吉林大学学报(工学版) ›› 2021, Vol. 51 ›› Issue (3): 1081-1090.doi: 10.13229/j.cnki.jdxbgxb20200057
• 通信与控制工程 • 上一篇
汽车高速换道避让路径规划及离散滑模跟踪控制
张家旭1,2( ),王欣志1,赵健1(),施正堂3
),王欣志1,赵健1(),施正堂3
- 1.吉林大学 汽车仿真与控制国家重点实验室,长春 130022
2.中国第一汽车集团有限公司 智能网联研发院,长春 130011
3.浙江亚太机电股份有限公司 智能汽车控制系统研究院,杭州 311200
Path planning and discrete sliding mode tracking control for high⁃speed lane changing collision avoidance of vehicle
Jia-xu ZHANG1,2(),Xin-zhi WANG1,Jian ZHAO1(),Zheng-tang SHI3
- 1.State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun 130022,China
2.Intelligent Network R&D Institute,China FAW Group Co. ,Ltd. ,Changchun 130011,China
3.Intelligent Vehicle Control System Research Institute,Zhejiang Asia-Pacific Mechanical and Electronic Co. ,Ltd. ,Hangzhou 311200,China
摘要:
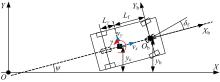
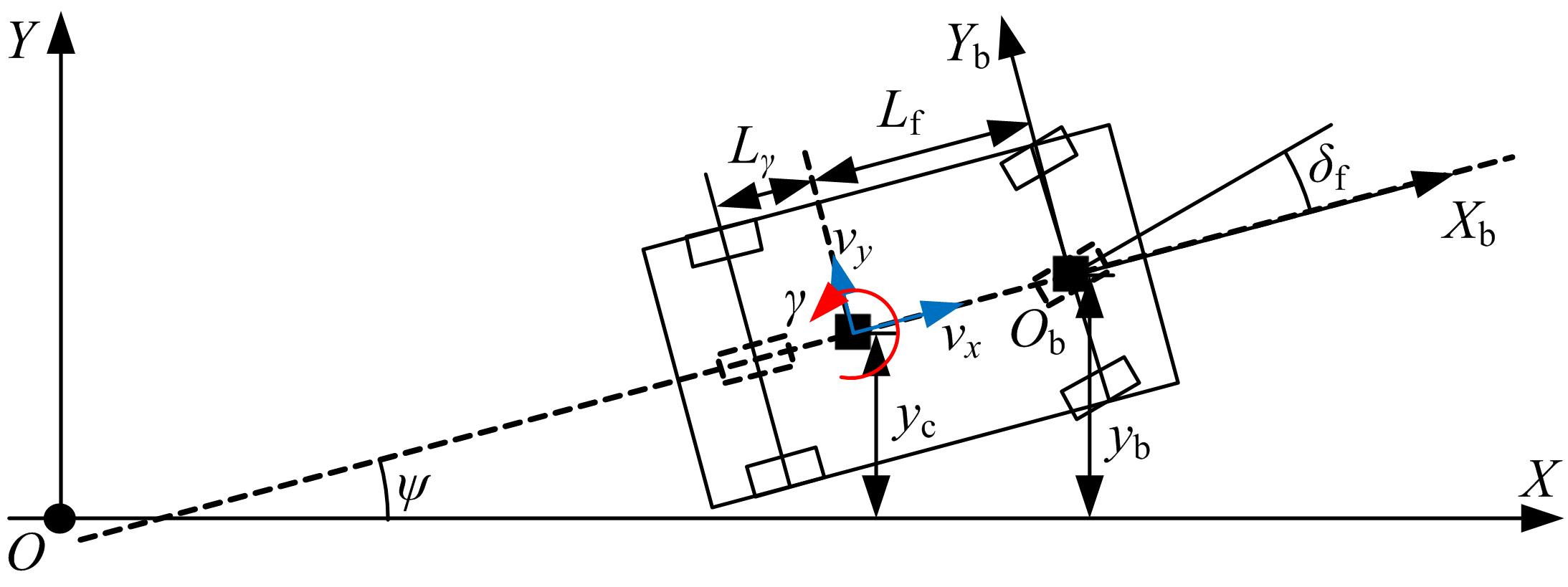
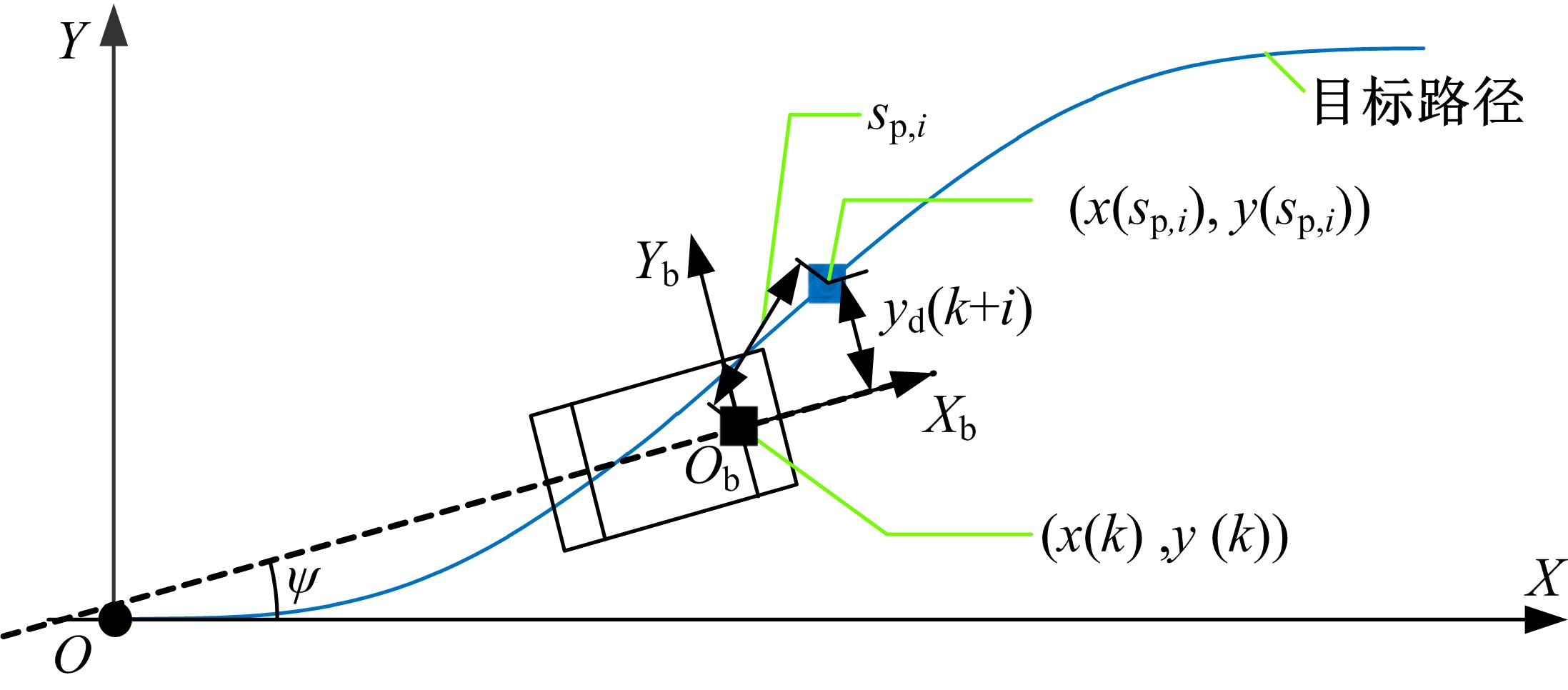
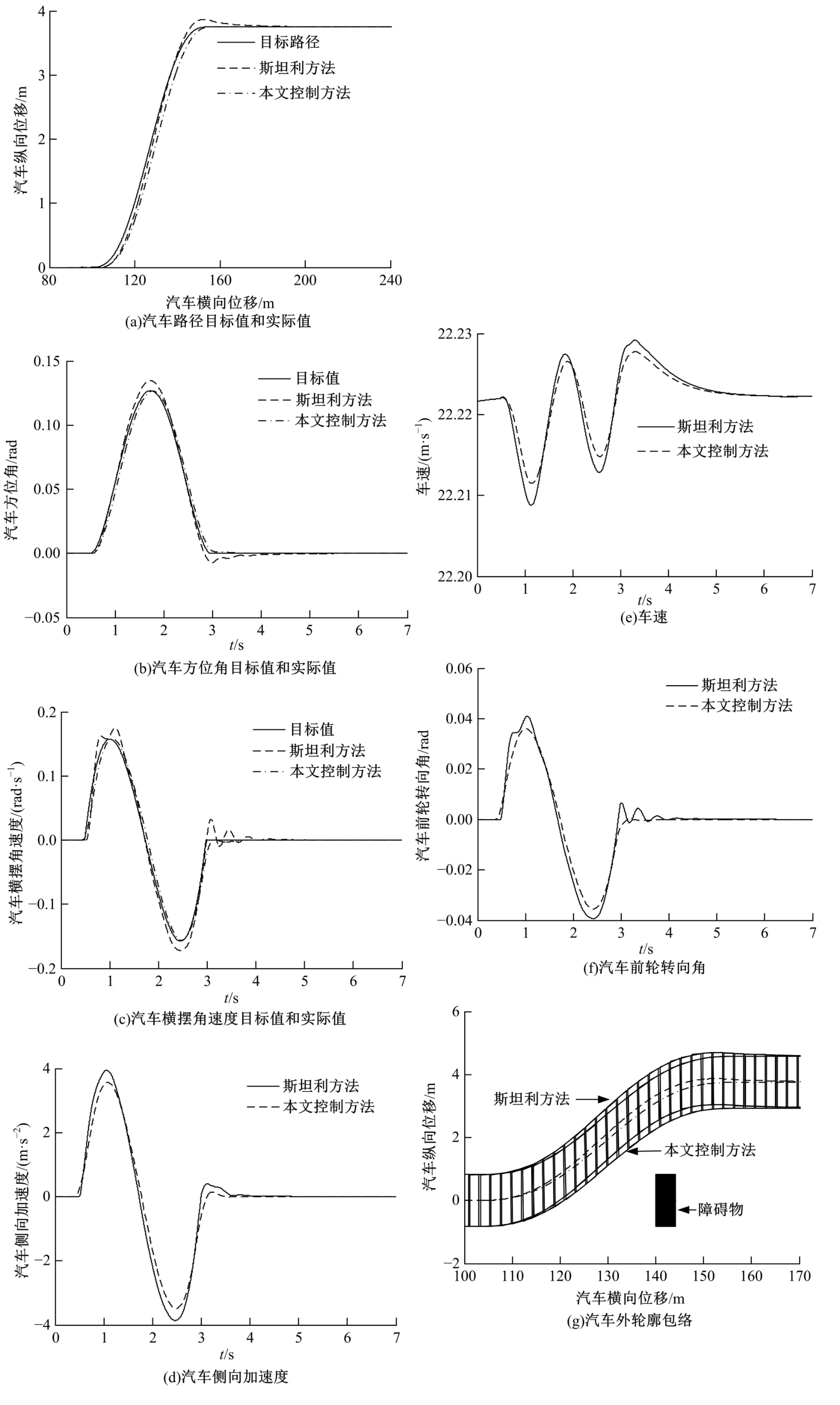
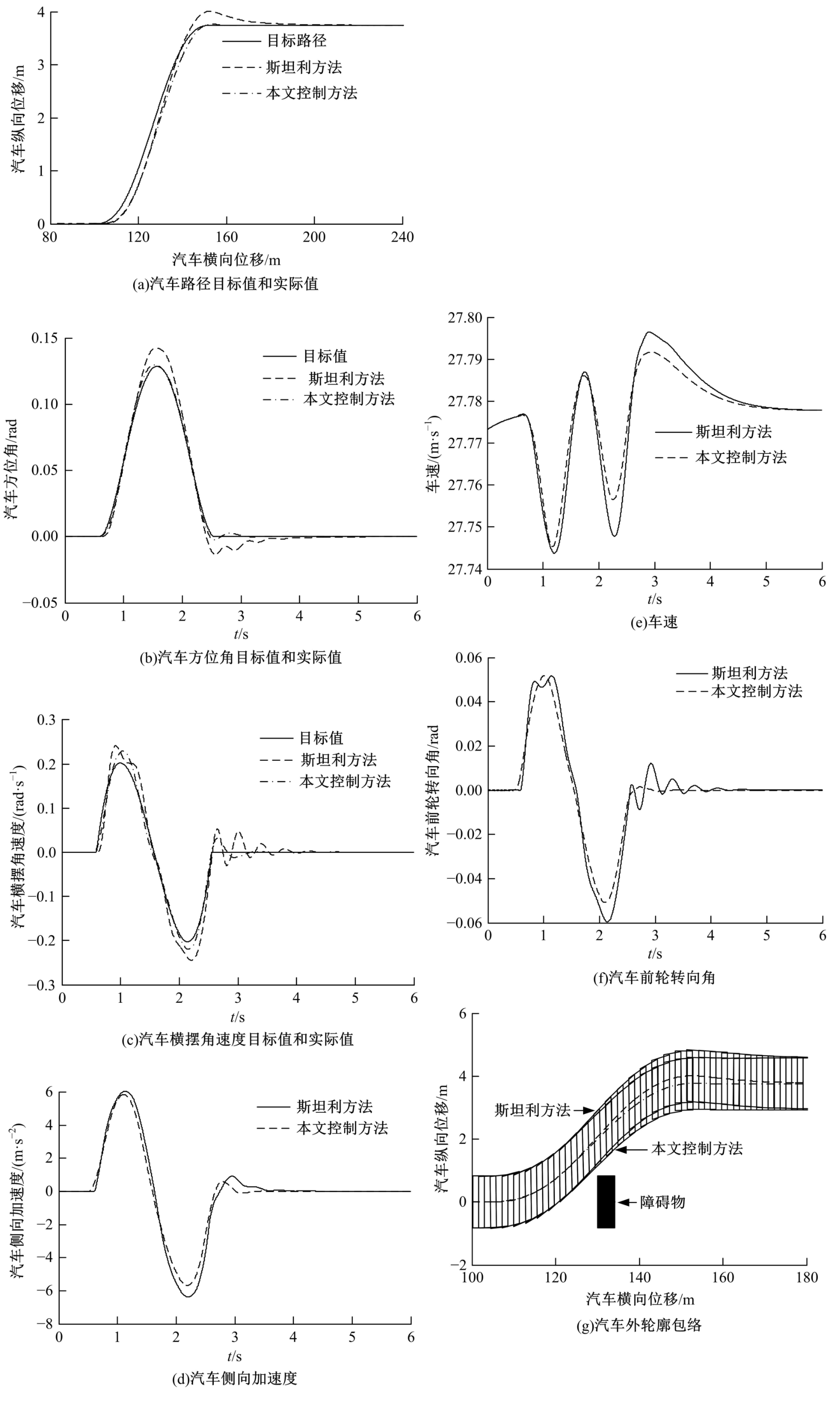
针对汽车高速换道避让路径规划和跟踪控制问题,提出了一种基于五次多项式曲线的汽车高速换道避让路径规划方法和基于离散滑模的汽车高速换道避让路径跟踪控制策略。首先,基于五次多项式曲线规划汽车高速换道避让路径,并通过查表方式间接建立汽车高速换道避让路径曲率最大值、汽车高速换道避让路径曲率变化率最大值与五次多项式曲线待定系数的映射关系,以使汽车高速换道避让路径满足乘坐舒适性和安全性需求。为了快速、稳定地跟踪基于五次多项式曲线规划的汽车高速换道避让路径,融合汽车运动学模型和线性二自由度汽车动力学模型建立了包含加性不确定性的线性离散控制模型,并基于干扰观测器的离散滑模控制理论设计了汽车高速换道避让路径跟踪控制策略。最后,利用车辆动力学软件建立了模型在环仿真系统,对本文汽车高速换道避让路径规划方法和汽车高速换道避让路径跟踪控制策略的可行性和有效性进行了仿真验证。
中图分类号:
- U461.1






| 1 | Funke J, Brown M, Erlien S M, et al. Collision avoidance and stabilization for autonomous vehicles in emergency scenarios[J]. IEEE Transactions on Control Systems Technology, 2017, 25(4): 1204-1216. |
| 2 | 张琳, 章新杰, 郭孔辉, 等. 未知环境下智能汽车轨迹规划滚动窗口优化[J]. 吉林大学学报:工学版, 2018, 48(3): 654-660. |
| Zhang Lin, Zhang Xin-jie, Guo Kong-hui, et al. Rolling window optimization for intelligent vehicle trajectory planning in unknown environment[J]. Journal of Jilin University(Engineering and Techinology Edition), 2018, 48(3): 654-660. | |
| 3 | Li Shao-song, Li Zheng, Yu Zhi-xin, et al. Dynamic trajectory planning and tracking for autonomous vehicle with obstacle avoidance based on model predictive control[J]. IEEE Access, 2019, 7: 132074-132086. |
| 4 | Minh V T, Pumwa J. Feasible path planning for autonomous vehicles[J/OL]. [2020-01-05]. |
| 5 | Wang C Y, Zhao W Z, Xu Z J, et al. Path planning and stability control of collision avoidance system based on active front steering[J]. Science China Technological Sciences, 2017, 60(8): 1231-1243. |
| 6 | Peng T, Su L L, Zhang R H, et al. A new safe lane-change trajectory model and collision avoidance control method for automatic driving vehicles[J]. Expert Systems with Applications, 2020, 141: 112953. |
| 7 | Song Xiao-lin, Cao Hao-tian, Huang Jiang. Vehicle path planning in various driving situations based on the elastic band theory for highway collision avoidance[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2013, 227(12): 1706-1722. |
| 8 | Ji J, Khajepour A, Melek W, et al. Path planning and tracking for vehicle collision avoidance based on model predictive control with multi-constraints[J]. IEEE Transactions on Vehicular Technology, 2017, 66(2): 952-964. |
| 9 | Guo Hong-yan, Jia Rui, Yu Zai-tao, et al. Obstacle avoidance for autonomous ground vehicles based on moving horizon optimization[C]∥Proceeding of the 11th World Congress on Intelligent Control and Automation, Shenyang, China, 2014. |
| 10 | Zhang Chao-yong, Chu Duan-feng, Liu Shi-dong, et al. Trajectory planning and tracking for autonomous vehicle based on state lattice and model predictive control[J]. IEEE Intelligent Transportation Systems Magazine, 2019, 11(2): 29-40. |
| 11 | 张家旭, 张振兆, 赵健, 等. 采用极点配置的自动驾驶汽车换道路径规划与跟踪控制[J]. 西安交通大学学报, 2020, 54(10): 160-167. |
| Zhang Jia-xu, Zhang Zhen-zhao, Zhao Jian, et al. A path planning and tracking control method for lane changing of autonomous vehicle using pole assignment[J]. Journal of Xi'an Jiaotong University, 2020, 54(10):160-167. | |
| 12 | Rajamani R. Vehicle Dynamics and Control[M]. New York:Springer, 2006. |
| 13 | 张家旭, 赵健, 施正堂, 等. 基于回旋曲线的平行泊车路径规划与跟踪控制[J]. 吉林大学学报:工学版, 2020, 50(6): 2247-2257. |
| Zhang Jia-xu, Zhao Jian, Shi Zheng-tang, et al. Path planning and tracking control for parallel parking based on clothoid curve[J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(6):2247-2257. | |
| 14 | Mousavinejad E, Han Q L, Yang F W, et al. Integrated control of ground vehicles dynamics via advanced terminal sliding mode control[J]. Vehicle System Dynamics, 2017, 55(2): 268-294. |
| 15 | Eun Y, Kim J H, Kim K, et al. Discrete-time variable structure controller with a decoupled disturbance compensator and its application to a CNC servomechanism[J]. IEEE Transactions on Control Systems Technology, 1999, 7(4): 414-423. |
| 16 | Thrun S, Montemerlo M, Dahlkamp H, et al. Stanley: the robot that won the DARPA grand challenge[J]. Journal of Field Robotics, 2006, 23(9): 661-692. |
| [1] | 陈国迎,姚军,王鹏,夏其坤. 适用于后轮轮毂驱动车辆的稳定性控制策略[J]. 吉林大学学报(工学版), 2021, 51(2): 397-405. |
| [2] | 王伟达,武燕杰,史家磊,李亮. 基于驾驶员意图识别的电子液压制动助力系统控制策略[J]. 吉林大学学报(工学版), 2021, 51(2): 406-413. |
| [3] | 李寿涛,王蕊,徐靖淳,王德军,田彦涛,于丁力. 一种基于模型预测复合控制的车辆避碰控制方法[J]. 吉林大学学报(工学版), 2021, 51(2): 738-746. |
| [4] | 熊璐,魏琰超,高乐天. 基于惯性测量单元/轮速融合的车辆零速检测方法[J]. 吉林大学学报(工学版), 2021, 51(1): 134-138. |
| [5] | 吴岛,张立斌,张云翔,单洪颖,单红梅. 基于滑移率辨识的汽车制动时序视觉检测方法[J]. 吉林大学学报(工学版), 2021, 51(1): 206-216. |
| [6] | 张恩慧,何仁,苏卫东. 不同挡板结构对油箱内油液晃动特性的数值分析[J]. 吉林大学学报(工学版), 2021, 51(1): 83-95. |
| [7] | 马芳武,梁鸿宇,王强,蒲永锋. 双材料负泊松比结构的面内冲击动力学性能[J]. 吉林大学学报(工学版), 2021, 51(1): 114-121. |
| [8] | 杜常清,曹锡良,何彪,任卫群. 基于混合粒子群算法的双离合变速器参数优化设计[J]. 吉林大学学报(工学版), 2020, 50(5): 1556-1564. |
| [9] | 高菲,肖阳,张文华,祁锦轩,李子樵,马骁远. 高温和荷电状态对锂离子电池单体力学响应的耦合影响[J]. 吉林大学学报(工学版), 2020, 50(5): 1574-1583. |
| [10] | 李静,石求军,洪良,刘鹏. 基于车辆状态估计的商用车ESC神经网络滑模控制[J]. 吉林大学学报(工学版), 2020, 50(5): 1545-1555. |
| [11] | 陈吉清,蓝庆生,兰凤崇,刘照麟. 基于轮胎力预判与拟合的轨迹跟踪控制[J]. 吉林大学学报(工学版), 2020, 50(5): 1565-1573. |
| [12] | 杨志刚,范亚军,夏超,储世俊,单希壮. 基于双稳态尾迹的方背Ahmed模型减阻[J]. 吉林大学学报(工学版), 2020, 50(5): 1635-1644. |
| [13] | 沈哲,王毅刚,杨志刚,贺银芝. 风洞中未知声源漂移误差的逼近修正[J]. 吉林大学学报(工学版), 2020, 50(5): 1584-1589. |
| [14] | 刘钊,程江琳,朱玉田,郑立辉. 轨道车辆垂向振动建模及运动关联分析[J]. 吉林大学学报(工学版), 2020, 50(5): 1600-1607. |
| [15] | 陈鑫,王宁,沈传亮,冯晓,杨昌海. 后视镜造型对前侧窗气动噪声的影响[J]. 吉林大学学报(工学版), 2020, 50(2): 426-436. |
|
||