吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (4): 1030-1039.doi: 10.13229/j.cnki.jdxbgxb.20210776
• 交通运输工程·土木工程 • 上一篇
定位噪声统计特性未知的变分贝叶斯协同目标跟踪
陈小波( ),陈玲
),陈玲
- 江苏大学 汽车工程研究院,江苏 镇江 212013
Variational Bayesian cooperative target tracking with unknown localization noise statistics
Xiao-bo CHEN(),Ling CHEN
- Automotive Engineering Research Institute,Jiangsu University,Zhenjiang 212013,China
摘要:
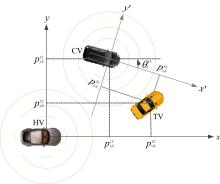
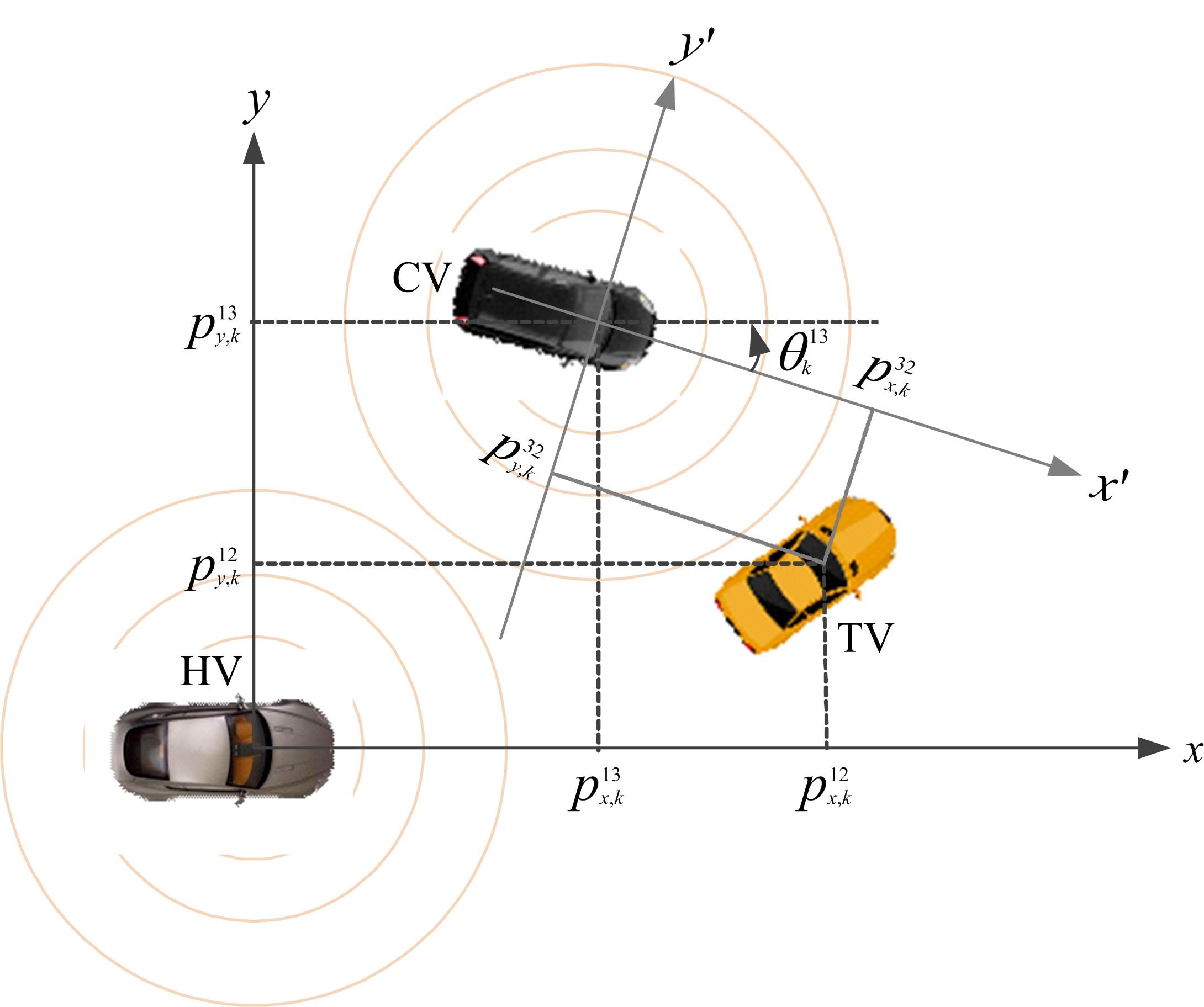
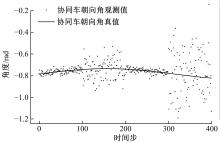
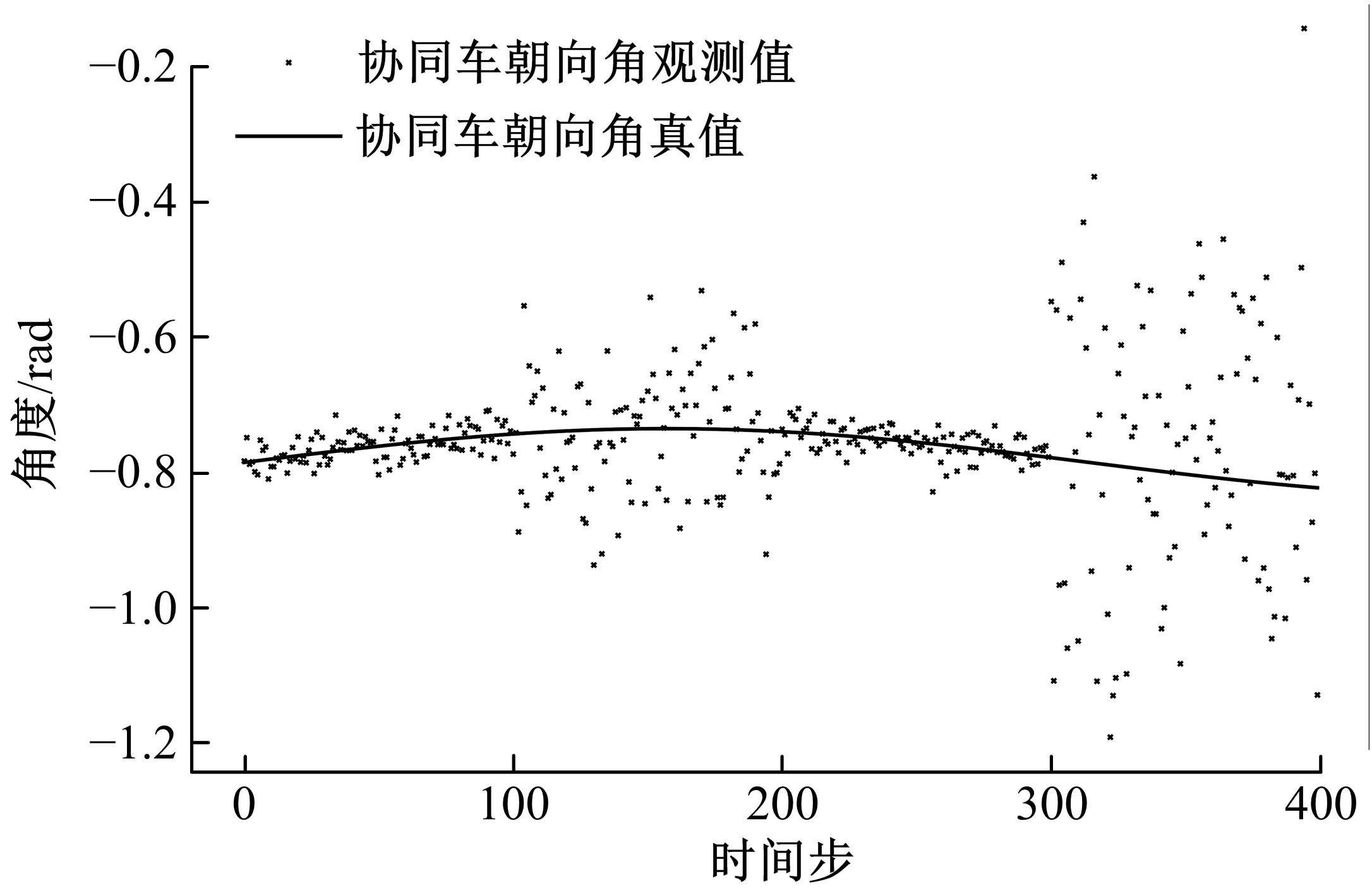
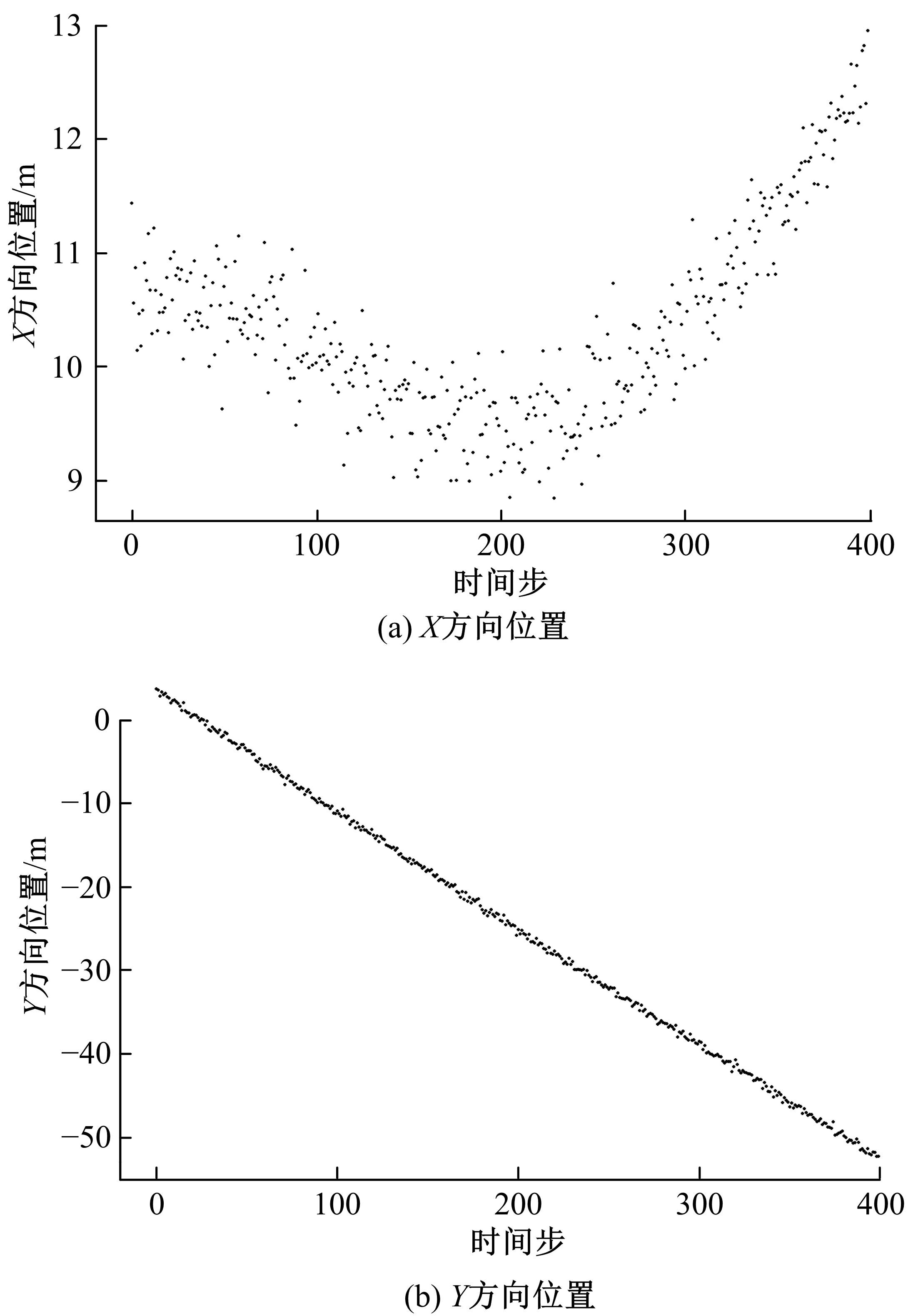
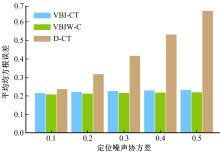
为增强定位噪声统计特性未知情况下协同目标跟踪的可靠性,提出一种联合估计目标和协同车状态以及定位噪声统计参数的贝叶斯模型。为实现递推估计,设计了在线变分贝叶斯推断算法。仿真结果表明,当定位噪声的统计特性未知且随时间动态变化时,该算法可以有效提高目标跟踪的精度,与单车跟踪相比,协同跟踪误差可以降低18.7%~23.6%,与其他协同算法相比,误差可以降低4.8%~9.7%。
中图分类号:
- TP301.6








| 1 | Li Q L, Song L P, Zhang Y Q. Multiple extended target tracking by truncated JPDA in a clutter environment[J]. IET Signal Processing, 2021, 15(3): 207-219. |
| 2 | 邱成,王浩,刘凤江,等. 基于EKF的毫米波雷达多目标跟踪算法研究[J]. 现代电子技术, 2021, 44(15):7-11. |
| Qiu Cheng, Wang Hao, Liu Feng-jiang, et al. Research on millimeter wave radar multi-target tracking algorithm based on EKF[J]. Modern Electronics Technique, 2021, 44(15): 7-11. | |
| 3 | Qiu H, Qiu M K, Lu Z H, et al. An efficient key distribution system for data fusion in V2X heterogeneous networks[J]. Information Fusion, 2019, 50: 212-220. |
| 4 | 肖瑶, 刘会衡, 程晓红. 车联网关键技术及其发展趋势与挑战[J]. 通信技术, 2021, 54(1):1-8. |
| Xiao Yao, Liu Hui-heng, Cheng Xiao-hong. Key technologies of Internet of vehicles and their development trends and challenges[J]. Communications Technology, 2021, 54(1): 1-8. | |
| 5 | 徐山. 4G/5G协同组网规划与优化探究[J]. 中国新通信, 2021, 23(11):125-126. |
| Xu Shan. Research on 4G/5G cooperative network planning and optimization[J]. China New Telecommunications, 2021, 23(11): 125-126. | |
| 6 | Aroonrot C, Yaowapa C, Chunho Y. Development of the cooperative intelligent transport system in thailand: a prospective approach[J]. Infrastructures, 2021, 6(3): No.36. |
| 7 | Liggins M E, Hall D L, Llinas J. Handbook of Multisensor Data Fusion: Theory and Practice, Second Edition[M]. Boca Raton: CRC Press, 2009. |
| 8 | Chen Q, Tang S H, Yang Q, et al. Cooper: cooperative perception for connected autonomous vehicles based on 3d point clouds[C]∥2019 IEEE 39th International Conference on Distributed Computing Systems (ICDCS), Dallas, TX, USA, 2019: 514-524. |
| 9 | Qian C, Zhang H J, Li W Z, et al. Cooperative Gnss-rtk ambiguity resolution with gnss, ins, and lidar data for connected vehicles[J]. Remote Sensing, 2020, 12(6): No.949. |
| 10 | Michael G, Holger D, Tobias M, et al. Infrastructure-supported Perception and Track-level Fusion using Edge Computing[C]∥2019 IEEE Intelligent Vehicles Symposium (IV), Paris, France, 2019: 1739-1745. |
| 11 | Chen X B, Ji J Y, Wang Y J. Robust cooperative multi-vehicle tracking with inaccurate self-localization based on on-board sensors and inter-vehicle communication[J]. Sensors, 2020, 20(11): 3212. |
| 12 | Nadarajah N, Peter J G. Teunissen,et al. Instantaneous BeiDou–GPS attitude determination: A performance analysis[J]. Advances in Space Research, 2014, 54(5): 851-862. |
| 13 | Hu Z T, Yang Lin L, Jin Y, et al. Strong tracking PHD filter based on variational bayesian with inaccurate process and measurement noise covariance[J]. Sensors(Basel, Switzerland), 2021, 21(4): No.1126. |
| 14 | He R K, Chen S X, Wu H, et al. Efficient extended cubature Kalman filtering for nonlinear target tracking[J]. International Journal of Systems Science, 2021, 52(2): 392-406. |
| 15 | Gelman A, Carlin J B, Stern H S, et al. Bayesian Data Analysis[M], 3rd ed. Boca Raton: Chapman and Hal, 2014: 72-74. |
| 16 | Blei D M, Kucukelbir A, McAuliffe J D. Variational inference: a review for statisticians[J]. Journal of the American Statistical Association, 2017, 112(518): 859-877. |
| 17 | Zhu H, Hu J S, Henry L, et al. Recursive variational bayesian inference to simultaneous registration and fusion[J]. International Journal of Advanced Robotic Systems, 2016, 13(3): 1560-1573. |
| 18 | Chen X B, Wang Y J, Chen L, et al. Multi-vehicle cooperative target tracking with time-varying localization uncertainty via recursive variational Bayesian inference[J]. Sensors, 2020, 20(22): No.6487. |
| [1] | 赵睿,李云,胡宏宇,高镇海. 基于V2I通信的交叉口车辆碰撞预警方法[J]. 吉林大学学报(工学版), 2023, 53(4): 1019-1029. |
| [2] | 杨红波,史文库,陈志勇,郭年程,赵燕燕. 基于NSGA⁃II的斜齿轮宏观参数多目标优化[J]. 吉林大学学报(工学版), 2023, 53(4): 1007-1018. |
| [3] | 何科,丁海涛,许男,郭孔辉. 基于摄像头和车道线的增强定位系统[J]. 吉林大学学报(工学版), 2023, 53(3): 663-673. |
| [4] | 朱冰,范天昕,赵健,张培兴,孙宇航. 基于危险边界搜索的自动驾驶系统加速测试方法[J]. 吉林大学学报(工学版), 2023, 53(3): 704-712. |
| [5] | 田彦涛,许富强,王凯歌,郝子绪. 考虑周车信息的自车期望轨迹预测[J]. 吉林大学学报(工学版), 2023, 53(3): 674-681. |
| [6] | 高松,王玉琼,王玉海,徐艺,周英超,王鹏伟. 智能汽车纵横向整体反馈线性化控制[J]. 吉林大学学报(工学版), 2023, 53(3): 735-745. |
| [7] | 谢波,高榕,许富强,田彦涛. 低附着路况条件下人车共享转向系统稳定控制[J]. 吉林大学学报(工学版), 2023, 53(3): 713-725. |
| [8] | 何科,丁海涛,赖宣淇,许男,郭孔辉. 基于Transformer的轮式里程计误差预测模型[J]. 吉林大学学报(工学版), 2023, 53(3): 653-662. |
| [9] | 刘嫣然,孟庆瑜,郭洪艳,李嘉霖. 图注意力模式下融合高精地图的周车轨迹预测[J]. 吉林大学学报(工学版), 2023, 53(3): 792-801. |
| [10] | 田彦涛,季言实,唱寰,谢波. 深度强化学习智能驾驶汽车增广决策模型[J]. 吉林大学学报(工学版), 2023, 53(3): 682-692. |
| [11] | 张建,刘金波,高原,刘梦可,高振海,杨彬. 基于多模交互的车载传感器定位算法[J]. 吉林大学学报(工学版), 2023, 53(3): 772-780. |
| [12] | 王登峰,陈宏利,那景新,陈鑫. 单双搭接接头经高温老化后的失效对比[J]. 吉林大学学报(工学版), 2023, 53(2): 346-354. |
| [13] | 张佩,王志伟,杜常清,颜伏伍,卢炽华. 车用质子交换膜燃料电池空气系统过氧比控制方法[J]. 吉林大学学报(工学版), 2022, 52(9): 1996-2003. |
| [14] | 隗海林,王泽钊,张家祯,刘洋. 基于Avl-Cruise的燃料电池汽车传动比及能量管理策略[J]. 吉林大学学报(工学版), 2022, 52(9): 2119-2129. |
| [15] | 刘岩,丁天威,王宇鹏,都京,赵洪辉. 基于自适应控制的燃料电池发动机热管理策略[J]. 吉林大学学报(工学版), 2022, 52(9): 2168-2174. |
|
||