吉林大学学报(工学版) ›› 2021, Vol. 51 ›› Issue (2): 738-746.doi: 10.13229/j.cnki.jdxbgxb20191201
• 通信与控制工程 • 上一篇
一种基于模型预测复合控制的车辆避碰控制方法
李寿涛1,2( ),王蕊2,徐靖淳2,王德军1,2,田彦涛1,2,于丁力3
),王蕊2,徐靖淳2,王德军1,2,田彦涛1,2,于丁力3
- 1.吉林大学 汽车仿真与控制国家重点实验室,长春 130022
2.吉林大学 通信工程学院,长春 130022
3.利物浦约翰摩尔大学 工程与技术学院,利物浦 L33AF
A vehicle collision avoidance control method based on model predictive composite control
Shou-tao LI1,2(),Rui WANG2,Jing-chun XU2,De-jun WANG1,2,Yan-tao TIAN1,2,Ding-li YU3
- 1.State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun 130022,China
2.College of Communication Engineering,Jilin University,Changchun 130022,China
3.School of Engineering and Technology,Liverpool John Moores University,Liverpool L33AF,UK
摘要:
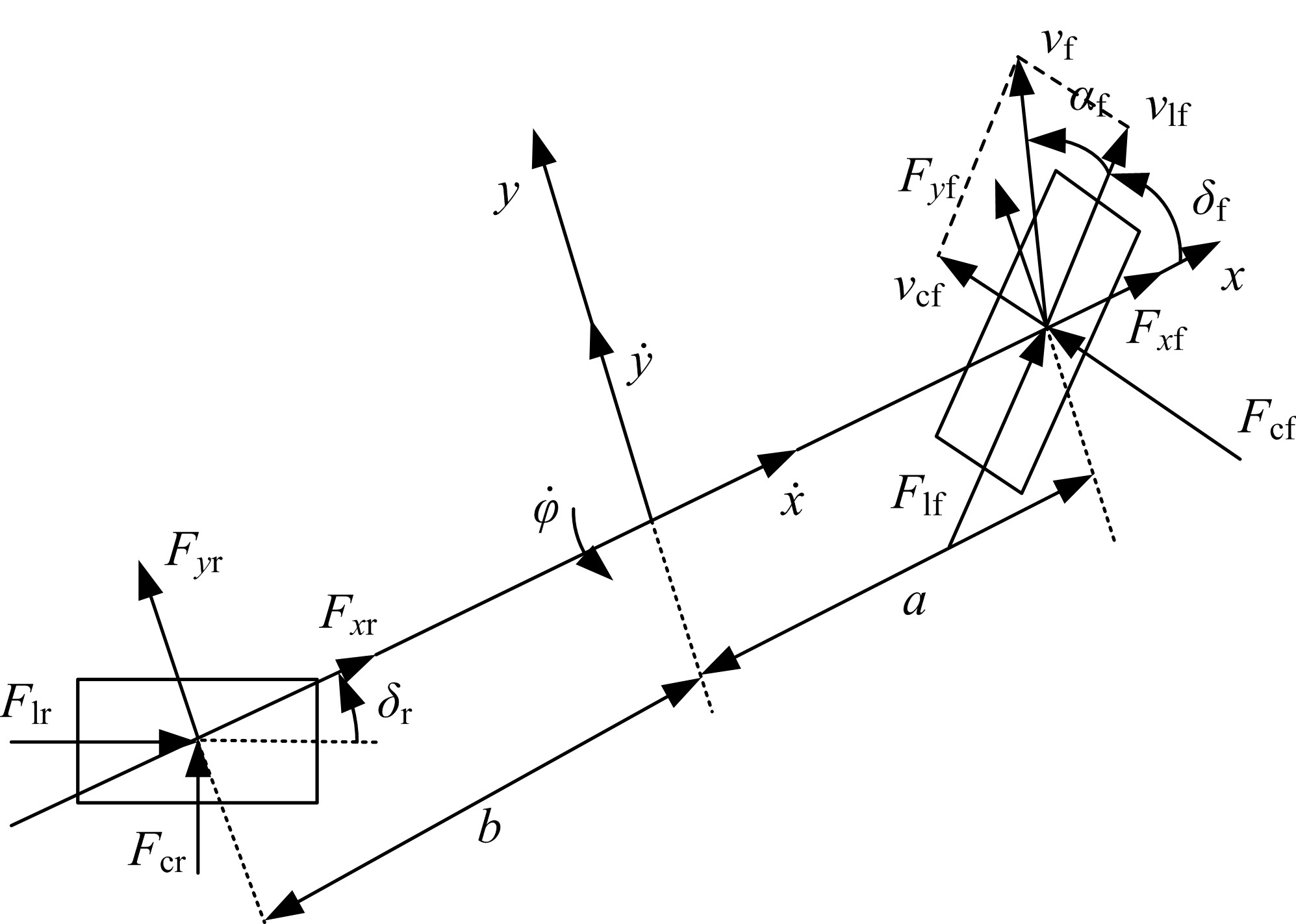
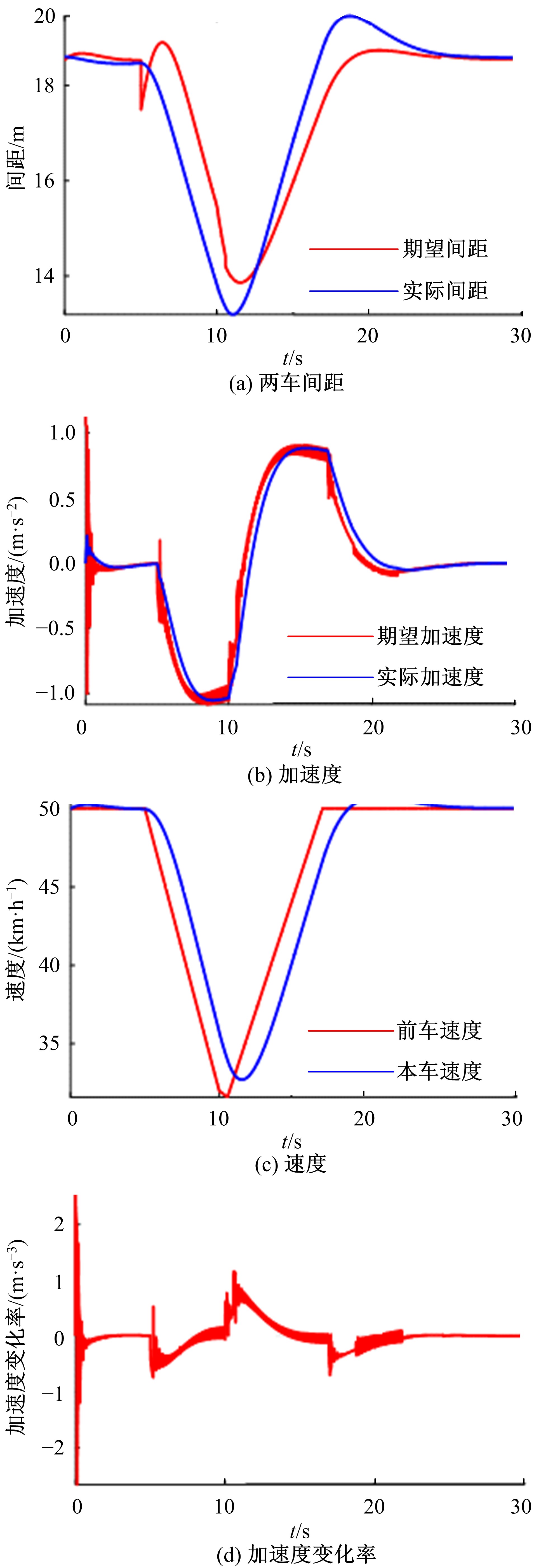
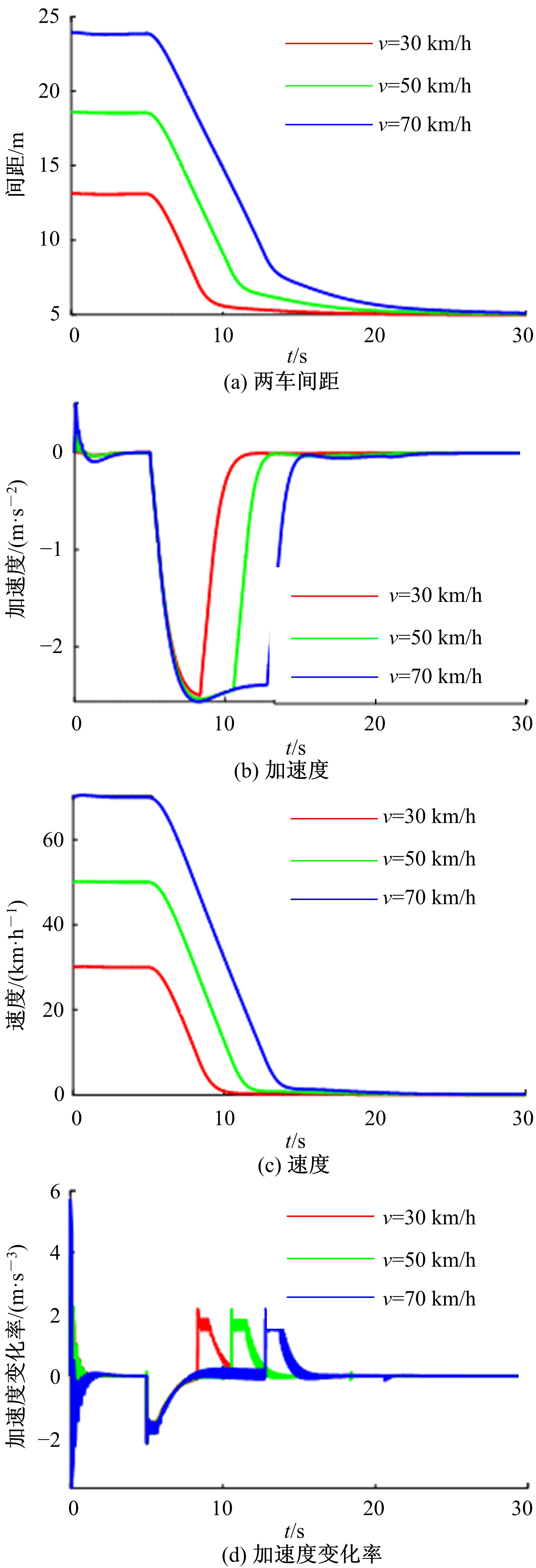
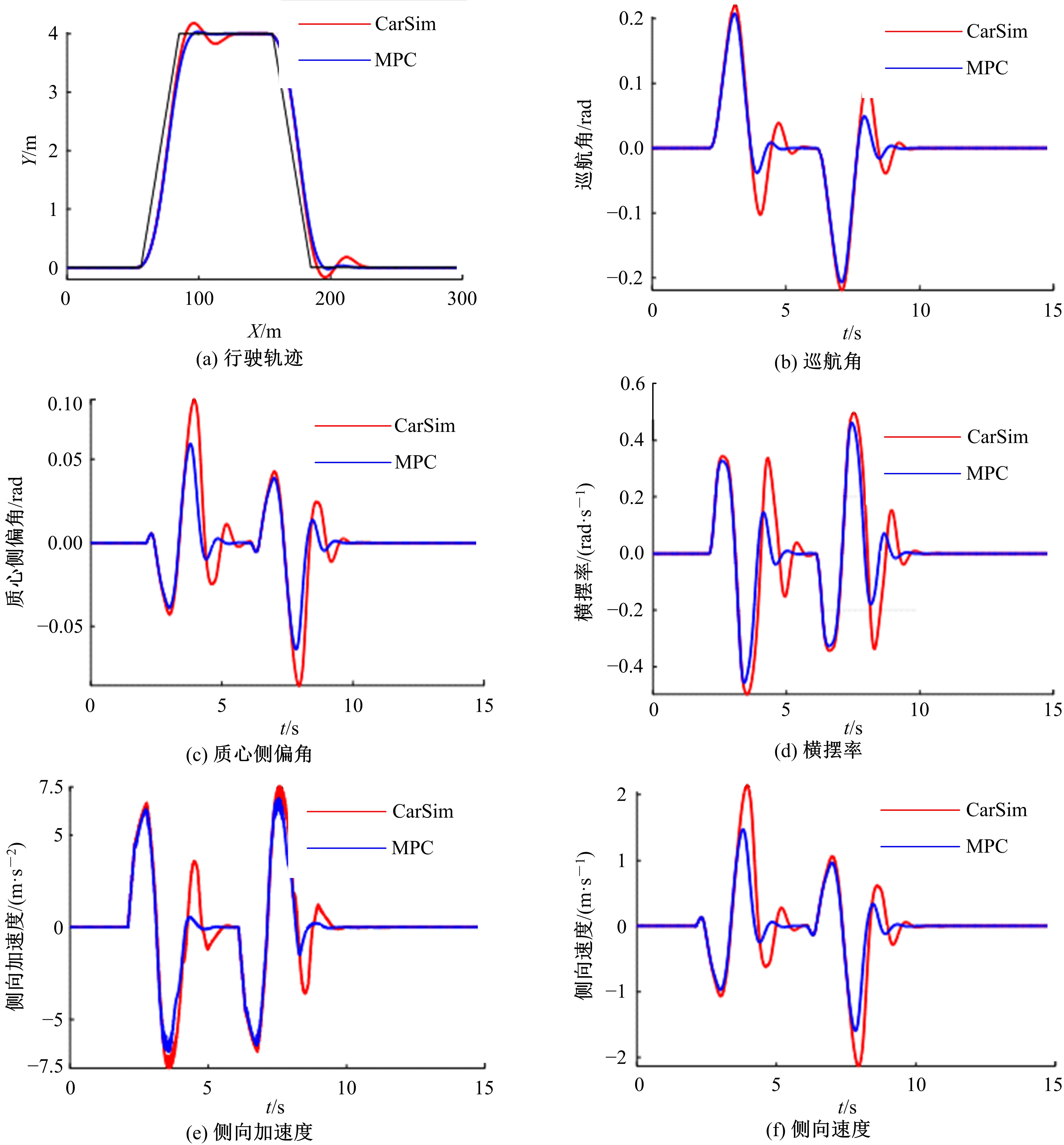
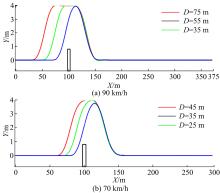
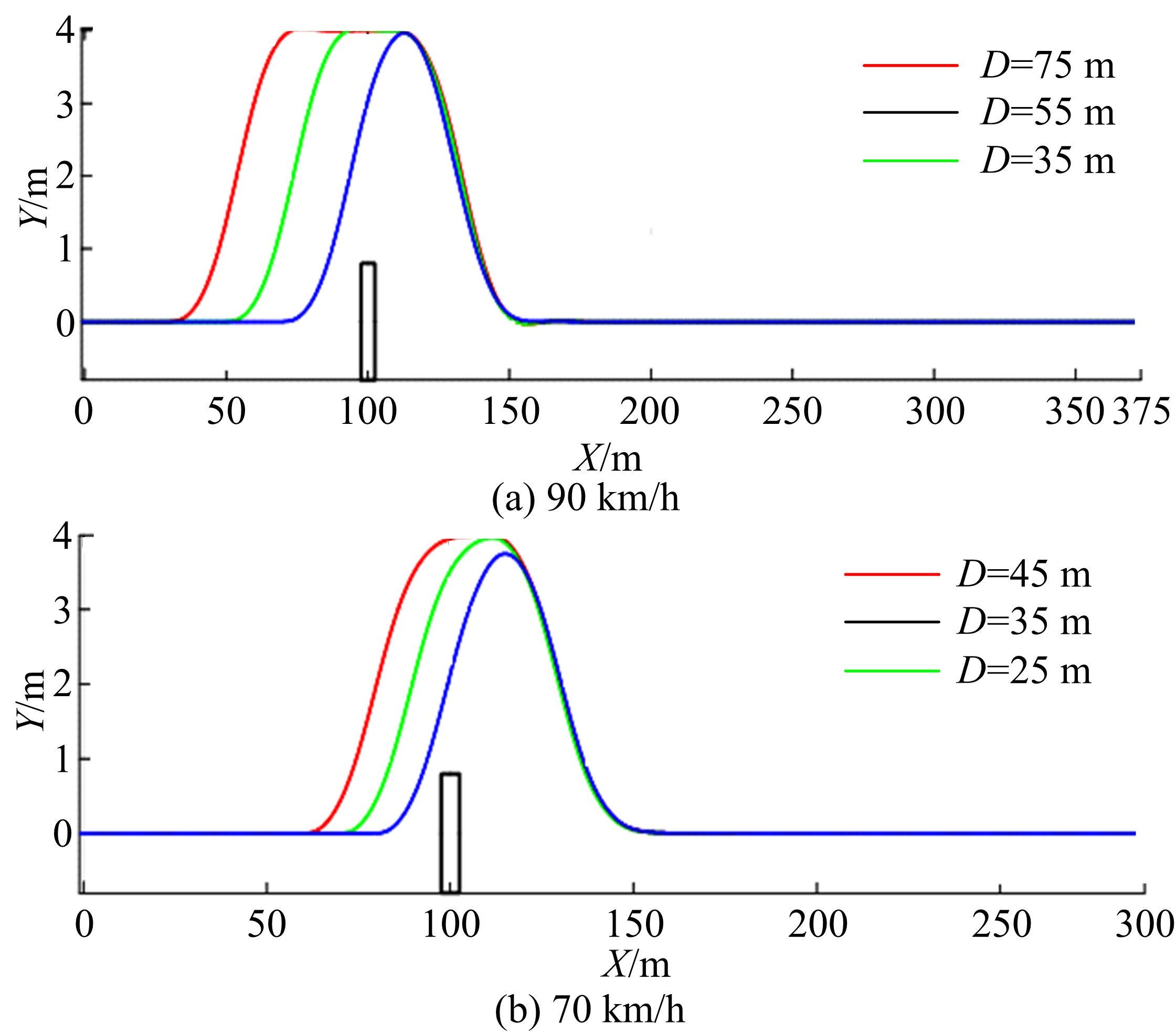
为减少日益增长的交通安全问题,车辆碰撞预警及避碰控制系统必不可少。本文提出了一种结合车辆横纵向动力学的复合控制避碰方法,以达到减少交通事故发生的目的。首先,分别建立了车辆逆纵向和横向动力学模型,纵向控制器通过安全距离模型来判断车辆是否处于危险状态并进行碰撞预警,采用分层控制方法设计了上层模型预测控制器和底层单神经元PID控制器。横向上结合不同时速时的参数约束设计模型预测控制器。最后,在不同工况下进行了仿真实验,表明本文控制系统能成功避碰,提高了车辆的安全性、稳定性、舒适性。
中图分类号:
- TP273






| 1 | 李静, 石求军, 刘鹏, 等. 基于纵向车速估算的商用车ABS神经网络滑模控制[J]. 吉林大学学报: 工学版, 2019, 49(4): 1017-1025. |
| Li Jing, Shi Qiu-jun, Liu Peng, et al.ABS neural network sliding mode control for commercial vehicles based on longitudinal speed estimation[J]. Journal of Jilin University (Engineering and Technology Edition), 2019, 49(4): 1017-1025. | |
| 2 | Sazgar H, Azadi S, Kazemi R, et al. Integrated longitudinal and lateral guidance of vehicles in critical high speed manoeuvres[J]. Proceedings of the Institution of Mechanical Engineers, 2019, 233(4): 994-1013. |
| 3 | Yuan H, Sun X, Gordon T. Unified decision-making and control for highway collision avoidance using active front steer and individual wheel torque control[J]. Vehicle System Dynamics, 2019, 57(8): 1188-1205. |
| 4 | Gao Y, Gordon T, Lidberg M. Optimal control of brakes and steering for autonomous collision avoidance using modified Hamiltonian algorithm[J]. Vehicle System Dynamics, 2019, 57(10): 1-17. |
| 5 | Liu Y, Zhao Y, Hu Z, et al. Collision-avoidance reliability analysis of automated vehicle based on adaptive surrogate modeling[J].ASCE-ASME Journal of Risk and Uncertainty in Engineering Systems, 2019, 5(2): 020906. |
| 6 | Abdul-Hamid U Z, Zamzuri H, Yamada T, et al. Modular design of artificial potential field and nonlinear model predictive control for a vehicle collision avoidance system with move blocking strategy[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2018, 232(10): 1353-1373. |
| 7 | Yang W, Zhang X, Lei Q, et al. Research on longitudinal active collision avoidance of autonomous emergency braking pedestrian system (AEB-P)[J]. Sensors, 2019, 19(21): 4671-4704. |
| 8 | Cheng S, Li L, Guo H Q, et al. Longitudinal collision avoidance and lateral stability adaptive control system based on MPC of autonomous vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 21(6): 2376-2385. |
| 9 | 丁建峰, 关志伟, 杜峰, 等. 基于安全距离模型的车辆跟随控制与仿真[J]. 天津职业技术师范大学学报, 2017, 27(3): 24-29, 33. |
| Ding Jian-feng, Guan Zhi-wei, Du Feng, et al. Vehicle following control and simulation based on safe distance model[J]. Journal of Tianjin Vocational and Technical Normal University, 2017, 27(3): 24-29, 33. | |
| 10 | 侯德藻, 高锋, 李克强, 等. 应用于汽车主动避撞系统的车辆纵向动力学模型[J]. 清华大学学报: 自然科学版, 2004, 44(2): 258-261. |
| Hou De-zao, Gao Feng, Li Ke-qiang, et al. Vehicle longitudinal dynamics model applied to active collision avoidance system [J]. Journal of Tsinghua University (Natural Science Edition), 2004, 44(2): 258-261. | |
| 11 | 任泽建. 基于联合仿真的车辆主动避碰控制方法研究[D]. 大连: 大连理工大学汽车工程学院, 2015. |
| Ren Ze-jian. Research on vehicle active collision avoidance control method based on joint simulation[D]. Dalian: School of Automotive Engineering, Dalian University of Technology, 2015. | |
| 12 | Zheng H, Zhou J, Shao Q, et al. Investigation of a longitudinal and lateral lane-changing motion planning model for intelligent vehicles in dynamical driving environments[J]. IEEE Access, 2019, 7: 44783-44802. |
| 13 | 田彦涛, 王晓玉, 胡蕾蕾, 等.电动汽车侧向换道行驶主动避撞控制算法[J]. 吉林大学学报: 工学版,2016, 46(5): 1587-1594. |
| Tian Yan-tao, Wang Xiao-yu, Hu Lei-lei, et al.Active collision avoidance control algorithm for electric vehicle lateral lane change[J]. Journal of Jilin University (Engineering and Technology Edition), 2016, 46(5): 1587-1594. |
| [1] | 陈国迎,姚军,王鹏,夏其坤. 适用于后轮轮毂驱动车辆的稳定性控制策略[J]. 吉林大学学报(工学版), 2021, 51(2): 397-405. |
| [2] | 王伟达,武燕杰,史家磊,李亮. 基于驾驶员意图识别的电子液压制动助力系统控制策略[J]. 吉林大学学报(工学版), 2021, 51(2): 406-413. |
| [3] | 吴岛,张立斌,张云翔,单洪颖,单红梅. 基于滑移率辨识的汽车制动时序视觉检测方法[J]. 吉林大学学报(工学版), 2021, 51(1): 206-216. |
| [4] | 张恩慧,何仁,苏卫东. 不同挡板结构对油箱内油液晃动特性的数值分析[J]. 吉林大学学报(工学版), 2021, 51(1): 83-95. |
| [5] | 马芳武,梁鸿宇,王强,蒲永锋. 双材料负泊松比结构的面内冲击动力学性能[J]. 吉林大学学报(工学版), 2021, 51(1): 114-121. |
| [6] | 熊璐,魏琰超,高乐天. 基于惯性测量单元/轮速融合的车辆零速检测方法[J]. 吉林大学学报(工学版), 2021, 51(1): 134-138. |
| [7] | 陈吉清,蓝庆生,兰凤崇,刘照麟. 基于轮胎力预判与拟合的轨迹跟踪控制[J]. 吉林大学学报(工学版), 2020, 50(5): 1565-1573. |
| [8] | 杨志刚,范亚军,夏超,储世俊,单希壮. 基于双稳态尾迹的方背Ahmed模型减阻[J]. 吉林大学学报(工学版), 2020, 50(5): 1635-1644. |
| [9] | 沈哲,王毅刚,杨志刚,贺银芝. 风洞中未知声源漂移误差的逼近修正[J]. 吉林大学学报(工学版), 2020, 50(5): 1584-1589. |
| [10] | 刘钊,程江琳,朱玉田,郑立辉. 轨道车辆垂向振动建模及运动关联分析[J]. 吉林大学学报(工学版), 2020, 50(5): 1600-1607. |
| [11] | 杜常清,曹锡良,何彪,任卫群. 基于混合粒子群算法的双离合变速器参数优化设计[J]. 吉林大学学报(工学版), 2020, 50(5): 1556-1564. |
| [12] | 高菲,肖阳,张文华,祁锦轩,李子樵,马骁远. 高温和荷电状态对锂离子电池单体力学响应的耦合影响[J]. 吉林大学学报(工学版), 2020, 50(5): 1574-1583. |
| [13] | 李静,石求军,洪良,刘鹏. 基于车辆状态估计的商用车ESC神经网络滑模控制[J]. 吉林大学学报(工学版), 2020, 50(5): 1545-1555. |
| [14] | 陈鑫,王宁,沈传亮,冯晓,杨昌海. 后视镜造型对前侧窗气动噪声的影响[J]. 吉林大学学报(工学版), 2020, 50(2): 426-436. |
| [15] | 李小雨,许男,仇韬,郭孔辉. 各向异性刚度对轮胎力学特性及车辆操纵性的影响[J]. 吉林大学学报(工学版), 2020, 50(2): 389-398. |
|
||