]. 吉林大学学报(工学版), 2022, 52(9): 2192-2202. |
| [14] | 申铉京,张雪峰,王玉,金玉波. 像素级卷积神经网络多聚焦图像融合算法[J]. 吉林大学学报(工学版), 2022, 52(8): 1857-1864. |
| [15] | 白天,徐明蔚,刘思铭,张佶安,王喆. 基于深度神经网络的诉辩文本争议焦点识别[J]. 吉林大学学报(工学版), 2022, 52(8): 1872-1880. |
|
||