吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (3): 963-973.doi: 10.13229/j.cnki.jdxbgxb.20230584
局部多车影响下跟驰行为机理及建模
张兰芳( ),李根泽,刘婷宇,余博()
),李根泽,刘婷宇,余博()
- 同济大学 道路与交通工程教育部重点实验室,上海 201804
Mechanism and modeling of car⁃following behavior under local multi⁃vehicle influence
Lan-fang ZHANG(),Gen-ze LI,Ting-yu LIU,Bo YU()
- The Key Laboratory of Road and Traffic Engineering,Ministry of Education,Tongji University,Shanghai 201804,China
摘要:
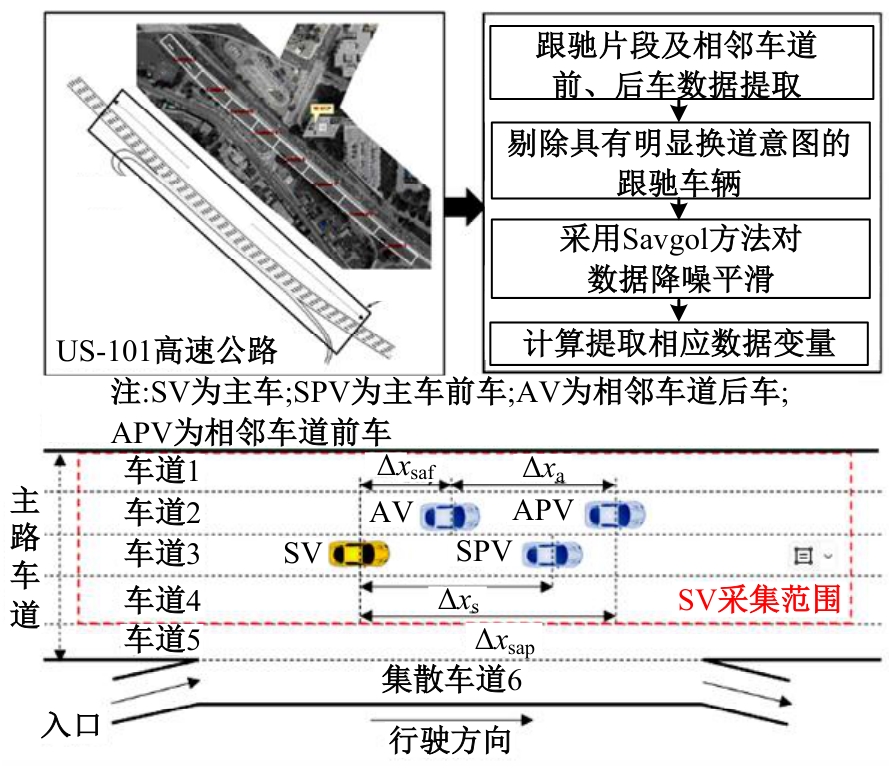
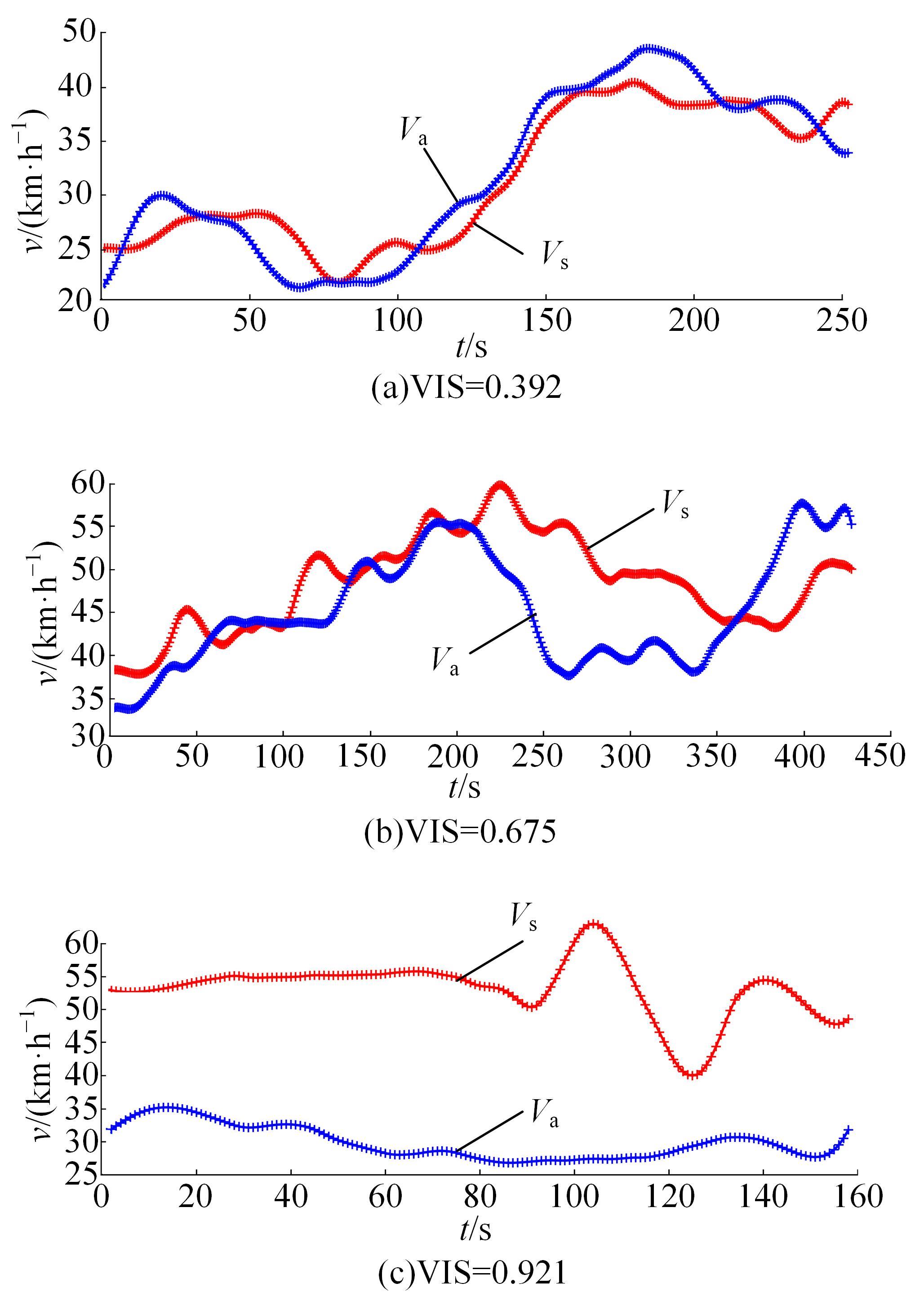
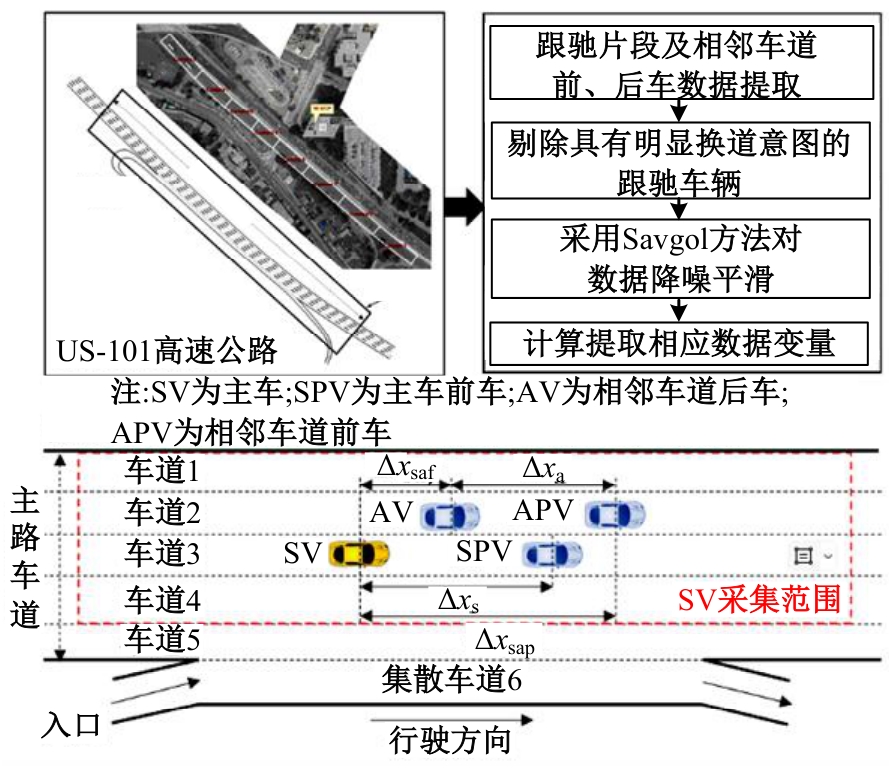
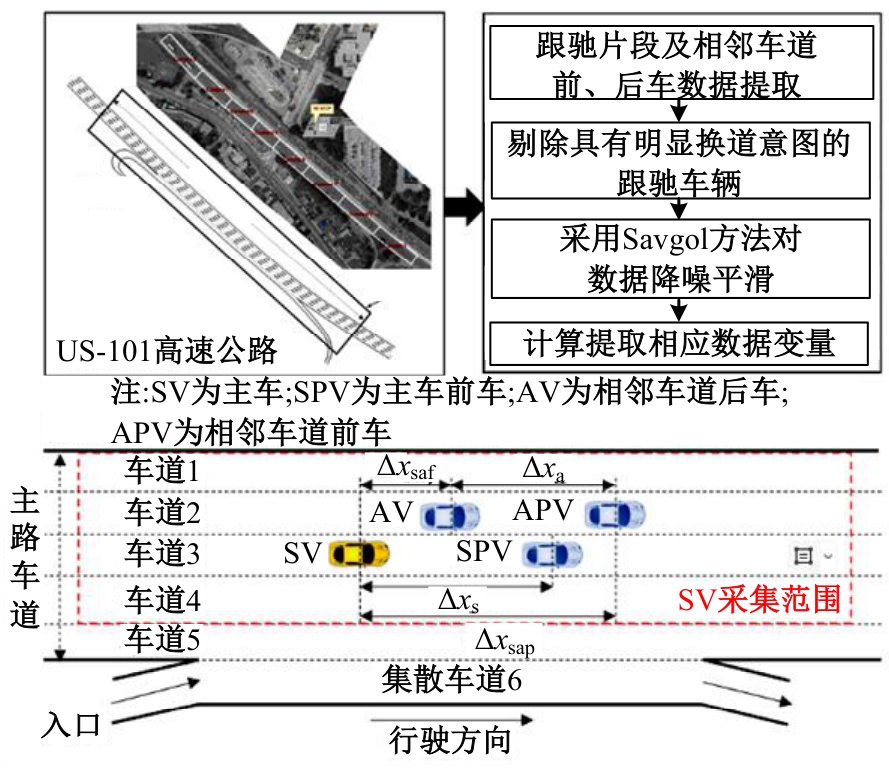
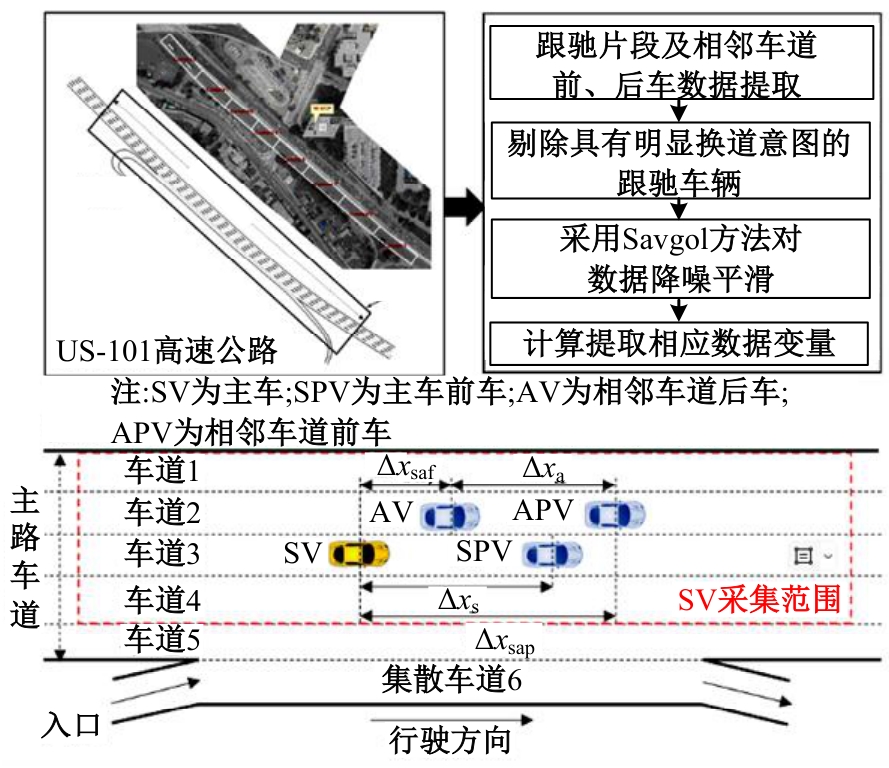
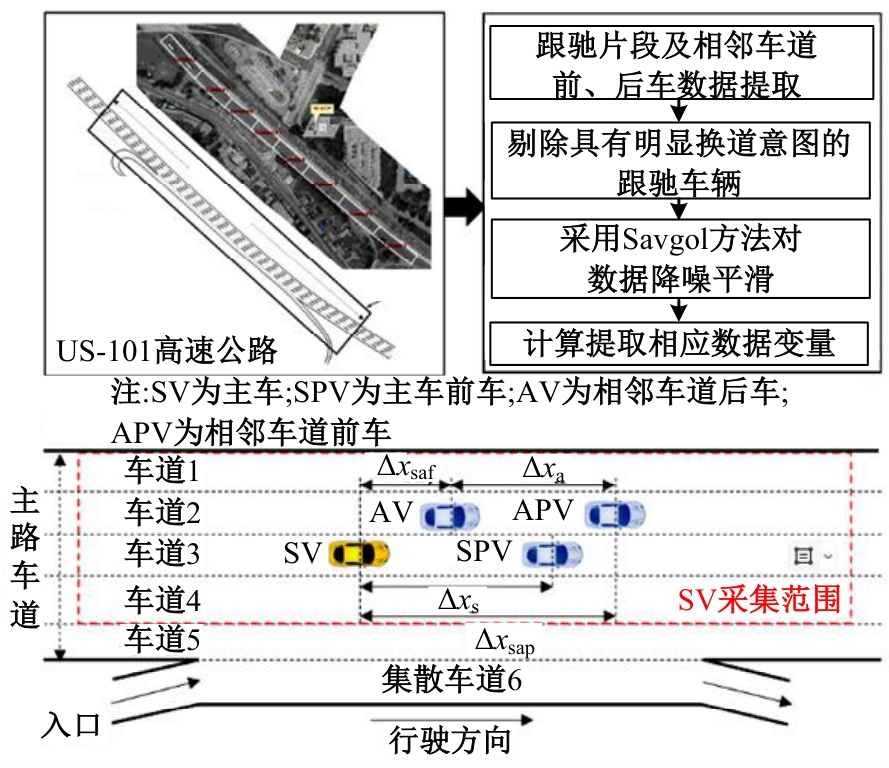
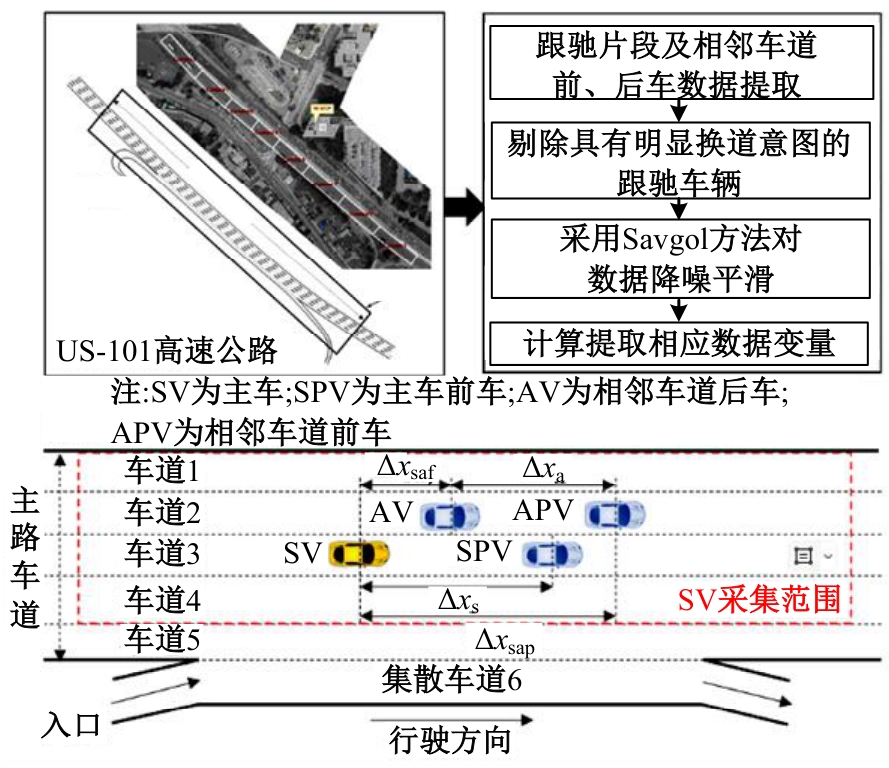
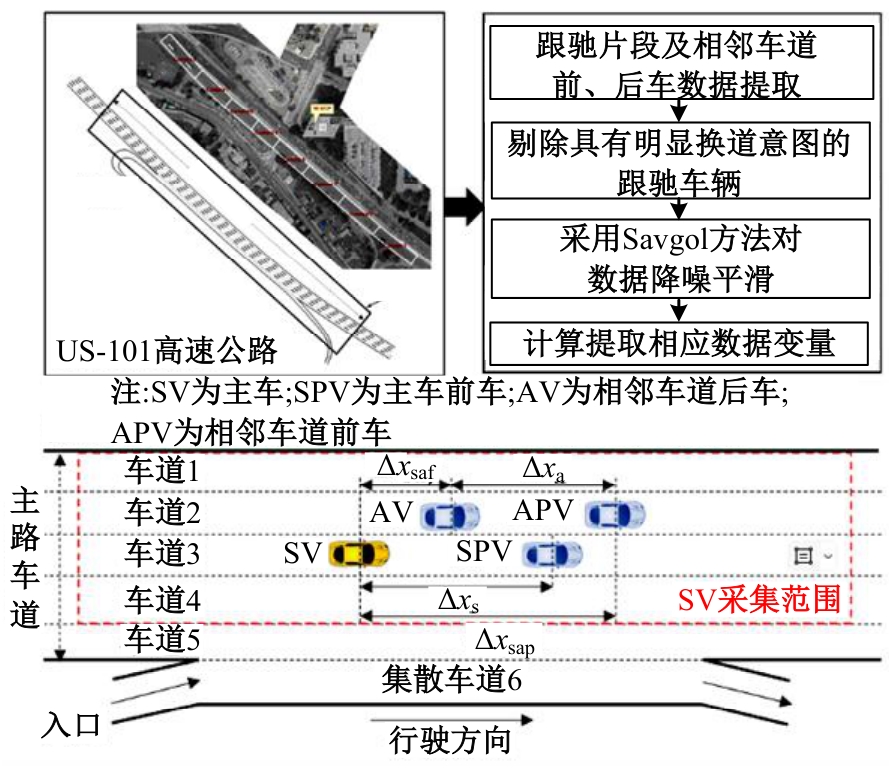
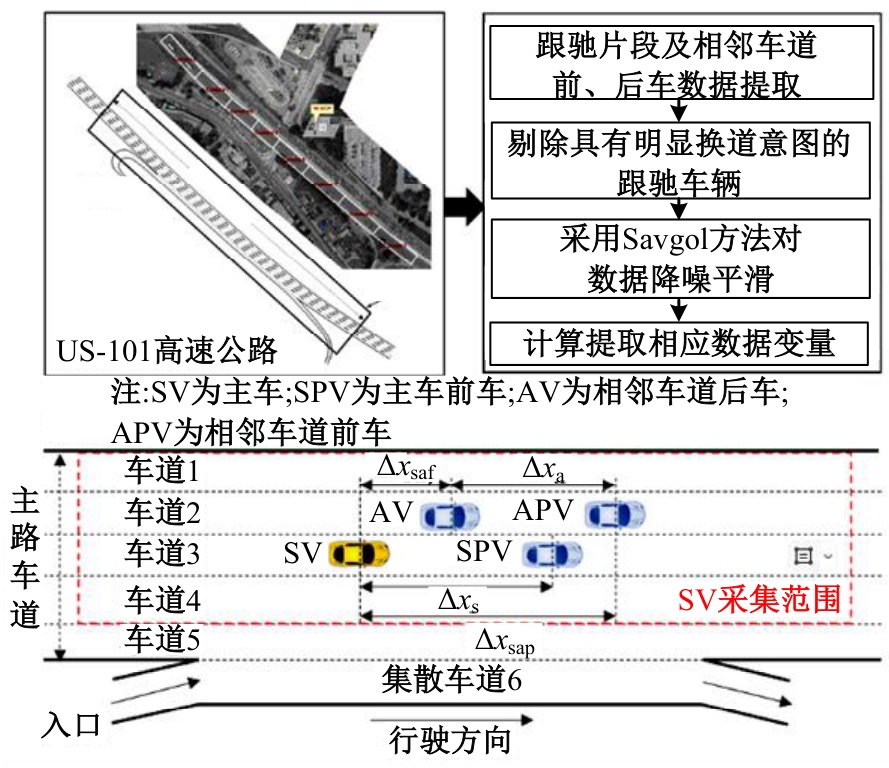
针对单一维度跟驰模型描述局部多车环境下车辆跟驰行为的局限性,对相邻车道车辆影响主车跟驰行为的机理进行探究,并试图建立更适合局部多车环境的车辆跟驰模型。通过相关性分析确定反映相邻车道车辆影响的驾驶行为变量,采用Vortisch相似度指标表征相邻车道车辆对跟驰行为的影响,利用卡方独立检验及核密度曲线确定影响是否显著的相似度分界阈值,通过递归特征消除法对受相邻车道车辆显著影响的跟驰样本相关变量进行筛选,并根据统计分析结果判断变量影响机理。基于该机理,在经典跟驰模型全速度差模型(Full velocity difference model,FVD)和智能驾驶模型(Intelligent driver model,IDM)的基础上构建了适合局部多车环境的跟驰模型并对比评价了其预测效果。结果表明:主车速度与相邻车道后车速度的Vortisch相似度指标可以有效表征相邻车道车辆对主车跟驰行为的影响,且分界阈值为0.668,并判断注意力机制-记忆效应可以解释局部多车对跟驰行为的影响机理。考虑注意力机制-记忆效应后,FVD模型和IDM模型的RMSE分别降低了65%、62%;MAE分别降低了65%、59%;R2分别提高了180%、288%,证明了注意力机制-记忆效应解释局部多车环境下主车跟驰行为的合理性。
中图分类号:
- U491.2


| 1 | Chen J, Zhao C, Jiang S C, et al. Safe, efficient, and comfortable autonomous driving based on cooperative vehicle infrastructure system[J]. International Journal of Environmental Research and Public Health, 2023, 20(1): No. 893. |
| 2 | Wang L, Horn B K P. On the stability analysis of mixed traffic with vehicles under car-following and bilateral control[J]. IEEE Transactions on Automatic Control, 2020, 65(7): 3076-3083. |
| 3 | 杨龙海, 张春, 仇晓赟, 等. 车辆跟驰模型研究进展[J]. 交通运输工程学报, 2019, 19(5): 125-138. |
| Yang Long-hai, Zhang Chun, Qiu Xiao-yun, et al. Research progress on car-following models[J]. Journal of Traffic and Transportation Engineering, 2019, 19(5): 125-138. | |
| 4 | 陈漩, 高自友, 赵小梅, 等. 反馈控制双车道跟驰模型研究[J]. 物理学报, 2007, 56(4): 2024-2029. |
| Chen Xuan, Gao Zi-you, Zhao Xiao-mei, et al. Study on the two-lane feedback controled car-following model[J]. Acta Physica Sinica, 2007, 56(4): 2024-2029. | |
| 5 | 杜文举, 李引珍, 俞建宁. 基于驾驶人特性的双车道跟驰模型稳定性分析[J]. 交通运输系统工程与信息, 2019, 19(5): 66-77, 93. |
| Du Wen-ju, Li Yin-zhen, Yu Jian-ning. Stability analysis of a two-lane car-following model with effect of driver' s characteristics[J]. Journal of Transportation Systems Engineering and Information Technology, 2019, 19(5): 66-77, 93. | |
| 6 | Jiang N, Yu B, Cao F, et al. An extended visual angle car-following model considering the vehicle types in the adjacent lane[J]. Physica A-Statistical Mechanics and Its Applications, 2021, 566:No.125665. |
| 7 | Balaji P, Benjamin C. Speed-spacing dependency on relative speed from the adjacent lane: new insights for car following models[J]. Transportation Research Part B-Methodological, 2016, 82: 74-90. |
| 8 | Eric P. Considerations about the quality assessment of travel time and travel distance distributions in transport modelling: a proposal for a standardized methodology[J]. Transportation, 2020, 48(3): 1285-1309. |
| 9 | 潘恒彦, 张文会, 梁婷婷, 等. 基于MIMIC与机器学习的出租车驾驶员交通事故诱因分析[J]. 吉林大学学报: 工学版, 2023, 53(2): 457-467. |
| Pan Heng-yan, Zhang Wen-hui, Liang Ting-ting, et al. Inducement analysis of taxi drivers' traffic accidents based on MIMIC and machine learning[J]. Journal of Jilin University (Engineering and Technology Edition), 2023, 53(2): 457-467. | |
| 10 | Yao H P, Liu C, Zhang P Y, et. al . Identification of encrypted traffic through attention mechanism based long short term memory[J]. IEEE Transactions on Big Data, 2022, 8(1): 241-252. |
| 11 | Treiber M, Helbing D. Memory effects in microscopic traffic models and wide scattering in flow-density data[J]. Physical Review E, 2003, 68(4):No.046119. |
| 12 | Vaswani A, Shazeer N, Parmar N, et al. Attention is all you need[C]∥31st Conference on Neural Information Processing Systems, Long Beach, USA, 2017: 5998-6008. |
| 13 | 李林恒, 甘婧, 曲栩, 等. 智能网联环境下基于安全势场理论的车辆跟驰模型[J]. 中国公路学报, 2019, 32(12): 76-87. |
| Li Lin-heng, Gan Jing, Qu Xu, et al. Car-following model based on safety potential field theory under connected and automated vehicle environment[J]. China Journal of Highway and Transport, 2019, 32(12): 76-87. |
| [1] | 刘照霞,付锐,牛世峰. 基于极值理论与智能网联信息的超车风险评估[J]. 吉林大学学报(工学版), 2025, 55(3): 925-937. |
| [2] | 李扬,李现国,苗长云,徐晟. 基于双分支通道先验和Retinex的低照度图像增强算法[J]. 吉林大学学报(工学版), 2025, 55(3): 1028-1036. |
| [3] | 潘义勇,尤逸文,吴静婷. 换道事故严重程度影响因素异质性和可转移性分析[J]. 吉林大学学报(工学版), 2025, 55(2): 520-528. |
| [4] | 刘元宁,臧子楠,张浩,刘震. 基于深度学习的核糖核酸二级结构预测方法[J]. 吉林大学学报(工学版), 2025, 55(1): 297-306. |
| [5] | 郭晓然,王铁君,闫悦. 基于局部注意力和本地远程监督的实体关系抽取方法[J]. 吉林大学学报(工学版), 2025, 55(1): 307-315. |
| [6] | 李路,宋均琦,朱明,谭鹤群,周玉凡,孙超奇,周铖钰. 基于RGHS图像增强和改进YOLOv5网络的黄颡鱼目标提取[J]. 吉林大学学报(工学版), 2024, 54(9): 2638-2645. |
| [7] | 王宏志,宋明轩,程超,解东旋. 基于改进YOLOv5算法的道路目标检测方法[J]. 吉林大学学报(工学版), 2024, 54(9): 2658-2667. |
| [8] | 余萍,赵康,曹洁. 基于优化A-BiLSTM的滚动轴承故障诊断[J]. 吉林大学学报(工学版), 2024, 54(8): 2156-2166. |
| [9] | 郭昕刚,程超,沈紫琪. 基于卷积网络注意力机制的人脸表情识别[J]. 吉林大学学报(工学版), 2024, 54(8): 2319-2328. |
| [10] | 孙铭会,薛浩,金玉波,曲卫东,秦贵和. 联合时空注意力的视频显著性预测[J]. 吉林大学学报(工学版), 2024, 54(6): 1767-1776. |
| [11] | 戢晓峰,徐迎豪,普永明,郝京京,覃文文. 山区双车道公路货车移动遮断小客车跟驰风险预测模型[J]. 吉林大学学报(工学版), 2024, 54(5): 1323-1331. |
| [12] | 高云龙,任明,吴川,高文. 基于注意力机制改进的无锚框舰船检测模型[J]. 吉林大学学报(工学版), 2024, 54(5): 1407-1416. |
| [13] | 邬岚,赵乐,李根. 基于方差异质性随机参数模型的汇合行为分析[J]. 吉林大学学报(工学版), 2024, 54(4): 883-889. |
| [14] | 王宏志,宋明轩,程超,解东旋. 基于改进YOLOv4-tiny算法的车距预警方法[J]. 吉林大学学报(工学版), 2024, 54(3): 741-748. |
| [15] | 李晓旭,安文娟,武继杰,李真,张珂,马占宇. 通道注意力双线性度量网络[J]. 吉林大学学报(工学版), 2024, 54(2): 524-532. |
|
||