吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (3): 735-745.doi: 10.13229/j.cnki.jdxbgxb20211062
• 通信与控制工程 • 上一篇
智能汽车纵横向整体反馈线性化控制
高松1( ),王玉琼1,王玉海2,3,徐艺1,周英超1,王鹏伟1
),王玉琼1,王玉海2,3,徐艺1,周英超1,王鹏伟1
- 1.山东理工大学 交通与车辆工程学院,山东 淄博 255000
2.吉林大学 汽车仿真与控制国家重点实验室,长春 130022
3.吉林大学 青岛汽车研究院,山东 青岛 266043
Longitudinal and lateral integrated feedback linearization control for intelligent vehicle
Song GAO1(),Yu-qiong WANG1,Yu-hai WANG2,3,Yi XU1,Ying-chao ZHOU1,Peng-wei WANG1
- 1.School of Transportation and Vehicle Engineering,Shandong University of Technology,Zibo 255000,China
2.State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun 130022,China
3.Qingdao Automotive Research Institute,Jilin University,Qingdao 266043,China
摘要:
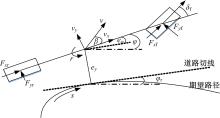
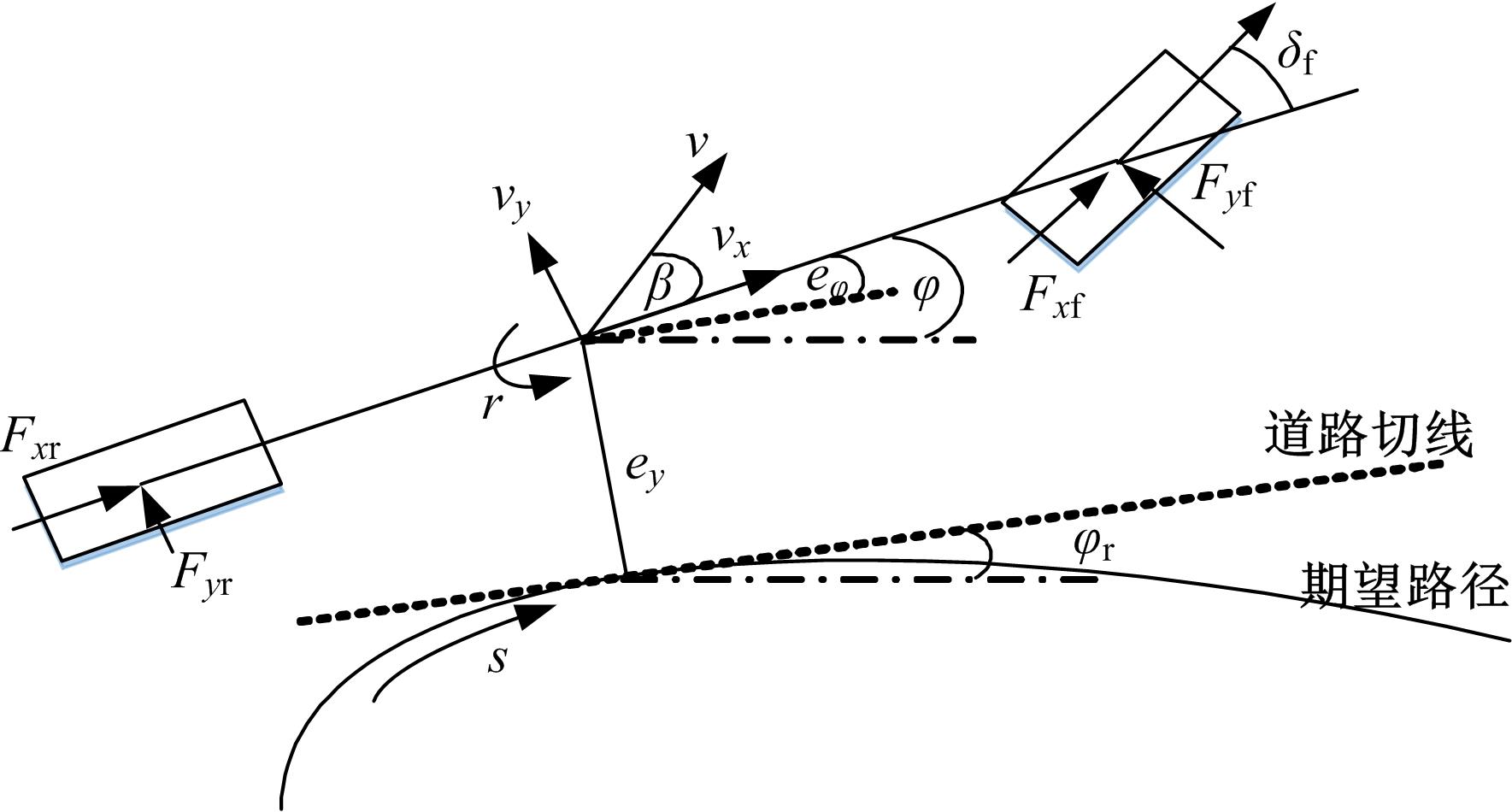
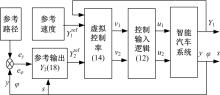
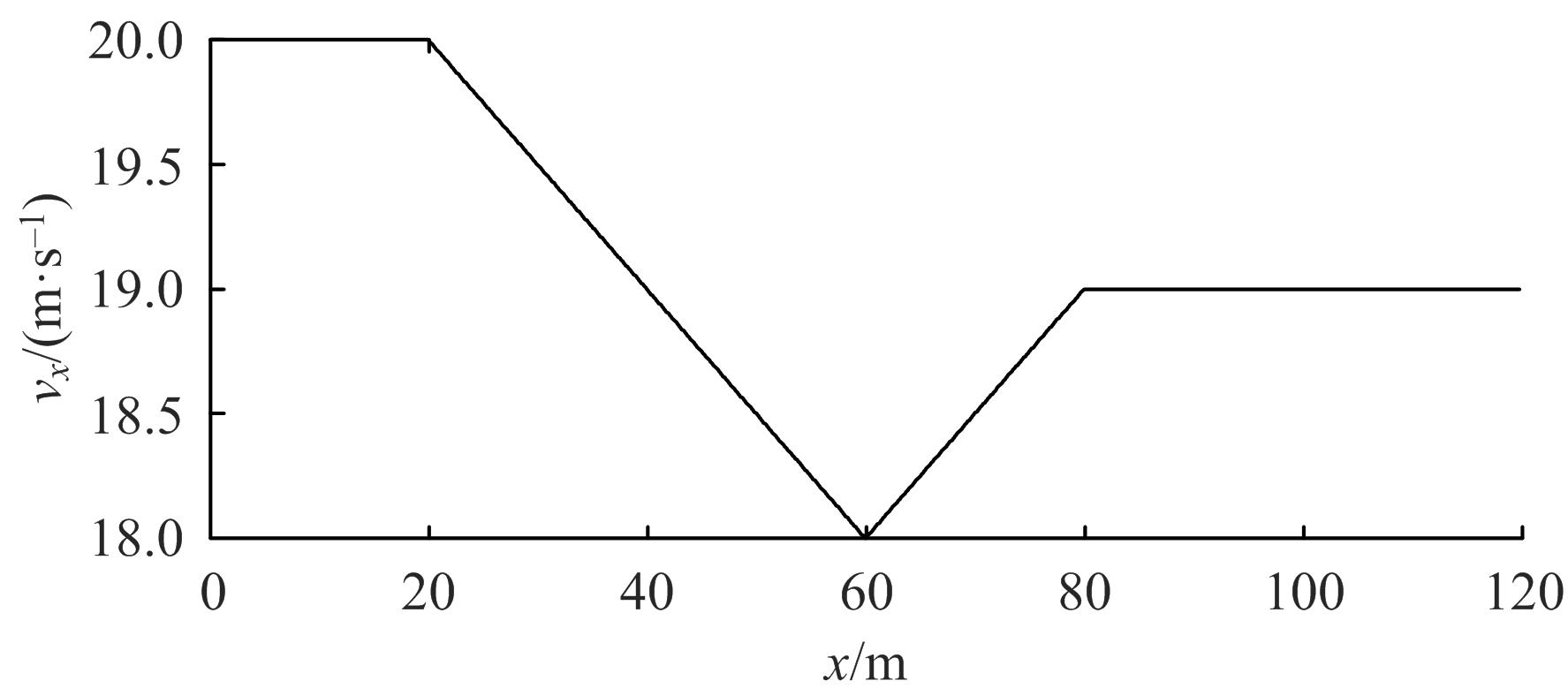
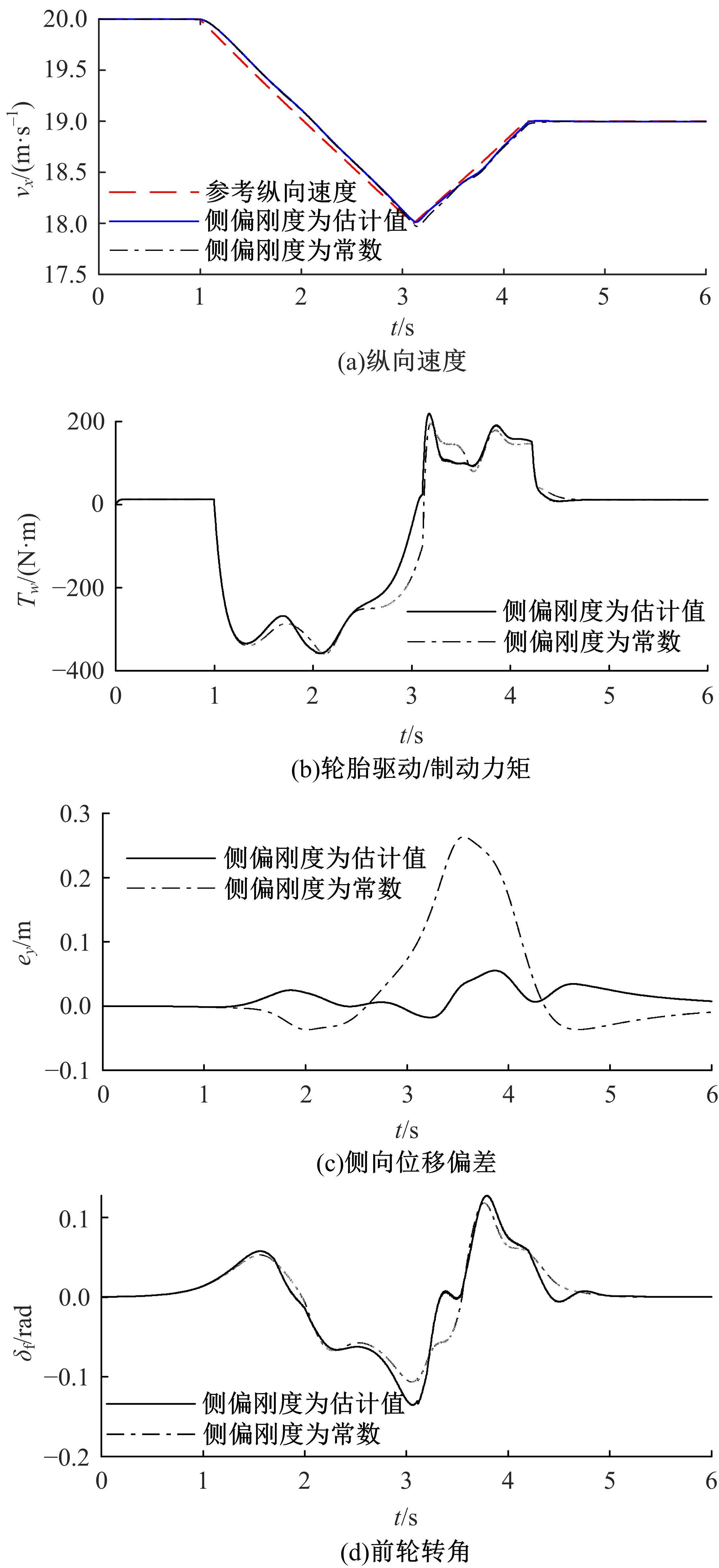
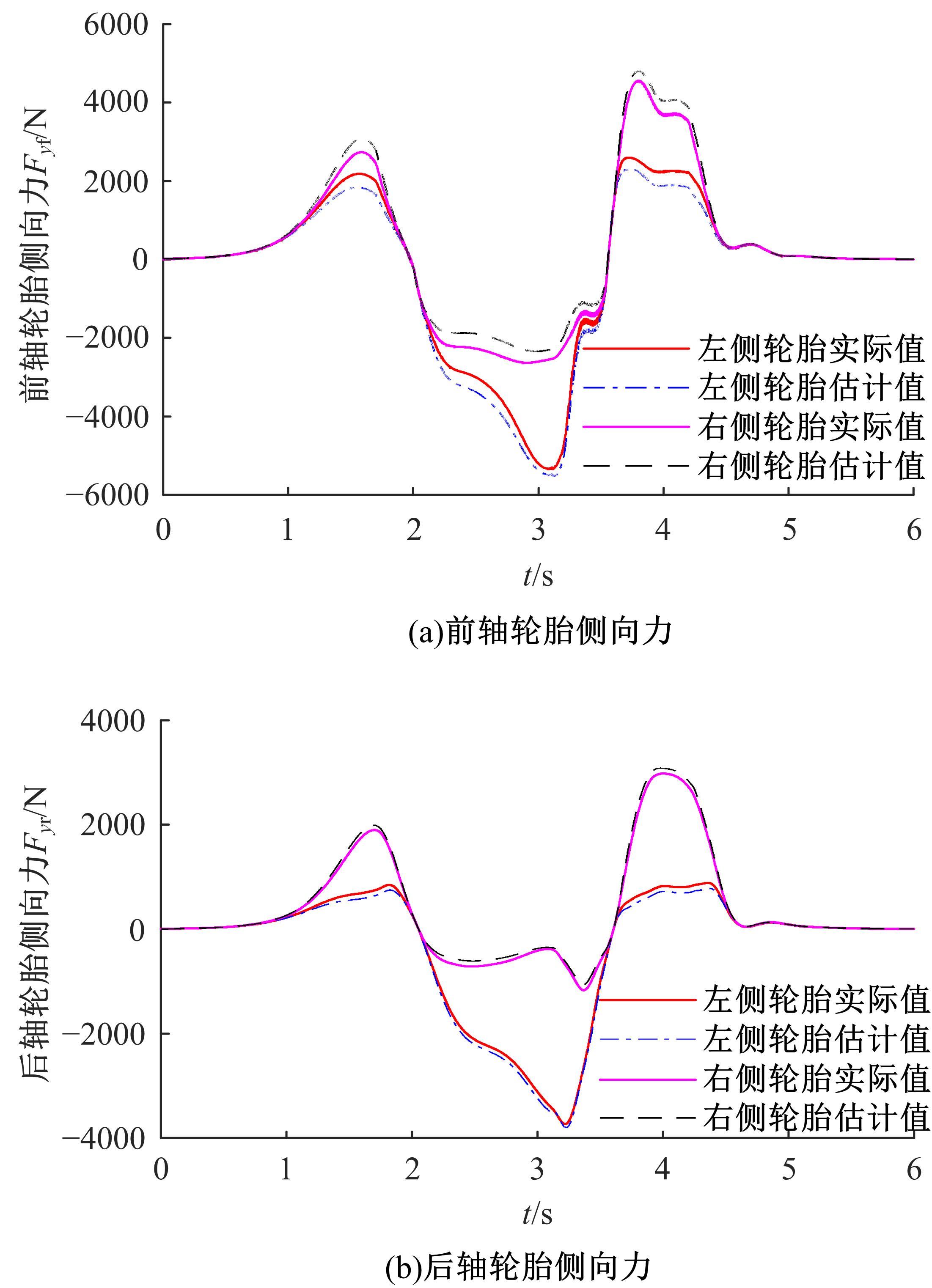
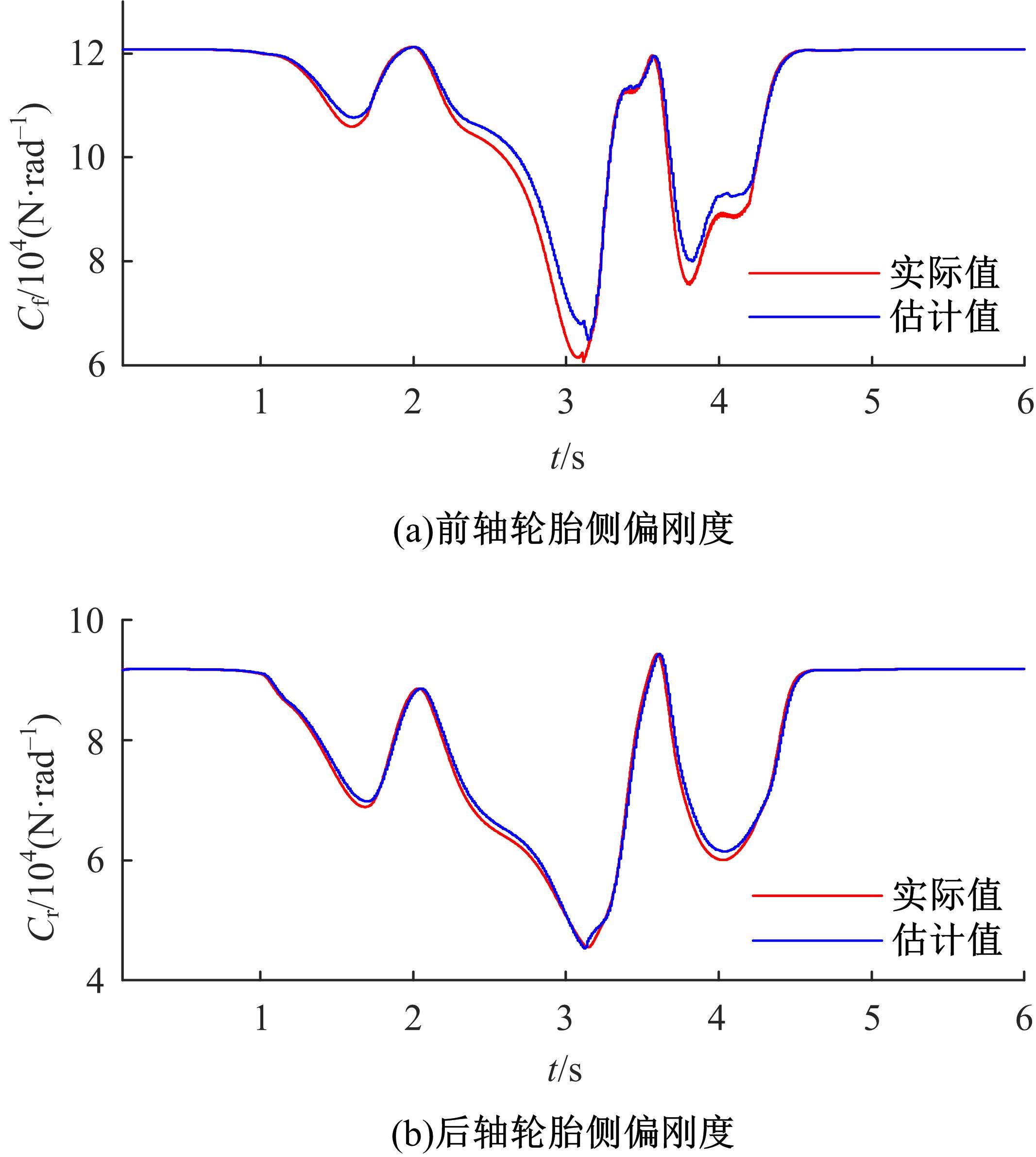
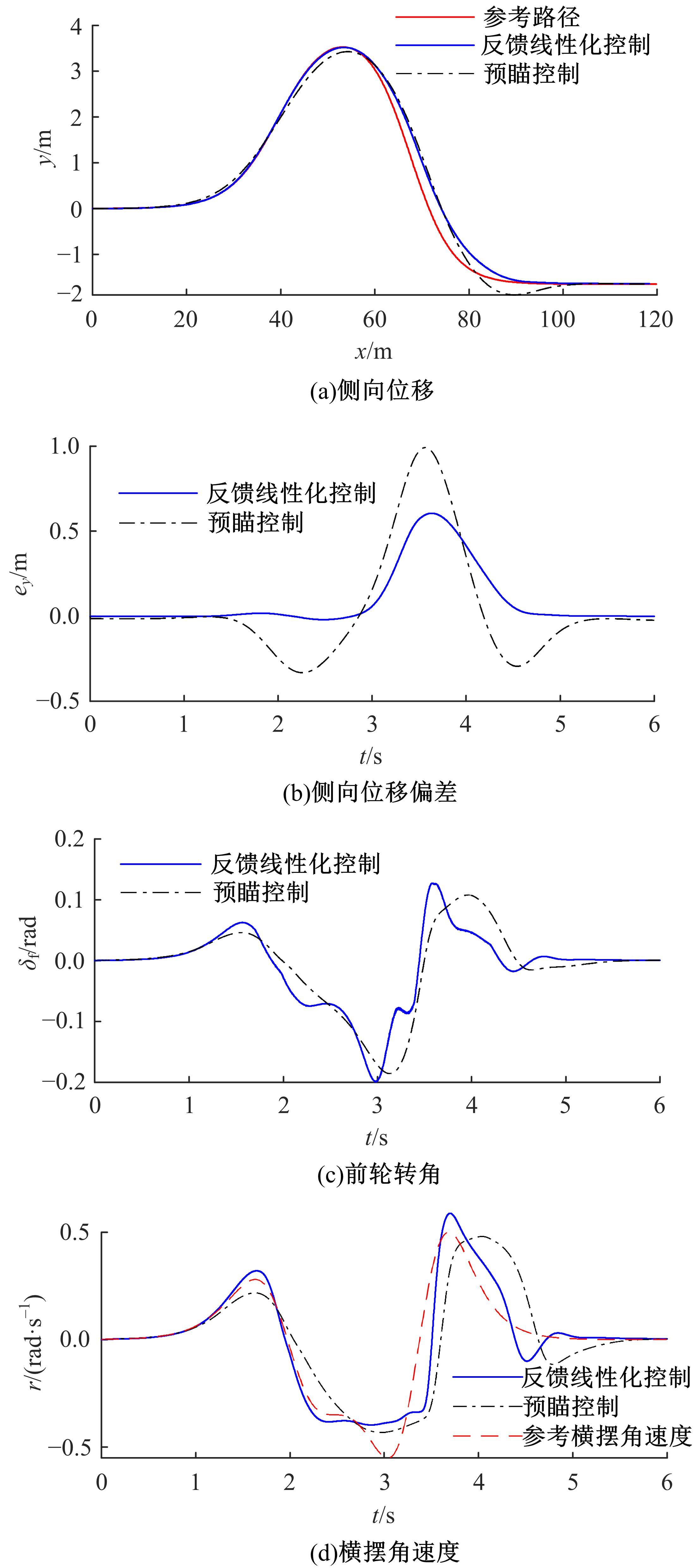
针对智能汽车纵横向耦合非线性导致的控制系统模型复杂度高以及轮胎侧偏刚度不确定性影响控制效果的问题,提出了一种基于轮胎侧偏刚度估计的纵横向整体反馈线性化控制方法。首先,建立智能汽车纵横向耦合动力学模型和轨迹跟踪偏差模型;其次,对车辆模型的线性化条件进行了判定,利用李雅普诺夫稳定性分析方法设计了可以保证系统稳定和跟踪误差渐近收敛的虚拟控制律;然后,对轮胎侧偏刚度进行了实时估计;最后,通过基于CarSim/Simulink的高速紧急双移线仿真实验,验证了本文提出的方法可使智能汽车在纵横向耦合工况行驶时具有良好的轨迹跟踪性能和稳定性。
中图分类号:
- U461









| 1 | 李克强, 戴一凡, 李升波, 等. 智能网联汽车(ICV)技术的发展现状及趋势[J]. 汽车安全与节能学报, 2017, 8(1): 1-14. |
| Li Ke-qiang, Dai Yi-fan, Li Sheng-bo, et al. State-of-the-art and technical trends of intelligent and connected vehicles[J].Journal of Automotive Safety and Energy, 2017, 8(1): 1-14 | |
| 2 | 熊璐, 杨兴, 卓桂荣, 等. 无人驾驶车辆的运动控制发展现状综述[J]. 机械工程学报, 2020, 56(10):143-159. |
| Xiong Lu, Yang Xing, Zhuo Gui-rong, et al. Review on motion control of autonomous vehicles[J]. Journal of Mechanical Engineering, 2020, 56(10):143-159. | |
| 3 | Talvala K, Kritayakirana K, Gerdes J C. Pushing the limits: from lanekeeping to autonomous racing[J]. Annual Reviews in Control, 2011, 35(1): 137-148. |
| 4 | 陈吉清, 蓝庆生, 兰凤崇, 等. 基于轮胎力预判与拟合的轨迹跟踪控制[J]. 吉林大学学报: 工学版, 2020, 50(5): 1565-1573. |
| Chen Ji-qing, Lan Qing-sheng, Lan Feng-chong,et al.Trajectory tracking control based on tire force prediction and fitting[J]. Journal of Jilin University(Engineering and Technology Edition),2020,50(5):1565-1573. | |
| 5 | Ni J, Hu J. Dynamics control of autonomous vehicle at driving limits and experiment on an autonomous formula racing car[J]. Mechanical Systems and Signal Processing,2017, 90: 154-174. |
| 6 | Ni J, Zhou J, Hu J, et al. Robust path following control at driving/handling limits of an autonomous electric racecar[J]. IEEE Transactions on Vehicular Technology, 2019, 68(6): 5518-5526. |
| 7 | Kapania N R, Gerdes J. C. Design of a feedback-feedforward steering controller for accurate path tracking and stability at the limits of handling[J]. Vehicle System Dynamics, 2015, 53(12): 1-18. |
| 8 | Wu J, Kong Q F, Yang K M, et al. Research on the steering torque control for intelligent vehicles co-driving with the penalty factor of human-machine intervention[J].IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2023,53(1): 59-70. |
| 9 | 陈龙, 解云鹏, 蔡英凤,等. 极限工况下无人驾驶车辆稳定跟踪控制[J]. 汽车工程, 2020, 42(8):1016-1026. |
| Chen Long, Xie Yun-peng, Cai Ying-feng, et al. Stable tracking control of autonomous vehicles at extreme conditions [J]. Automotive Engineering, 2020,42(8): 1016-1026. | |
| 10 | Wachter E, Alirezaei M, Bruzelius F, et al. Path control in limit handling and drifting conditions using State Dependent Riccati Equation technique [J]. Proceedings of the Institution of Mechanical Engineers Part D Journal of Automobile Engineering, 2019, 234(2/3): 783-791. |
| 11 | 许芳, 张君明, 胡云峰, 等. 智能车辆路径跟踪横纵向耦合实时预测控制器[J]. 吉林大学学报:工学版, 2021,51(6): 2287-2294. |
| Xu Fang, Zhang Jun-ming, Hu Yun-feng,et al.Lateral and longitudinal coupling real⁃time predictive controller for intelligent vehicle path tracking[J].Journal of Jilin University(Engineering and Technology Edition),2021,51(6): 2287-2294. | |
| 12 | Goh J Y, Goel T, Gerdes J C. Towards automated vehicle control beyond the stability limits: drifting along a general path[J]. Journal of Dynamic Systems Measurement and Control, 2020, 142(2): 1-10. |
| 13 | Guo J H, Luo Y G, Li K Q. Adaptive non-linear trajectory tracking control for lane change of autonomous four-wheel independently drive electric vehicles[J]. IET Intelligent Transport Systems, 2018, 12(7):712-720. |
| 14 | Wang C Y, Zhao W Z, Luan Z K, et al. Decoupling control of vehicle chassis system based on neural network inverse system[J]. Mechanical Systems & Signal Processing, 2018,106: 176-197. |
| 15 | 梁艺潇, 李以农, 余颖弘, 等. 基于神经网络逆系统的智能汽车纵横向解耦控制[J]. 湖南大学学报: 自然科学版, 2019,46(10): 26-35. |
| Liang Yi-xiao, Li Yi-nong, Yu Ying-hong, et al. Decoupling control of longitudinal and lateral motion for intelligent vehicle based on neural network inverse method[J]. Journal of Hunan University (Natural Sciences), 2019, 46(10): 26-35. | |
| 16 | Tork N, Amirkhani A, Shokouhi S B. An adaptive modified neural lateral-longitudinal control system for path following of autonomous vehicles[J]. Engineering Science and Technology an International Journal, 2021, 24(1): 126-137. |
| 17 | Brown M, Gerdes J C. Coordinating tire forces to avoid obstacles using nonlinear model predictive control[J]. IEEE Transactions on Intelligent Vehicles, 2020, 5(1): 21-31. |
| 18 | Gao Y, Gray A, Tseng H E, et al. A tube-based robust nonlinear predictive control approach to semiautonomous ground vehicles[J]. Vehicle System Dynamics, 2014, 52(6): 802-823. |
| 19 | Dang D, Gao F, Hu Q. Motion planning for autonomous vehicles considering longitudinal and lateral dynamics coupling[J]. Applied Sciences, 2020, 10(9):3180. |
| 20 | Menhour L, d'Andréa-Novel B, Fliess M, et al. Coupled nonlinear vehicle control: flatness-based setting with algebraic estimation techniques[J]. Control Engineering Practice, 2014, 22(1): 135-146. |
| 21 | Wang Y Q, Shi S M, Gao S, et al. Active steering and driving/ braking coupled control based on flatness theory and a novel reference calculation method[J]. IEEE Access, 2019,7: 180661-180670. |
| 22 | Wang Z, Zha J, Wang J. Autonomous vehicle trajectory following: a flatness model predictive control approach with hardware-in-the-loop verification[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(9): 5613-5623. |
| 23 | 刘子龙. 基于反馈线性化的无人驾驶车辆横向位置跟踪控制[J]. 系统工程与电子技术, 2009,31(1):170-174. |
| Liu Zi-long. Lateral position tracking control of unpiloted vehicle based on feedback-linearization[J]. Systems Engineering and Electronics, 2009,31(1):170-174. | |
| 24 | 许洪国, 彭涛, 刘宏飞,等. 半挂汽车转向稳定性反馈线性化控制[J]. 吉林大学学报:工学版, 2012,42(2):17-23. |
| Xu Hong-guo, Peng Tao, Liu Hong-fei, et al. Feedback linearization for steering stability control of tractor-semitrailer[J]. Journal of Jilin University(Engineering and Technology Edition), 2012,42(2): 17-23. | |
| 25 | Ji X, He X, Lyu C, et al. Adaptive-neural-network-based robust lateral motion control for autonomous vehicle at driving limits[J]. Control Engineering Practice, 2018, 76: 41-53. |
| 26 | Bakker E, Nyborg L, Pacejka H B. Tyre modeling for use in vehicle dynamics studies[C]∥SAE Paper, 1987: No.870421. |
| 27 | Yu Y, Li Y, Liang Y, et al. Dynamic decoupling and trajectory tracking for automated vehicles based on the inverse system[J]. Applied Sciences, 2020, 10(21): 7394. |
| 28 | Dang D, Gao F, Hu Q. Motion planning for autonomous vehicles considering longitudinal and lateral dynamics coupling[J]. Applied Sciences, 2020,10(9): 3180. |
| 29 | Yang S, Peng W, Yi T. Feedback linearization-based current control strategy for modular multilevel converters[J]. IEEE Transactions on Power Electronics, 2017, 33(1):161-174. |
| 30 | Cho W, Yoon J, Yim S, et al. Estimation of tire torces for application to vehicle stability control[J]. IEEE Transactions on Vehicular Technology, 2010, 59(2): 638-649. |
| 31 | 王玉琼, 高松, 王玉海, 等. 高速无人驾驶车辆轨迹跟踪和稳定性控制[J]. 浙江大学学报:工学版, 2021, 55(10):1922-1929, 1947. |
| Wang Yu-qiong, Gao Song, Wang Yu-hai, et al. Trajectory tracking and stability control of high-speed autonomous vehicle[J]. Journal of Zhejiang University (Engineering Science), 2021, 55(10):1922-1929, 1947. |
| [1] | 田彦涛,许富强,王凯歌,郝子绪. 考虑周车信息的自车期望轨迹预测[J]. 吉林大学学报(工学版), 2023, 53(3): 674-681. |
| [2] | 谢波,高榕,许富强,田彦涛. 低附着路况条件下人车共享转向系统稳定控制[J]. 吉林大学学报(工学版), 2023, 53(3): 713-725. |
| [3] | 何科,丁海涛,赖宣淇,许男,郭孔辉. 基于Transformer的轮式里程计误差预测模型[J]. 吉林大学学报(工学版), 2023, 53(3): 653-662. |
| [4] | 田彦涛,季言实,唱寰,谢波. 深度强化学习智能驾驶汽车增广决策模型[J]. 吉林大学学报(工学版), 2023, 53(3): 682-692. |
| [5] | 何科,丁海涛,许男,郭孔辉. 基于摄像头和车道线的增强定位系统[J]. 吉林大学学报(工学版), 2023, 53(3): 663-673. |
| [6] | 朱冰,范天昕,赵健,张培兴,孙宇航. 基于危险边界搜索的自动驾驶系统加速测试方法[J]. 吉林大学学报(工学版), 2023, 53(3): 704-712. |
| [7] | 王登峰,陈宏利,那景新,陈鑫. 单双搭接接头经高温老化后的失效对比[J]. 吉林大学学报(工学版), 2023, 53(2): 346-354. |
| [8] | 张佩,王志伟,杜常清,颜伏伍,卢炽华. 车用质子交换膜燃料电池空气系统过氧比控制方法[J]. 吉林大学学报(工学版), 2022, 52(9): 1996-2003. |
| [9] | 隗海林,王泽钊,张家祯,刘洋. 基于Avl-Cruise的燃料电池汽车传动比及能量管理策略[J]. 吉林大学学报(工学版), 2022, 52(9): 2119-2129. |
| [10] | 刘岩,丁天威,王宇鹏,都京,赵洪辉. 基于自适应控制的燃料电池发动机热管理策略[J]. 吉林大学学报(工学版), 2022, 52(9): 2168-2174. |
| [11] | 李丞,景浩,胡广地,刘晓东,冯彪. 适用于质子交换膜燃料电池系统的高阶滑模观测器[J]. 吉林大学学报(工学版), 2022, 52(9): 2203-2212. |
| [12] | 王克勇,鲍大同,周苏. 基于数据驱动的车用燃料电池故障在线自适应诊断算法[J]. 吉林大学学报(工学版), 2022, 52(9): 2107-2118. |
| [13] | 曹起铭,闵海涛,孙维毅,于远彬,蒋俊宇. 质子交换膜燃料电池低温启动水热平衡特性[J]. 吉林大学学报(工学版), 2022, 52(9): 2139-2146. |
| [14] | 陈凤祥,伍琪,李元松,莫天德,李煜,黄李平,苏建红,张卫东. 2.5吨燃料电池混合动力叉车匹配、仿真及优化[J]. 吉林大学学报(工学版), 2022, 52(9): 2044-2054. |
| [15] | 武小花,余忠伟,朱张玲,高新梅. 燃料电池公交车模糊能量管理策略[J]. 吉林大学学报(工学版), 2022, 52(9): 2077-2084. |
|
||