吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (3): 758-771.doi: 10.13229/j.cnki.jdxbgxb20210919
• 通信与控制工程 • 上一篇
基于因子长短期记忆的驾驶人接管行为及意图识别
姚荣涵1( ),徐文韬1,郭伟伟2
),徐文韬1,郭伟伟2
- 1.大连理工大学 交通运输学院,辽宁 大连 116024
2.北方工业大学 城市道路交通智能控制技术北京市重点实验室,北京 100144
Drivers' takeover behavior and intention recognition based on factor and long short⁃term memory
Rong-han YAO1(),Wen-tao XU1,Wei-wei GUO2
- 1.School of Transportation and Logistics,Dalian University of Technology,Dalian 116024,China
2.Beijing Key Laboratory of Urban Intelligent Traffic Control Technology,North China University of Technology,Beijing 100144,China
摘要:
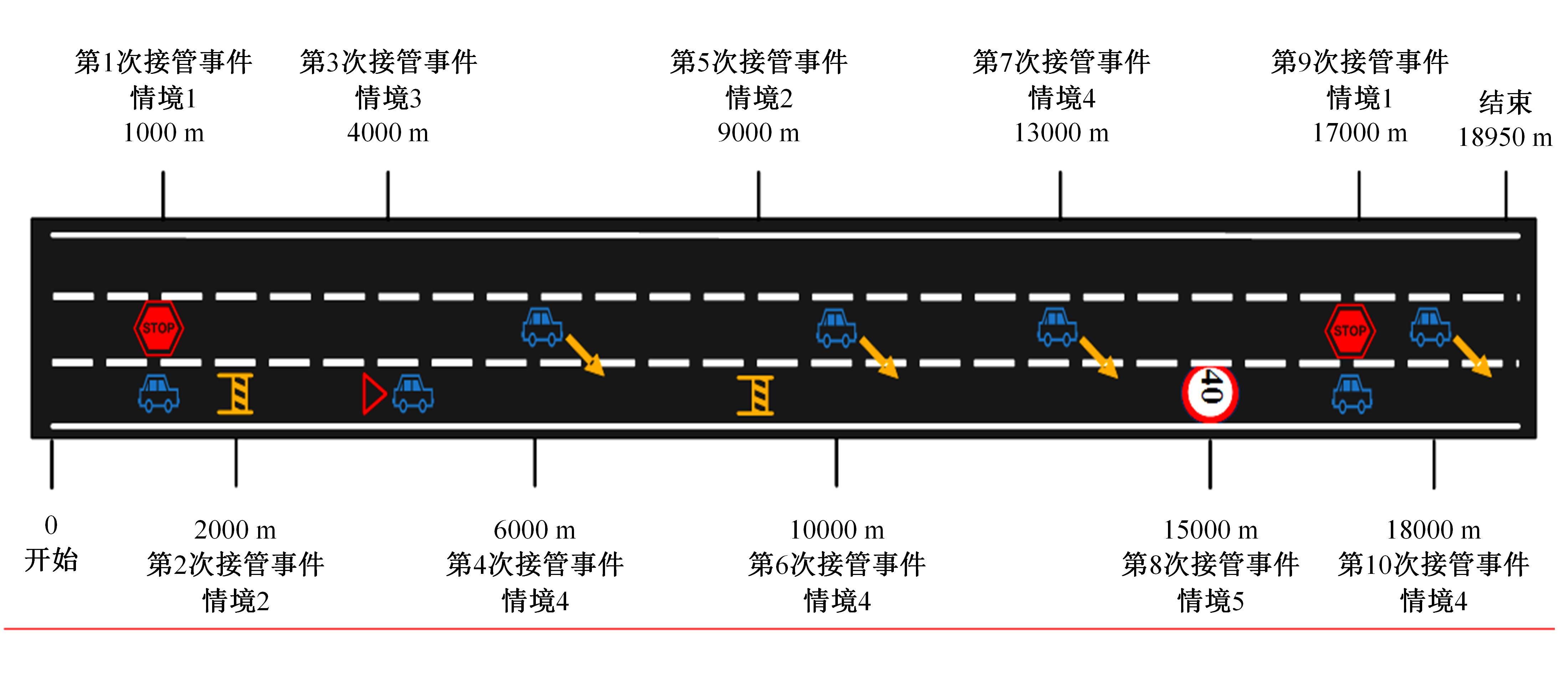
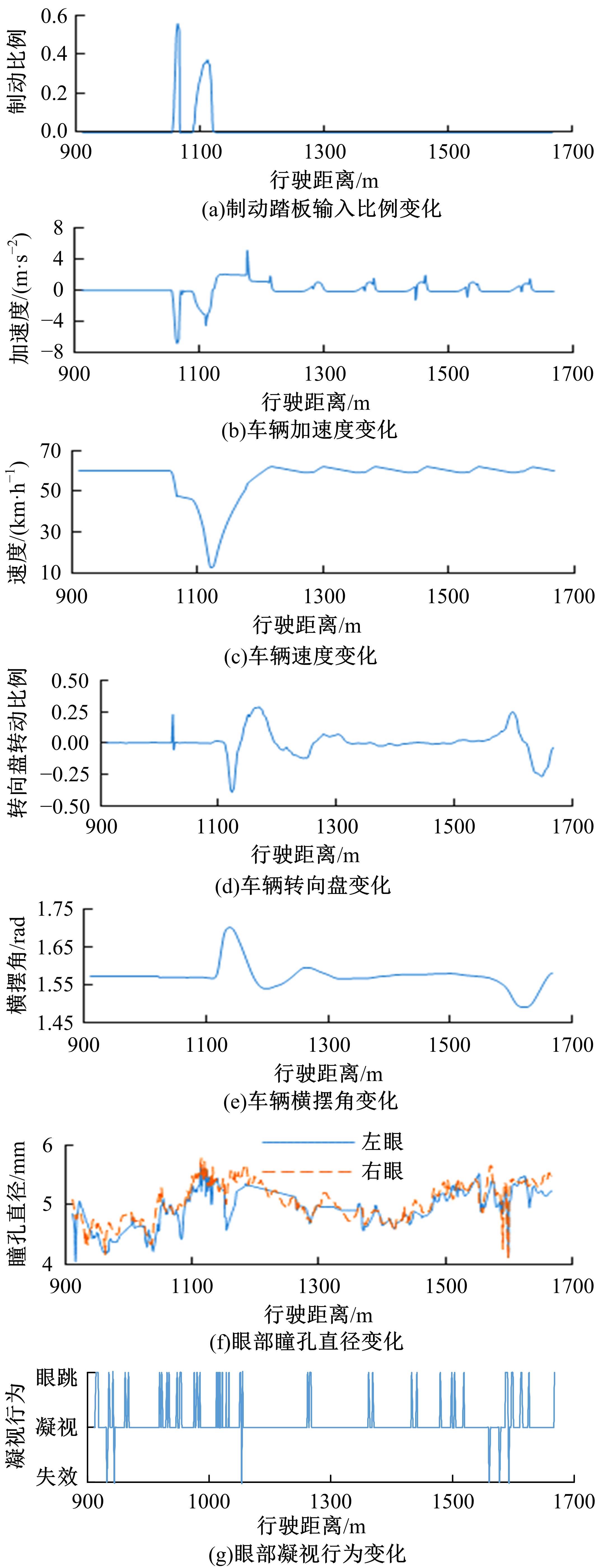
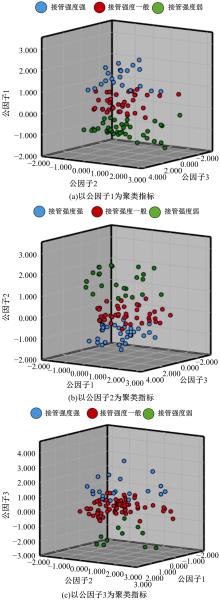
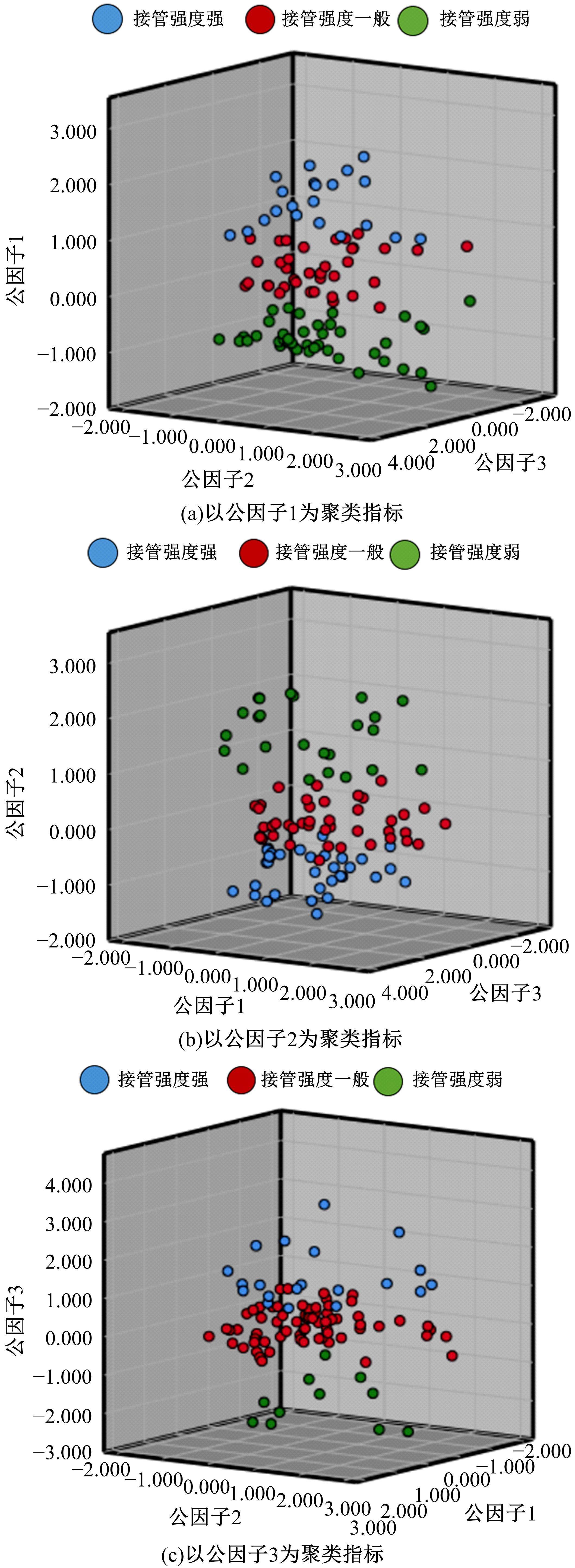
为识别自动驾驶环境下驾驶人的接管行为及意图,面向18.95 km双向六车道高速公路场景,借助驾驶模拟器和眼动仪,实施驾驶人10次面对5种紧急情境之一接管自动驾驶车辆的模拟试验。利用所得车辆运行和视觉注意力数据,根据因子分析提取得到3个公因子,采用K-means聚类分析定性识别驾驶人接管行为及意图。将因子分析分别与支持向量机和长短期记忆神经网络进行结合,获得两个定量识别驾驶人接管行为及意图的模型。研究结果表明,驾驶人接管行为受其纵向反应、横向反应和视觉注意力影响;聚类分析可定性描述不同类型驾驶人的接管行为及意图,并揭示潜在的驾驶安全隐患;相比支持向量机、长短期记忆神经网络和因子支持向量机模型,因子长短期记忆模型能更有效地识别驾驶人接管意图,其精确率、召回率、F1分数和准确率4项性能指标均最优;利用因子分析进行数据降维和有效信息浓缩所得公因子有助于提高驾驶接管意图识别模型的分类性能。本研究有助于识别出接管风险较高的驾驶人,进而设计有针对性的驾驶辅助策略。
中图分类号:
- U491.2





| 1 | de LaTorre G, Rad P, Choo K R. Driverless vehicle security: challenges and future research opportunities[J]. Future Generation Computer Systems, 2020, 108: 1092-1111. |
| 2 | SAE J3016—2016. Taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles [S]. |
| 3 | SAE J3016—2018. Taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles [S]. |
| 4 | National Highway Traffic Safety Administration. ODI resume[R]. Washington, DC: National Highway Traffic Safety Administration, 2017. |
| 5 | Lu Z J, Coster X, de Winter J C F. How much time do drivers need to obtain situation awareness? a laboratory-based study of automated driving[J]. Applied Ergonomics, 2017, 60: 293-304. |
| 6 | Endsley M R. Situation awareness global assessment technique (SAGAT)[C]∥Proceedings of the IEEE 1988 National Aerospace and Electronics Conference, Dayton, OH, USA, 1988: 789-795. |
| 7 | Samuel S, Borowsky A, Zilberstein S, et al. Minimum time to situation awareness in scenarios involving transfer of control from an automated driving suite[J]. Transportation Research Record, 2016, 2602(1): 115-120. |
| 8 | Wright T J, Samuel S, Borowsky A, et al. Experienced drivers are quicker to achieve situation awareness than inexperienced drivers in situations of transfer of control within a level 3 autonomous environment[C]∥Proceedings of the Human Factors and Ergonomics Society Annual Meeting, Los Angeles, CA, USA, 2016: 270-273. |
| 9 | Vlakveld W, van Nes N, de Bruin J, et al. Situation awareness increases when drivers have more time to take over the wheel in a level 3 automated car: a simulator study[J]. Transportation Research Part F: Psychology and Behaviour, 2018, 58: 917-929. |
| 10 | Petermeijer S M, Bazilinskyy P, Bengler K, et al. Take-over again: investigating multimodal and directional tors to get the driver back into the loop[J]. Applied Ergonomics, 2017, 62: 204-215. |
| 11 | Forster Y, Naujoks F, Neukum A, et al. Driver compliance to take-over requests with different auditory outputs in conditional automation[J]. Accident Analysis and Prevention, 2017, 109: 18-28. |
| 12 | Radlmayr J, Fischer F M, Bengler K. The influence of non-driving related tasks on driver availability in the context of conditionally automated driving[J]. Proceedings of the 20th Congress of the International Ergonomics Association, 2018, 823: 295-304. |
| 13 | Yoon S H, Ji Y G. Non-driving-related tasks, workload, and takeover performance in highly automated driving contexts[J]. Transportation Research Part F: Psychology and Behaviour, 2019, 60: 620-631. |
| 14 | Gold C, Körber M, Lechner D, et al. Taking over control from highly automated vehicles in complex traffic situations: the role of traffic density[J]. Human Factors, 2016, 58(4): 642-652. |
| 15 | Roche F, Thüring M, Trukenbrod A K. What happens when drivers of automated vehicles take over control in critical brake situations?[J]. Accident Analysis and Prevention, 2020, 144: No.105588. |
| 16 | Clark H, Feng J. Age differences in the takeover of vehicle control and engagement in non-driving-related activities in simulated driving with conditional automation[J]. Accident Analysis and Prevention, 2017, 106: 468-479. |
| 17 | Epple S, Roche F, Brandenburg S. The sooner the better: drivers' reactions to two-step take-over requests in highly automated driving[C]∥Proceedings of the Human Factors and Ergonomics Society Annual Meeting, Los Angeles, CA, USA, 2018, 62(1): 1883-1887. |
| 18 | Wiedemann K, Naujoks F, Wörle J, et al. Effect of different alcohol levels on take-over performance in conditionally automated driving[J]. Accident Analysis and Prevention, 2018, 115: 89-97. |
| 19 | Vogelpohl T, Kühn M, Hummel T, et al. Asleep at the automated wheel: sleepiness and fatigue during highly automated driving[J]. Accident Analysis and Prevention, 2019, 126: 70-84. |
| 20 | 王海星, 王翔宇, 王招贤, 等. 基于数据挖掘的危险货物运输风险驾驶行为聚类分析[J]. 交通运输系统工程与信息, 2020, 20(1): 183-189. |
| Wang Hai-xing, Wang Xiang-yu, Wang Zhao-xian, et al. Dangerous driving behavior clustering analysis for hazardous materials transportation based on data mining[J]. Journal of Transportation Systems Engineering and Information Technology, 2020, 20(1): 183-189. | |
| 21 | Zhou T, Zhang J. Analysis of commercial truck drivers' potentially dangerous driving behaviors based on 11-month digital tachograph data and multilevel modeling approach[J]. Accident Analysis and Prevention, 2019, 132: No.105256. |
| 22 | 孙剑, 张一豪, 王俊骅. 基于自然驾驶数据的分心驾驶行为识别方法[J]. 中国公路学报, 2020, 33(9): 225-235. |
| Sun Jian, Zhang Yi-hao, Wang Jun-hua. Detecting distraction behavior of drivers using naturalistic driving data[J]. China Journal of Highway and Transport, 2020, 33(9): 225-235. | |
| 23 | Jia S, Hui F, Li S N, et al. Long short-term memory and convolutional neural network for abnormal driving behaviour recognition[J]. IET Intelligent Transport Systems, 2020, 14(5): 306-312. |
| 24 | 张姝玮, 郭忠印, 杨轸, 等. 驾驶行为多重分形特征在驾驶疲劳检测中的应用[J]. 吉林大学学报: 工学版, 2021, 51(2): 557-564. |
| Zhang Shu-wei, Guo Zhong-yin, Yang Zhen, et al. Application of multi-fractal features of driving performance in driver fatigue detection[J]. Journal of Jilin University (Engineering and Technology Edition), 2021, 51(2): 557-564. | |
| 25 | 庄明科, 白海峰, 谢晓非. 驾驶人员风险驾驶行为分析及相关因素研究[J]. 北京大学学报: 自然科学版, 2007, 4: 75-82. |
| Zhuang Ming-ke, Bai Hai-feng, Xie Xiao-fei. A study on risky driving behavior and related factors[J]. Acta Scientiarum Naturalium Universitatis Pekinensis (Natural Science Edition), 2007, 4: 75-82. | |
| 26 | Child D. The Essentials of Factor Analysis[M]. London: Cassell Educational, 1990. |
| 27 | Kaiser H F. The varimax criterion for analytic rotation in factor analysis[J]. Psychometrika, 1958, 23 (3): 187-200. |
| 28 | Macqueen J. Some methods for classification and analysis of multivariate observations[C]∥Proceedings of Berkeley Symposium on Mathematical Statistics and Probability, Berkeley, CA, USA, 1967: 281-297. |
| 29 | Sun H D, Chen Y Y, Lai J H, et al. Identifying tourists and locals by K-means clustering method from mobile phone signaling data[J]. Journal of Transportation Engineering, Part A: Systems, 2021, 147(10): No.04021070. |
| 30 | Hochreiter S, Schmidhuber J. Long short-term memory[J]. Neural Computation, 1997, 9(8): 1735-1780. |
| 31 | 赵申剑, 黎彧君, 符天凡, 等 译. 深度学习[M]. 北京: 人民邮电出版社, 2017. |
| [1] | 肖雪,李克平,彭博,昌满玮. 基于决策-规划迭代框架的智驾车换道行为建模[J]. 吉林大学学报(工学版), 2023, 53(3): 746-757. |
| [2] | 马敏,胡大伟,舒兰,马壮林. 城市轨道交通网络韧性评估及恢复策略[J]. 吉林大学学报(工学版), 2023, 53(2): 396-404. |
| [3] | 王菁,万峰,董春娇,邵春福. 城市轨道交通站点吸引范围及强度建模[J]. 吉林大学学报(工学版), 2023, 53(2): 439-447. |
| [4] | 方松,马健霄,李根,沈玲宏,徐楚博. 城市快速路右侧车道移动作业区行车风险分析[J]. 吉林大学学报(工学版), 2022, 52(8): 1786-1791. |
| [5] | 宋现敏,杨舒天,刘明鑫,李志慧. 站点间公交行程时间波动特性及预测方法[J]. 吉林大学学报(工学版), 2022, 52(8): 1792-1799. |
| [6] | 张玮,张树培,罗崇恩,张生,王国林. 智能汽车紧急工况避撞轨迹规划[J]. 吉林大学学报(工学版), 2022, 52(7): 1515-1523. |
| [7] | 郑植,耿波,王福敏,董俊宏,魏思斯. 既有低等级混凝土护栏防护能力提升[J]. 吉林大学学报(工学版), 2022, 52(6): 1362-1374. |
| [8] | 吴文静,战勇斌,杨丽丽,陈润超. 考虑安全间距的合流区可变限速协调控制方法[J]. 吉林大学学报(工学版), 2022, 52(6): 1315-1323. |
| [9] | 徐洪峰,陈虹瑾,张栋,陆千惠,安娜,耿现彩. 面向网联汽车环境的单点全感应式信号配时技术[J]. 吉林大学学报(工学版), 2022, 52(6): 1324-1336. |
| [10] | 盖松雪,曾小清,岳晓园,袁子豪. 基于用户-系统双层优化算法的车位引导模型[J]. 吉林大学学报(工学版), 2022, 52(6): 1344-1352. |
| [11] | 李先通,全威,王华,孙鹏程,安鹏进,满永兴. 基于时空特征深度学习模型的路径行程时间预测[J]. 吉林大学学报(工学版), 2022, 52(3): 557-563. |
| [12] | 冯天军,孙学路,黄家盛,田秀娟,宋现敏. 基于三种过街方式的两相位信号交叉口延误[J]. 吉林大学学报(工学版), 2022, 52(3): 550-556. |
| [13] | 李兴华,冯飞宇,成诚,王洧,唐鹏程. 网约拼车服务选择偏好分析及建模[J]. 吉林大学学报(工学版), 2022, 52(3): 578-584. |
| [14] | 尹超英,邵春福,黄兆国,王晓全,王晟由. 基于梯度提升决策树的多尺度建成环境对小汽车拥有的影响[J]. 吉林大学学报(工学版), 2022, 52(3): 572-577. |
| [15] | 贾洪飞,邵子函,杨丽丽. 终点不确定条件下网约车合乘匹配模型及算法[J]. 吉林大学学报(工学版), 2022, 52(3): 564-571. |
|
||