吉林大学学报(工学版) ›› 2022, Vol. 52 ›› Issue (10): 2225-2233.doi: 10.13229/j.cnki.jdxbgxb20210294
• 车辆工程·机械工程 • 上一篇
基于Popov超稳定性的分布式电动汽车稳定性控制
赵又群( ),李宇昊,邓汇凡,林涛,林棻
),李宇昊,邓汇凡,林涛,林棻
- 南京航空航天大学 能源与动力学院,南京 210016
Stability control of distributed electric vehicle based on Popov hyperstability
You-qun ZHAO(),Yu-hao LI,Hui-fan DENG,Tao LIN,Fen LIN
- College of Energy and Power Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China
摘要:
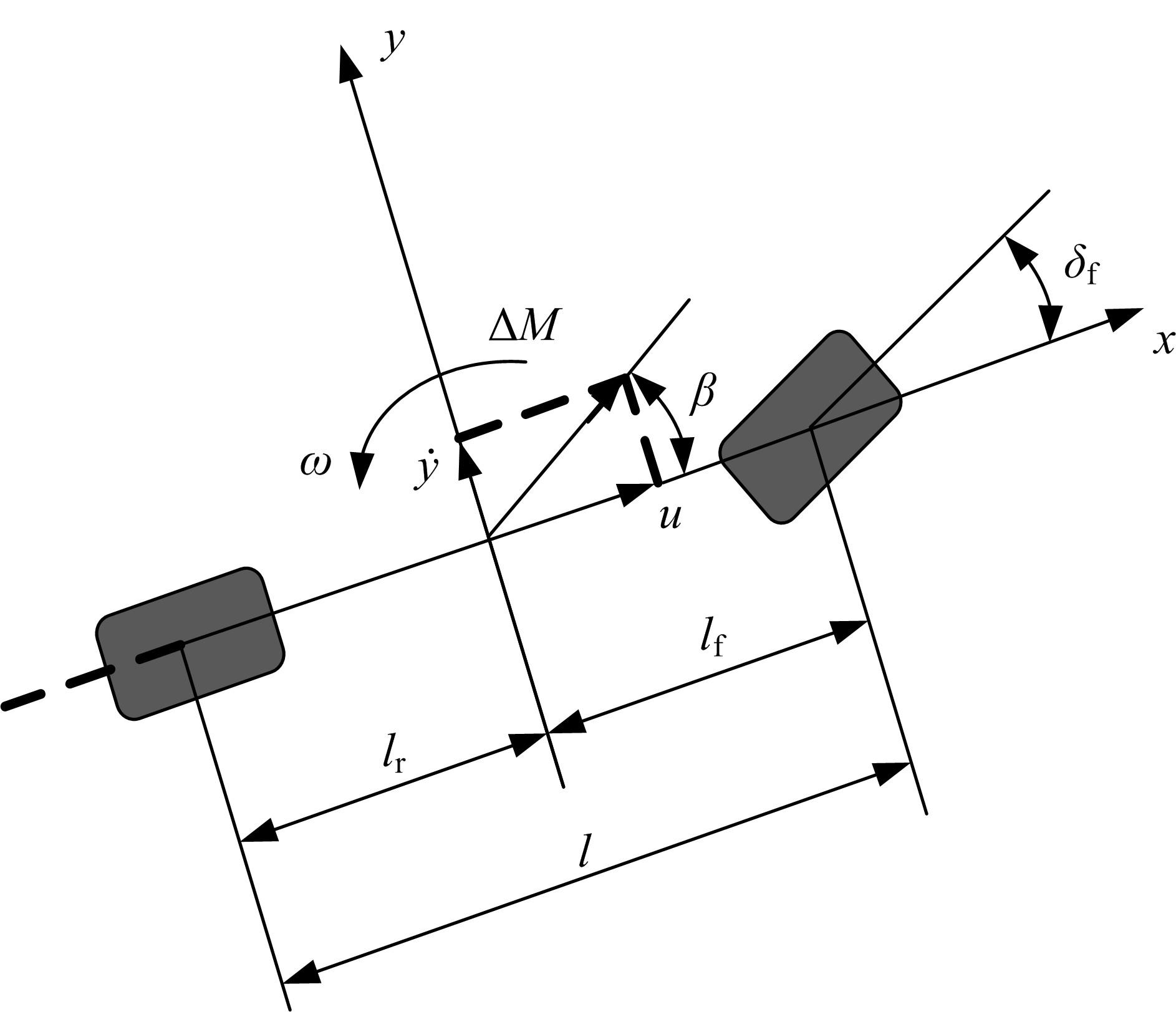
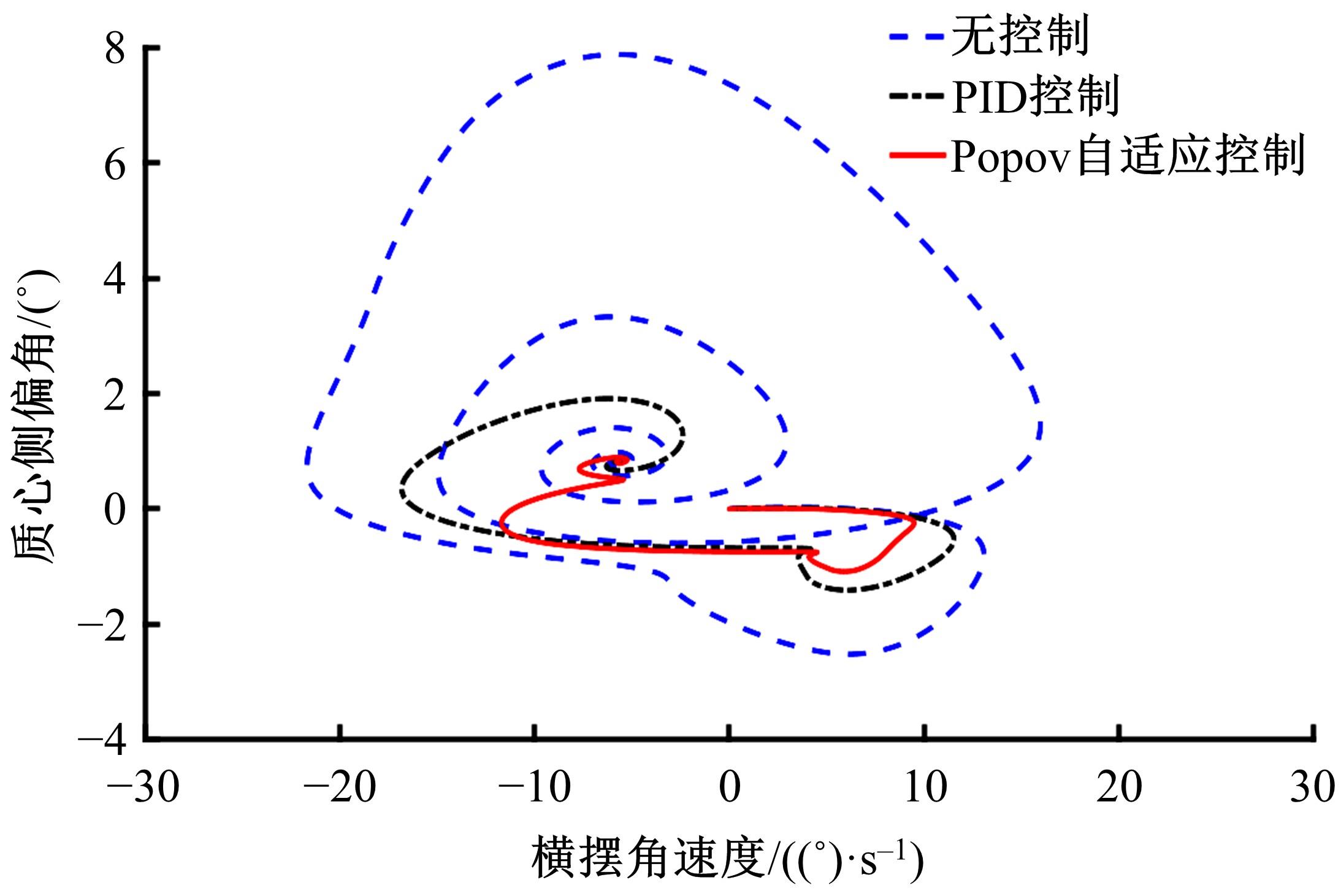
针对目前分布式电动汽车稳定性控制的实时性和自适应性较差的缺点,采用分层式控制结构提出了一种模型参考自适应稳定性控制策略。上层为基于Popov超稳定性的模型参考自适应横摆力矩控制器,通过求解Popov积分不等式得到自适应的前馈及反馈增益,具有计算负荷小、自适应性强等优势,同时能保证控制器的超稳定性要求。下层为基于二次规划的车轮转矩分配控制器,通过有效集法求解加权最小二乘规划问题,实现车轮转矩的动态分配。选取低附着系数的鱼钩工况,在CarSim/Simulink联合仿真平台上对控制策略进行验证。结果表明,本文控制策略与无控制相比,横摆角速度和质心侧偏角的峰值分别减少了44.81%和88.68%;与PID稳定性控制相比,二者的峰值分别减少了30.48%和55.72%。本文提出的稳定性控制策略能够大幅改善汽车的操稳性能,增加汽车在极限工况下的稳定性。
中图分类号:
- U461.6
















| 1 | 张细政, 郑亮. 基于转矩协调分配的分布式驱动电动汽车稳定性控制[J]. 中国机械工程, 2018, 29(15): 1780-1787. |
| Zhang Xi-zheng, Zheng Liang. Stability control of distributed drive electric vehicle based on coordinated torque distribution[J]. China Mechanical Engineering, 2018, 29(15): 1780-1787. | |
| 2 | Hu Xaio, Wang Ping, Hu Yun-feng, et al. A stability-guaranteed and energy-conserving torque distribution strategy for electric vehicles under extreme conditions[J]. Applied Energy, 2019, 259: No. 114162. |
| 3 | Park G, Han K, Nam K, et al. Torque vectoring algorithm of electronic-four-wheel drive vehicles for enhancement of cornering performance[J]. IEEE Transactions on Vehicular Technology, 2020, 69(4): 3668-3679. |
| 4 | Ding Shi-hong, Liu Lu, Zheng Wei-xing. Sliding mode direct yaw-moment control design for in-wheel electric vehicles[J]. IEEE Transactions on Industrial Electronics, 2017, 64(8): 6752-6762. |
| 5 | 刘志强, 刘广. 分布式驱动电动汽车稳定性控制仿真与试验[J]. 汽车工程, 2019, 41(7): 792-799. |
| Liu Zhi-qiang, Liu Guang. Simulation and test of stability control for distributed drive electric vehicles[J]. Automotive Engineering, 2019, 41(7): 792-799. | |
| 6 | Zhao Bin, Xu Nan, Chen Hong, et al. Stability control of electric vehicles with in-wheel motors by considering tire slip energy[J]. Mechanical Systems and Signal Processing, 2019, 118: 340-359. |
| 7 | Dalboni M, Tavernini D, Montanaro U, et al. Nonlinear model predictive control for integrated energy-efficient torque-vectoring and anti-roll moment distribution[J]. IEEE/ASME Transactions on Mechatronics, 2021, 26(3): 1212-1224. |
| 8 | Deng Hui-fan, Zhao You-qun, Feng Shi-lin, et al. Torque vectoring algorithm based on mechanical elastic electric wheels with consideration of the stability and economy[J]. Energy, 2021, 219: No. 119643. |
| 9 | Zhu Jun-jun, Wang Zhen-po, Zhang Lei, et al. Braking/steering coordination control for in-wheel motor drive electric vehicles based on nonlinear model predictive control[J]. Mechanism and Machine Theory, 2019, 142: No. 103586. |
| 10 | Wang Guo-dong, Liu Yang, Li Shao-song, et al. New integrated vehicle stability control of active front steering and electronic stability control considering tire force reserve capability[J]. IEEE Transactions on Vehicular Technology, 2021, 70(3): 2181-2195. |
| 11 | 林程, 曹放, 梁晟, 等. 双电机后驱车辆操纵稳定性分层混杂模型预测控制[J]. 机械工程学报, 2019, 55(22): 123-130. |
| Lin Cheng, Chao Fang, Liang Sheng, et al. Yaw stability conrol of distributed drive electric vehicle based on hierarchical hybrid model predictive control[J]. Journal of Mechanical Engineering, 2019, 55(22): 123-130. | |
| 12 | Laghmara H, Doumiati M, Talj R, et al. Yaw moment Lyapunov based control for in-wheel-motor-drive electric vehicle[J]. IFAC-PapersOnLine, 2017, 50(1): 13828-13833. |
| 13 | 柴天佑, 岳恒. 自适应控制[M], 北京: 清华大学出版社, 2016. |
| 14 | Popov V M. Hyperstability of control systems[J]. Journal of Dynamic Systems Measurement & Control, 1974, 96(3): 372-384. |
| 15 | 丁海涛, 郭孔辉, 陈虹. 汽车稳定性控制中横摆力矩决策的LQR方法[J]. 吉林大学学报: 工学版, 2010, 40(3): 597-601. |
| Ding Hai-tao, Guo Kong-hui, Chen Hong. LQR method for vehicle yaw moment decision in vehicle stability control[J]. Journal of Jilin University (Engineering and Technology Edition), 2010, 40(3): 597-601. | |
| 16 | Yi K, Chung T, Kim J, et al. An investigation into differential braking strategies for vehicle stability control[J]. Proceedings of the Institution of Mechanical Engineers, 2003, 217(12): 1081-1903. |
| 17 | Tahami F, Kazemi R, Farhanghi S. A novel driver assist stability system for all-wheel-drive electric vehicles[J]. IEEE Transactions on Vehicular Technology, 2003, 52(3): 683-692. |
| 18 | Landau I D. Adaptive Control: the Model Reference Approach[M]. New York: Marcel Dekker, 1979. |
| 19 | 郭烈, 葛平淑, 孙大川, 等. 分布式驱动电动汽车紧急工况下稳定性控制[J]. 华中科技大学学报: 自然科学版, 2020, 48(1): 60-65. |
| Guo Lie, Ge Ping-shu, Da-chuan Shun, et al. Stability control for distributed drive electric vehicle in critical conditions[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2020, 48(1): 60-65. | |
| 20 | Peng Hao-nan, Wang Wei-da, Xiang Chang-le, et al. Torque coordinated control of four in-wheel motor independent-drive vehicles with consideration of the safety and economy[J]. IEEE Transactions on Vehicular Technology, 2019, 68(10): 9604-9618. |
| [1] | 王克勇,鲍大同,周苏. 基于数据驱动的车用燃料电池故障在线自适应诊断算法[J]. 吉林大学学报(工学版), 2022, 52(9): 2107-2118. |
| [2] | 曹起铭,闵海涛,孙维毅,于远彬,蒋俊宇. 质子交换膜燃料电池低温启动水热平衡特性[J]. 吉林大学学报(工学版), 2022, 52(9): 2139-2146. |
| [3] | 隗海林,王泽钊,张家祯,刘洋. 基于Avl-Cruise的燃料电池汽车传动比及能量管理策略[J]. 吉林大学学报(工学版), 2022, 52(9): 2119-2129. |
| [4] | 刘岩,丁天威,王宇鹏,都京,赵洪辉. 基于自适应控制的燃料电池发动机热管理策略[J]. 吉林大学学报(工学版), 2022, 52(9): 2168-2174. |
| [5] | 李丞,景浩,胡广地,刘晓东,冯彪. 适用于质子交换膜燃料电池系统的高阶滑模观测器[J]. 吉林大学学报(工学版), 2022, 52(9): 2203-2212. |
| [6] | 张佩,王志伟,杜常清,颜伏伍,卢炽华. 车用质子交换膜燃料电池空气系统过氧比控制方法[J]. 吉林大学学报(工学版), 2022, 52(9): 1996-2003. |
| [7] | 池训逞,侯中军,魏伟,夏增刚,庄琳琳,郭荣. 基于模型的质子交换膜燃料电池系统阳极气体浓度估计技术综述[J]. 吉林大学学报(工学版), 2022, 52(9): 1957-1970. |
| [8] | 裴尧旺,陈凤祥,胡哲,翟双,裴冯来,张卫东,焦杰然. 基于自适应LQR控制的质子交换膜燃料电池热管理系统温度控制[J]. 吉林大学学报(工学版), 2022, 52(9): 2014-2024. |
| [9] | 胡广地,景浩,李丞,冯彪,刘晓东. 基于高阶燃料电池模型的多目标滑模控制[J]. 吉林大学学报(工学版), 2022, 52(9): 2182-2191. |
| [10] | 陈凤祥,伍琪,李元松,莫天德,李煜,黄李平,苏建红,张卫东. 2.5吨燃料电池混合动力叉车匹配、仿真及优化[J]. 吉林大学学报(工学版), 2022, 52(9): 2044-2054. |
| [11] | 武小花,余忠伟,朱张玲,高新梅. 燃料电池公交车模糊能量管理策略[J]. 吉林大学学报(工学版), 2022, 52(9): 2077-2084. |
| [12] | 高青,王浩东,刘玉彬,金石,陈宇. 动力电池应急冷却喷射模式实验分析[J]. 吉林大学学报(工学版), 2022, 52(8): 1733-1740. |
| [13] | 王奎洋,何仁. 基于支持向量机的制动意图识别方法[J]. 吉林大学学报(工学版), 2022, 52(8): 1770-1776. |
| [14] | 王骏骋,吕林峰,李剑敏,任洁雨. 分布驱动电动汽车电液复合制动最优滑模ABS控制[J]. 吉林大学学报(工学版), 2022, 52(8): 1751-1758. |
| [15] | 刘汉武,雷雨龙,阴晓峰,付尧,李兴忠. 增程式电动汽车增程器多点控制策略优化[J]. 吉林大学学报(工学版), 2022, 52(8): 1741-1750. |
|
||