吉林大学学报(工学版) ›› 2022, Vol. 52 ›› Issue (12): 2898-2905.doi: 10.13229/j.cnki.jdxbgxb20220017
基于卷积网络结构重参数化的车位状态检测算法
申铉京1( ),刘同壮1,王玉1,刘嘉伟2()
),刘同壮1,王玉1,刘嘉伟2()
- 1.吉林大学 计算机科学与技术学院,长春 130012
2.中国第一汽车集团进出口有限公司 人力资源部,长春 130119
Detection algorithm for parking space status based on convolution network structural re⁃parameterization
Xuan-jing SHEN1(),Tong-zhuang LIU1,Yu WANG1,Jia-wei LIU2()
- 1.College of Computer Science and Technology,Jilin University,Changchun 130012,China
2.Department of Human Resources,China Faw Group Import & Export Co. ,Ltd. ,Changchun 130119,China
摘要:
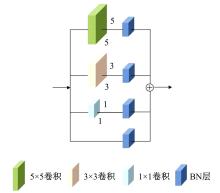
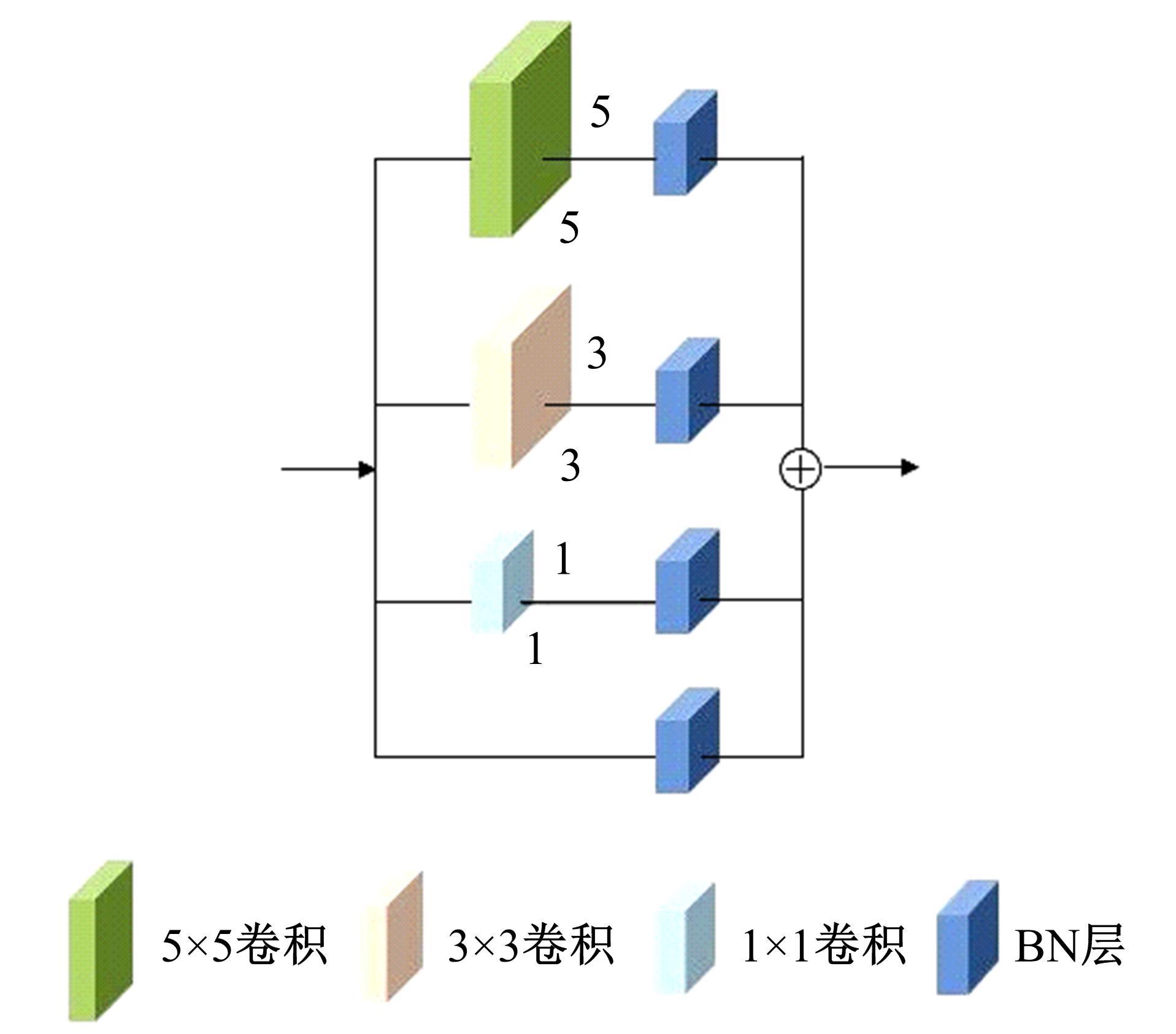
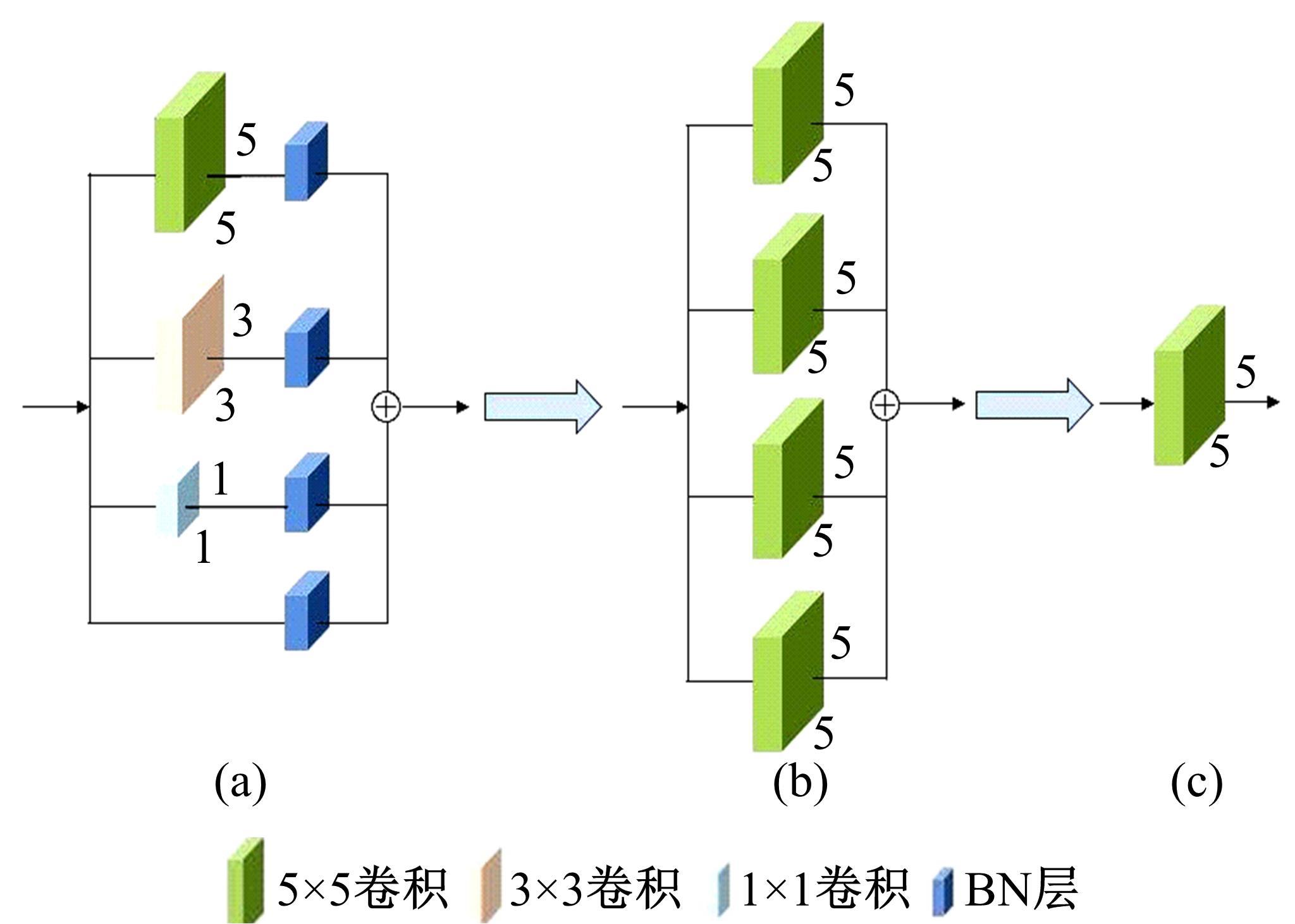
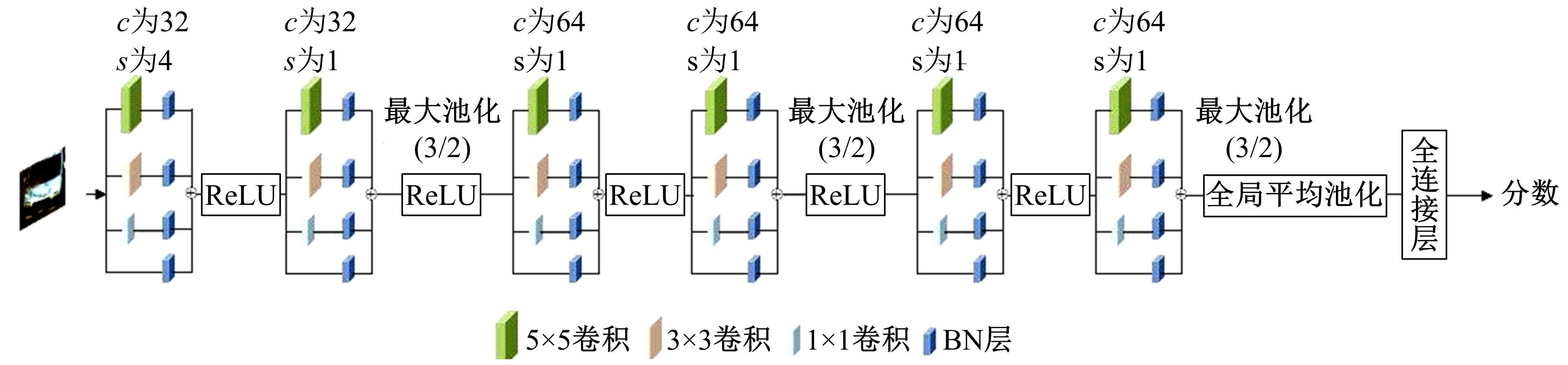
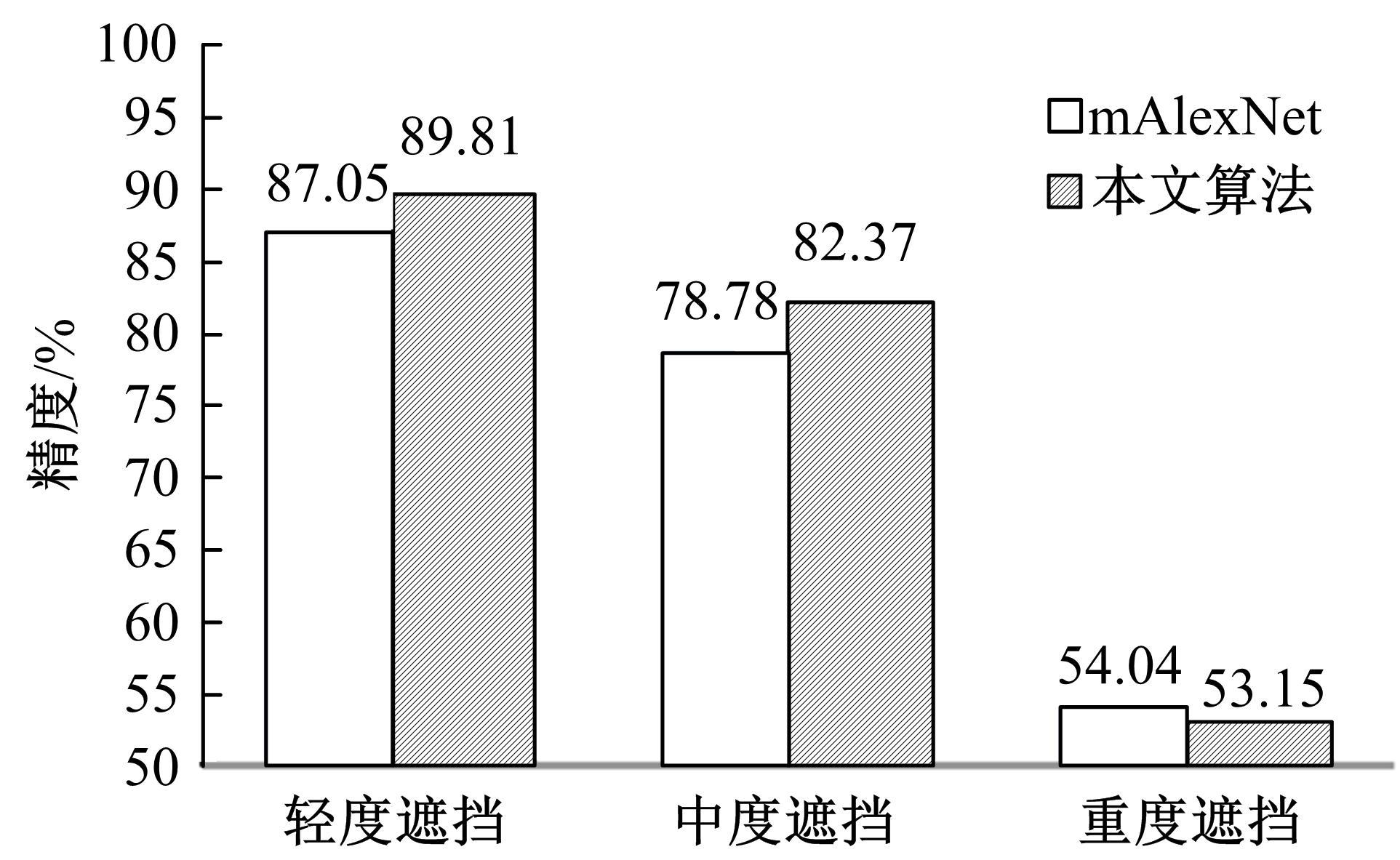
为解决停车位状态检测算法速度慢、精度低的问题,提出了一种基于卷积网络结构重参数化的车位状态检测算法。该算法利用结构重参数化解耦训练网络和推理网络。在训练时,利用不同尺度的小卷积核组成多分支结构,用于获取车位图像中局部细节特征,使网络达到较高的检测精度。训练完成后,利用结构重参数化将训练时多分支结构等价转化为单分支结构用于推理,显著提升了检测速度且不损失检测精度。实验结果表明,本文算法与其他车位状态检测算法相比,在预测精度和算法推理速度上都具有明显优势。
中图分类号:
- TP391








| 1 | Ichihashi H, Notsu A, Honda K, et al. Vacant parking space detector for outdoor parking lot by using surveillance camera and FCM classifier[C]∥2009 IEEE International Conference on Fuzzy Systems, Jeju, Korea, 2009: 127-134. |
| 2 | Tsai L W, Hsieh J W, Fan K C. Vehicle detection using normalized color and edge map[J]. IEEE transactions on Image Processing, 2007, 16(3): 850-864. |
| 3 | Huang C C, Tai Y S, Wang S J. Vacant parking space detection based on plane-based Bayesian hierarchical framework[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2013, 23(9): 1598-1610. |
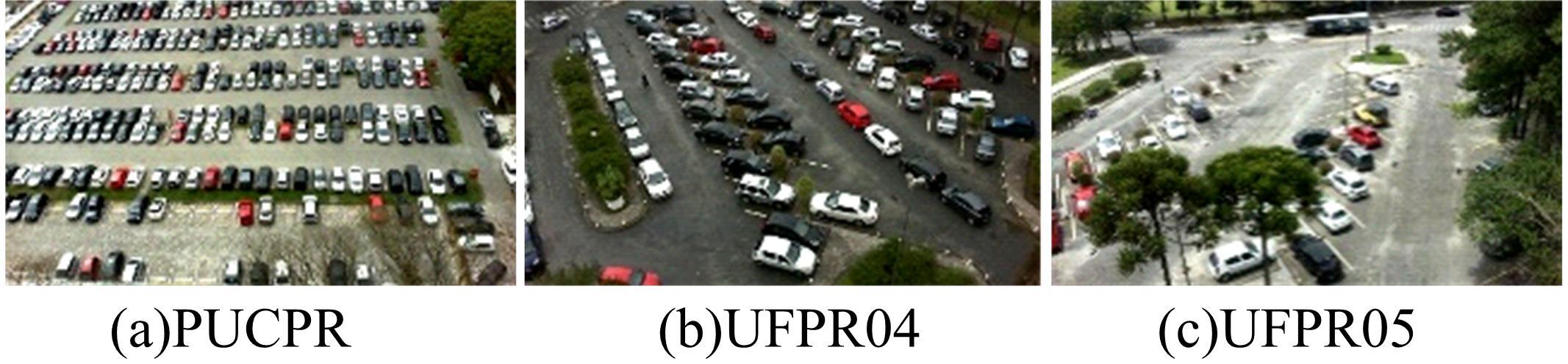
| 4 | de Almeida P R L, Oliveira L S, Britto Jr A S, et al. PKLot——a robust dataset for parking lot classification[J]. Expert Systems with Applications, 2015, 42(11): 4937-4949. |
| 5 | 刘日, 李建国, 王小农. 立体车库车位分配建模与仿真[J]. 江苏大学学报:自然科学版, 2018, 39(1):19-25. |
| Liu Ri, Li Jian-guo, Wang Xiao-nong. Modeling and simulation of parking space allocation in stereo garage[J]. Journal of Jiangsu University(Natural Science Edition), 2018, 39(1): 19-25. | |
| 6 | 于谦, 肖雄, 杨鸣鹏, 等. 基于车载排放测试驾驶行为对轻型汽油车排放的影响[J]. 江苏大学学报:自然科学版, 2022, 43(3):270-276. |
| Yu Qian, Xiao Xiong, Yang Ming-peng,et al. Driving behavior impact on emissions of light-duty gasoline vehicle based on portable emission measurement system[J]. Journal of Jiangsu University(Natural Science Edition), 2022, 43(3):270-276. | |
| 7 | LeCun Y, Bengio Y, Hinton G. Deep learning[J]. Nature, 2015, 521(7553): 436-444. |
| 8 | 申铉京, 沈哲, 黄永平, 等. 基于非局部操作的深度卷积神经网络车位占用检测算法[J]. 电子与信息学报, 2020, 42(9): 2269-2276. |
| Shen Xuan-jing, Shen Zhe, Huang Yong-ping, et al. Deep convolutional neural network for parking space occupancy detection based on non-local operation[J]. Journal of Electronics & Information Technology, 2020, 42(9): 2269-2276. | |
| 9 | Acharya D, Yan W, Khoshelham K. Real-time image-based parking occupancy detection using deep learning[C]∥Proceedings of the 5th Annual Research@Locate Conference, Adelaide, Australia, 2018: 33-40. |
| 10 | Amato G, Carrara F, Falchi F, et al. Deep learning for decentralized parking lot occupancy detection[J]. Expert Systems with Applications, 2017, 72: 327-334. |
| 11 | Amato G, Carrara F, Falchi F, et al. Car parking occupancy detection using smart camera networks and deep learning[C]∥2016 IEEE Symposium on Computers and Communication (ISCC), Messina, Italy, 2016: 1212-1217. |
| 12 | Ding Xiao-han, Zhang Xing-yu, Ma Ning-ning, et al. Repvgg: making VGG-style convnets great again[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021: 13733-13742. |
| 13 | 蔡英凤, 王海, 陈龙, 江浩斌. 采用视觉显著性和深度卷积网络的鲁棒视觉车辆识别算法[J]. 江苏大学学报:自然科学版, 2015, 36(3): 331-336. |
| Cai Ying-feng, Wang hai, Chen Long, Jiang Hao-bin. Robust vehicle recognition algorithm using visual saliency and deep convolutional neural networks[J]. Journal of Jiangsu University(Natural Science Edition), 2015, 36(3): 331-336. | |
| 14 | Ioffe S, Szegedy C. Batch normalization: accelerating deep network training by reducing internal covariate shift[C]∥International Conference on Machine Learning, Lille, France, 2015: 448-456. |
| 15 | Ding Xiao-han, Guo Yu-chen, Ding Gui-gang, et al. Acnet: strengthening the kernel skeletons for powerful CNN via asymmetric convolution blocks[C]∥Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Korea, 2019: 1911-1920. |
| 16 | Krizhevsky A, Sutskever I, Hinton G E. Imagenet classification with deep convolutional neural networks[J]. Communications of the ACM, 2017, 60(6): 84-90. |
| 17 | Simonyan K, Zisserman A. Very deep convolutional networks for large-scale image recognition[C]∥International Conference on Learning Representations, San Diego, CA, USA, 2015:1-14. |
| 18 | He K, Zhang X, Ren S, et al. Deep residual learning for image recognition[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, USA, 2016: 770-778. |
| 19 | Szegedy C, Vanhoucke V, Ioffe S, et al. Rethinking the inception architecture for computer vision[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, USA, 2016: 2818-2826. |
| 20 | Nurullayev S, Lee S W. Generalized parking occupancy analysis based on dilated convolutional neural network[J]. Sensors, 2019, 19(2): E277. |
| [1] | 祁贤雨,王巍,王琳,赵玉飞,董彦鹏. 基于物体语义栅格地图的语义拓扑地图构建方法[J]. 吉林大学学报(工学版), 2023, 53(2): 569-575. |
| [2] | 时小虎,吴佳琦,吴春国,程石,翁小辉,常志勇. 基于残差网络的弯道增强车道线检测方法[J]. 吉林大学学报(工学版), 2023, 53(2): 584-592. |
| [3] | 郭鹏,赵文超,雷坤. 基于改进Jaya算法的双资源约束柔性作业车间调度[J]. 吉林大学学报(工学版), 2023, 53(2): 480-487. |
| [4] | 刘近贞,高国辉,熊慧. 用于脑组织分割的多尺度注意网络[J]. 吉林大学学报(工学版), 2023, 53(2): 576-583. |
| [5] | 赵宏伟,张健荣,朱隽平,李海. 基于对比自监督学习的图像分类框架[J]. 吉林大学学报(工学版), 2022, 52(8): 1850-1856. |
| [6] | 秦贵和,黄俊锋,孙铭会. 基于双手键盘的虚拟现实文本输入[J]. 吉林大学学报(工学版), 2022, 52(8): 1881-1888. |
| [7] | 胡丹,孟新. 基于时变网格的对地观测卫星搜索海上船舶方法[J]. 吉林大学学报(工学版), 2022, 52(8): 1896-1903. |
| [8] | 申铉京,张雪峰,王玉,金玉波. 像素级卷积神经网络多聚焦图像融合算法[J]. 吉林大学学报(工学版), 2022, 52(8): 1857-1864. |
| [9] | 曲福恒,丁天雨,陆洋,杨勇,胡雅婷. 基于邻域相似性的图像码字快速搜索算法[J]. 吉林大学学报(工学版), 2022, 52(8): 1865-1871. |
| [10] | 白天,徐明蔚,刘思铭,张佶安,王喆. 基于深度神经网络的诉辩文本争议焦点识别[J]. 吉林大学学报(工学版), 2022, 52(8): 1872-1880. |
| [11] | 周丰丰,朱海洋. 基于三段式特征选择策略的脑电情感识别算法SEE[J]. 吉林大学学报(工学版), 2022, 52(8): 1834-1841. |
| [12] | 周丰丰,张亦弛. 基于稀疏自编码器的无监督特征工程算法BioSAE[J]. 吉林大学学报(工学版), 2022, 52(7): 1645-1656. |
| [13] | 王军,徐彦惠,李莉. 低能耗支持完整性验证的数据融合隐私保护方法[J]. 吉林大学学报(工学版), 2022, 52(7): 1657-1665. |
| [14] | 高明华,杨璨. 基于改进卷积神经网络的交通目标检测方法[J]. 吉林大学学报(工学版), 2022, 52(6): 1353-1361. |
| [15] | 杨怀江,王二帅,隋永新,闫丰,周跃. 简化型残差结构和快速深度残差网络[J]. 吉林大学学报(工学版), 2022, 52(6): 1413-1421. |
|