吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (5): 1272-1281.doi: 10.13229/j.cnki.jdxbgxb.20210952
• 车辆工程·机械工程 • 上一篇
基于有限时间扩张状态观测的HEV鲁棒复合协调控制
汪少华1( ),储堃1,施德华1,2(),殷春芳3,李春4
),储堃1,施德华1,2(),殷春芳3,李春4
- 1.江苏大学 汽车工程研究院,江苏 镇江,212013
2.汽车零部件先进制造技术教育部重点实验室(重庆理工大学),重庆 400054
3.江苏大学 电气信息工程学院,江苏 镇江,212013
4.金龙联合汽车工业(苏州)有限公司,江苏 苏州 215026
Robust compound coordinated control of HEV based on finite⁃time extended state observation
Shao-hua WANG1(),Kun CHU1,De-hua SHI1,2(),Chun-fang YIN3,Chun LI4
- 1.Automotive Engineering Research Institute,Jiangsu University,Zhenjiang 212013,China
2.Key Laboratory of Advanced Manufacture Technology for Automobile Parts(Chongqing University of Technology),Ministry of Education,Chongqing 400054,China
3.School of Electrical and Information Engineering,Jiangsu University,Zhenjiang 212013,China
4.Higer Bus Company Limited,Suzhou 215026,China
摘要:
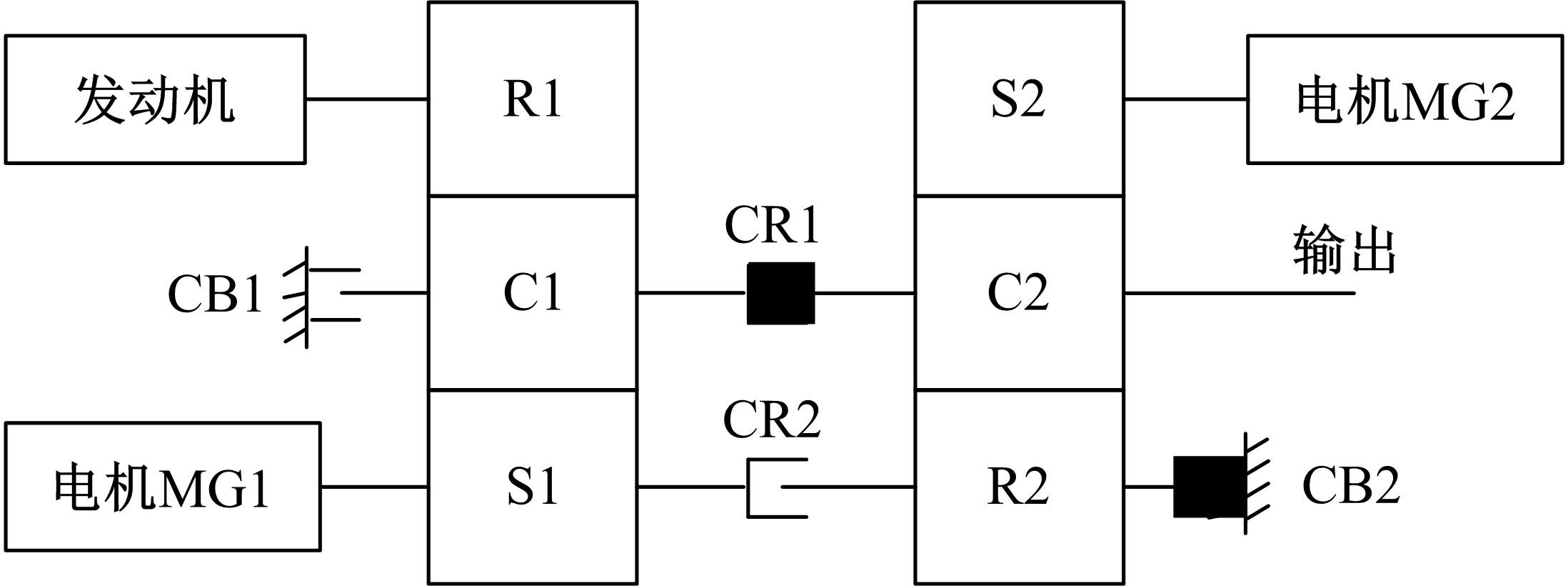
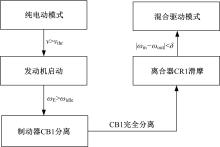
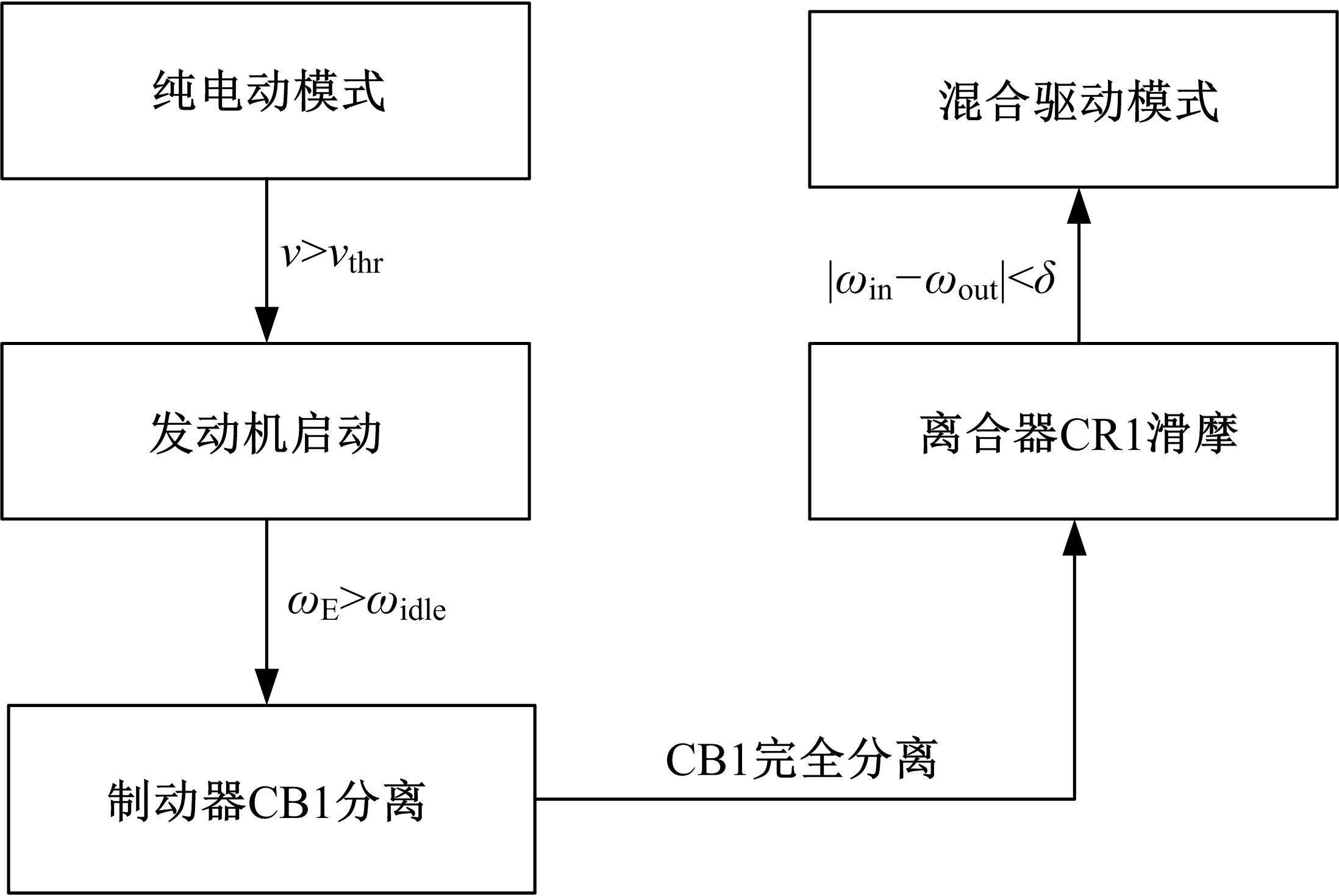
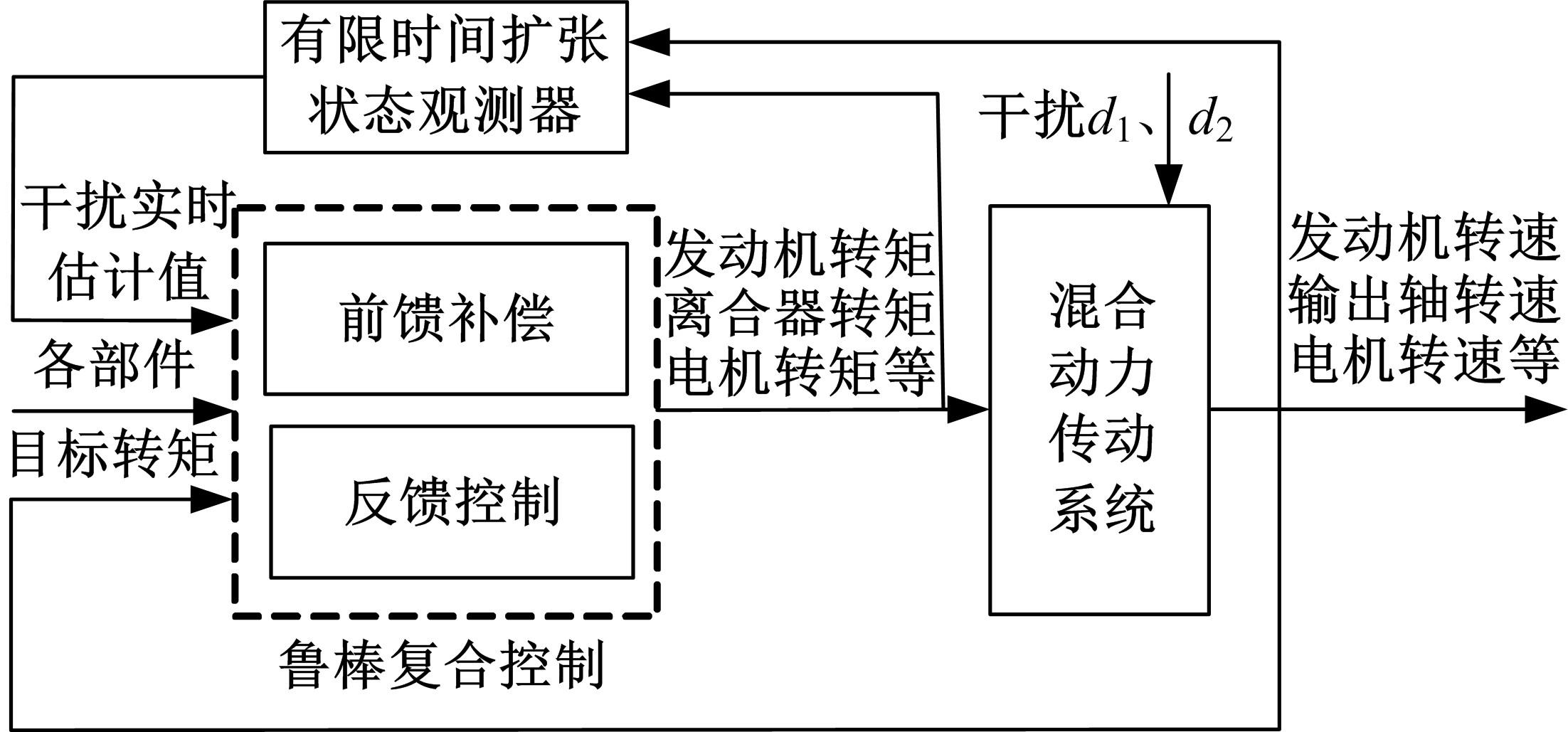
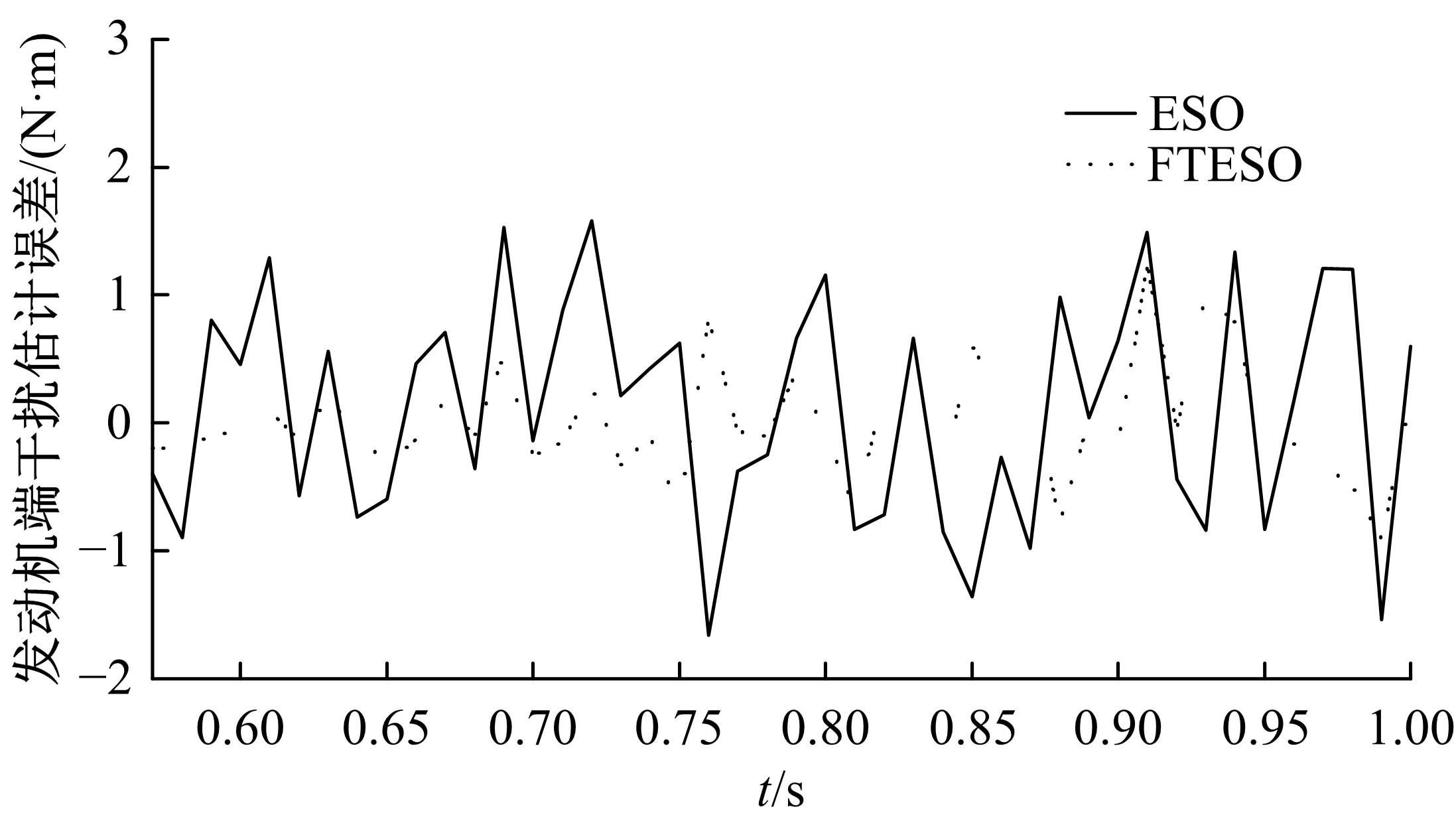
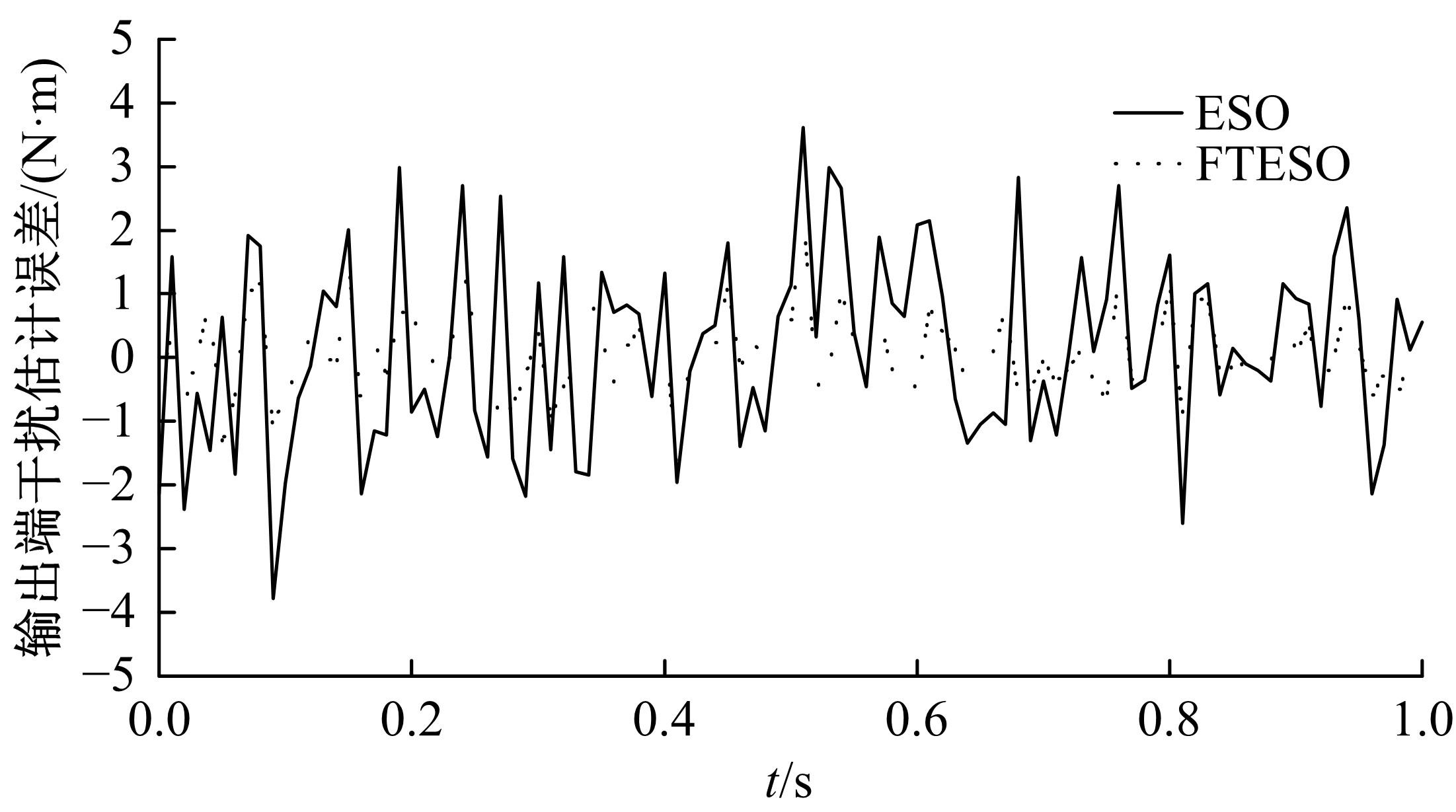
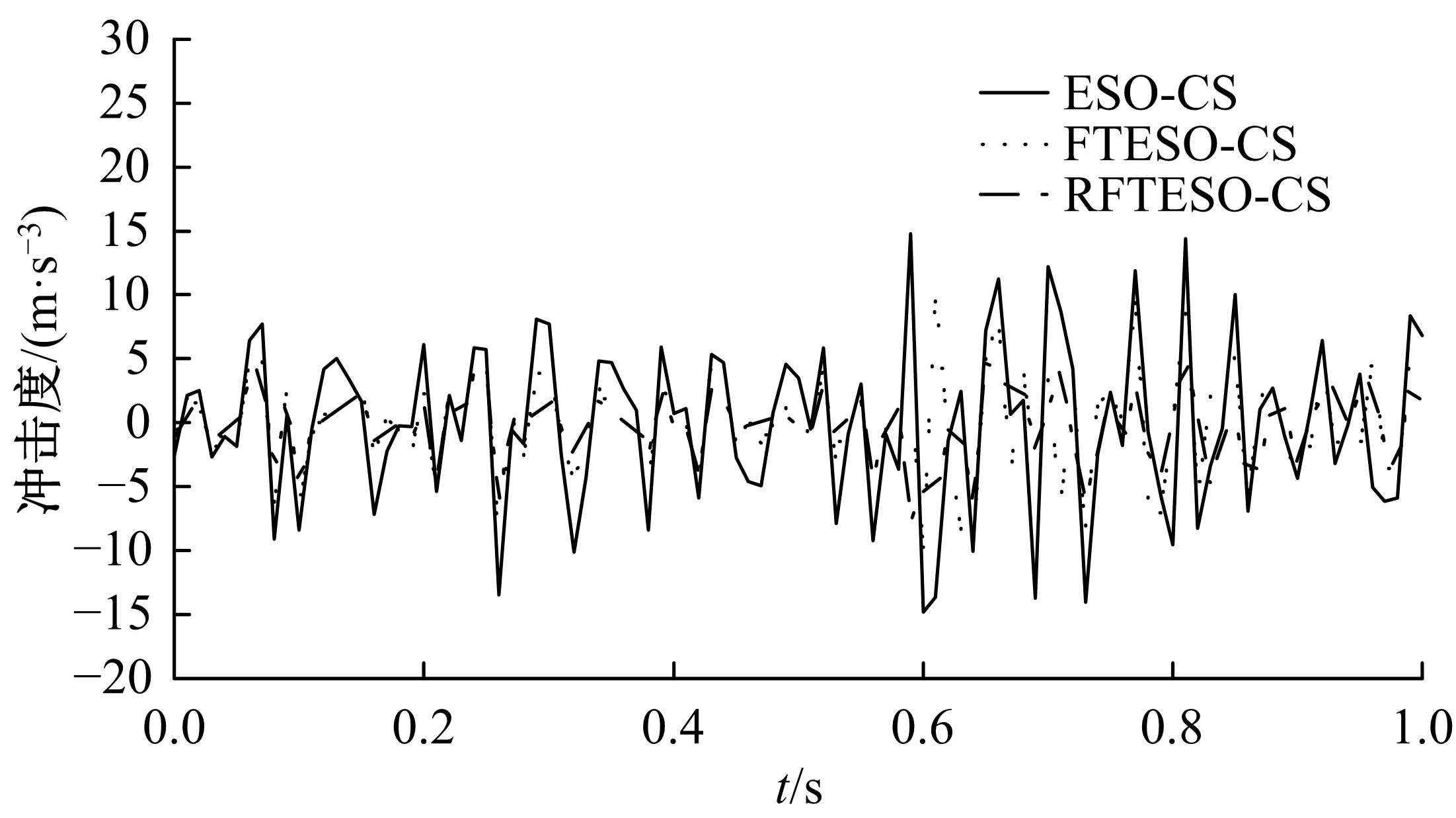
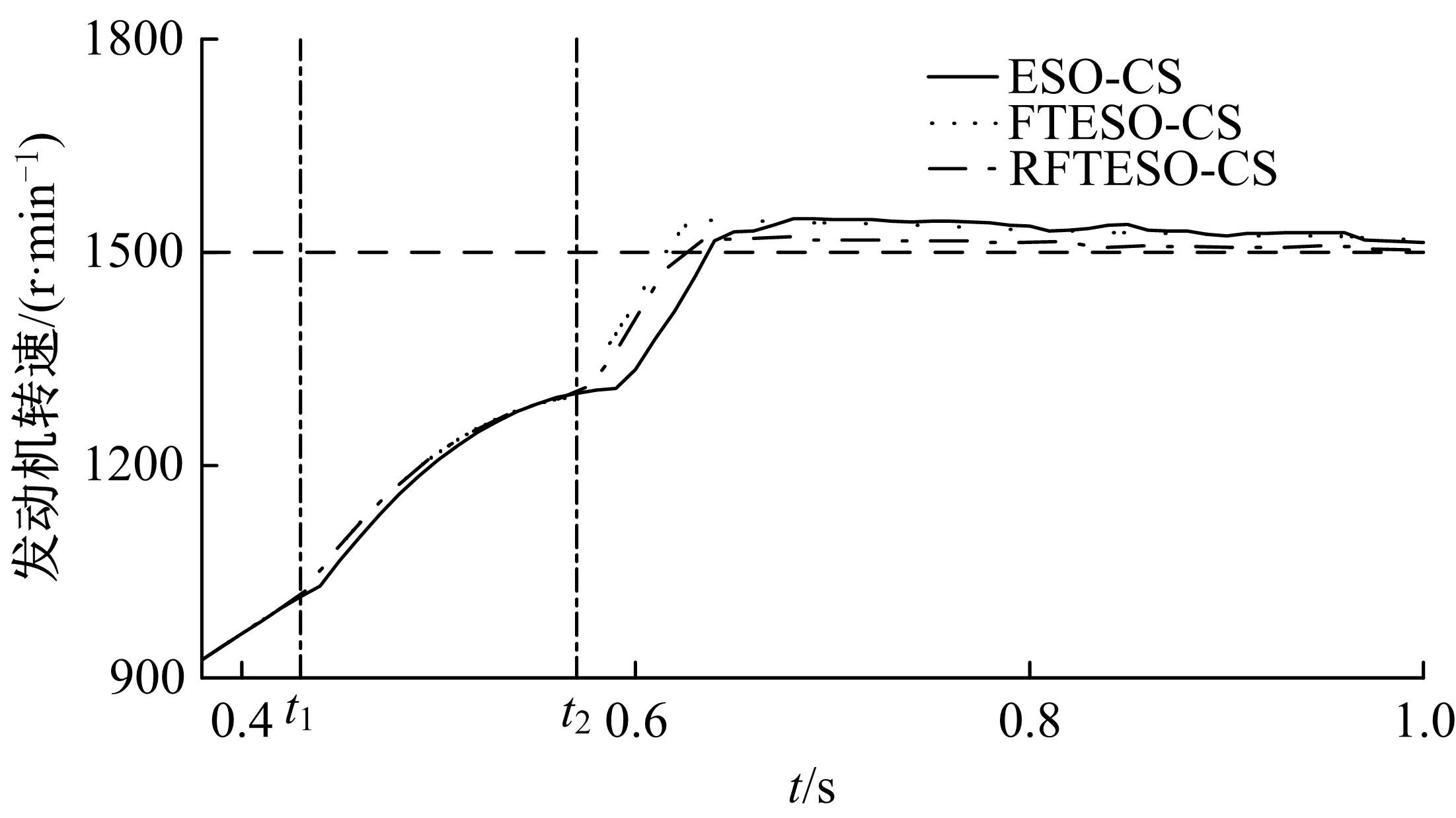
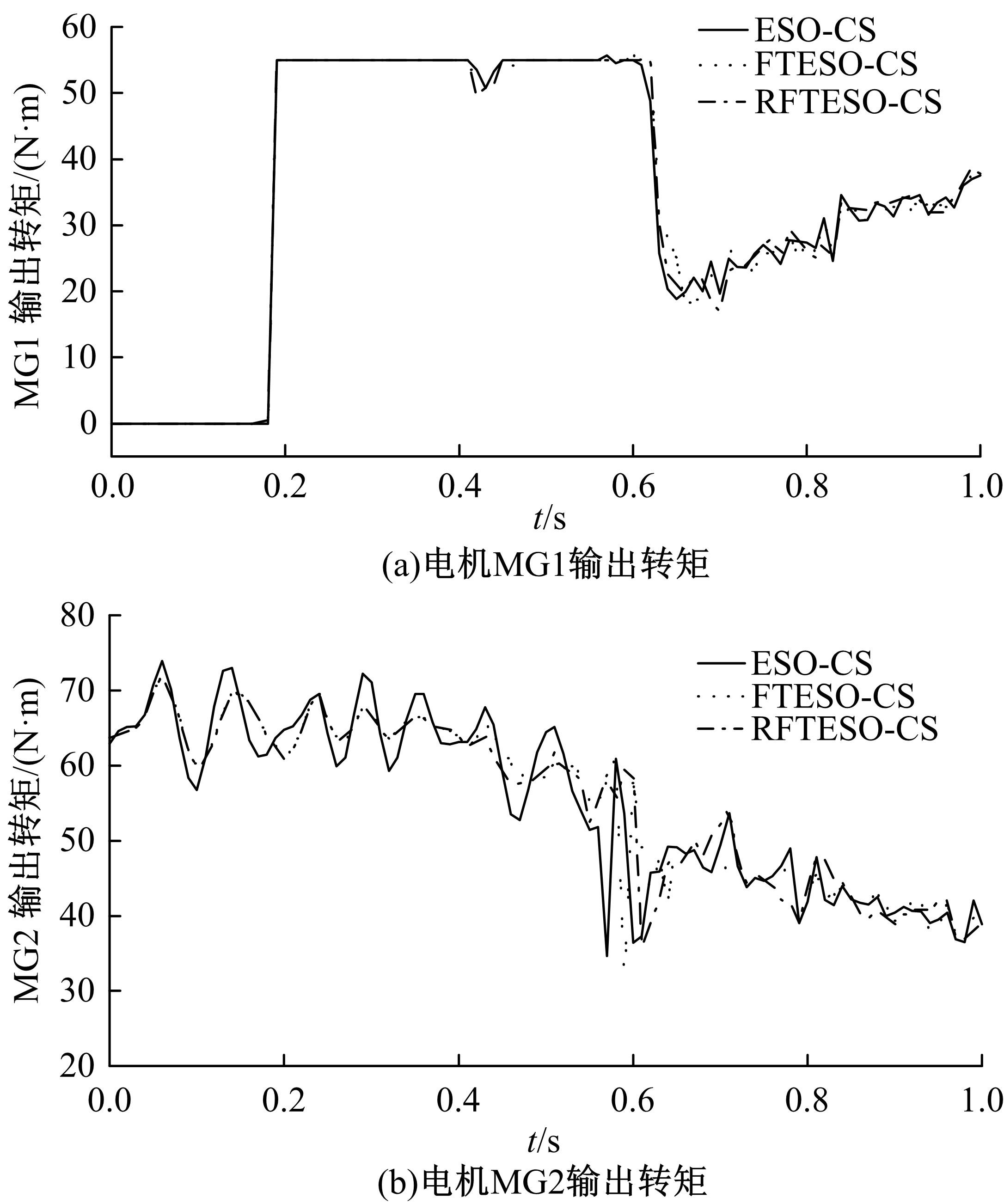
针对采用双行星排动力耦合机构的混合动力汽车(HEV),研究其纯电动模式至混合动力驱动模式切换过程,为减小由发动机转矩波动和行驶工况扰动导致的模式切换动态性能恶化,提出了基于有限时间扩张状态观测的鲁棒复合协调控制策略。分析模式切换过程并建立各切换阶段的系统动力学模型,针对造成模式切换冲击的切换阶段,设计基于有限时间稳定理论的扩张状态观测器估计发动机转矩和负载转矩扰动,在此基础上,构建基于观测状态的前馈补偿策略,并设计基于状态反馈的鲁棒H∞控制器,从而实现模式切换过程的鲁棒复合协调控制。仿真结果表明:有限时间扩张状态观测器有效提高了对发动机和负载转矩扰动的观测精度,优化了发动机转速的控制效果,基于有限时间扩张状态观测的鲁棒复合协调控制策略可有效克服车辆外界扰动的影响,显著减小HEV模式切换过程的冲击度。
中图分类号:
- U463.2




| 1 | 胡云峰, 麻宝林, 林佳眉, 等.混合动力汽车的发动机最优运行曲线在线优化方法[J].吉林大学学报: 工学版, 2022, 52(7): 1679-1686. |
| Hu Yun-feng, Ma Bao-lin, Lin Jia-mei, et al. Online optimization method of hybrid electric vehicle's engine optimal operating line[J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(7): 1679-1686. | |
| 2 | Geetha A, Subramani C. A comprehensive review on energy management strategies of hybrid energy storage system for electric vehicles[J]. International Journal of Energy Research, 2017, 41(13): 1817-1834. |
| 3 | Zhu F T, Chen L, Yin C L, et al. Dynamic modelling and systematic control during the mode transition for a multi-mode hybrid electric vehicle[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2013, 227(7): 1007-1023. |
| 4 | Lin Y, Qin D, Liu Y, et al. Control strategy for all the mode-switches of hybrid electric vehicle[J]. Advances in Mechanical Engineering, 2016, 8(11): 1731-1747. |
| 5 | 王庆年, 冀尔聪, 王伟华, 等.并联混合动力汽车模式切换过程的协调控制[J].吉林大学学报: 工学版, 2008, 38(1): 1-6. |
| Wang Qing-nian, Ji Er-cong, Wang Wei-hua, et al. Coordinated control for mode-switch of parallel hybrid electric vehicle[J]. Journal of Jilin University(Engineering and Techology Edition), 2008, 38(1): 1-6. | |
| 6 | 赵治国, 代显军, 王晨, 等.复合功率分流混合电动轿车驱动模式切换的协调控制[J].汽车工程, 2015, 37(3): 260-265. |
| Zhao Zhi-guo, Dai Xian-jun, Wang Chen, et al. Coordinated control of driving mode switching of compound power-split hybrid electric car[J]. Journal of Automobile Engineering, 2015, 37(3): 260-265. | |
| 7 | Oh J, Choi S B, Chang Y J, et al. Engine clutch torque estimation for parallel-type hybrid electric vehicles[J]. International Journal of Automotive Technology, 2017, 18(1): 125-135. |
| 8 | Elzaghir W, Zhang Y, Natarajan N, et al. Model reference adaptive control for hybrid electric vehicle with dual clutch transmission configurations[J]. IEEE Transactions on Vehicular Technology, 2018, 67(2): 991-999. |
| 9 | 王永强, 付主木, 宋书中, 等.并联混合动力汽车模式切换快速终端滑模控制[J].河南科技大学学报: 自然科学版, 2020, 41(5): 18-25. |
| Wang Yong-qiang, Fu Zhu-mu, Song Shu-zhong, et al. Mode switching fast terminal sliding mode control for parallel hybrid electric vehicle[J]. Journal of Henan University of Science and Technology(Natural Science Edition), 2020, 41(5): 18-25. | |
| 10 | 汪佳佳, 蔡英凤, 陈龙, 等.基于扩张状态观测器估计的混合动力汽车协调控制[J].浙江大学学报: 工学版, 2021, 55(7): 1225-1233. |
| Wang Jia-jia, Cai Ying-feng, Chen Long, et al. Research on mode switching compensation control of hybrid electric vehicle based on extended state observer estimation[J]. Journal of Zhejiang University(Engineering Edition), 2021, 55(7): 1225-1233. | |
| 11 | Du H B, Li S H. Finite-time attitude stabilization for a spacecraft using homogeneous method[J]. Journal of Guidance, Control and Dynamics, 2012, 35(3): 740-748. |
| 12 | Bhat S P, Bemstein D S. Finite-time stability of continuous autonomous systems[J]. SIAM Journal on Control Optimization, 2000, 38(3): 751-766. |
| 13 | Shi D H, Pisa P, Chen L, et al. Control design and fuel economy investigation of power split HEV with energy regeneration of suspension[J]. Applied Energy, 2016, 182: 576-589. |
| 14 | Flávio A F, Edvaldo A, Marcelo C M T, et al. Robust state-derivative feedback LMI-based designs for linear descriptor systems[J]. Mathematical Problems in Engineering, 2009, 2010: 1-15. |
| 15 | 刘凯, 杨冬梅.参数不确定离散广义系统的H2/H∞优化控制[J].吉林大学学报: 理学版, 2012, 50(2): 237-243. |
| Liu Kai, Yang Dong-mei. H2/H∞ optimal control for discrete singular systems with parameter uncertainties[J]. Journal of Jilin University(Science Edition), 2012, 50(2): 237-243. |
| [1] | 陈磊,王杨,董志圣,宋亚奇. 一种基于转向意图的车辆敏捷性控制策略[J]. 吉林大学学报(工学版), 2023, 53(5): 1257-1263. |
| [2] | 陈小波,陈玲. 定位噪声统计特性未知的变分贝叶斯协同目标跟踪[J]. 吉林大学学报(工学版), 2023, 53(4): 1030-1039. |
| [3] | 赵睿,李云,胡宏宇,高镇海. 基于V2I通信的交叉口车辆碰撞预警方法[J]. 吉林大学学报(工学版), 2023, 53(4): 1019-1029. |
| [4] | 杨红波,史文库,陈志勇,郭年程,赵燕燕. 基于NSGA⁃II的斜齿轮宏观参数多目标优化[J]. 吉林大学学报(工学版), 2023, 53(4): 1007-1018. |
| [5] | 何科,丁海涛,许男,郭孔辉. 基于摄像头和车道线的增强定位系统[J]. 吉林大学学报(工学版), 2023, 53(3): 663-673. |
| [6] | 朱冰,范天昕,赵健,张培兴,孙宇航. 基于危险边界搜索的自动驾驶系统加速测试方法[J]. 吉林大学学报(工学版), 2023, 53(3): 704-712. |
| [7] | 田彦涛,季言实,唱寰,谢波. 深度强化学习智能驾驶汽车增广决策模型[J]. 吉林大学学报(工学版), 2023, 53(3): 682-692. |
| [8] | 何德峰,周丹,罗捷. 跟随式车辆队列高效协同弦稳定预测控制[J]. 吉林大学学报(工学版), 2023, 53(3): 726-734. |
| [9] | 张建,刘金波,高原,刘梦可,高振海,杨彬. 基于多模交互的车载传感器定位算法[J]. 吉林大学学报(工学版), 2023, 53(3): 772-780. |
| [10] | 何科,丁海涛,赖宣淇,许男,郭孔辉. 基于Transformer的轮式里程计误差预测模型[J]. 吉林大学学报(工学版), 2023, 53(3): 653-662. |
| [11] | 刘嫣然,孟庆瑜,郭洪艳,李嘉霖. 图注意力模式下融合高精地图的周车轨迹预测[J]. 吉林大学学报(工学版), 2023, 53(3): 792-801. |
| [12] | 谢波,高榕,许富强,田彦涛. 低附着路况条件下人车共享转向系统稳定控制[J]. 吉林大学学报(工学版), 2023, 53(3): 713-725. |
| [13] | 田彦涛,许富强,王凯歌,郝子绪. 考虑周车信息的自车期望轨迹预测[J]. 吉林大学学报(工学版), 2023, 53(3): 674-681. |
| [14] | 高松,王玉琼,王玉海,徐艺,周英超,王鹏伟. 智能汽车纵横向整体反馈线性化控制[J]. 吉林大学学报(工学版), 2023, 53(3): 735-745. |
| [15] | 王登峰,陈宏利,那景新,陈鑫. 单双搭接接头经高温老化后的失效对比[J]. 吉林大学学报(工学版), 2023, 53(2): 346-354. |
|
||