吉林大学学报(工学版) ›› 2022, Vol. 52 ›› Issue (7): 1515-1523.doi: 10.13229/j.cnki.jdxbgxb20210118
• 车辆工程·机械工程 • 上一篇
智能汽车紧急工况避撞轨迹规划
张玮( ),张树培(),罗崇恩,张生,王国林
),张树培(),罗崇恩,张生,王国林
- 江苏大学 汽车与交通工程学院,江苏 镇江 212013
Collision avoidance trajectory planning for intelligent vehicles in emergency conditions
Wei ZHANG(),Shu-pei ZHANG(),Chong-en LUO,Sheng ZHANG,Guo-lin WANG
- School of Automotive and Traffic Engineering,Jiangsu University,Zhenjiang 212013,China
摘要:
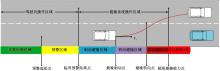
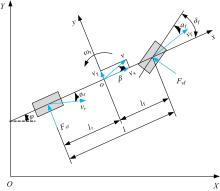
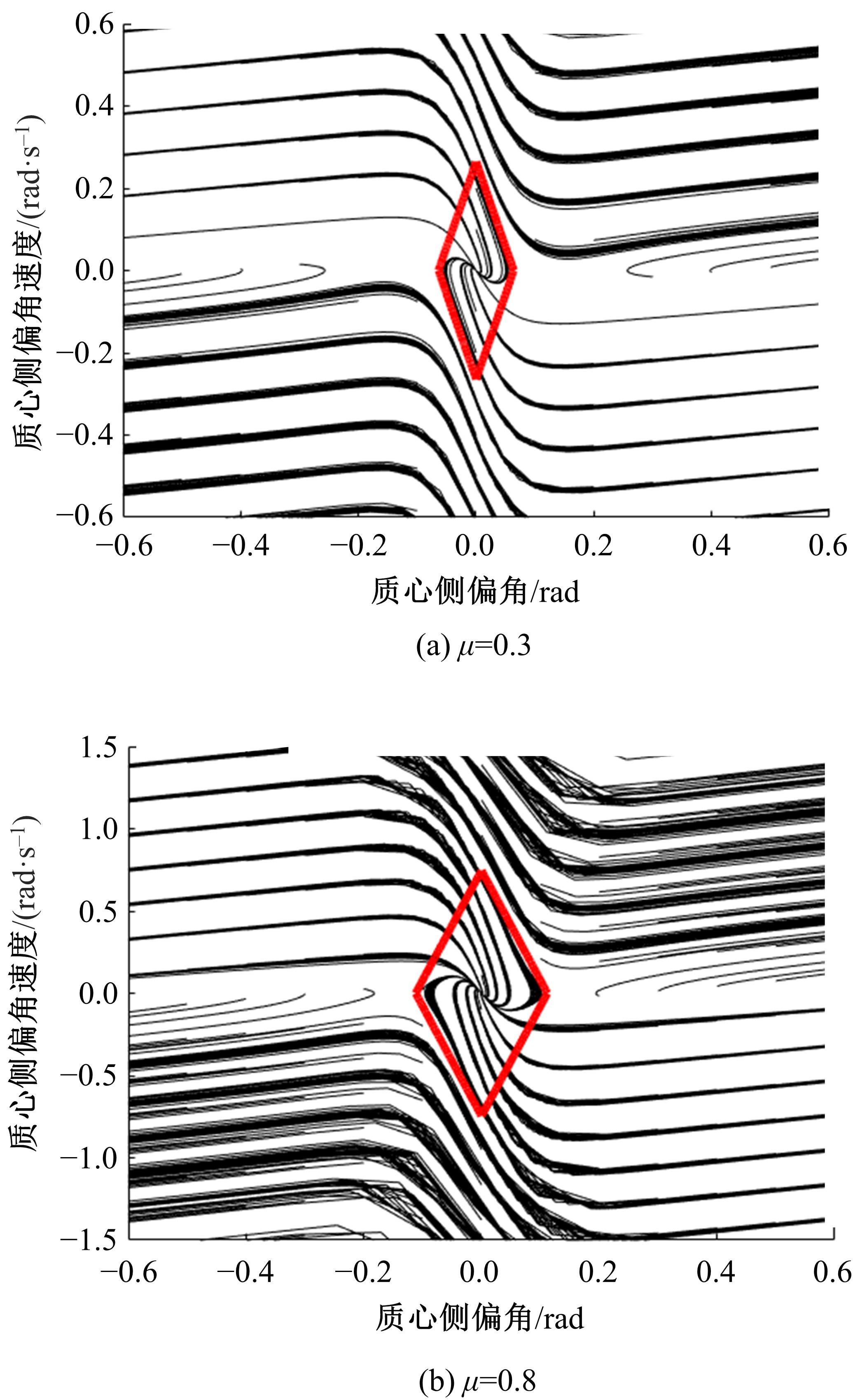
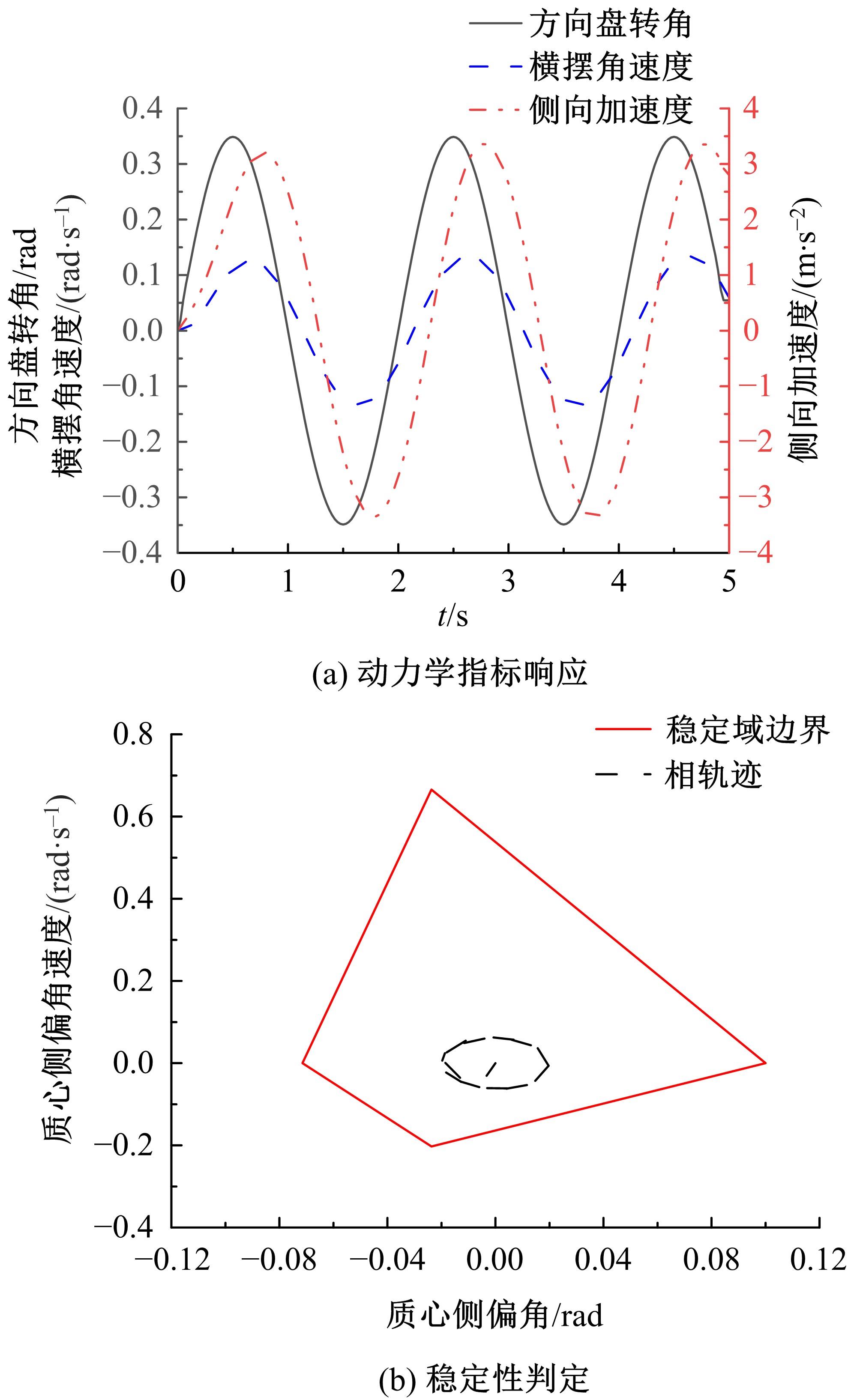
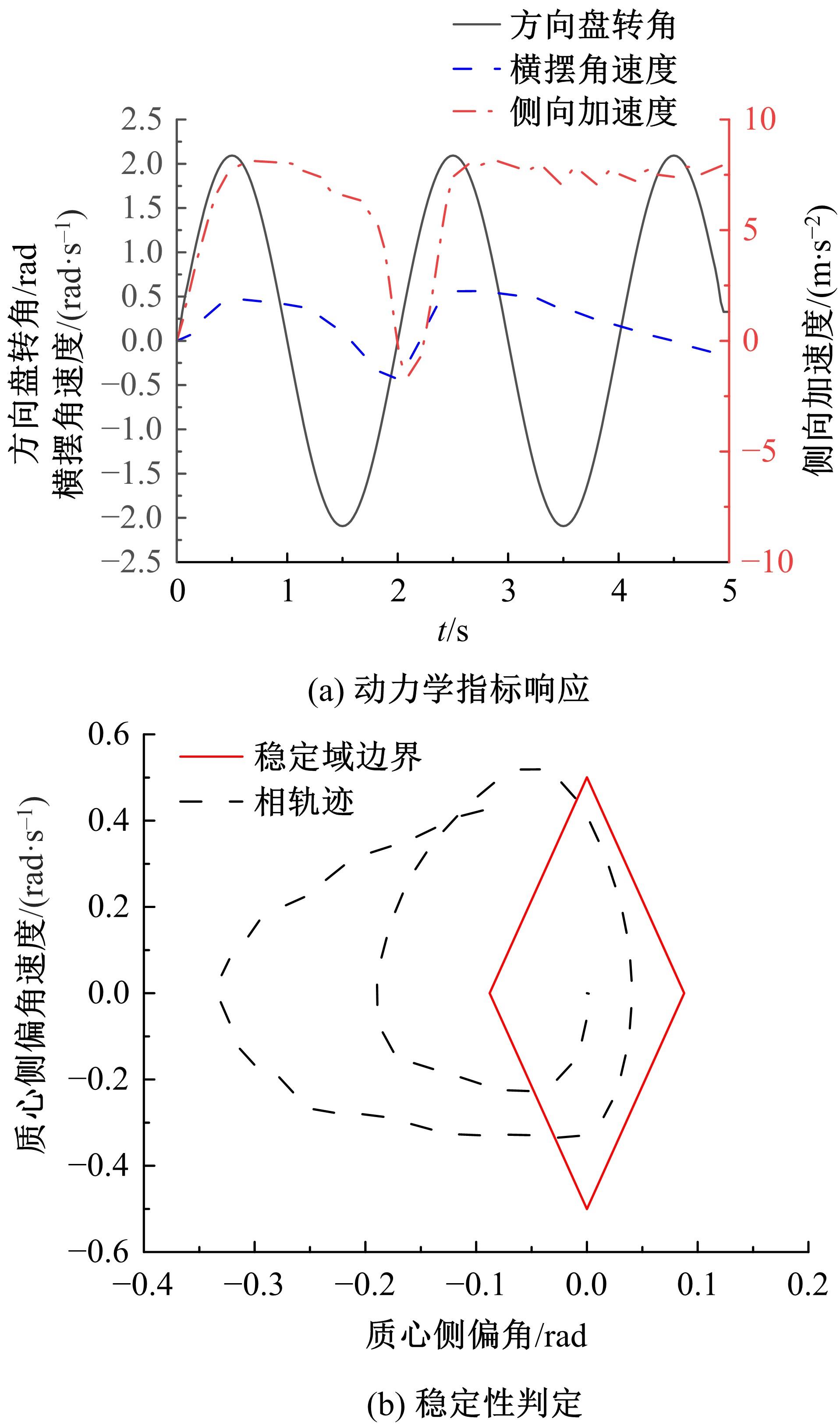
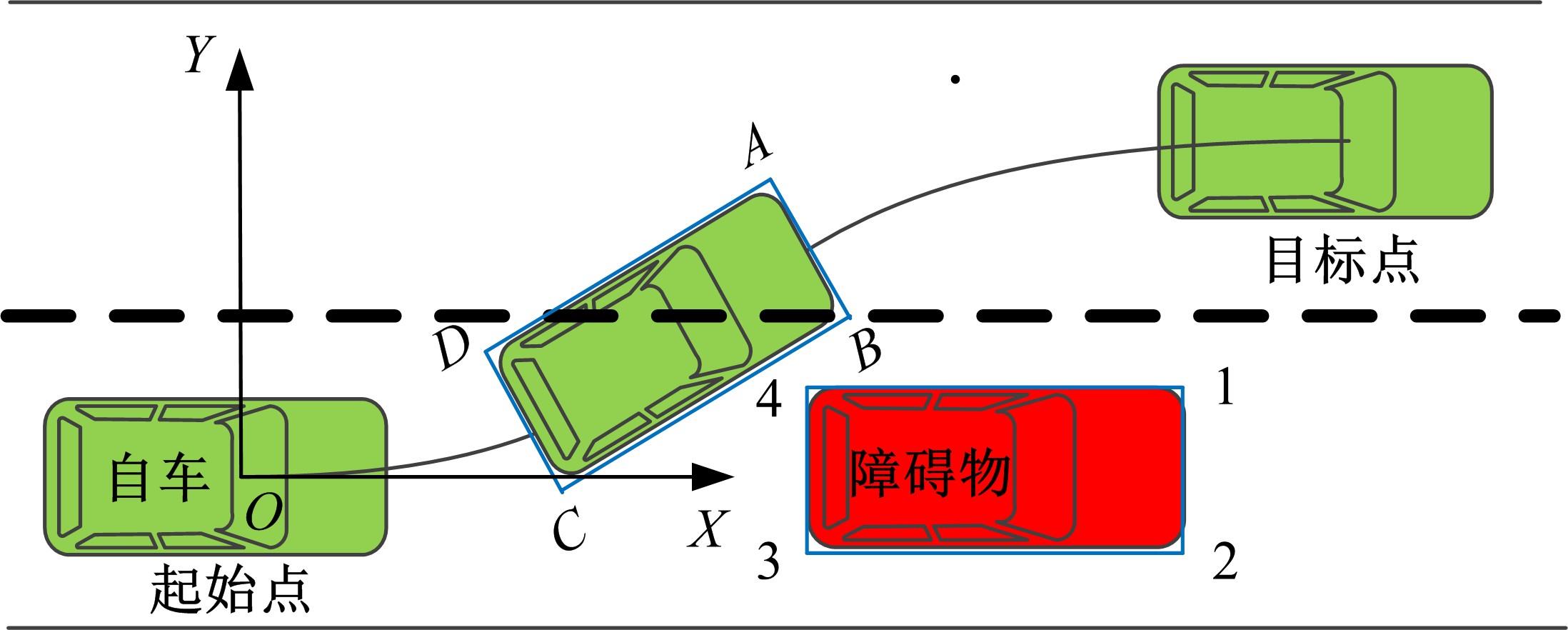
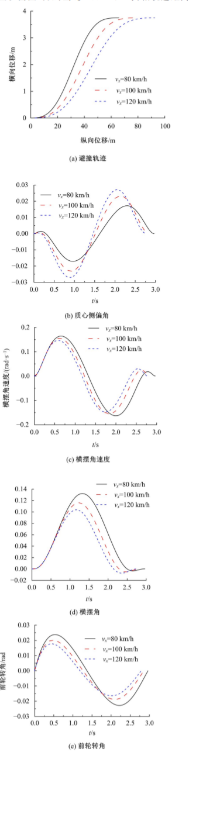
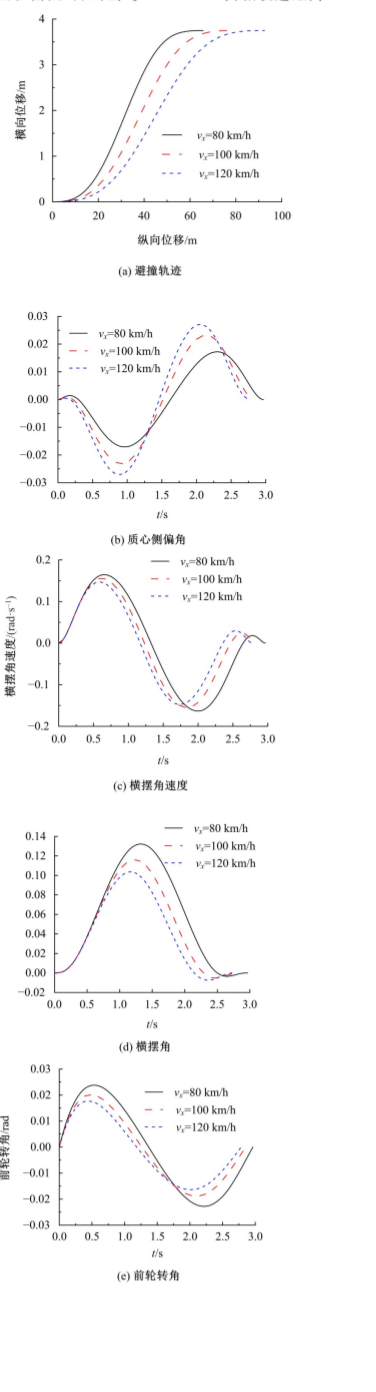
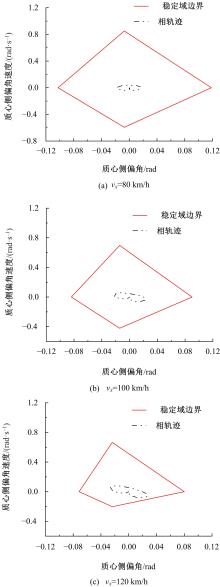
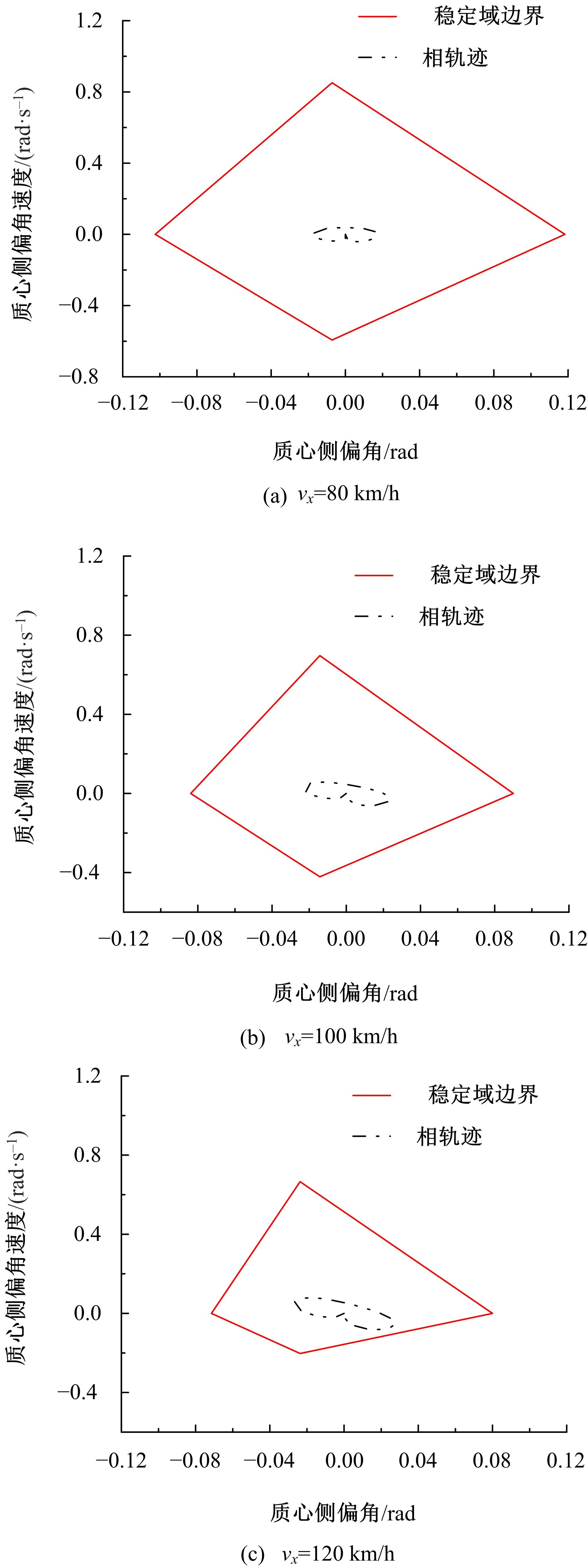
针对现有轨迹规划方法强制性的稳定性约束导致车辆避撞潜能得不到充分利用,进而无法为智能汽车在某些临界工况下规划出有效避撞轨迹的实际问题,提出了紧急工况的概念及界定方法,基于最优控制理论,综合了非线性车辆动力学模型、稳定域信息和环境信息,同时考虑车辆转向执行机构的饱和约束,开发了智能汽车紧急工况避撞轨迹规划方法。仿真结果表明,本方法能够准确规划出紧急工况下车辆临界稳定状态时的安全避撞轨迹,且在不同路面上均有良好的适用性,为智能汽车的避撞控制系统开发提供了有力的理论支持。
中图分类号:
- U491






| 1 | 周兵,万希,吴晓建,等. 紧急避撞工况下的路径规划与跟踪[J]. 湖南大学学报:自然科学版, 2020, 47 (10): 11-18. |
| Zhou Bing, Wan Xi, Wu Xiao-jian, et al. Path planning and tracking in scenario of emergency collision avoidance[J]. Journal of Hunan University(Natural Sciences), 2020, 47 (10): 11-18. | |
| 2 | Ji J, Khajepour A, Melek W W, et al. Path planning and tracking for vehicle collision avoidance based on model predictive control with multiconstraints[J]. IEEE Transactions on Vehicular Technology, 2017, 66(2): 952-964. |
| 3 | Li B, Zhang Y, Feng Y, et al. Balancing computation speed and quality: a decentralized motion planning method for cooperative lane changes of connected and automated vehicles[J]. IEEE Transactions on Intelligent Vehicles, 2018(3): 340-350. |
| 4 | 张友安,王丽英,张刚,等. 轨迹优化的直接数值解法综述[J].海军航空工程学院学报, 2012, 27(5): 481-486, 498. |
| Zhang You-an, Wang Li-ying, Zhang Gang, et al. A survey of numerical methods for trajectory optimization[J]. Journal of Naval Aeronautical Engineering Institute,2012,27(5):481-486, 498. | |
| 5 | 余卓平, 李奕姗, 熊璐. 无人车运动规划算法综述[J]. 同济大学学报:自然科学版, 2017, 45(8): 1150-1159. |
| Yu Zhuo-ping, Li Yi-shan, Xiong Lu. A review of the motion planning problem of autonomous vehicle[J]. Journal of Tongji University(Natural Science), 2017, 45(8):1150-1159. | |
| 6 | Inagaki S, Kushiro I, Yamamoto M. Analysis on vehicle stability in critical cornering using phase-plane method[J]. JSAE Review, 1994, 16(2): 211-216. |
| 7 | 熊璐, 曲彤, 冯源,等. 极限工况下车辆行驶的稳定性判据[J]. 机械工程学报, 2015, 51(10): 103-111. |
| Xiong Lu, Qu Tong, Feng Yuan, et al. Stability criterion for the vehicle under critical driving situation[J]. Journal of Mechanical Engineering, 2015, 51(10): 103-111. | |
| 8 | Liu W, Xiong L, Leng B, et al. Vehicle stability criterion research based on phase plane method[C]∥ WCX™ SAE World Congress Experience,Detroit, USA,2017. |
| 9 | 孟少华,向锦武,罗漳平,等. 微小型无人直升机避障最优轨迹规划[J]. 北京航空航天大学学报, 2014, 40(2): 246-251. |
| Meng Shao-hua, Xiang Jin-wu, Luo Zhang-ping, et al. Optimal trajectory planning for small-scale unmanned helicopter obstacle avoidance[J]. Journal of Beijing University of Aeronautics and Astronautics, 2014, 40(2): 246-251. | |
| 10 | Li B, Shao Z. A unified motion planning method for parking an autonomous vehicle in the presence of irregularly placed obstacles[J]. Knowledge Based Systems, 2015, 86: 11-20. |
| 11 | Patterson M A, Rao A V. GPOPS-II: a Matlab software for solving multiple-phase optimal control problems using hp-adaptive gaussian quadrature collocation methods and sparse nonlinear programming[J]. ACM Transactions on Mathematical Software, 2010, 41(1): 1-37. |
| [1] | 盖松雪,曾小清,岳晓园,袁子豪. 基于用户-系统双层优化算法的车位引导模型[J]. 吉林大学学报(工学版), 2022, 52(6): 1344-1352. |
| [2] | 吴文静,战勇斌,杨丽丽,陈润超. 考虑安全间距的合流区可变限速协调控制方法[J]. 吉林大学学报(工学版), 2022, 52(6): 1315-1323. |
| [3] | 徐洪峰,陈虹瑾,张栋,陆千惠,安娜,耿现彩. 面向网联汽车环境的单点全感应式信号配时技术[J]. 吉林大学学报(工学版), 2022, 52(6): 1324-1336. |
| [4] | 郑植,耿波,王福敏,董俊宏,魏思斯. 既有低等级混凝土护栏防护能力提升[J]. 吉林大学学报(工学版), 2022, 52(6): 1362-1374. |
| [5] | 贾洪飞,邵子函,杨丽丽. 终点不确定条件下网约车合乘匹配模型及算法[J]. 吉林大学学报(工学版), 2022, 52(3): 564-571. |
| [6] | 尹超英,邵春福,黄兆国,王晓全,王晟由. 基于梯度提升决策树的多尺度建成环境对小汽车拥有的影响[J]. 吉林大学学报(工学版), 2022, 52(3): 572-577. |
| [7] | 李先通,全威,王华,孙鹏程,安鹏进,满永兴. 基于时空特征深度学习模型的路径行程时间预测[J]. 吉林大学学报(工学版), 2022, 52(3): 557-563. |
| [8] | 冯天军,孙学路,黄家盛,田秀娟,宋现敏. 基于三种过街方式的两相位信号交叉口延误[J]. 吉林大学学报(工学版), 2022, 52(3): 550-556. |
| [9] | 李兴华,冯飞宇,成诚,王洧,唐鹏程. 网约拼车服务选择偏好分析及建模[J]. 吉林大学学报(工学版), 2022, 52(3): 578-584. |
| [10] | 薛锋,何传磊,黄倩,罗建. 多式轨道交通网络的耦合协调度[J]. 吉林大学学报(工学版), 2021, 51(6): 2040-2050. |
| [11] | 鲜斌,张诗婧,韩晓薇,蔡佳明,王岭. 基于强化学习的无人机吊挂负载系统轨迹规划[J]. 吉林大学学报(工学版), 2021, 51(6): 2259-2267. |
| [12] | 贾彦峰,曲大义,林璐,姚荣涵,马晓龙. 基于运行轨迹的网联混合车流速度协调控制[J]. 吉林大学学报(工学版), 2021, 51(6): 2051-2060. |
| [13] | 陆文琦,周天,谷远利,芮一康,冉斌. 基于张量分解理论的车道级交通流数据修复算法[J]. 吉林大学学报(工学版), 2021, 51(5): 1708-1715. |
| [14] | 卢凯,吴蔚,林观荣,田鑫,徐建闽. 基于KNN回归的客运枢纽聚集人数组合预测方法[J]. 吉林大学学报(工学版), 2021, 51(4): 1241-1250. |
| [15] | 彭博,张媛媛,王玉婷,唐聚,谢济铭. 基于自动编码机-分类器的视频交通状态自动识别[J]. 吉林大学学报(工学版), 2021, 51(3): 886-892. |
|
||