吉林大学学报(工学版) ›› 2021, Vol. 51 ›› Issue (4): 1230-1240.doi: 10.13229/j.cnki.jdxbgxb20200642
• 车辆工程·机械工程 • 上一篇
适用于非线性主动悬架滑模控制的线性干扰观测器
龙江启1( ),向锦涛1,俞平1(),王骏骋2
),向锦涛1,俞平1(),王骏骋2
- 1.温州大学 机电工程学院,浙江 温州 325000
2.浙江理工大学 机械与自动控制学院,杭州 310018
Linear disturbance observer suitable for sliding mode control of nonlinear active suspension
Jiang-qi LONG1(),Jin-tao XIANG1,Ping YU1(),Jun-cheng WANG2
- 1.College of Mechanical and Electrical Engineering,Wenzhou University,Wenzhou 325000,China
2.Faculty of Mechanical Engineering and Automation,Zhejiang Sci-Tech University,Hangzhou 310018,China
摘要:
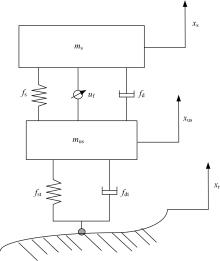
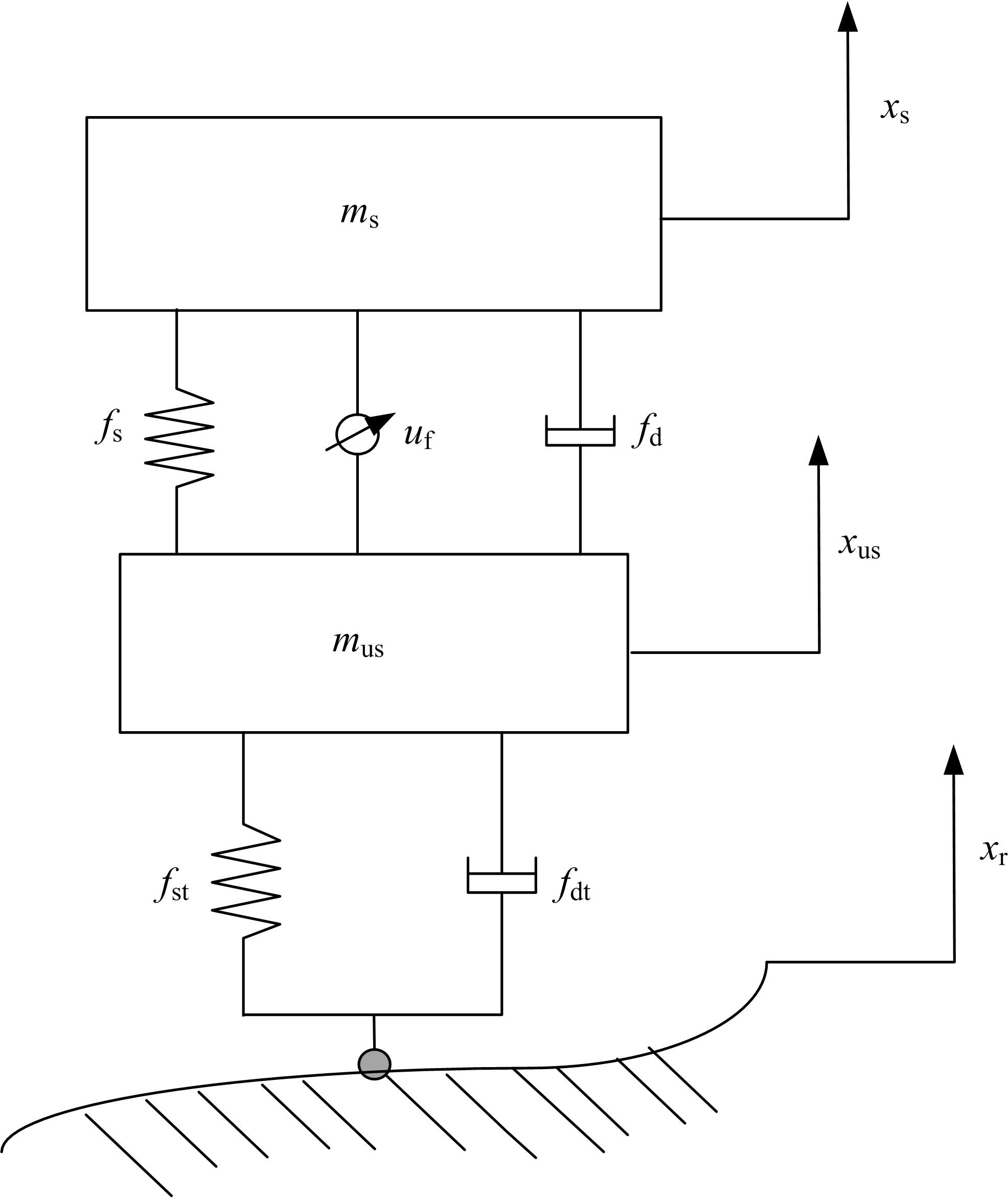
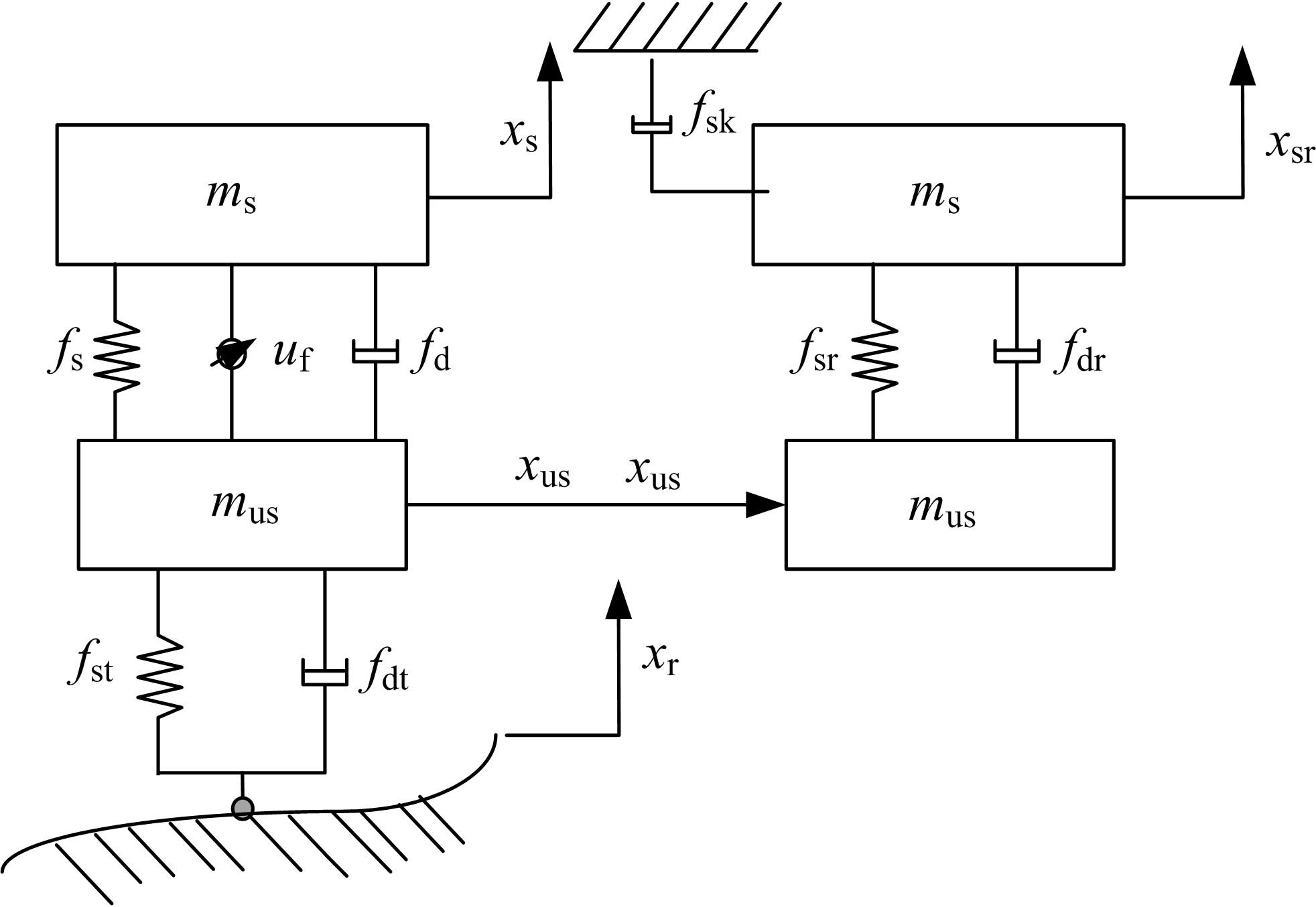
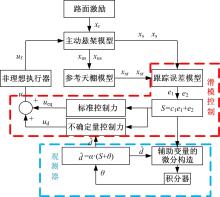
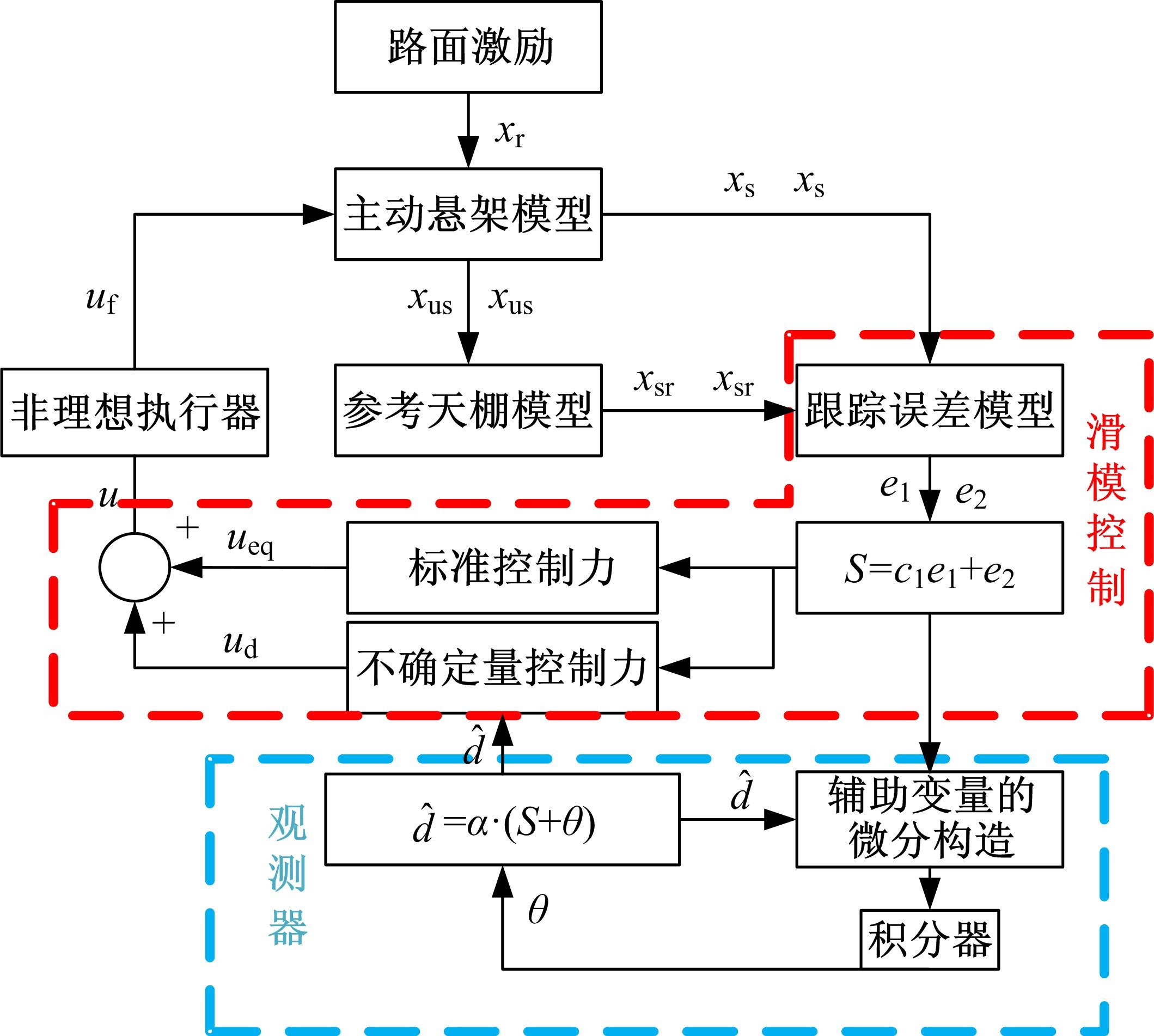
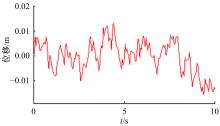
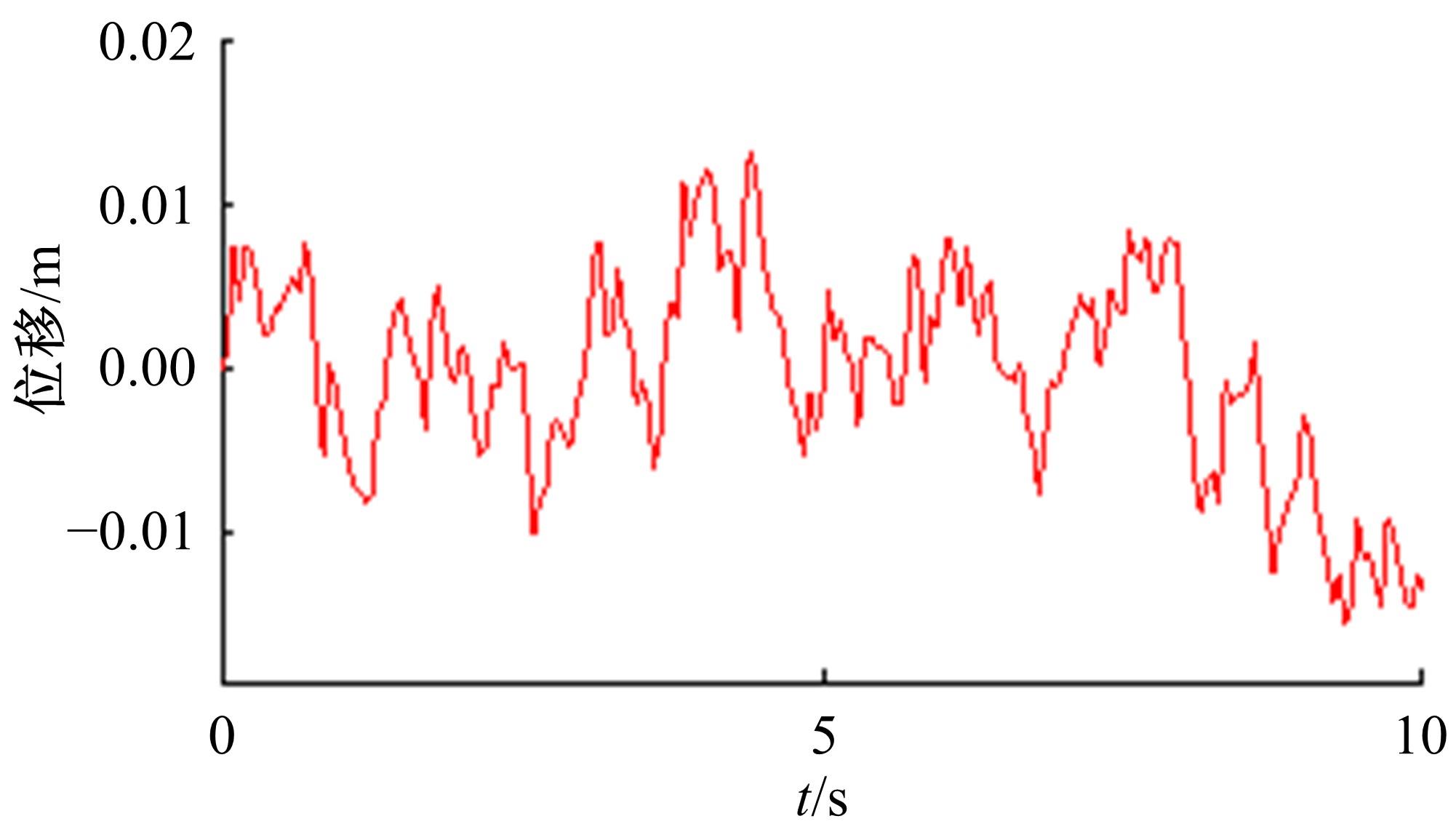
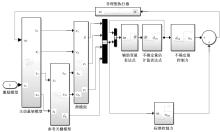
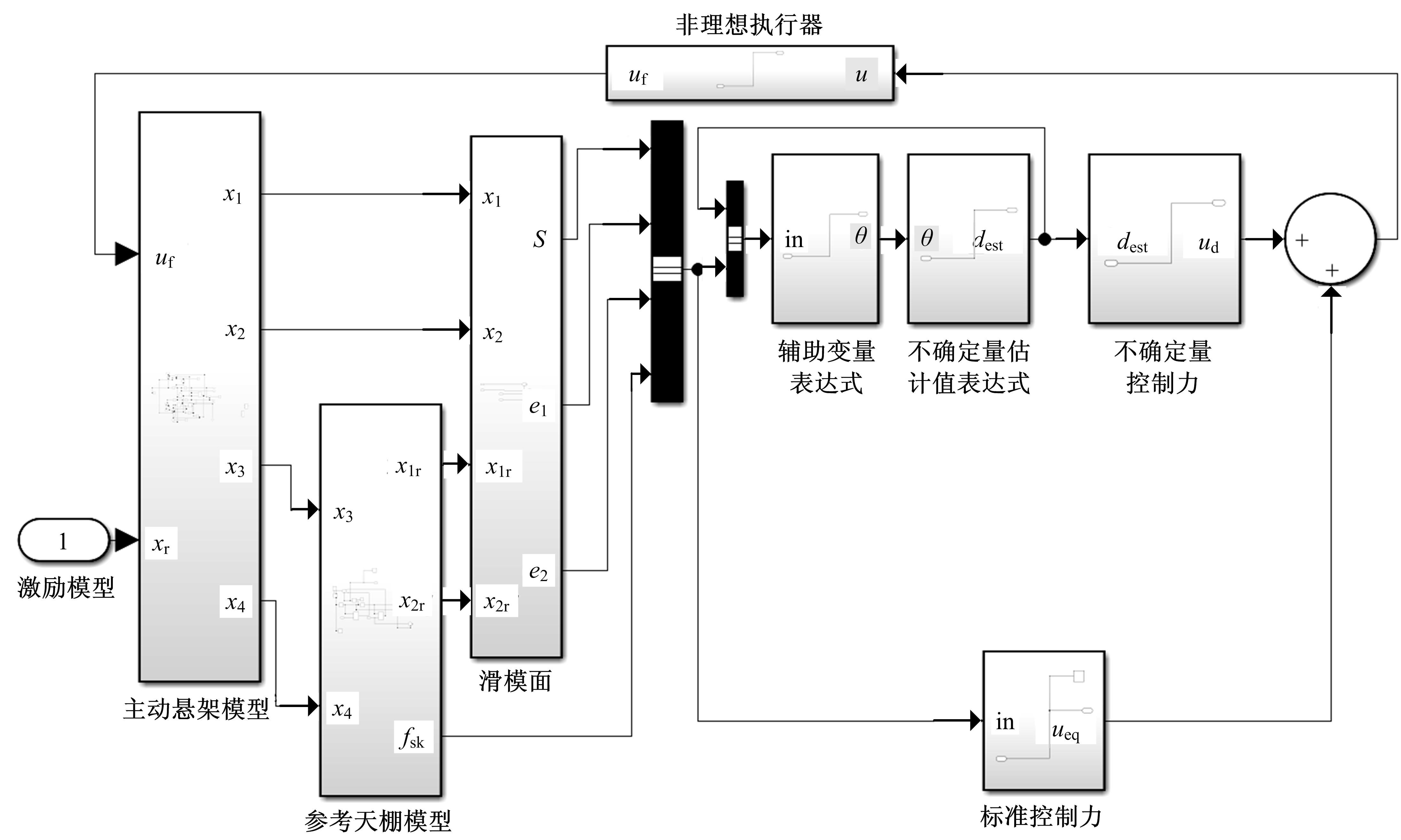
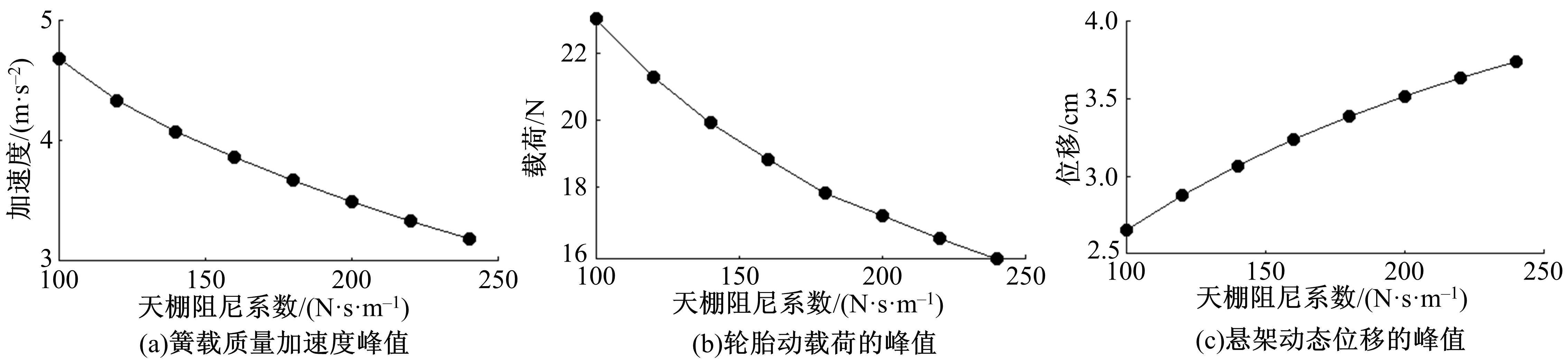
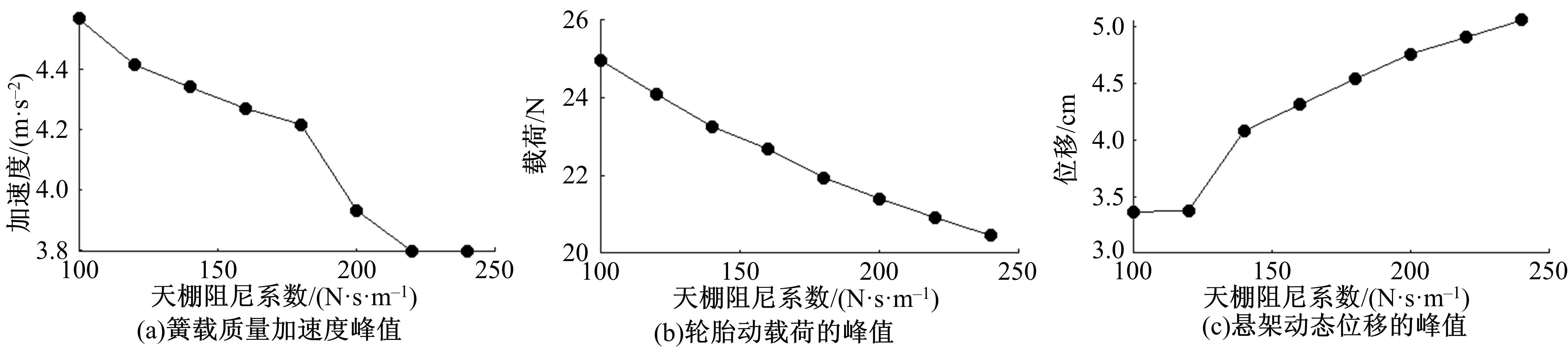
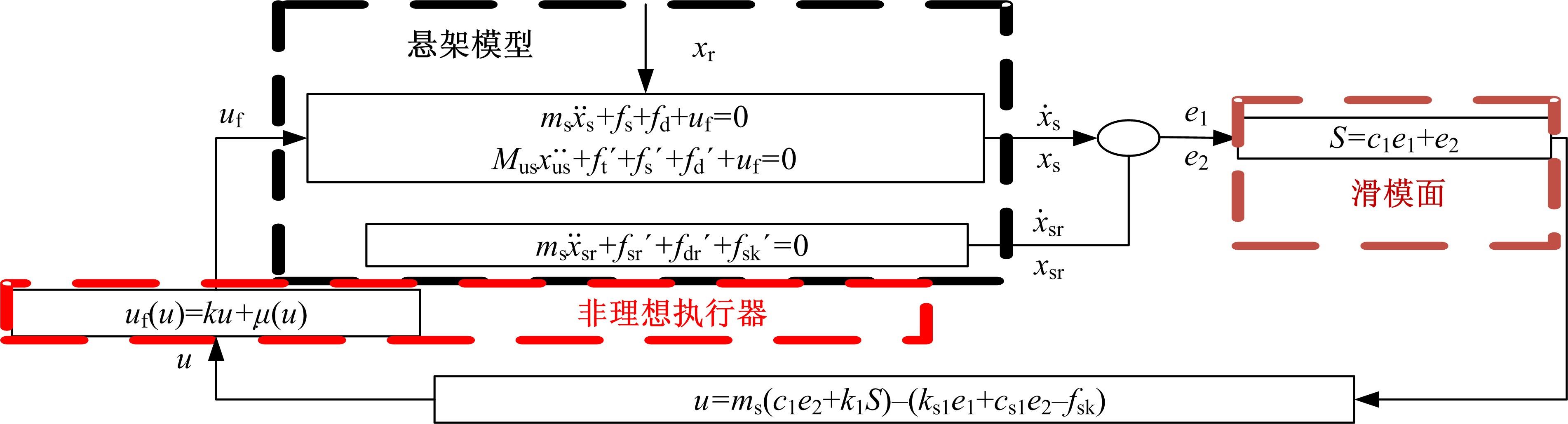
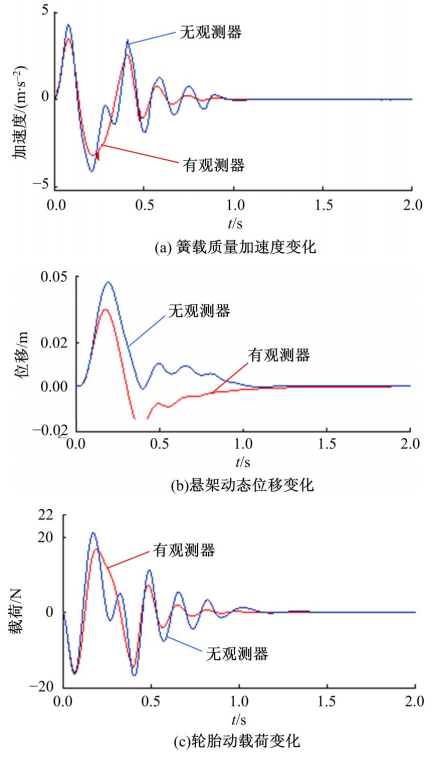
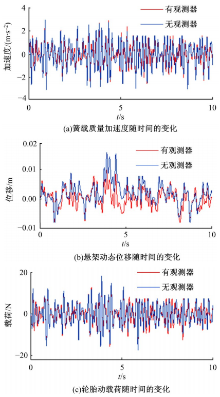
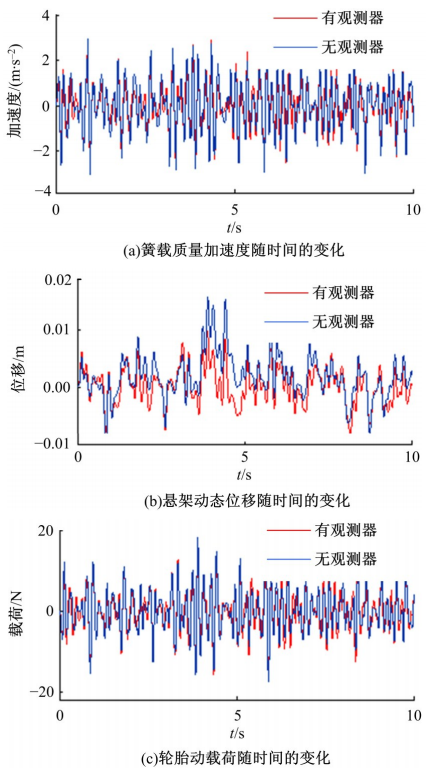
基于参考天棚模型主动悬架中存在力的非线性特性、参数不确定以及执行器非理想性等问题,为了削弱这些问题对控制效果的影响,提出一种用于估计非线性参量以及参数不确定、非理想执行器所引起的不确定量的线性干扰观测器,结合滑模控制建立了带有干扰观测器的控制系统;分析了天棚阻尼系数和不确定量对主动悬架控制效果的影响,给出了最优天棚阻尼的选取方法,验证了干扰观测器的有效性;最后,仿真模拟了所提出的控制算法在凸块以及C级路面行驶工况下的控制效果,结果显示:相比于传统没有观测器的基于参考天棚模型的滑模控制,所设计的含有观测器的基于参考天棚模型滑模控制算法在舒适性、稳定性以及安全性方面都有所提升。
中图分类号:
- U461.4

| 1 | Pang H, Zhang X, Xu Z. Adaptive backstepping-based tracking control design for nonlinear active suspension system with parameter uncertainties and safety constraints[J]. Isa Transactions, 2019, 88: 23-36. |
| 2 | Ma X, Wong P K, Zhao J. Practical multi-objective control for automotive semi-active suspension system with nonlinear hydraulic adjustable damper[J]. Mechanical Systems and Signal Processing, 2019, 117: 667-688. |
| 3 | Jing H, Wang R, Li C, et al. Robust finite-frequency H∞ control of full-car active suspension[J]. Journal of Sound and Vibration, 2019, 441: 221-239. |
| 4 | Pusadkar U S, Chaudhari S, Shendge P D, et al. Linear disturbance observer based sliding mode control for active suspension systems with non-ideal actuator[J]. Journal of Sound and Vibration, 2019, 442: 428-444. |
| 5 | Pan H, Sun W, Jing X, et al. Adaptive tracking control for active suspension systems with non-ideal actuators[J]. Journal of Sound and Vibration, 2017, 399: 2-20. |
| 6 | Pang H, Zhang X, Yang J, et al. Adaptive backstepping-based control design for uncertain nonlinear active suspension system with input delay[J]. International Journal of Robust and Nonlinear Control, 2019, 29(16): 5781-5800. |
| 7 | 于树友,曹瑞丽,刘清宇,等.具有双层控制结构的馈能悬架输出反馈控制策略[J].吉林大学学报:工学版,2020, 50(4): 1191-1200. |
| Yu Shu-you, Cao Rui-li, Liu Qing-yu, et al. Two-layered output feedback control of energy-regenerative suspensions[J]. Journal of Jilin University (Engineering and Technology Edition),2020, 50(4): 1191- 1200. | |
| 8 | Zhang J, Ding F, Zhang N, et al. A new SSUKF observer for sliding mode force tracking H∞ control of electrohydraulic active suspension[J]. Asian Journal of Control, 2020, 22(2): 761-778. |
| 9 | Li W, Xie Z, Zhao J, et al. Fuzzy finite-frequency output feedback control for nonlinear active suspension systems with time delay and output constraints[J]. Mechanical Systems and Signal Processing, 2019, 132: 315-334. |
| 10 | Liu Y J, Zeng Q, Liu L, et al. An adaptive neural network controller for active suspension systems with hydraulic actuator[J]. IEEE Transactions on Systems, Man, and Cybernetics, 2018, 50(12): 5351-5360. |
| 11 | Sun H, Li Y M, Tong S C. A fuzzy adaptive control strategy for active suspension systems with unknown dynamics[C]∥International Conference on Security, Pattern Analysis, and Cybernetics, Jinan, China,2018:No. 8965615. |
| 12 | 陈潇凯,王晨宇,施国标. 车辆主动悬架与电动助力转向系统协同优化[J].吉林大学学报:工学版,2020, 50(4): 1153-1159. |
| Chen Xiao-kai, Wang Chen-yu, Shi Guo-biao. Collaborative optimization of vehicle active suspension and electric power steering system[J]. Journal of Jilin University (Engineering and Technology Edition),2020, 50(4):1153-1159. | |
| 13 | 姚嘉凌,郑加强,蔡伟义.车辆半主动悬架模型参考滑模控制[J].农业机械学报,2008, 39(4):5-8, 38. |
| Yao Jia-ling, Zheng Jia-qiang, Cai Wei-yi. Sliding mode model-following control of automobile semi-active suspension system[J]. Transactions of the Chinese Society for Agricultural Machinery,2008, 39(4):5-8, 38. | |
| 14 | 侯力文.汽车悬架系统运动特性与半主动控制研究[D].济南:山东大学机械工程学院,2019. |
| Hou Li-wen. Research on motion characteristics and semi-active control of automobile suspension system[D]. Jinan: School of Mechanical Engineering, Shandong University,2019. | |
| 15 | 黄喆.基于状态观测器的主动悬架滑模控制研究[D]. 西安:长安大学汽车学院, 2019. |
| Huang Zhe. Research on active suspension sliding mode control based on state observer[D]. Xi'an:College of Automobile, Chang'an University, 2019. | |
| 16 | Xiao L. Uncertainty and disturbance estimator based control of active suspensions with a hydraulic actuator[J]. International Test Conference, 2016, 45(4): 376-383. |
| 17 | 秦武,上官文斌,吕辉.非线性二自由度主动悬架滑模控制方法的研究[J]. 机械工程学报,2020, 56(1): 58-68. |
| Qin Wu, Shangguan Wen-bin, Lv Hui. Research on sliding mode control for nonlinear active suspension with two degrees of freedom [J]. Chinese Journal of Mechanical Engineering,2020, 56(1): 58-68. | |
| 18 | 秦武,康英姿,上官文斌,等.基于天棚模型和扰动观测器的主动悬架滑模控制研究[J].华南理工大学学:自然科学版,2020, 48(6): 16-24, 33. |
| Qin Wu, Kang Ying-zi, Shangguan Wen-bin, et al. Study on sliding mode control with disturbance observer integrating skyhook model for active suspension[J]. Journal of South China University of Technology (Natural Science Edition), 2020, 48(6): 16-24, 33. | |
| 19 | Corina Sandu, Andersen Erik R, Steve Southward, et al. Multibody dynamics modelling and system identification of a quarter-car test rig with McPherson strut suspension[J]. Vehicle System Dynamics, 2011, 49(1/2): 153-179. |
| 20 | Zhou J. Brief paper: decentralized adaptive control for large-scale time-delay systems with dead-zone input[J]. Automatica, 2008, 44(7): 1790-1799. |
| 21 | Corless M, Leitmann G. Continuous state feedback guaranteeing uniform ultimate boundedness for uncertain dynamic systems[J]. IEEE Transactions on Automatic Control, 1981, 26(5): 1139-1144. |
| 22 | Sun W, Zhao Z, Gao H, et al. Saturated adaptive robust control for active suspension systems[J]. IEEE Transactions on Industrial Electronics, 2013, 60(9): 3889-3896. |
| [1] | 陈鑫,于贵申,张彪,潘凯旋,杨立飞. 搅拌摩擦点焊接头拉伸-剪切行为的等效建模[J]. 吉林大学学报(工学版), 2021, 51(4): 1190-1197. |
| [2] | 杨建,夏琦,周海超,王国林. 修正胎体弦轮廓载重子午线轮胎的降噪机理[J]. 吉林大学学报(工学版), 2021, 51(4): 1198-1203. |
| [3] | 宋大凤,杨丽丽,曾小华,王星琦,梁伟智,杨南南. 基于行驶工况合成的混合动力汽车电池寿命优化[J]. 吉林大学学报(工学版), 2021, 51(3): 781-791. |
| [4] | 张家旭,王欣志,赵健,施正堂. 汽车高速换道避让路径规划及离散滑模跟踪控制[J]. 吉林大学学报(工学版), 2021, 51(3): 1081-1090. |
| [5] | 何仁,赵晓聪,杨奕彬,王建强. 基于驾驶人风险响应机制的人机共驾模型[J]. 吉林大学学报(工学版), 2021, 51(3): 799-809. |
| [6] | 宋强,孙丹婷,章伟. 纯电动车机械式自动变速器换挡非线性建模及控制[J]. 吉林大学学报(工学版), 2021, 51(3): 810-819. |
| [7] | 王波,何洋扬,聂冰冰,许述财,张金换. 底部爆炸条件下车内乘员的腹部损伤[J]. 吉林大学学报(工学版), 2021, 51(3): 792-798. |
| [8] | 庄蔚敏,王鹏跃,高瑞娟,解东旋. 温热成形对AA5754铝合金静态力学性能的影响[J]. 吉林大学学报(工学版), 2021, 51(3): 847-854. |
| [9] | 李寿涛,王蕊,徐靖淳,王德军,田彦涛,于丁力. 一种基于模型预测复合控制的车辆避碰控制方法[J]. 吉林大学学报(工学版), 2021, 51(2): 738-746. |
| [10] | 王伟达,武燕杰,史家磊,李亮. 基于驾驶员意图识别的电子液压制动助力系统控制策略[J]. 吉林大学学报(工学版), 2021, 51(2): 406-413. |
| [11] | 陈国迎,姚军,王鹏,夏其坤. 适用于后轮轮毂驱动车辆的稳定性控制策略[J]. 吉林大学学报(工学版), 2021, 51(2): 397-405. |
| [12] | 马芳武,梁鸿宇,王强,蒲永锋. 双材料负泊松比结构的面内冲击动力学性能[J]. 吉林大学学报(工学版), 2021, 51(1): 114-121. |
| [13] | 吴岛,张立斌,张云翔,单洪颖,单红梅. 基于滑移率辨识的汽车制动时序视觉检测方法[J]. 吉林大学学报(工学版), 2021, 51(1): 206-216. |
| [14] | 张恩慧,何仁,苏卫东. 不同挡板结构对油箱内油液晃动特性的数值分析[J]. 吉林大学学报(工学版), 2021, 51(1): 83-95. |
| [15] | 熊璐,魏琰超,高乐天. 基于惯性测量单元/轮速融合的车辆零速检测方法[J]. 吉林大学学报(工学版), 2021, 51(1): 134-138. |
|
||